
A Safety Warning Algorithm Based on Axis Aligned Bounding Box Method to Prevent Onsite Accidents of Mobile Construction Machineries



Abstract
:1. Introduction
2. Literature Review
3. Research Methodology
3.1. Establishing Warning Rules
3.1.1. Determining Safety Distances
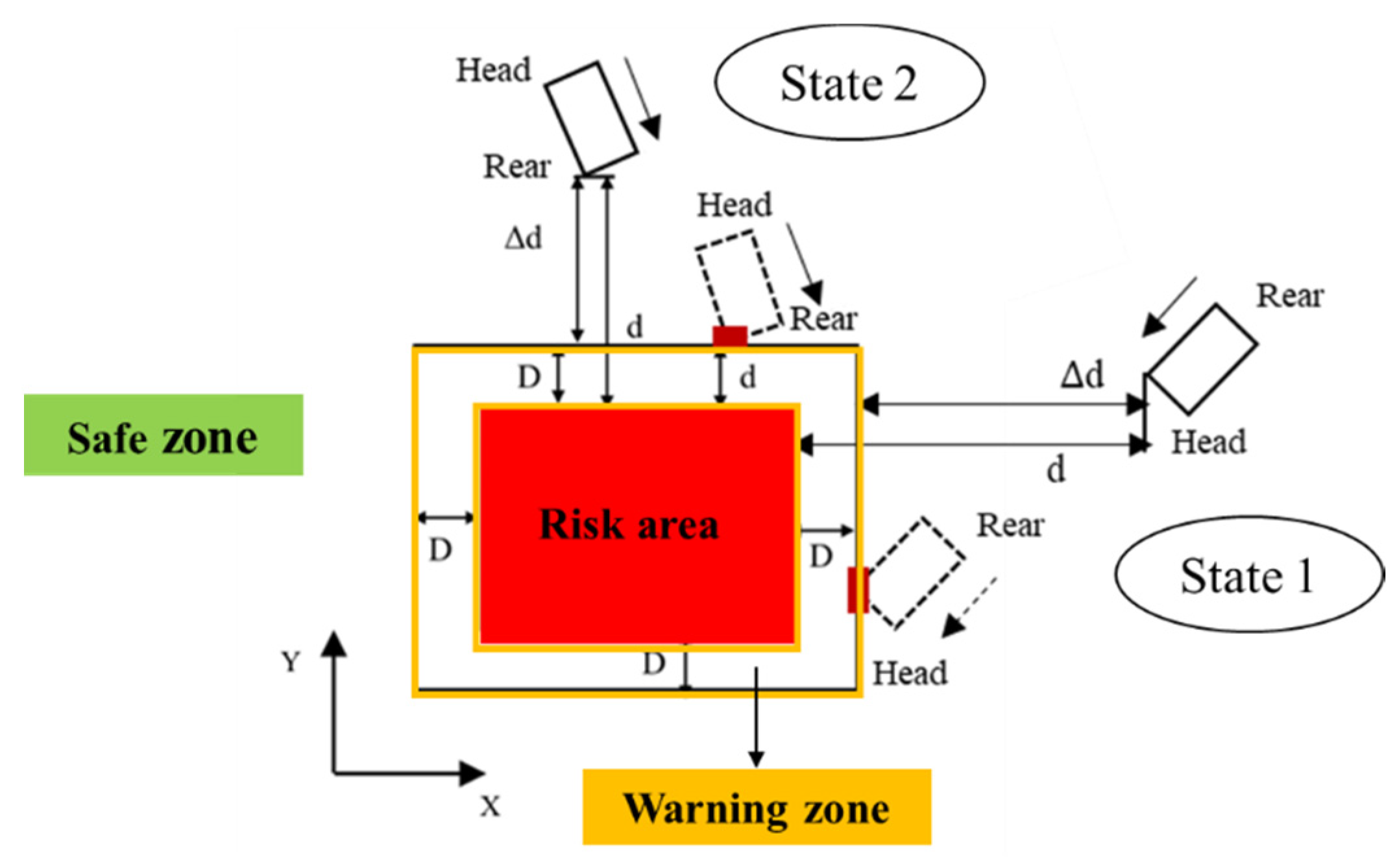
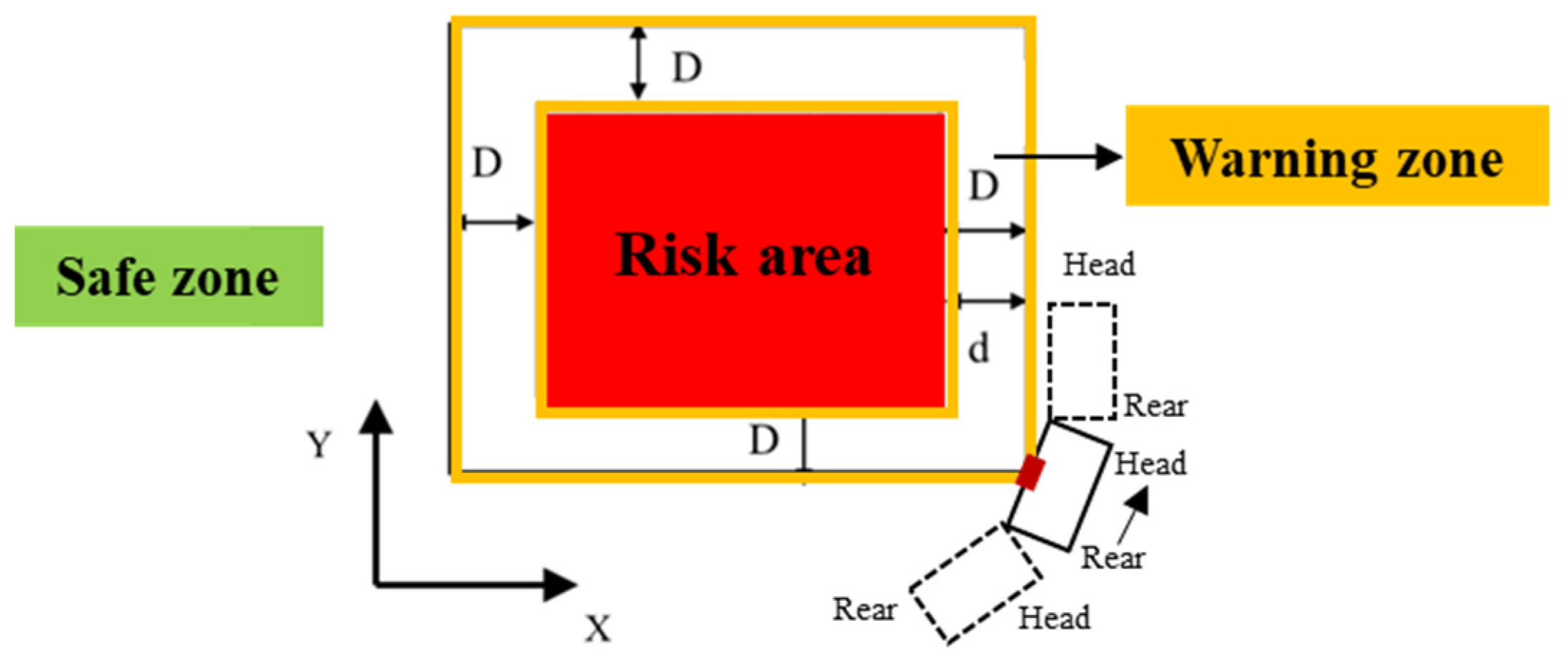
3.1.2. Classify Safety Warning States
- State 1: The head of the machine enters the warning zone
- State 2: The rear of the machine enters the warning zone
3.2. Collision Detection Method
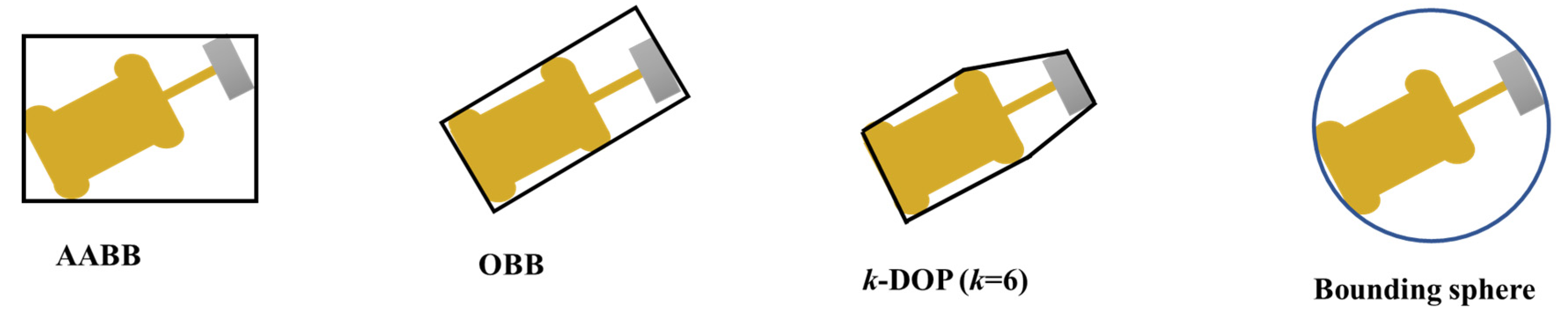
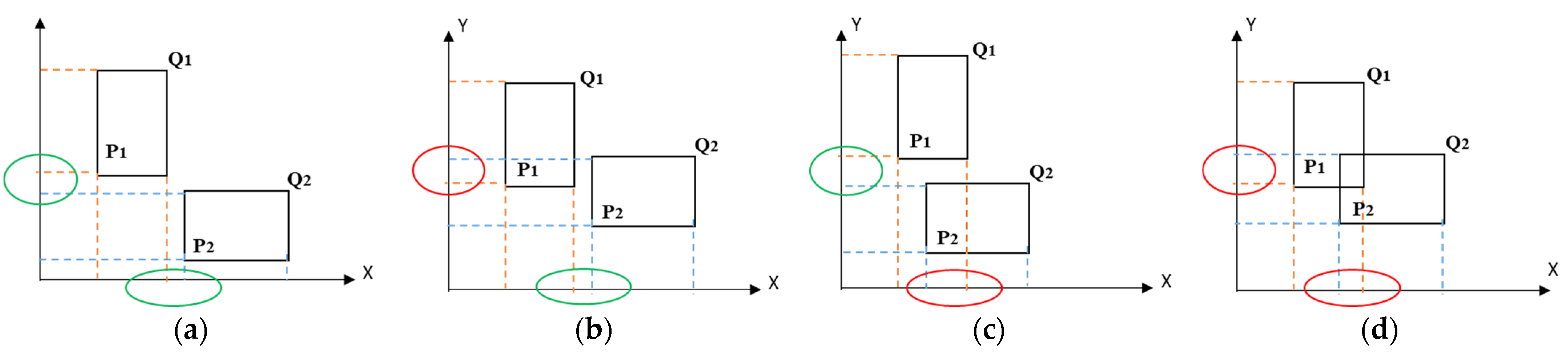
3.2.1. The Bounding Box Methods
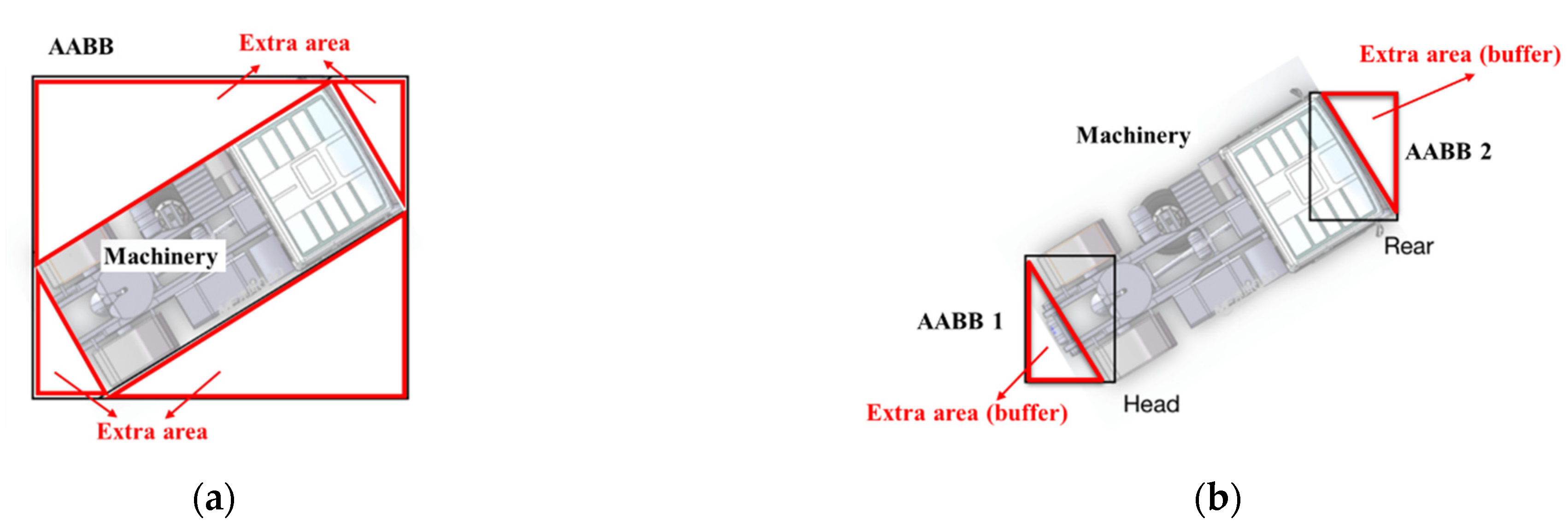
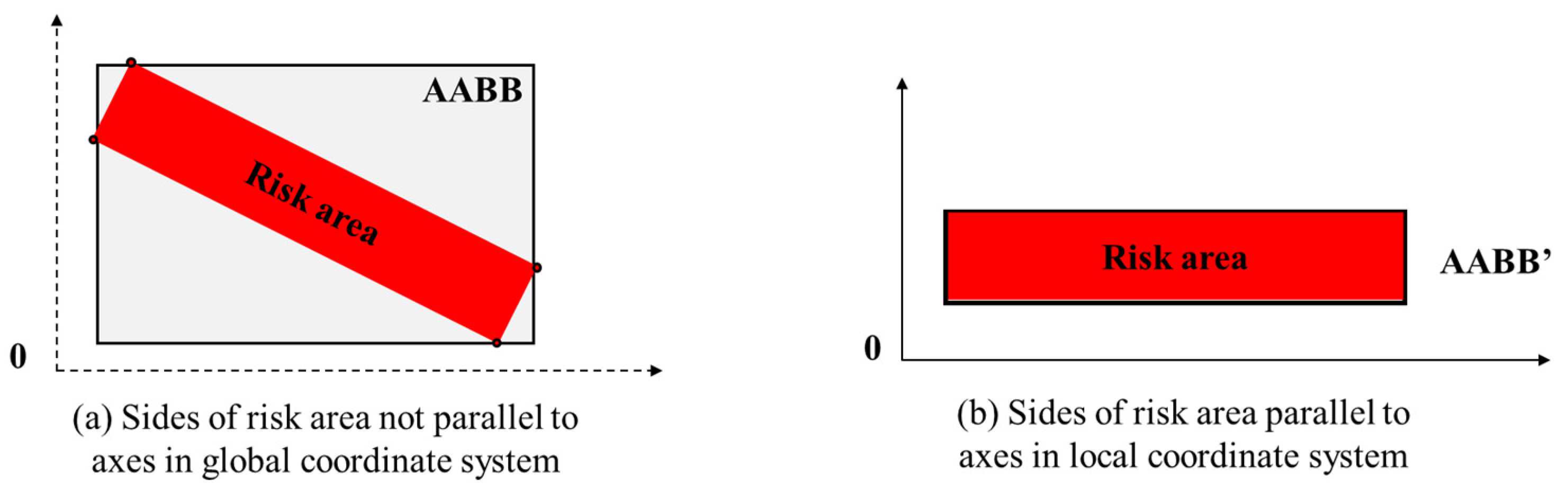
3.2.2. A Modified Bounding Box Method
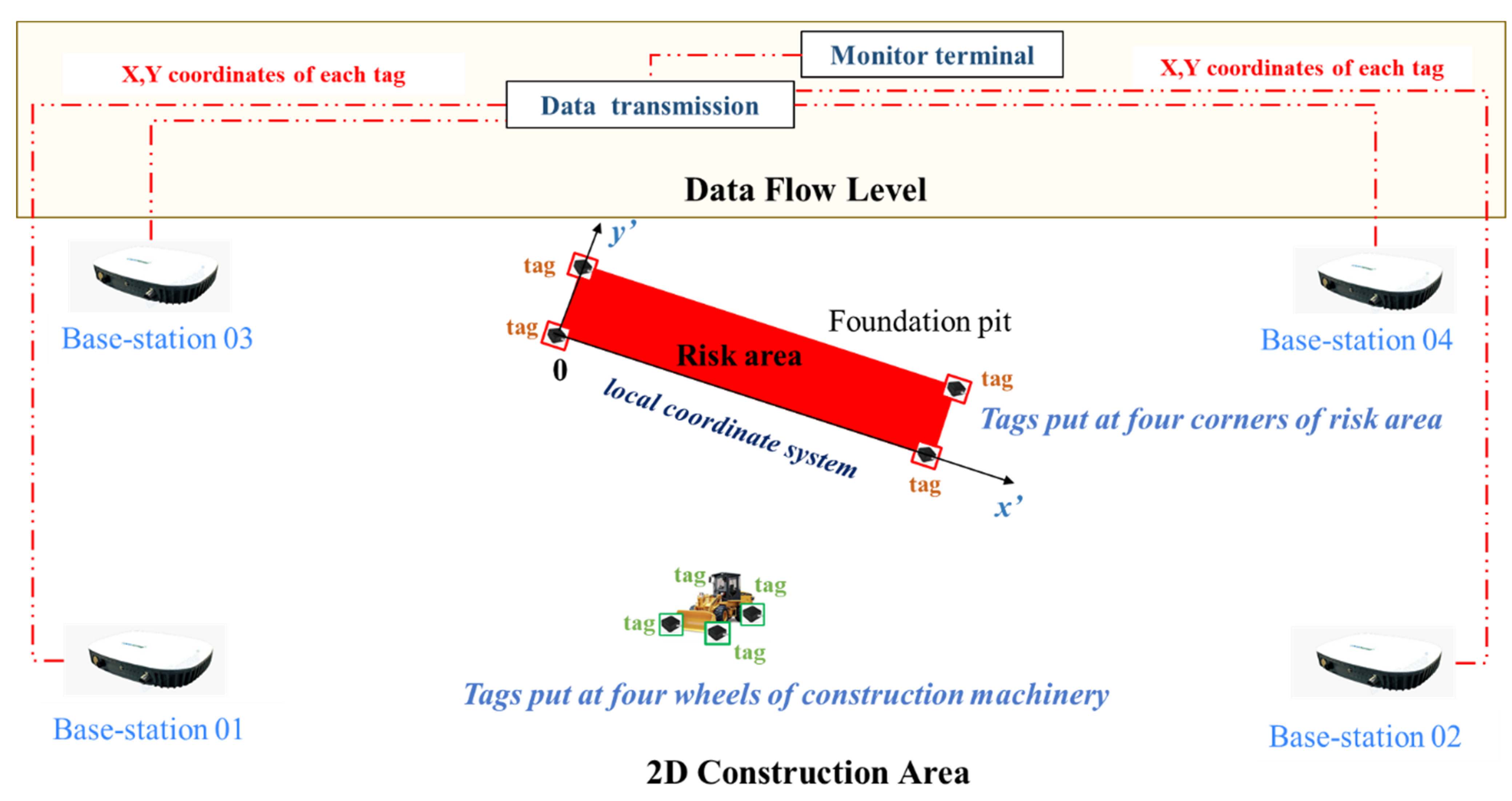
3.3. Position Data Acquisition and Coordinate System Development
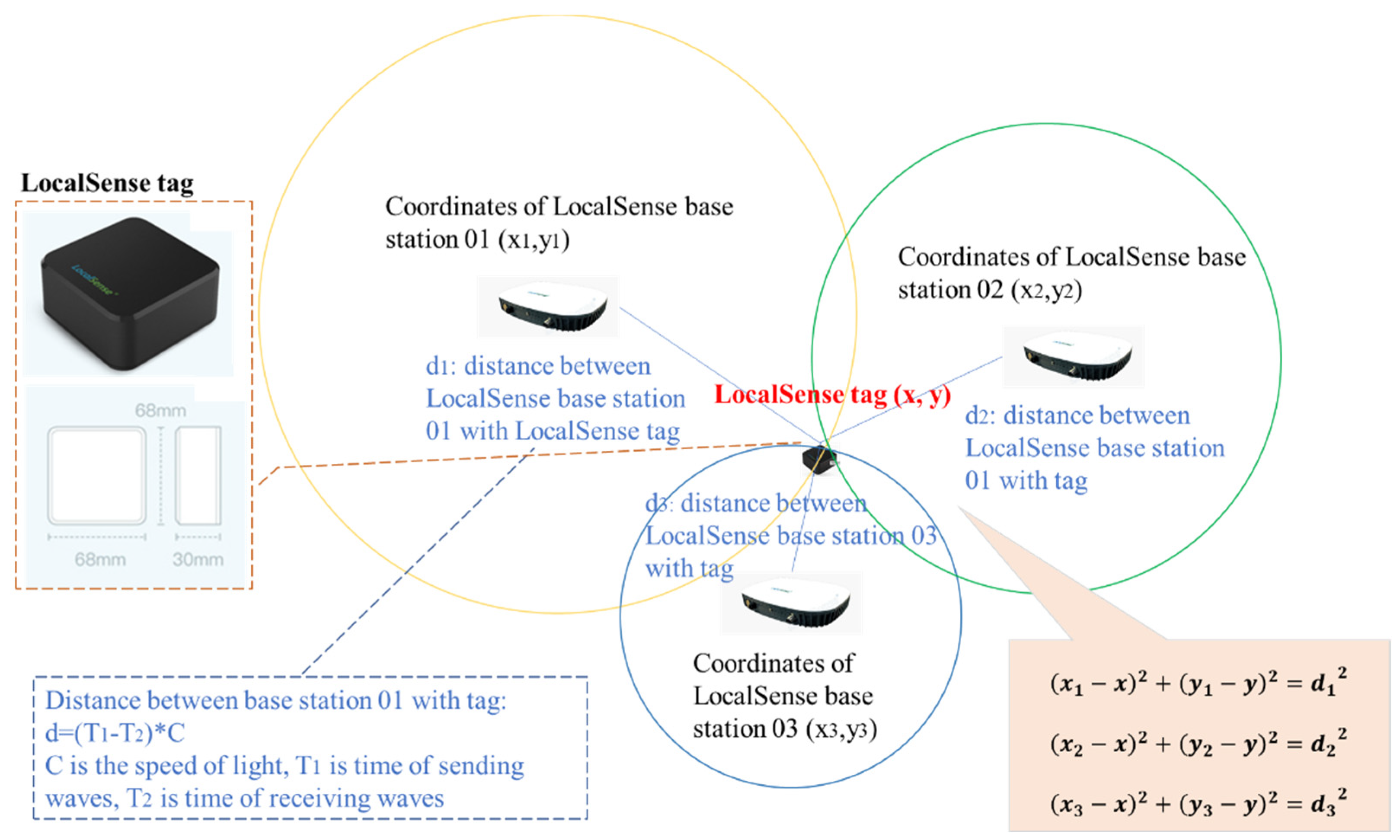
3.3.1. Position Data Acquisition
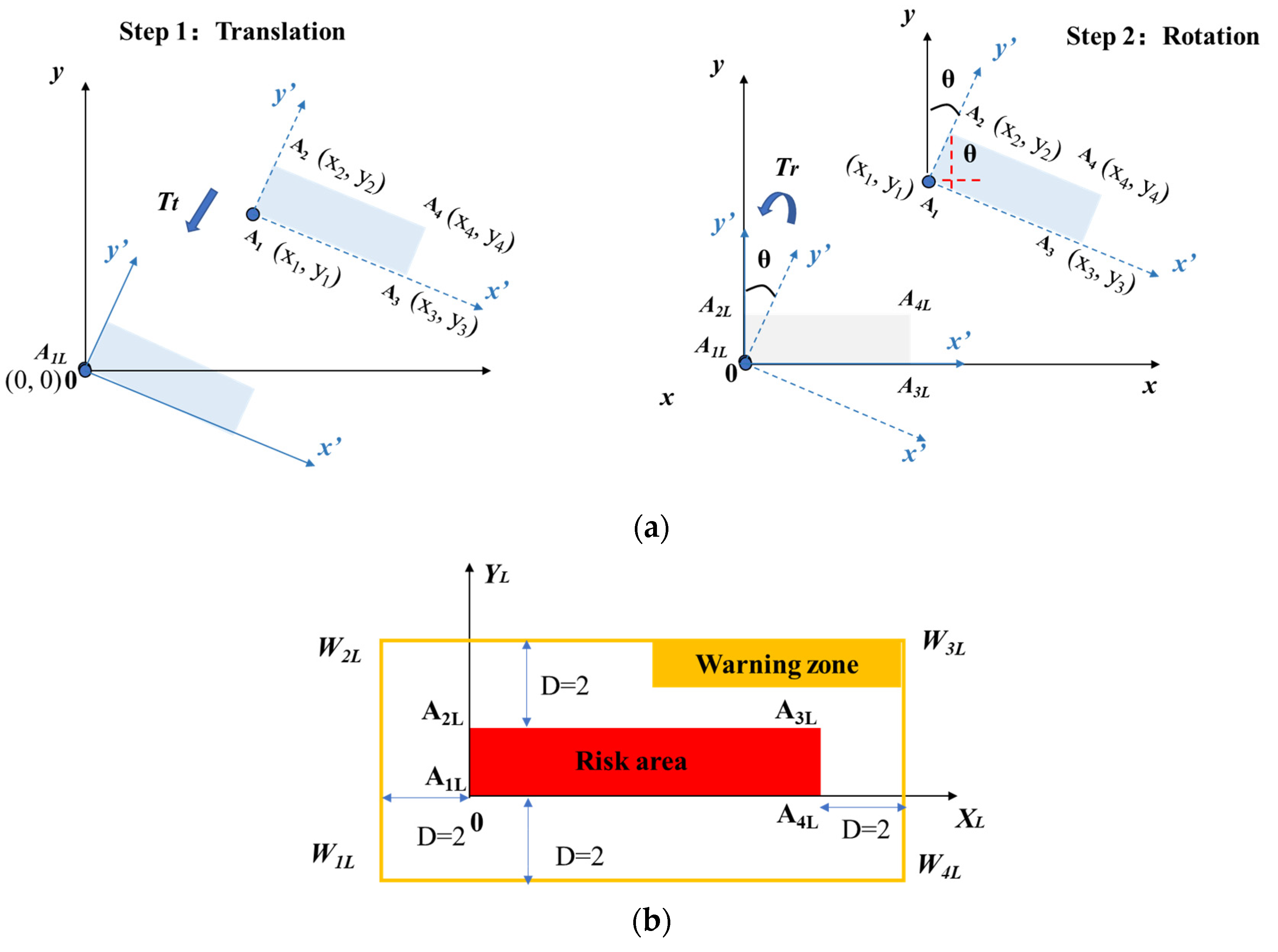
3.3.2. Coordinate System of Risk Area
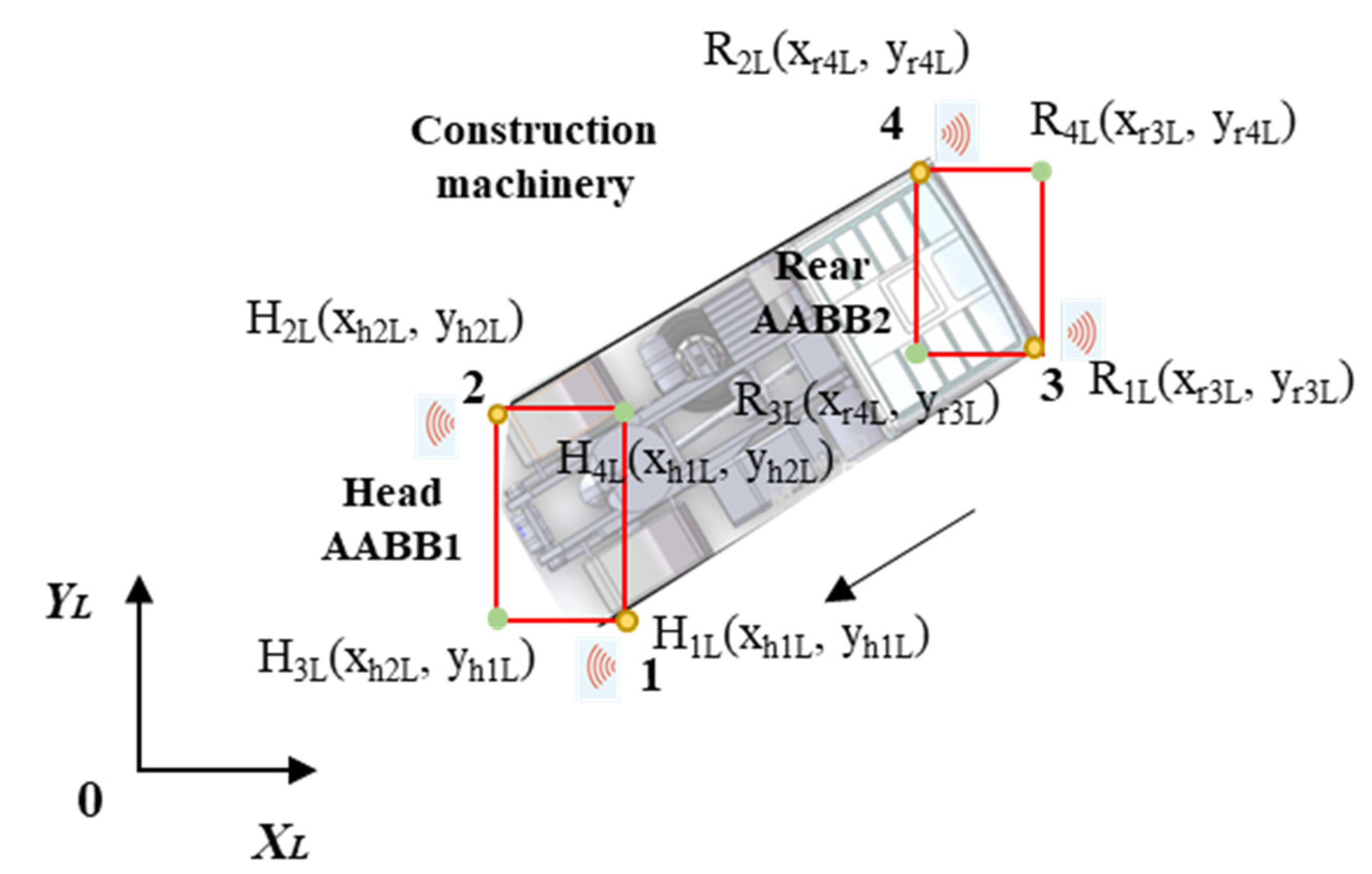
3.3.3. Coordinates of the Mobile Machinery
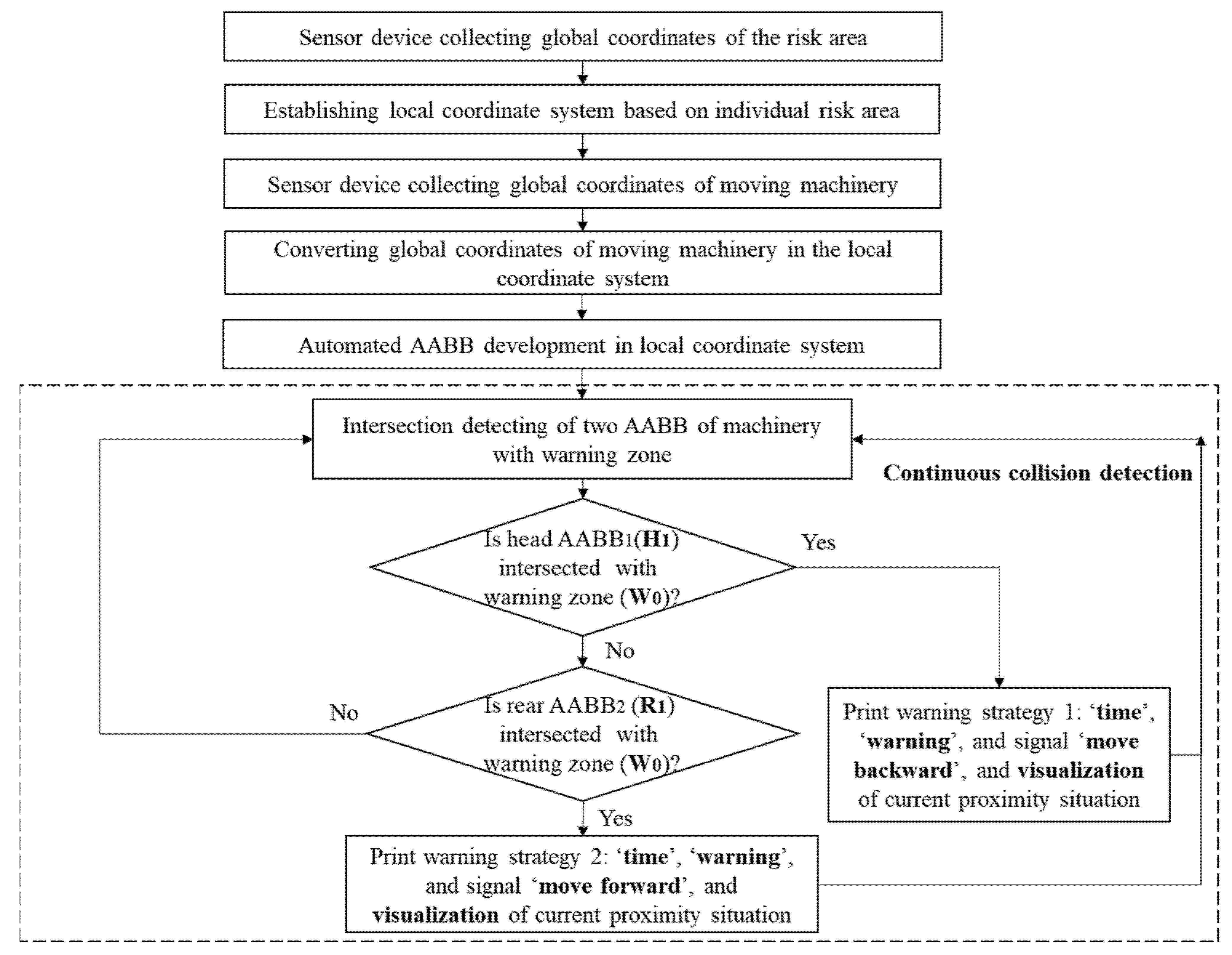
3.4. Implementation of Safety Warning Algorithm
3.4.1. Proximity Detection/Collision Warning Analysis
3.4.2. Warning Algorithm Implementation
4. Case Simulation and Validation
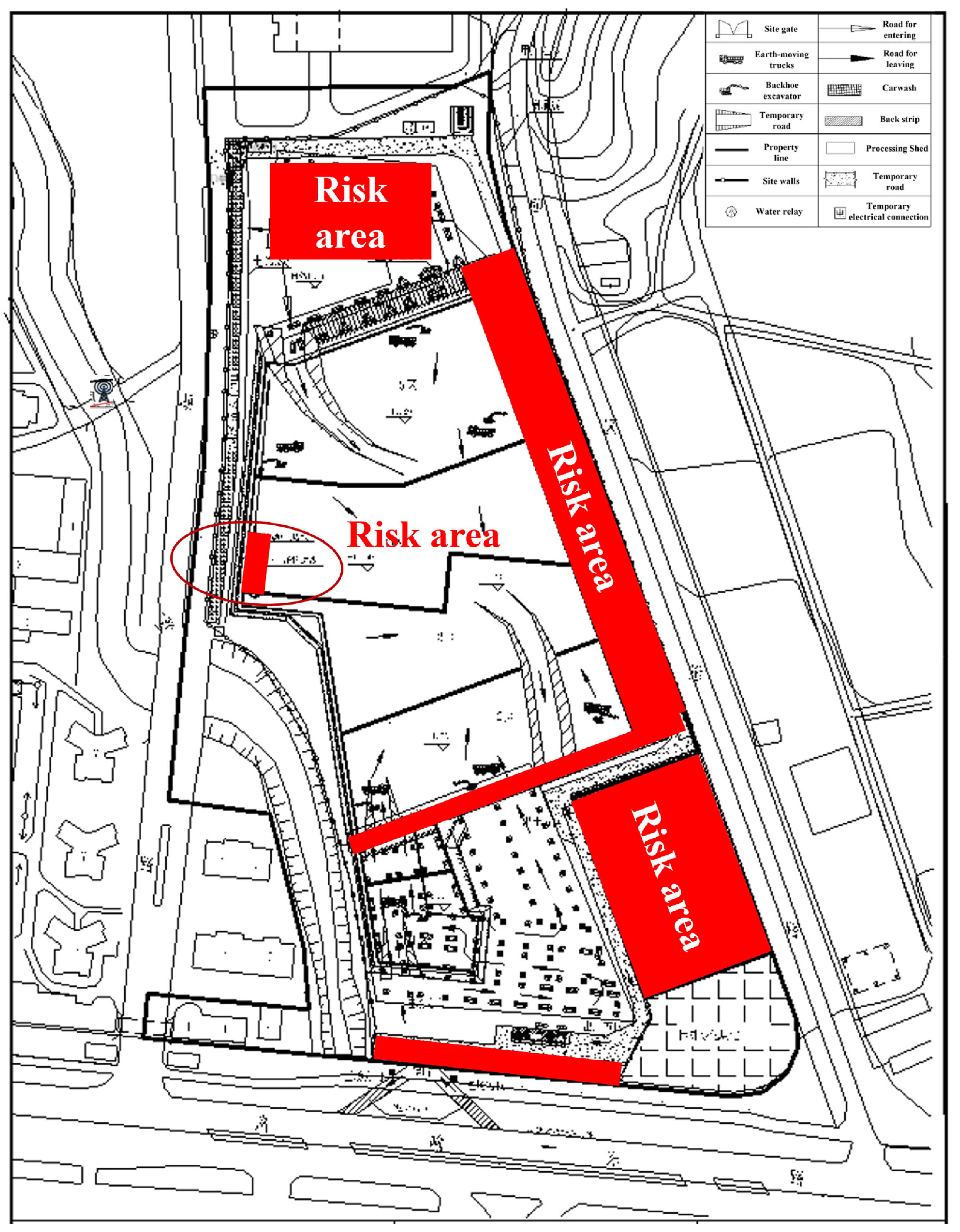
4.1. Case Background
4.2. Model Development and Collision Test Results
5. Discussions and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- General Office of the Ministry of Housing and Urban-Rural Development of China. Report of Safety Accidents from Ministry of Housing and Urban-Rural Development. Available online: http://www.mohurd.gov.cn/zlaq/cftb/zfhcxjsbcftb/ (accessed on 12 October 2021).
- General Office of the Ministry of Housing and Urban-Rural Development of China. Report on the Special Actions to Address Production Safety Accidents and Construction Safety in Housing and Municipal Projects in 2018. Available online: http://www.mohurd.gov.cn/wjfb/201903/t20190326_239913.html (accessed on 26 April 2021).
- General Office of the Ministry of Housing and Urban-Rural Development of China. Report on Production Safety Accidents in Housing and Municipal Projects in 2019. Available online: http://www.mohurd.gov.cn/wjfb/202006/t20200624_246031.html (accessed on 26 April 2021).
- Zhou, Z.; Guo, W. Applications of item response theory to measuring the safety response competency of workers in subway construction projects. Saf. Sci. 2020, 127, 104704. [Google Scholar] [CrossRef]
- Kim, H.; Kim, H.; Hong, Y.W.; Byun, H. Detecting construction equipment using a region-based fully convolutional network and transfer learning. J. Comput. Civ. Eng. 2018, 32. [Google Scholar] [CrossRef]
- Sohu. “8·16” Crane Overturn Accident of China Communications Road and Bridge Construction Co., Ltd. Available online: https://www.sohu.com/a/291842734_683111 (accessed on 26 April 2021).
- Chongqing Municipal People’s Government in China. Investigation Report of “1·19” General Vehicle Injury Accident of Chongqing Lanwen Construction Labor Co., Ltd. Available online: http://www.ddk.gov.cn/bm/qyjj/zwxx_56897/dt_56898/202006/t20200601_7528796.html (accessed on 19 April 2021).
- Ferrone, C.W.; Przybyla, J.A.; Orseske, M.T. Visibility Analysis of Vehicles and Mobile Equipment: A Design and Forensic Method. In Proceedings of the 2008 ASME International Mechanical Engineering Congress and Exposition, IMECE 2008, Boston, MA, USA, 31 October–6 November 2008; pp. 17–24. [Google Scholar]
- Wu, J.; Peng, L.; Li, J.; Zhou, X.; Zhong, J.; Wang, C.; Sun, J. Rapid safety monitoring and analysis of foundation pit construction using unmanned aerial vehicle images. Autom. Constr. 2021, 128, 103706. [Google Scholar] [CrossRef]
- Jiangxi News in China. A Overturning Accident Occurred at a Construction Site in Yuan Zhou District, Yichun. Available online: http://jiangxi.jxnews.com.cn/system/2011/03/11/011606923.shtml?COLLCC=656549940&COLLCC=1948395572&COLLCC=253896756&COLLCC=589441076&COLLCC=1547992025&COLLCC=1413774297&COLLCC=1128561625&COLLCC=1363442649&COLLCC=1162116057& (accessed on 10 April 2021).
- Technology Modern. Amazing Heavy Dangerous Machines Stuck Equipment Technology, Latest Extreme Construction Machinery. Available online: https://www.youtube.com/watch?v=Ngpkndyyd0Y (accessed on 11 April 2021).
- Wang, M.; Sun, J.; Du, H.; Wang, C. Relations between safety climate, awareness, and behavior in the chinese construction industry: A hierarchical linear investigation. Adv. Civ. Eng. 2018, 2018, 6580375. [Google Scholar] [CrossRef] [Green Version]
- Boadu, E.F.; Wang, C.C.; Sunindijo, R.Y. Characteristics of the Construction Industry in Developing Countries and Its Implications for Health and Safety: An Exploratory Study in Ghana. Int. J. Environ. Res. Public Health 2020, 17, 4110. [Google Scholar] [CrossRef]
- Boadu, E.F.; Sunindijo, R.Y.; Wang, C.C. Health and Safety Consideration in the Procurement of Public Construction Projects in Ghana. Buildings 2021, 11, 128. [Google Scholar] [CrossRef]
- Boadu, E.F.; Wang, C.C.; Sunindijo, R.Y. Challenges for Occupational Health and Safety Enforcement in the Construction Industry in Ghana. Constr. Econ. Build. 2021, 21. [Google Scholar] [CrossRef]
- Low, B.K.L.; Man, S.S.; Chan, A.H.S.; Alabdulkarim, S. Construction Worker Risk-Taking Behavior Model with Individual and Organizational Factors. Int. J. Environ. Res. Public Health 2019, 16, 1335. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Luo, H.; Yang, F. Influences of Migrant Construction Workers’ Environmental Risk Perception on Their Physical and Mental Health: Evidence from China. Int. J. Environ. Res. Public Health 2020, 17, 7424. [Google Scholar] [CrossRef]
- Wang, M.; Wang, C.C.; Sepasgozar, S.; Zlatanova, S. A Systematic Review of Digital Technology Adoption in Off-Site Construction: Current Status and Future Direction towards Industry 4.0. Buildings 2020, 10, 204. [Google Scholar] [CrossRef]
- Wong, T.K.M.; Man, S.S.; Chan, A.H.S. Exploring the acceptance of PPE by construction workers: An extension of the technology acceptance model with safety management practices and safety consciousness. Saf. Sci. 2021, 139, 105239. [Google Scholar] [CrossRef]
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance test of wireless technologies for personnel and equipment proximity sensing in work zones. J. Constr. Eng. Manag. 2016, 142, 04015049. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, B.; Yang, Y. Research on Wireless Communication Distributed Anti-Collision About Group Tower Cranes. In Proceedings of the 2012 International Conference on Information Technology and Management Innovation, ICITMI 2012, Guangzhou, China, 10–11 November 2012; pp. 1190–1193. [Google Scholar]
- Ren, W.; Wu, Z. Real-time anticollision system for mobile cranes during lift operations. J. Comput. Civ. Eng. 2015, 29, 04014100. [Google Scholar] [CrossRef]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Arslan, M.; Cruz, C.; Roxin, A.M.; Ginhac, D. Using Spatio-Temporal Trajectories to Monitor Construction Sites for Safety Management. In Proceedings of the 9th International Conference on Information Management and Engineering, ICIME 2017, Barcelona, Spain, 9–11 October 2017; pp. 211–216. [Google Scholar]
- Arslan, M.; Cruz, C.; Ginhac, D. Semantic enrichment of spatio-temporal trajectories for worker safety on construction sites. Pers. Ubiquitous Comp. 2019, 23, 749–764. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Lu, C.; Zhang, X. The Example Analyses of Common Collapse Problems in Deep Excavation and Emergency Treatments. In Proceedings of the 18th Kerulien International Conference on Geology: Geological Engineering and Mining Exploration in Central Asia, KICG 2013, Shijiazhuang, China, 20–23 September 2013; pp. 696–699. [Google Scholar]
- Zhang, X.; Wang, M.; Zhou, B.; Wang, X. Influence of factors on collapse risk of loess tunnel: A multi-index assessment model. J. Eng. Des. Technol. 2018, 16, 734–749. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Feng, B.; Xiao, J.; Zhang, Q.; Li, L.; Liang, J. Comprehensive collapse investigation and treatment: An engineering case from qingdao expressway tunnel. J. Clean Prod. 2020, 270, 121879. [Google Scholar] [CrossRef]
- Zhuang, H.; Xue, X.; Yu, X. Collapse of a deep excavated foundation pit in the soft soils by 3-d FEM. Trans. Nanjing Univ. Aero. Astro. 2019, 36, 162–174. [Google Scholar] [CrossRef]
- Edwards, D.; Parn, E.A.; Sing, M.C.P.; Thwala, W.D. Risk of excavators overturning: Determining horizontal centrifugal force when slewing freely suspended loads. Eng. Constr. Archit. Manag. 2019, 26, 479–498. [Google Scholar] [CrossRef] [Green Version]
- Mitrev, R.; Marinković, D. Numerical study of the hydraulic excavator overturning stability during performing lifting operations. Adv. Mech. Eng. 2019, 11, 1687814019841779. [Google Scholar] [CrossRef]
- Huidong, Z.; Jianhua, Q.; Minghuang, C. Simulation Analysis of Automobile Crane Safety. In Proceedings of the ACM International Conference Proceeding Series, Hong Kong, 29 December 2018–30 December 2019; pp. 320–324. [Google Scholar]
- Hermann, U.; Hendi, A.; Olearczyk, J.; Al-Hussein, M. An Integrated System to Select, Position, and Simulate Mobile Cranes for Complex Industrial Projects. In Proceedings of the Construction Research Congress 2010, Banff, AB, Canada, 8–10 May 2010; pp. 267–276. [Google Scholar]
- Li, X.P.; Gu, L.C.; Jia, J. Anti-Collision Method of Tower Crane via Ultrasonic Multi-Sensor Fusion. In Proceedings of the International Conference on Automatic Control and Artificial Intelligence, ACAI 2012, Xiamen, China, 3–5 March 2012; pp. 522–525. [Google Scholar]
- Li, X.; Chi, H.L.; Wu, P.; Shen, G.Q. Smart work packaging-enabled constraint-free path re-planning for tower crane in prefabricated products assembly process. Adv. Eng. Inform. 2020, 43, 101008. [Google Scholar] [CrossRef]
- Li, X.P.; Gu, L.C.; Kou, X.Q. Anti-Collision of Tower Crane via Ultrasonic Neural Networks. In Proceedings of the International Conference on Vehicle and Mechanical Engineering and Information Technology, VMEIT 2014, Beijing, China, 19–20 April 2014; pp. 1520–1524. [Google Scholar]
- Hwang, S. Ultra-wide band technology experiments for real-time prevention of tower crane collisions. Autom. Constr. 2012, 22, 545–553. [Google Scholar] [CrossRef]
- Wang, J. Design of a WSN-based monitoring system for avoiding collision of tower cranes. Sens. Transducers 2014, 174, 109–114. [Google Scholar]
- Jo, B.W.; Lee, Y.S.; Kim, J.H.; Kim, D.K.; Choi, P.H. Proximity warning and excavator control system for prevention of collision accidents. Sustainability 2017, 9, 1488. [Google Scholar] [CrossRef] [Green Version]
- Chae, S.; Yoshida, T. Application of RFID technology to prevention of collision accident with heavy equipment. Autom. Constr. 2010, 19, 368–37425. [Google Scholar] [CrossRef]
- Wu, C.; Wang, X.; Chen, M.; Kim, M.J. Differential received signal strength based RFID positioning for construction equipment tracking. Adv. Eng. Inform. 2019, 42, 100960. [Google Scholar] [CrossRef]
- Sepasgozaar, S.M.E.; Shirowzhan, S.; Wang, C. A scanner technology acceptance model for construction projects. Procedia Eng. 2017, 180, 1237–1246. [Google Scholar] [CrossRef]
- Sepasgozar, S.; Wang, C.; Shirowzhan, S. Challenges and Opportunities for Implementation of Laser Scanners in Building Construction. In Proceedings of the ISARC 2016 33rd International Symposium on Automation and Robotics in Construction, Auburn, AL, USA, 18–21 July 2016; pp. 742–751. [Google Scholar]
- State Council of the People’s Republic of China. The Administrative Regulations on the Work Safety of Construction Projects; State Council of the People’s Republic of China: Beijing, China, 2003.
- Ministry of Construction of People’s Republic of China. Technique Specification for Safety Operation of Construction Machinery; Ministry of Construction of People’s Republic of China: Beijing, China, 2012.
- Zhang, P.A. Machinery Safety on Construction Site; Huazhong University of Science and Technology Press: Beijing, China, 2013. [Google Scholar]
- Lai, K.C.; Kang, S.C. Collision detection strategies for virtual construction simulation. Autom. Constr. 2009, 18, 724–736. [Google Scholar] [CrossRef]
- Wang, M.; Mao, Z.; Ma, Y.; Cao, J. Stable and efficient collision detection scheme for hip-surgery training system. Clust. Comput. 2019, 22, 8769–8781. [Google Scholar] [CrossRef]
- Zhou, Y.; Suri, S. Analysis of a bounding box heuristic for object intersection. J. ACM 1999, 46, 833–857. [Google Scholar] [CrossRef]
- Jasim, A.H.A.J.; Qi, T.X.; Bao, S. Collision detection and trajectory planning for palletizing robots based OBB. Indones. J. Electr. Eng. Comput. Sci. 2016, 1, 109–118. [Google Scholar] [CrossRef]
- Klosowski, J.T.; Held, M.; Mitchell, J.S.B.; Sowizral, H.; Zikan, K. Efficient collision detection using bounding volume hierarchies of k-DOPs. IEEE Trans. Vis. Comput. Graph. Forum 2002, 4, 21–36. [Google Scholar] [CrossRef] [Green Version]
- Ding, X.J. Research on Collision Detection Algorithm Based on OBB. In Proceedings of the 2nd International Conference on Mechatronics and Control Engineering, ICMCE 2013, Beijing, China, 1–2 September 2013; pp. 936–939. [Google Scholar]
- Ullrich, T.; Funfzig, C.; Fellner, D.W.J.P.I. Two different views on collision detection. IEEE Potentials 2007, 26, 26–30. [Google Scholar] [CrossRef]
- Fang, Z.; Jiang, J.; Xu, J.; Wang, X. Efficient Collision Detection Using Bounding Volume Hierarchies of OBB-AABBs and Its Application. In Proceedings of the 2010 International Conference on Computer Design and Applications, ICCDA 2010, Qinhuangdao, China, 25–27 June 2010; pp. V5242–V5246. [Google Scholar]
- Suri, S.; Hubbard, P.M.; Hughes, J.F. Analyzing bounding boxes for object intersection. ACM Trans. Graph. 1999, 18, 257–277. [Google Scholar] [CrossRef]
- Wang, M.Q.; Zhao, W.; Qu, H.Y. An improved collision detection algorithm based on GPU. Appl. Mech. Mater. 2014, 687–691, 3893–3896. [Google Scholar] [CrossRef]
- Kanan, R.; Elhassan, O.; Bensalem, R. An IoT-based autonomous system for workers’ safety in construction sites with real-time alarming, monitoring, and positioning strategies. Autom. Constr. 2018, 88, 73–86. [Google Scholar] [CrossRef]
- Shirowzhan, S.; Sepasgozar, S.M.E.; Zaini, I.; Wang, C. An Integrated GIS and Wi-Fi Based Locating System for Improving Construction Labor Communications. In Proceedings of the 34th International Symposium on Automation and Robotics in Construction, ISARC 2017, Taipei, Taiwan, 28 June–1 July 2017; pp. 1052–1059. [Google Scholar]
- Chen, H.Y.; Lai, C.L.; Chen, H.; Kuo, L.C.; Chen, H.C.; Lin, J.S.; Fan, Y.C. LocalSense: An Infrastructure-Mediated Sensing method for Locating Appliance Usage Events in Homes. In Proceedings of the International Conference on Parallel and Distributed Systems–ICPADS, Seoul, Korea, 15–18 December 2013; pp. 587–592. [Google Scholar]
- Ali, A.M.; Abdullah, R.S.A.R.; Hashim, S.J.; Rasid, M.F.A.; Sali, A.; Ismail, A.; Hashim, F. Experimental investigation of UWB signal interference effect between UWB communication device and VSAT. J. Teknol. 2020, 82, 115–124. [Google Scholar] [CrossRef] [Green Version]
- Wen, C.-P. Formulation Control of Embankment Compaction Quality. In Proceedings of the 2007 International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–25 September 2007; pp. 5270–5272. [Google Scholar]
- Hu, Y.T.; Mu, L.; Liu, Z.L.; Du, Y.L. Application of MHB Technique in Superhighway Cement Concrete Pavement Resurfacing Projects. Appl. Mech. Mater. 2014, 587, 1043–1046. [Google Scholar] [CrossRef]
- Karumbaya, A.; Satheesh, G. Iot empowered real time environment monitoring system. Int. J. Comput. Appl. 2015, 129, 30–32. [Google Scholar] [CrossRef]
- Kodali, R.K.; Jain, V.; Bose, S.; Boppana, L. IoT Based Smart Security and Home Automation System. In Proceedings of the 2016 international conference on computing, communication and automation (ICCCA), Greater Noida, India, 29–30 April 2016; pp. 1286–1289. [Google Scholar]
- Liu, G.; Chen, X. Smart Home System Based on Embedded Control and Wireless Communication. In Proceedings of the 2020 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Vientiane, Laos, 11–12 January 2020; pp. 547–550. [Google Scholar]
- Wang, C.C.; Sepasgozar, S.M.E.; Wang, M.; Sun, J.; Ning, X. Green performance evaluation system for energy-efficiency-based planning for construction site layout. Energies 2019, 12, 4620. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Requirement of Safety Distance | Reference |
|---|---|---|
| Bulldozer | Keep away from deep ditch, foundation pit or steep slope area for at least 2 m | [45] |
| Towed scraper | Distance between two scrapers working together shall be no less than 2 m | [45] |
| The distance from edge of new embankment slope shall be no less than 1 m | [45] | |
| Wheel loader | The distance from the edge of slope, trench and pit should be more than 1.5 m when unloading | [45] |
| Concrete spreader | The distance from other equipment should not be less than 0.6 m | [45] |
| Others | Moving machinery from edge of foundation pit shall be no less than 2 m | [46] |
| Type | Computation Cost | Compactness |
|---|---|---|
| AABB | 2 | 3 |
| OBB | 4 | 2 |
| k-DOP | 3 | 1 |
| Bounding Sphere | 1 | 4 |
| Tag1_x | Tag1_y | Tag2_x | Tag2_y | Tag3_x | Tag3_y | Tag4_x | Tag4_y | |
|---|---|---|---|---|---|---|---|---|
| Data (Moving Forward) | 36.63 | 53.92 | 34.68 | 53.58 | 36.14 | 56.70 | 34.19 | 56.36 |
| 36.76 | 53.18 | 34.81 | 52.84 | 36.27 | 55.96 | 34.32 | 55.62 | |
| 36.89 | 52.45 | 34.94 | 52.10 | 36.40 | 55.22 | 34.45 | 54.88 | |
| 37.02 | 51.71 | 35.07 | 51.36 | 36.53 | 54.48 | 34.58 | 54.14 | |
| 37.15 | 50.97 | 35.20 | 50.63 | 36.66 | 53.75 | 34.71 | 53.40 | |
| 37.28 | 50.23 | 35.33 | 49.89 | 36.79 | 53.01 | 34.84 | 52.66 | |
| 37.41 | 49.49 | 35.46 | 49.15 | 36.92 | 52.27 | 34.97 | 51.93 | |
| … | … | … | … | … | … | … | … | |
| Data (Moving Bacward) | 51.74 | 48.18 | 53.02 | 46.67 | 49.58 | 46.37 | 50.86 | 44.86 |
| 51.36 | 47.86 | 52.63 | 46.35 | 49.20 | 46.05 | 50.47 | 44.53 | |
| 50.98 | 47.54 | 52.25 | 46.03 | 48.82 | 45.73 | 50.09 | 44.21 | |
| 50.59 | 47.22 | 51.87 | 45.70 | 48.43 | 45.41 | 49.71 | 43.89 | |
| 50.21 | 46.90 | 51.48 | 45.38 | 48.05 | 45.09 | 49.32 | 43.57 | |
| 49.83 | 46.58 | 51.10 | 45.06 | 47.67 | 44.77 | 48.94 | 43.25 | |
| 49.45 | 46.26 | 50.72 | 44.74 | 47.29 | 44.44 | 48.56 | 42.93 | |
| … | … | … | … | … | … | … |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.C.; Wang, M.; Sun, J.; Mojtahedi, M. A Safety Warning Algorithm Based on Axis Aligned Bounding Box Method to Prevent Onsite Accidents of Mobile Construction Machineries. Sensors 2021, 21, 7075. https://0-doi-org.brum.beds.ac.uk/10.3390/s21217075
Wang CC, Wang M, Sun J, Mojtahedi M. A Safety Warning Algorithm Based on Axis Aligned Bounding Box Method to Prevent Onsite Accidents of Mobile Construction Machineries. Sensors. 2021; 21(21):7075. https://0-doi-org.brum.beds.ac.uk/10.3390/s21217075
Chicago/Turabian StyleWang, Cynthia Changxin, Mudan Wang, Jun Sun, and Mohammad Mojtahedi. 2021. "A Safety Warning Algorithm Based on Axis Aligned Bounding Box Method to Prevent Onsite Accidents of Mobile Construction Machineries" Sensors 21, no. 21: 7075. https://0-doi-org.brum.beds.ac.uk/10.3390/s21217075