1. Introduction
State estimation is a challenging problem in the field of robotics that has been significantly explored in the recent years and in different scientific and technological oriented communities, such as: robotics [
1], aerospace [
2], automatic control [
3], artificial intelligence [
4], and computer vision [
5]. In this framework, one of the most interesting problems is the one that is related to the estimation of the pose of a robot, especially for the case that multi-sensors are utilized for the pose determination problem, with related sensor fusion schemes, in order to increase the overall accuracy of the estimation but also at the same time introduce the proper resiliency.
Towards this direction, lately the research on sensor fusion has been evolving in a rapid manner, since multi-sensor fusion has the ability to integrate or to combine data streams from different sources and simultaneously to increase the quality of the measurements, while decreasing the corrupting noise from the measurements. Thus, in the multi-sensorial fusion architectures, such for example the case of the pose estimation, it is very common to have multiple sensors that are providing, e.g., full pose state estimations or partial pose estimations (translation or orientation) and to have an overall sensor fusion scheme that is commonly realized in a centralized [
6] or distributed approaches [
6,
7]. In centralized fusion architectures, a central node or a single node is utilized, where direct measurement data or raw data from multiple sensors are used to fuse using several type of Kalman filters, depending upon the system whether it is linear or nonlinear. In this context, the Extended Kalman Filter (EKF) has taken considerable attention in numerous research works involving the case of multi-sensor fusion, while utilizing real data from sensors for localization of ground robots and Micro Aerial Vehicle (MAV) [
8,
9,
10,
11]. However, the EKF based fusion algorithms involve local linearization of the system. In order to explicitly account for the nonlinearities, involved in the dynamical model, few progressive approaches consider the Unscented Kalman Filter (UKF) [
12,
13] and the Particle Filter (PF) [
14] based multi-sensor fusion for robotic localization. Even though the UKF and PF are superior for addressing nonlinearities, the advantage comes with additional complexity in the computational burden. Comparison studies reported in [
15,
16] demonstrated that for robot localization, the performance of EKF is comparable in all practical purposes. Apart from the conventional Kalman based approaches, various innovative numerical optimization based multi-sensor fusion algorithms, such as moving horizon estimation [
17,
18], set membership function [
19], graph optimization [
20], while MAV localization in GPS denied environment have recently been investigated in [
19,
21]. The numerical optimization based estimation framework has the capability to incorporate the non-linearity of the dynamical model, as well as various physical constraints. However, it imposes additional computation complexity and limitations due to the theoretical guarantee on convergence properties.
In general, a centralized structure with multi inputs and outputs works very well for data fusion. Though it is not sufficient for all the cases, sometimes one of the sensor can fail suddenly for a certain period of time in total operating duration, in such a situation, the centralized approach follows the faulty sensor’s data, while having the disadvantage that it can not detect or eliminate the fault occurred by the sensors. Although it is possible to attain an almost optimal solution in the centralized fusion framework, in real and field utilizations, processing all the sensors at a node or a point is most likely ineffective and has the potential to lead into direct failures in case of a sensor defects or temporary performance degradation. On the other hand, the distributed fusion [
22] typically consists of at least two layers, where in the first layer, the raw data are collected from different sensor measurement units to create the local estimates and in the sequel are being forwarded to the second layer for further fusion from the corresponding nodes. Typically, in the first layer a Kalman filter is utilized to provide the local estimates from the sensors [
23]. However, depending on the data assimilation procedures, in the second layer various decentralized fusion methods have been investigated [
24]. In this direction, an information filter based decentralized fusion [
22] is considered for the localization of mobile robots and MAVs in [
24,
25]. However, these formulations do not explicitly incorporates the correlation between local estimates. Contemplating the dependency of the local nodes, various covariance intersection based decentralize fusion algorithms for collaborative localization have been investigated in [
26,
27,
28,
29,
30]. In this context, an innovative maximum likelihood criterion for performing the decentralized fusion was presented in [
31], where the information from the local nodes were integrated as a weighted combination to provide the fused states. The weighting matrices were judiciously determined based on the cross covariance of the local estimates. However, these decentralized fusion approaches, have been implemented based on the assumption that the measurements from sensors are only influenced by an inherent unbiased Gaussian noise, while in reality, and for field robotic applications, the related measurements are spurious [
30] due to unexpected uncertainties, such as a temporal inoperative surrounding (such as low illumination condition, presence of smoke/dust etc.) fault, spike and sensor glitches. In such situations, the magnitude of inaccuracy in the measurements is much larger when compared to the normal noise [
32]. In order to address this issue, various fault detection and isolation methods, in combination with the decentralized fusion, are investigated in the related state of the art literature [
28,
33,
34].
In summary, distributed fusion is a robust framework to failures and can indicate the proper resiliency for critical applications, while eliminating the risk of single failures. Specifically in robotic applications, the approach of perception, in the direction of decentralized fusion, can handle the fundamental problem addressed in numerous implementations like multi-robot tracking, cooperative localization [
35] and navigation [
35], multi-robot Simultaneous Localization and Mapping (SLAM) [
36], distributed multi-view 3D reconstruction and mapping, and multi-robot monitoring [
37]. The map merging, data association, and robot localization can potentially be efficient only if the robots are enough capable to perceive autonomously the world. Therefore, centralized and decentralized fusion or in other words fusion in general, plays an important role in all robotic applications.
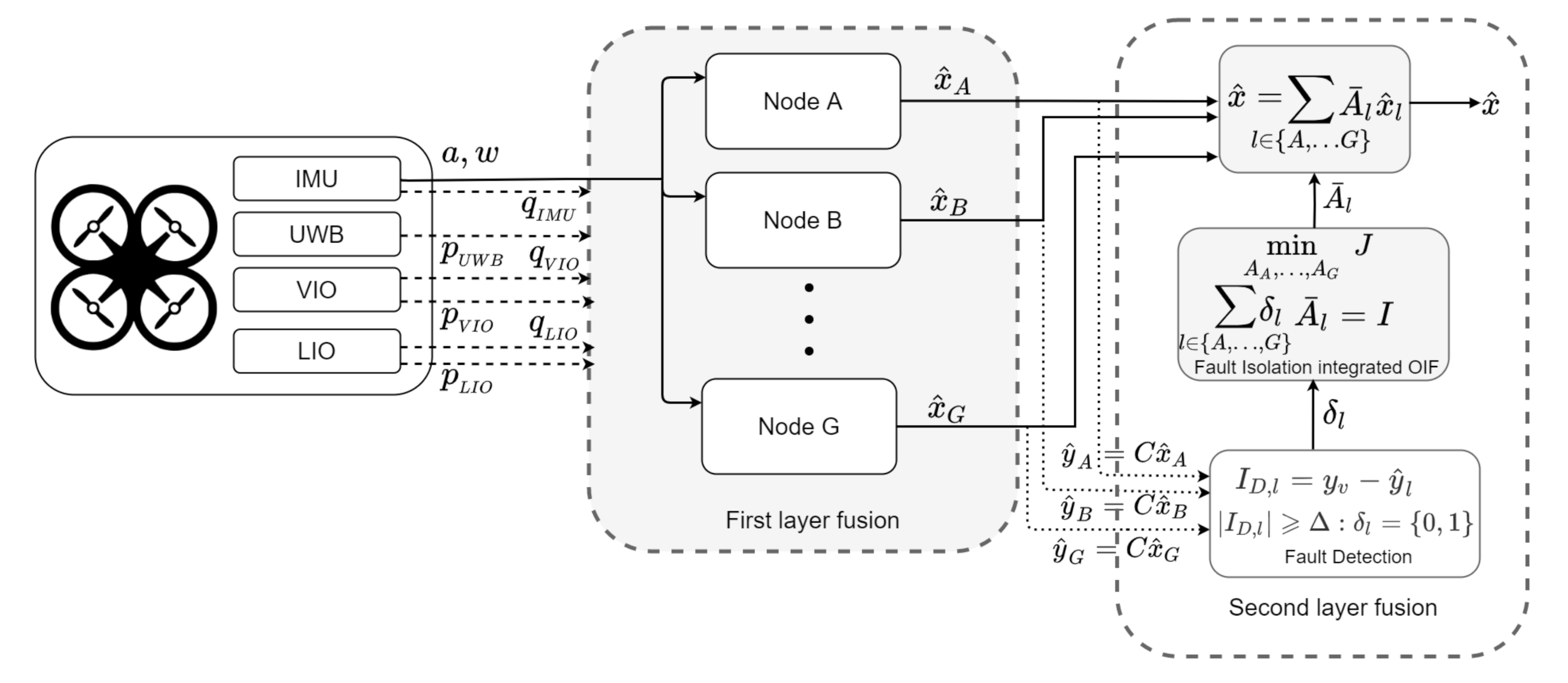
In this article, a unique decentralized multi-sensor fusion approach is proposed that introduces a novel flexible fault resilient structure, by isolating the information from the faulty sensor, while enabling the information provided by the other sensor measurements in an optimal information fusion framework. Furthermore, the classical optimal information fusion (OIF) presented in [
31] has a provision to incorporate a sensor level fault isolation, which operates as a separate unit. However, an increasing number of sensors/local nodes, along with the presence of temporal sporadic (spikes, temporary failure) measurements, demands a more flexible fusion architecture to account for fault resiliency in real time. In the present work, an innovative fault isolation mechanism is embedded with the OIF architecture by representing the isolation operation, as a constraint optimization problem. Thus, the novelty of this article stems from the novel application of an optimal information two-layered sensor fusion method, which has been modified ideally for handling sensor breakdown during operation, as it will be described in the sequel.
The main focus of this article is to develop a two-layered, multi-sensor fusion with self resiliency with the assistance of a unique optimal isolation algorithm. The technique works in several stages. In the first step, information from multiple asynchronous sensors is exhaustively exploited in an orderly sequence by introducing the concept of nodes. Each node individually fuses position and orientation information from independent sensors separately. In a way, the nodal architecture introduces the feasibility of distinguishing partially defective measurements and thereby broaden out the possibility of fusing all the acceptable information. For instance, if a sensor provides accurate position and defective orientation measurement for a short duration, utilization of the position measurement would be beneficial in lieu of discarding the entire sensor information. Next, in the second layer, the information from each node is blended in a weighted combination by employing an maximum likelihood estimator to obtain the most accurate pose collectively. Moreover, the proposed fault resilient optimal information fusion architecture incorporates an inbuilt fault isolation mechanism to discard disputed outcome from sensors. Once the disputed outcomes are observed, the weighing parameters of the optimal information filter are adjusted to accommodate the fault isolation. The second contribution stems from the effectiveness evaluation of the second layer fusion architecture when a sensor is not working correctly for a certain period or when the system receives inaccurate measurements from the sensors. In this case, an optimal information filter with fault handling capability is proposed and incorporated to get more robust and accurate responses from the corrupted outcomes. In this case, a modified co-variance weight scheme is introduced for combining all possible nodes in the second layer that is utilized to resolve the effect of erroneous measurements. The final contribution of the article is towards the performance comparison of the existing centralized and decentralized fusion techniques with the proposed novel decentralized fusion approach. Both existing methods methods perform well when measured sensor data are faultless, otherwise, the proposed fault resilient decentralized fusion scheme works far better than the existing centralized and decentralized filter estimation. The comparison of these different fusion architectures ha been carried out by using experimentally collected data sets.
2. Problem Formulation
Aiming towards a real-time, resilient and accurate navigation for autonomous exploration, through an unknown environment, aerial robotic vehicles equipped with multiple asynchronous real senors, as the one depicted in
Figure 1 will be considered as the base line of this novel work, without a loss of generality, since the overall framework has the merit to be platform agnostic. In this case, the considered sensor suite of the MAV contains a Velodyne Puck LITE, the Intel realsense camera T265, the IMU of a Pixhawk 4 flight controller, and a single UWB node. The collected point-cloud from the 3D-lidar is processed online to provide odometry based on [
38]. Essentially, the 3D-lidar odometry and the real sense camera T265 are capable of providing the real time 3D pose of the MAV independently, whereas, the IMU provides the measurements of angular velocity, as well as the acceleration of the MAV. In addition, a network of 5 UWB nodes is set strategically around the utilized flying arena, for estimating the position of the MAV based on the mounted UWB node. The overall objective is to provide a novel decentralized multi-sensor fusion architecture that can blend the information from various real sensor measurements to obtain the most accurate pose of the MAV in real-time. A schematic representation of the MAV pose is depicted in
Figure 2.
The pose is described using two reference frames, namely the world frame
and the body-fixed frame
. The body-fixed frame is attached to the MAV’s centre of mass, while the inertial frame is assumed to be attached at a point on the ground with its
and
Z axis directed along the East, North and Up (ENU) directions, respectively. The sensors are mounted in the body fixed frame
of the MAV, and provide the information regarding its pose. The position of the MAV (essentially the origin of the body-fixed frame) is defined as
, which is described with respect to the world frame
as shown in
Figure 2. The orientation of MAV with respect to the world frame can be visualized using the Euler angle representation
, denoting the roll, pitch and yaw rotations, respectively. In order to avoid the singularity associated with Euler angle, the orientation of the MAV is considered to be represented by quaternions [
39] denoted with
q. The position of the MAV,
p and its orientation,
q together designate the pose of the vehicle.
2.1. Asynchronous Sensors Associated with the Present Study
The under consideration MAV, equipped with various sensors, is presented in
Figure 1. The sensors that are considered in the present context are: (a) the IMU of a Pixhawk 4 flight controller that provides the acceleration
, the angular velocity
and the orientation
of the MAV, (b) the Velodyne Puck LITE radar assisted with Lidar Odometry (LIO) [
38] to provide a 3D pose of the MAV denoted by
, (c) the Intel Real-sense T265 visual sensor integrated with visual odometry (VIO) that provides a position and orientation denoted with
, and (d) the Ultra-Wideband (UWB) transceivers that provide the position of the MAV, denoted with
.
2.2. The MAV’s Utilized Kinematic Model
The decentralized sensor fusion architecture at its core utilizes the model based estimation framework, where the nonlinear kinematic model of the MAV is considered as [
40]:
where,
denotes the position,
represents the velocity,
stands for the orientation of the MAV in the form of quaternions representation. Here,
represents the total acceleration of the vehicle expressed in the inertial frame of references, where as
denotes the body rate experienced by the vehicle. Physically, these parameters (acceleration and body rates) are characterized as an input to the system, which are typically measured using an IMU denoted as
and
. In general, the measurements from sensors are noisy, which includes sensor bias as well. In order to establish this fact, the measurement signals are represented as:
where,
denotes the accelerometer bias and
represents the gyroscopic bias terms,
and
signify the additive noise for acceleration and angular rate, respectively,
denotes the transformation matrix, from the body to the world frame, and
denotes the gravity bias. Moreover, it has also been accounted that the bias factors
are driven by a process noise dynamically represented as:
where,
and
are the accelerometer and gyroscopic process noise, respectively. Rearranging Equation (4a,b), the total acceleration can be expressed as:
Substituting, Equations (4a,b) and (1b,c), respectively, yields:
The above equation of motion of MAV is expressed in a compact mathematical notation given as:
where, the state vector is denoted as
, the noisy measured input based on IMU reading is denoted as
and the random process noise
is defined as:
4. Experimental Framework Evaluation
For the experimental evaluation of the proposed scheme, collected data from a MAV under a manual flight is utilized. The platform and its components have been depicted in
Figure 1. In this case, the sensor suite of the MAV consists of the Velodyne Puck LITE based Lidar odometry, the intel real-sense camera T265 for visual odometry, the IMU of a Pixhawk 4 flight controller, and a single UWB node. The detail about the sensor suit is described in
Section 2. The MAV is manually flown in an approximate rectangular trajectory. During the experiment, information from the multiple sensors are recorded, which is used to evaluate the efficacy of the proposed FR-OIF framework. Apart form the on-board sensor suit, a Vicon motion capture system is used to provide the most accurate pose of MAV, which is considered as the ground truth in the present context.
The fusion method works in three different stages when sensor outcomes are faulty. In the first step, various nodes generate their equivalent estimated states and associated innovation (as presented in Equation (
11a)). The actuation input (Angular velocity
and linear acceleration
) for all the nodes are obtained from IMU, which is shared among all the nodes. In the second step, innovation terms for various nodes are compared with a constant threshold. The process essentially identifies the defective node. Eventually, in the last effort, the resilient fault isolation mechanism of FR-OIF architecture eliminates the faulty measurements. The corresponding numerical values for the various systems and design parameters that are considered in the present article are: initial guess for error co-variance
, initial state
, process noise co-variance
, measurement noise co-variance
, threshold tolerance for innovation
. The experimental results, along with a comparison study based on the centralized EKF approach will be presented in the sequel.
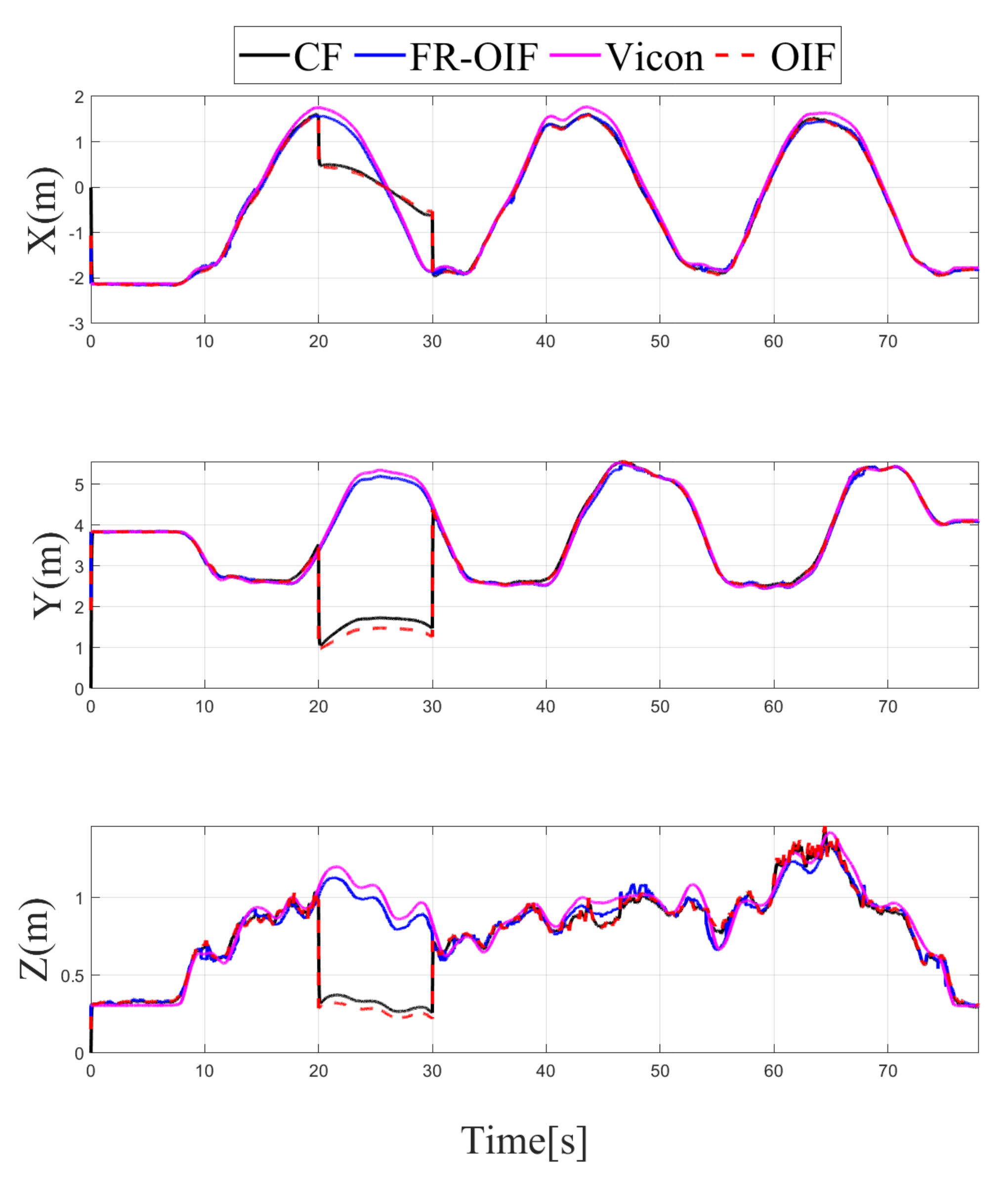
The estimated trajectory of the MAV is presented in
Figure 5. From the obtained results, it is evident that the FR-OIF provides a pose estimate that is approximately close to the ground truth trajectory obtained from the Vicon system. The variation of the estimated MAV position along
are presented in
Figure 6. It can be observed in
Figure 5 that, in the absence of faulty measurement, the estimated trajectory obtained from the Centralized fusion (CF) as well as the decentralized Optimal information fusion (OIF) are approximately equivalent. However, during the operating region, where a faulty measurement is encountered, both the estimated trajectories obtained based on CF and OIF significantly deviated from the ground truth. The variation of the MAV’s orientation in Euler angle representation is shown in
Figure 7. The estimated orientation, obtained from the FR-OIF, is approximately close to the Vicon based ground truth. However, during the experiment, when the aerial robot was roaming around the rectangular path of trajectory, it was manoeuvring with small-angle variation along with the roll, pitch and yaw. Hence, the noticeable performance improvement for FR-OIF is prominent in transnational motion compared to that of the rotations.
In order to demonstrate the effectiveness of the proposed fault resilient framework, momentary faults are synthetically introduced into the measured sensor data obtained during the experiment. The evaluation is carried out in multiple scenarios depicting presence of spurious measurement from multiple sensors, as follows:
Case-1: Temporal fault only in LIO measurement in between (20–30) s, while measurement from all other sensors are unaltered.
Case-2: Temporal fault only in VIO measurement in between (50–60) s, while measurement from all other sensors are unaltered.
Case-3: Temporal fault in both LIO and UWB measurements are itroduced in different operating points. The UWB measurement is faulty during (20–30) s, whereas for LIO reports faulty data during (35–45) s. Hence, this case evaluates multiple faults from different sensors in separate operating point.
Case-4: Simultaneous temporal failure of LIO and UWB appeared during (20–30) s.
Note that the sensor selected for reporting faulty operation and the corresponding time duration are arbitrarily selected without loss of generality. The variation of the estimated positions for all the possible cases under consideration is depicted in
Figure 8,
Figure 9,
Figure 10 and
Figure 11. It is evident from the results that the proposed FR-OIF is successfully capable of determining the MAV position in the presence of various possible failure conditions and temporal faulty sensor measurements. More significantly, from
Figure 11 one can visualize that the FR-OIF demonstrated its efficacy for a simultaneous failure of multiple sensors at a time, as described in case-4.
The variation of estimated position, obtained from the different nodes
are also depicted in
Figure 8,
Figure 9,
Figure 10 and
Figure 11, corresponding to the various cases under consideration. Each of the node, individually employing an EKF, indeed eventually removes the measurement noise from the estimated pose. However, the accuracy of the corresponding node depends on the measurement of sensor associated with it. For example, if we consider the situation as described in the Case-1, the faulty measurement is associated with the LIO. Hence, the estimated position from the node
B and
E, which are using the position information based on LIO, (refer to
Table 1) are inaccurate, as shown in
Figure 6. Similarly, one can observe here that the estimated orientation, obtained from the nodes
D and
F, are erroneous during (20–30) s the period of the faulty operation of LIO, since these nodes are using the LIO based orientation as a measurements. The equivalent analysis also holds for the remaining case studies.
4.1. Comparison of FR-OIF with Centralized and Distributed Fusion Approaches
In order to demonstrate the efficiency of the proposed FR-OIF, comparative study with the EKF based centralized multi-sensor fusion as well as decentralized optimal information fusion is presented here. For the sake of completeness, a brief description of the EKF based centralized fusion architecture is described in the sequel. The centralized EKF follows exactly the same steps of the prediction and correction approach, as described in Equations (
Section 3.1)–(
Section 3.1), with the only exception that the measured pose from the multiple sensors are collectively taken into account. Hence, the output equation is described as:
The dimension of the measurement noise co-variance matrix , Kalman gain and output gradient are redefined accordingly.
Apart from the EKF based centralized approach, a comparison study has been carried out with the existing decentralized OIF [
31] method. The formulation presented in [
31] considers a weighted sum of the individual node in the second layer fusion, as described in Equation (
18). Both the CF and OIF are evaluated for all the scenarios presented in the Case 1–4 with faulty sensor measurements from multiple sensors. The variations of the estimated pose for CF, OIF and FR-OIF are presented in
Figure 5,
Figure 6,
Figure 7 and
Figure 8. The comparison study reveals that in the absence of sporadic measurements, the performance of all the methods (CF, OIF and FR-OIF) under consideration are approximately equivalent. However, in the presence of faulty measurements (Case 1–4), it can be observed that the estimated trajectory, obtained from the CF and OIF approach, deviates from the ground truth. Moreover, the presented experimental study brings out another interesting fact where the performance of the OIF closely resembles with the CF. This is highlighted in
Figure 8, which is an emphasized version of
Figure 6 for a time duration of operation under the faulty measurements (and the fact is also evident in other figures as well). In contrast, FR-OIF is capable of providing an accurate pose estimation even in the presence of fault from multiple sensors.
4.2. Accuracy in Terms of the Root Mean Square Error
In this section, the accuracy of the fusion algorithms are evaluated in terms of Root Mean Square Error (RMSE). In this case, a comparison is made in two steps. Firstly, the estimated poses are compared using a sliding window RMSE where the corresponding plots are depicted in
Figure 12 and
Figure 13 in a logarithmic scale. Secondly, to compare the performance of the estimated pose, obtained based on various nodes and fusion approaches, the single value RMSE is computed and illustrated in
Table 2 and
Table 3.
Note that the RMSE errors are computed by considering the Vicon based ground truth as reference. The RMSE comparison table proves that the second layered FR-OIF method is superior when the sensor measurements are erroneous. In order to visualize the variation of RMSE error along the trajectory, a sliding-window logarithmic RMSE (RMSLE) is considered with a window size of 100 samples. Since, the RMSLE provides the error in a logarithmic scale, the smaller the magnitude is (more negative) the more signifies for a higher accuracy. From the variation of RMSLE, as presented in
Figure 12 and
Figure 13. Even though the root mean square error for orientations has slightly varied with the efficiency of the estimators.
Hence, transnational motion during the experiment was made significant changes in the RMSE
Table 2, as well as
Figure 12, however it is not significantly visible in
Table 3 and
Figure 13.
The proposed FR-OIF provides excellent performance in terms of RMSE, compared to the centralized fusion approach. Moreover, based on the experimental results it can concluded that the proposed multi-sensor fusion is capable to provide a resilient pose estimation in the presence of faulty measurements and it has a great potential for various practical applications, involving multiple sensors and with a sufficient redundancy.
In the present context, the evaluation of the proposed fault resilient fusion is carried out with the experimental data, where temporal sensor fault are synthetically injected for the purpose of validation. However, part of the future work will consider evaluating the proposed FR-OIF sensor fusion framework in a field robotic experiment, where a momentary sensor failure is unavoidable in presence of dusty/smokey and dark environment. Additionally it is to be noted that, In the presented approach, and as in the case of most of the fault detection approaches in the related literature, the has been ad hoc selected to a constant number and without loosing generality, while part of future work is also related to the adaptive determination of this value.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}