1. Introduction
The tactile sensor has recently become crucial in various technologies. One of these technologies is engineering, specifically for detecting objects and their weight under outside effects such as loads and forces. This analysis helps engineers and designers to understand how the parts fit each other and follow their performance during the testing period [
1]. The tactile pressure sensors and pressure indicating film both have advantages and constraints. This is particularly relevant when endeavoring to give accurate and significant information which relies upon the kind of physical constraints of the estimated system and required data.
Tactile sensor technology empowers to measure stresses at an enormous number of points in nearness, in this manner considering a practical normal stress distribution. The innovation was initially evolved at MIT’s Artificial Intelligent Laboratory by Hillis [
2] and Purbrick [
3], invigorated by dental application. A firm named TEKSCAN has improved the sensor and its usage for clinical and engineering applications. TEKSCAN holds proprietary and patented sensor technology [
4]. Tactile pressure sensors are used for pressure measurements, specifically dynamic pressure mapping. In addition to the software related to tactile pressure, the sensor also includes different devices for analysis, making it a significant piece of the overall pressure system. On the other hand, the negative side of utilizing tactile sensors is related to the extended setup times that are needed to guarantee that calibration has been carried out appropriately. For accurate measurements, the calibration of the sensor ought to be completed, utilizing materials that are the same as those utilized in the application. Paikowsky and Hajduk [
5] described the main application of the technology for geotechnical engineering.
Pressure measurement film is used to measure the interface pressure between two surfaces, and is the fundamental technique that shows shading, creating material with tiny microcapsules layered over a polyester material. Each color microcapsule breaks when pressure is applied. In other words, unique microcapsules crack at various pressures, and the more pressure is applied to a given area, the more capsules get broken. The slenderness of the film permits it to be utilized in a variety of applications to catch pictures of pressure profiles. Another advantage of pressure film sensor film is that no electronics are joined, which permits the film to gather pressure distribution data without worrying about wires and costly hardware. Pressure film works well to have a peak pressure between objects. It is more complicated to utilize them in different processes, such as estimating variations below peak pressure and endeavoring to comprehend the adjustment of pressure after some time. Moreover, when repeated tests are required, more pieces need to be cut and set, which takes additional time and increases the cost of materials.
Granular materials are involved in different discrete units. These materials exist in our daily life, including food (for example, sugar, salt), mechanical powders (for example, coal, glass), and chemicals materials, in addition to the soils under each construction and tunnels. Previously, the estimations of stresses acting inside or at the limit of a granular mass were assessed primarily using generally large load cells and gave a limited number of estimations. In addition, the utilization of load cells is complicated because of the interference of the estimating device with the load distributions inside the material and the measurements of results. The slender uniform structure of the tactile pressure sensors significantly diminishes the obstruction brought about by the estimating components and considers a more exact recording of the stresses in granular materials. Paikowsky and associates were the first to utilize tactile pressure sensors for geotechnical applications. Paikowsky and Hajduk [
5] reported on a complete series of sensor tests in granular media. They presumed that the tactile pressure sensor system gives typical normal stress measurements in granular soil to a decent level of exactness. Moreover, they showed that sensor estimations are delicate to load rate, creep, and hysteresis after dumping and gave test information to evaluate these impacts. They utilized these sensors for visual observation and measurement of aerial stress distribution under a rigid strip footing [
6] and vertical stress distribution beneath a pile of sand [
4]. The tactile sensor has additionally been utilized by different analyses for different applications, for example, measuring the vertical stress transmitted from railroad tracks [
7], sensing changes in the vertical stress of pipelines that are displaced along the side [
8], and the calibration of tactile pressure sensors for measuring stress in soils [
9]. Previous studies focused on stress measurements at the soil interface. The calibration of the tactile sensor has been known to be essential for estimation precision [
5]. Some other studies aimed at soil shear strength determination in the laboratory and in situ tests and highlighted particle contact as very important in soil particle breakage and strength behavior [
10,
11]. This paper presents laboratory measurements of stress in the soil surrounding the pile by using advanced technology represented in tactile sensors (Tekscan) and pressure film sensors (4 LW and 5 LW) to evaluate and calibrate the soil stress during a pile load test in laboratory conditions.
Piles transfer the vertical applied load by the interaction with the surrounding soil. Piles gain the load capacity by the skin friction and base resistance. The mechanisms of resistance mobilization of the pile’s skin and base are completely different, but both cause the stress to increase in the soil. The stress in the soil balances the force that comes from the pile until the failure criterion is reached. It is worth adding that the local failure on the pile’s skin does not mean that the pile achieved the ultimate load capacity because the base may still have the reserve of capacity. Different pile settlements are needed to induce the failure on the skin and base of the pile. Pile load capacity is usually interpreted by the ultimate base resistance and skin friction. Some of the theories allow calculating the pile load capacity based on soil properties. However, it still does not fully recognize the relationship between resistances mobilization and changing soil stress. This was the starting point of the research and the main aim of the presented paper.
Stress in the soil is transferred by grains with very small dimensions (e.g., for sand, only 0.05–2.00 mm). In this case, the contact stresses between the grains are huge and may achieve 150 MPa when the plastic strain phase is achieved [
12]. The average stress in soil and the contact stress between soil grains is presented in
Figure 1.
The distribution in the soil can be calculated with Equation (1):
where
—average stress in the cross-section, kPa;
A—area of the cross-section, m
2;
—contact stress between soil grains, kPa;
—area of soil grains contact, m
2.
The diameter of the contact area of two soil grains is described by Equation (2) [
12]:
where
—Poisson ratio;
—Young modulus, GPa,
—radius of soil grain No. 1 and No. 2, respectively, mm;
—force transferred between grains, N.
Equation (2) allows calculating the contact stress in the soil due to the average stress in a soil sample.
The contact stress is huge in comparison with the average stress, as is presented in
Figure 2. In geotechnical engineering, the contact stresses are usually neglected, but they may significantly impact the soil interaction with other materials. In combination with soil with smooth material, soil grains may cause microcavities which increase the friction conditions. In the case of steel smooth pile, the stress on the steel–soil interface equals 1 MPa, which may induce cavities with a depth of 0.09 mm, resulting in a rough surface formation and improvement of friction conditions.
Furthermore, based on
Figure 2, it can be noticed that very small average stresses can induce contact stresses which are several hundred times greater than the average value. The contact stress is very difficult to measure because of the very small interaction area. Measurement and DEM simulations of the contact soil pressure was also described in [
13,
14].
The other phenomenon of stress distribution in the soil is the stress concentration, which is developed in the form of chains of increased stress. The chains are especially visible in coarse-grained soils such as sand and gravel, and they form a network of chains of contact forces [
15,
16].
Generally, in geotechnical engineering, soil stresses are not considered stresses between particles but rather at a bigger scale than the average stress in the analyzed area, as in research presented in [
7,
9,
17,
18].
2. Materials and Methods
Stress in soil depends on the forces distributed by the particles. Any sensor which is placed in the soil to measure the pressure changes the conditions of force distribution; thus, the sensor should be small, thin, and flexible, and should deform together with the soil without any obstacles. A wide range of sensors is used in geotechnical engineering; among them are tactile and color film pressure sensors [
19].
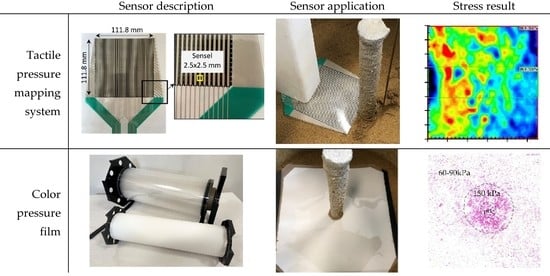
In this paper, two kinds of sensors are presented which were used to measure contact stresses. First is the tactile pressure sensor, which has 1936 measuring points and allows measuring interface pressure changes. Second is the pressure color film, which can precisely measure pressure distribution and record the pressure peak during the test. Both were used in laboratory tests to investigate the stress changes in the soil surrounding the loaded pile.
2.1. Tactile Pressure Sensor
The tactile pressure sensor used in the laboratory test consists of two polymeric sheets with pressure-sensitive semiconductive ink printed on each sheet. Typically, the ink is imprinted on lines on one sheet and in columns on the other. At the point when the two sheets are squeezed together, a framework of sensing areas is shaped. The active area for measuring was equal to 0.0125 m
2 (dimensions: 111.8 × 111.8 mm) and thickness was only 0.102 mm. The cross of rows and columns on the sensing area is called a sensel. From one sensel, information about the normal force and the localization was gained. The sensor has 1936 sensels, distributed over an area equal to 6.25 mm
2. The large density of sensels allows measuring the pressure distribution with good accuracy. The photo and scheme of the sensor are presented in
Figure 3. Two ranges of tactile sensors were used: 0–41 kPa and 0–345 kPa [
20].
2.2. Pressure Color Film Sensor
The pressure color film can be characterized as a pressure demonstrating sensor film that might be utilized to uncover the distribution and magnitude of pressure between any two contacting or impacting surfaces. This sensor can easily measure pressure equilibrium and distribution on any size. The sensor consists of two sheets: the first is a polyester base with a micro-encapsulated color-forming layer, and the second is a polyester base with a color-developing layer. Connecting the two layers activates the sensor. After the sensor is placed between two compressed surfaces, the microcapsules are broken and react with a color-developing agent [
21]. During the test, the maximum pressure is recorded by the intensity of the color. The film sensor can be cut into various shapes from rolls with 320 mm.
In the laboratory test, two kinds of pressure were used, Ultra Extreme Low Pressure (5 LW), with a pressure range of 6–50 kPa, and Extreme Low Pressure (4 LW), with a pressure range of 50–200 kPa. The thickness of the two-sheet sensor is only 0.2 mm. The photo and scheme of the measuring method are presented in
Figure 4.
The advantage of using the sensor is the ability to cut any shape, its small size, its flexibility, and no accompanying equipment such as cables and data loggers. The above features allow measuring pressures in hard-to-reach places such as the soil surrounding the pile, aimed in this paper and other applications [
22].
2.3. Instrumented Model Piles
Piles transfer the applied load into the soil by the skin friction and base resistance. Foundations piles in engineering practice have the diameter and length usually in the range of 0.2 m–1.5 m and 5 m–30 m, respectively. Due to the layered soil and strong diversity of soil parameters, it is hard to analyze the stress in the soil on a real scale. Therefore, the small scale of piles is used in the presented research. Laboratory conditions allow to maintain the high repeatability of results and simplify the analysis. Therefore, model tests are still valuable [
23]. In laboratory research, three model foundation piles were used. The piles have different geometry and surfaces, as is presented in
Table 1.
Two different surfaces allow distinguishing two different schemes of failure. The rough surface makes sufficient connections with soil grains, so the failure occurs far from the pile skin. A smooth pile surface weakens the pile–soil interface connection. Earlier failure due to insufficient roughness can lead to failure before the increase in stress in the soil due to dilatation may occur described in point 2.4. This paper used the roughness description qualitatively rather than quantitatively to distinguish only the different phenomena described above and presented in
Figure 5b.
Piles were instrumented in strain gauge force sensors in the head and at the base of the pile as is presented in
Figure 5a. The range of a measured force is 0–10 kN, and accuracy is 0.01 kN. Optoelectronic encoder sensors were used with a range of 0–50 mm and an accuracy of 0.005 mm to measure the pile displacement.
2.4. Soil
The soil used in a laboratory test is medium sand with grain uniformity index equals 3.04, while the minimum and maximum soil porosity index are equal to 0.452 and 0.776, respectively. Medium sand has less than 4.35% silt and clay fraction and no gravel, cobbles, and boulders fraction. The maximum grains are 2 mm, and the substitute aggregate of grains together with the smaller one account for 50% is equal to 0.3 mm.
The strength of soil was tested in a shear box due to the ISO [
24] standard requirements. The soil was tested in four normal stresses, i.e., 50, 100, 200, and 400 kPa, and in two different initial densities, i.e., loose and dense, due to the requirements [
25] presented in
Figure 6.
Figure 6a presents the relationship between the shearing stress and horizontal displacement of the upper part of the shear box. Dense and loose soil is described by the continuous and dashed lines, respectively. In dense soil shearing tests, the peaks of stresses are observed, which are more prominent than in a loose state. After the peak, the stress in dense soil decreased to achieve the critical shear stress close to the stress achieved in shear tests of loose soil. This phenomenon is known as the hardening and softening behavior of soil, and it was also observed in field conditions [
26]. The failure points refer to the maximum shearing resistances, which are achieved in different displacements. The higher the normal stress in soil, the greater horizontal displacement needed to cause the failure—the results in
Figure 6b present dilation and contraction during shearing. The initial contraction was observed in loose and dense soil, but greater values were in a loose state.
Additionally, the failure points refer to the centers of the straight range of dilation. These relationships may have a significant influence on stress forming in the main part of the research: pile load test with flexible sensors. In the direct shear test, the normal stresses were maintained constant, but in the pile load test, the surrounding soil is partially blocked by the other soil particles. The dilations observed before the maximum shearing resistance may cause an increase in the normal stress in natural conditions and increase the strength of the soil.
4. Laboratory Pile Load Tests
In the laboratory investigation, the instrumented piles were used to transfer the vertical load to the soil. Both sensor and pile were placed during soil compaction. Sensors were placed in different localizations, as is described in
Table 2 and
Figure 16 and
Figure 17.
Piles were loaded in assumed load steps by a hydraulic cylinder. In each step of the test, when the constant force was maintained, the settlement, base resistance, and pressure outcomes in the case of the tactile sensor using were measured. The measured values were recorded at a frequency of 1 Hz. The soil response to the force that comes from the pile was not immediate because of the elastoplastic behavior of soil, which was especially visible in the force close to the ultimate pile load capacity. Thus, the next load step took place after the settlement stabilizes off, and the requirement of stabilization 0.02 mm/min was met. After every test, the soil was excavated, and sensors and piles were carefully taken out. The color film sensors were then scanned to be analyzed using computer graphics software.
The duration of one test was roughly equal to 50–90 min, which in terms of the amount of data gives 6–10 million outcomes for tactile sensors and 3–5 thousand outcomes for force and settlement sensors. The number of outcomes from color film depends on the scan resolution, equal to 600 dpi in this research.
Sensors were placed in the soil at different localizations, as is presented in
Figure 16 and
Figure 17.
Sensors were placed in the soil at the localizations presented in
Figure 16 and
Figure 17.
Figure 16a,b show the tactile sensor with a rough and smooth pile placed at half of the pile depth and at the pile depth level, respectively. Sensor touched the pile skin at one edge. The data acquisition handle needed to be installed close to the sensor. Therefore, an additional cover should be installed to protect the handle from the soil.
Figure 16c,d present the color film censor placed in vertical and horizontal directions, respectively. The soil was carefully placed on the sensor and between sensor and pile, and was then compacted after achieving the required thickness of the layer.
Obtaining the natural state of relative density without influencing initial reading created many difficulties, especially for low pressures. The 5 LW color film sensor is very sensitive, and any touch may cause unintentional measurements. It was the reason to check the compaction influence on the initial reading. After obtaining the results of these preliminary tests of compaction influence, we used only the 4 LW color film sensor, which has a range of measurement beyond the compaction influence, as is presented in
Figure 13. However, the 5 LW color film sensors helped prove the compaction influence. The higher ranges of pressures in soil should increase the precision of measurements because it allows neglecting the initial stress caused by the compaction process and causes a better soil–sensor connection.
5. Results
The applied load N2, skin friction T, base resistance N1, pile settlement s, and the pressure maps from the tactile sensor were recorded during each test at a frequency of 1 Hz t. Pile response as the settlement to the applied load was initially linear, but every next stage causes an increase in the increments of settlement versus the applied load. This relationship is commonly known as the pile settlement curve. The ultimate pile load capacity refers to the applied load that goes to the asymptote. This asymptote sets out the pile load capacity, which is impossible to exceed because the pile settlement should achieve infinity from a mathematical point of view. Both slips of soil on the pile skin and failure in the soil below the pile base occur in the above situation.
Figure 18 shows the relationship between the vertical stress measured by the tactile sensors placed in two different localizations and the resistances or applied load. Stress in the soil presented in
Figure 18a increases approximately linearly from the initial geostatic stress to the maximum stress refers to the failure of pile skin friction. This does not mean that the pile had reached the ultimate capacity, but it does mean that the further increases did not change soil stresses. It indicates that stress changing at the level of half of the pile depth was caused only by the friction between the pile skin and surrounding soil. Moreover, it can also be noticed that increasing stress did not go hand in hand with skin friction mobilizing at the beginning of the diagram in
Figure 18. This could be caused by the contraction phenomena described in point 2.4. After that, the stress increasing before shearing was caused by the dilation phenomena.
A different relationship was observed at the level of the pile base, where after achieving the maximum skin friction, the vertical stress in the soil still increased. This indicates that the increase was caused by the base of the pile, which was still far from a limit resistance.
The influence of the base resistance on the stress at the level of half pile depth is also shown in
Figure 18c, where stress stabilization is observed. This phenomenon was not observed in
Figure 18d because the stress in the soil and base resistance relationship is approximately linear.
Figure 19 shows the results from color pressure films placed horizontally in the soil at three different levels. The stresses presented in
Figure 19a,b were too small to gain valuable outcomes because the tactile sensor’s stress measured in the previous investigation was less than 30 kPa. In contrast, the color pressure film 4 LW can measure the values in the range 50–200 kPa. Nevertheless, the result presented in
Figure 19c is satisfactory because it shows the stresses distributed in circular shape with roughly a three times greater diameter than the pile one.
In the test P5.R.CFS presented in
Figure 20, the color film sensor 4 LW was placed vertically around the pile to measure horizontal stresses in soil. From this test, only the stresses below the pile base can be further analyzed because the horizontal stresses around the pile skin were out of the 4 LW color film range (50–200 kPa).
Figure 20a presents the concentration of stresses 50 mm below the pile base. The value of the stresses are compared and presented in
Figure 19c. The zone of high stresses below the pile base has a circular shape with a diameter of approximately 100 mm, so it is roughly three times the pile diameter. It confirms the soil behavior below the pile base investigated in the research of the soil displacements near the pile base [
31].
Figure 21 and
Figure 22 show the pressure maps placed at half of the pile depth and at the pile depth level, respectively. Piles touched the maps in the middle of the left edge in every map. Every map is presented for the chosen step of the pile load with the average pressure in the soil.
In the tests of P1.R.0.5H.TS and P3.S.0.5H.TS, where the tactile sensors were used for a rough and smooth pile, respectively, the maximum value of stress in soil occurred close to the pile skin and reduced due to the distance from pile skin. It is worth adding that the stress distribution for both rough and smooth piles presented in
Figure 21a,b,d,e were initially comparable, as is presented widely in
Figure 22. The sufficient friction can explain this in the interface between soil and pile skin in rough and smooth piles. Slipping the soil on the smooth pile in test P3.S.0.5H.TS caused the stress to reach a stable level finally. In contrast, the rough pile in test P1.R.0.5H.TS still had sufficient roughness to cause the further increase of stresses in the soil, as is presented in
Figure 21c.
The pressure maps obtained in test P2.R.H.TS and P4.S.H.TS show that the stress concentration occurred not close to the pile, as in the case of test P1.R.0.5H.TS and P3.S.0.5H.TS, but in the space roughly equal 20 mm for pile base, as is presented in
Figure 22. The results of both smooth and rough piles are very comparable to each other. The stresses at the base level reached greater values than the stresses at the level of half pile depth. Furthermore, the stresses near the pile base were reduced almost to zero when the applied load was close to the pile capacity, and a large pile settlement was observed. This reduction, presented in
Figure 22f, might cause the degradation of friction conduction on pile skin close to the pile base. The stress reduction was more pronounced in the case of the smooth pile than in the rough pile. At high loads on the pile, the base of the pile still caused increasing vertical stresses, but only in the rough pile could it cause additional friction due to the increase in stresses.
Figure 23 and
Figure 24 show the stress distribution in the surrounding soil due to the distance from the pile obtained based on the pressure maps. The stress in the soil surrounding the pile skin at the level of half pile depth reduces from a maximum value near the pile skin (3 mm) to geostatic stresses (6 kPa) in the distance equal to 60 mm, as presented in
Figure 23. Stresses distribution of both smooth and rough piles in case of small loads were similar (
Figure 23a,b), but the main difference can be noticed in
Figure 23c, where only the rough pile still caused the stress to increase.
Stresses at a deeper level, presented in
Figure 24, achieve greater values, and the stress distribution required more area to achieve geostatic pressure. It was out of the range of measurement during the test because of the dimensions of the tactile sensor (111 × 111 mm). Moreover, it can also be noticed that stress distribution at the pile depth level did not depend on the roughness of the pile skin.
6. Discussion
The results described in this paper indicate that stress mobilization in the soil at the pile depth level depends on the pile’s skin resistance in small loads when the slippage of soil on the pile skin had not yet occurred. After the maximum skin friction was achieved, only the stress at the level of pile depth increased. This increase might only be caused by the base of the pile that had not achieved the limit value. The stress increasing in the soil, which was caused by the pile skin resistance, could not only be caused by the dilatancy phenomena because stress increasing due to this process would be insufficient. It proves that the surrounding soil stresses that come from the pile skin and base resistance are interdependent, especially in the surrounding soil near the base of the pile. This phenomenon is usually neglected in pile load capacity analyzes because it is common to assume the skin and base resistance as independent components of pile load capacity. The pile base might increase the stress in the soil above the level of the pile base and cause additional skin resistance when the failure of skin friction does not occur. This positive relationship was observed in the rough pile. In the case of smooth pile skin, a large settlement of base caused the stress reduction in the soil close to the base of the pile, and thus, it reduced the skin friction.
In the present paper, two kinds of sensors were used, i.e., color film pressure and tactile sensors. Color film sensor 5 LW with a range of measuring of 6–41 kPa turned out to be too sensitive to measure the stress in soil, despite the laboratory conditions. A soft touch already caused a reading on the sensor, so it was hard to obtain valuable measurements. The stresses obtained in other sensors were promising and gained information about soil behavior during the pile load test, which is usually analyzed by the load-settlement curves [
32,
33]. This kind of sensor allows obtaining pressure maps that prevent skipping some areas in proper stress analysis and deeper investigation of pile–soil interaction.
The results presented in this paper proved that the tactile sensor used in this research could be successfully used to measure stress distribution in the soil in laboratory conditions or the case of small pile dimensions, for example, 3D printed concrete pile investigations [
34].





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}