
Performance Analysis of a Vertical FSO Link with Energy Harvesting Strategy

 , , and
, , and
Abstract
:1. Introduction
1.1. Overview of FSO Communications
1.2. Related Work
1.3. Contributions
- 1.
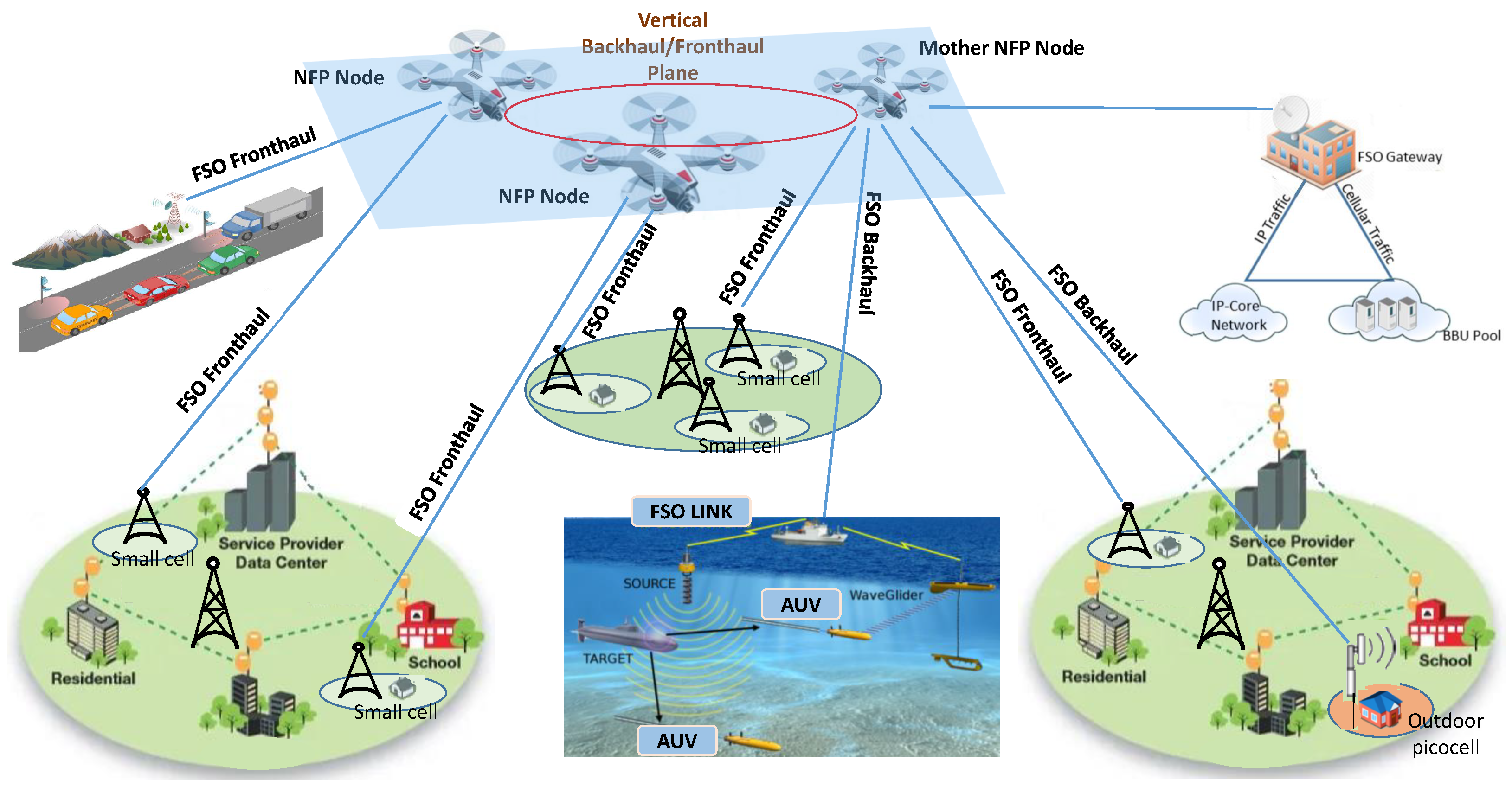
- We propose an accurate mathematical model for the UAV-based approach to provide backhaul connectivity for 5G+ networks [6]. To this end, ground stations and UAVs establish FSO links with EH to recharge the UAVs batteries and extend the service time. Furthermore, the UAVs will have another FSO link with the BSs to provide backhaul connectivity. The mathematical model considers realistic channel impairments such as turbulence fading (scintillation), atmospheric loss, pointing errors, and additive white Gaussian noise (AWGN).
- 2.
- We derive analytical closed-form expressions of the average harvested energy as a function of the FSO link parameters. These expressions can be used to improve energy harvesting efficiency of the FSO links.
- 3.
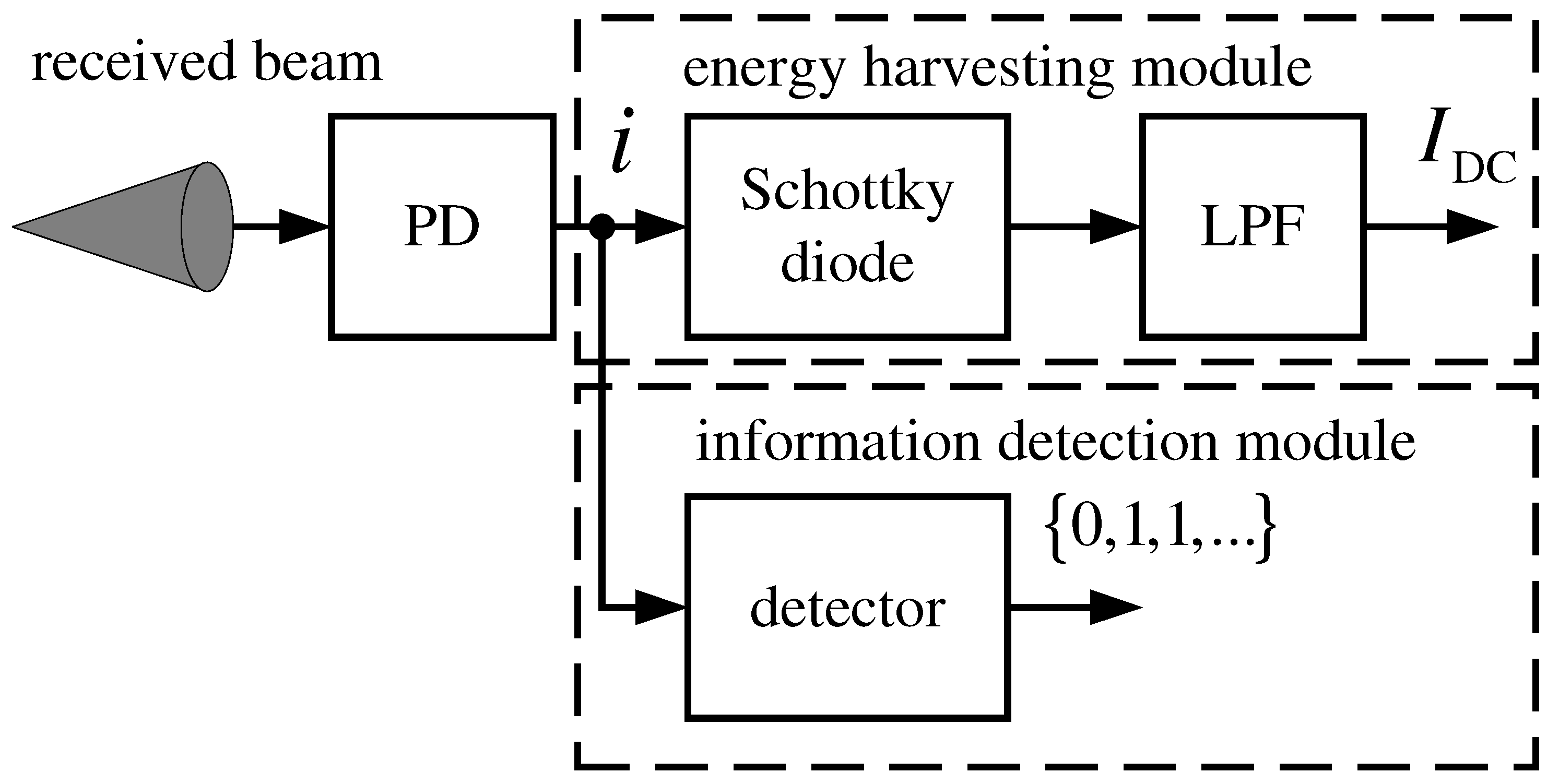
- Closed-form expressions for the BER have been obtained for links using a variant of the on-off Keying (OOK) scheme that has been properly modified to maximize the EH. With this scheme, which is referred to as OOK-EH, a certain fraction, , of the peak optical power, , is also transmitted with the symbol ‘0’ to recharge the batteries of the UAV.
- 4.
- We obtain the optimal value that maximizes the average harvested energy while maintaining its associated BER smaller than a target BER. Such a target BER is defined in practical communication standards to guarantee a reliable transmission.
- 5.
- The performance associated with the proposed scheme is corroborated with extensive Monte Carlo (MC) simulations in diverse and realistic atmospheric conditions. An excellent agreement between theoretical and simulation results is observed. Results reveal that the combination of FSO, EH, and UAVs provide reliable backhaul links while capturing energy to extend the UAVs service time. Let us recall that short lifetime of the batteries mounted on drones is seen as the main limitation of the proposed approach. For this reason, one of the main targets of our work is to obtain the optimal amount of energy that can be collected to charge the batteries of the UAVs involved in the system, as discussed in [30,31], while maintaining its performance in terms of BER.
2. System Model
2.1. Proposed Scenario
2.2. Received Signal Model
2.3. Atmospheric Turbulence Model
2.4. Atmospheric Attenuation
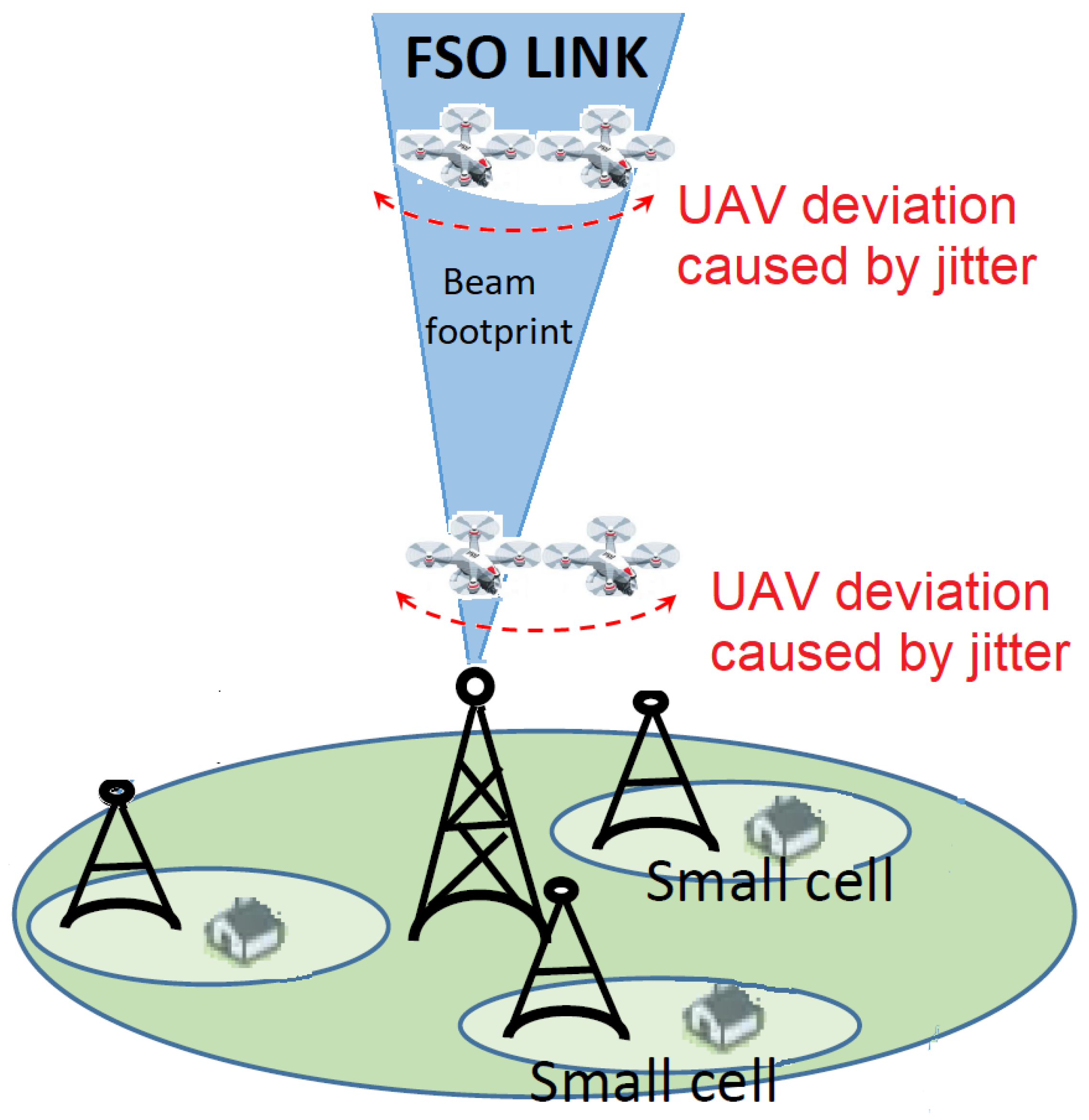
2.5. Geometric Spread and Pointing Error Model
2.6. Composite Channel Model
3. System Performance
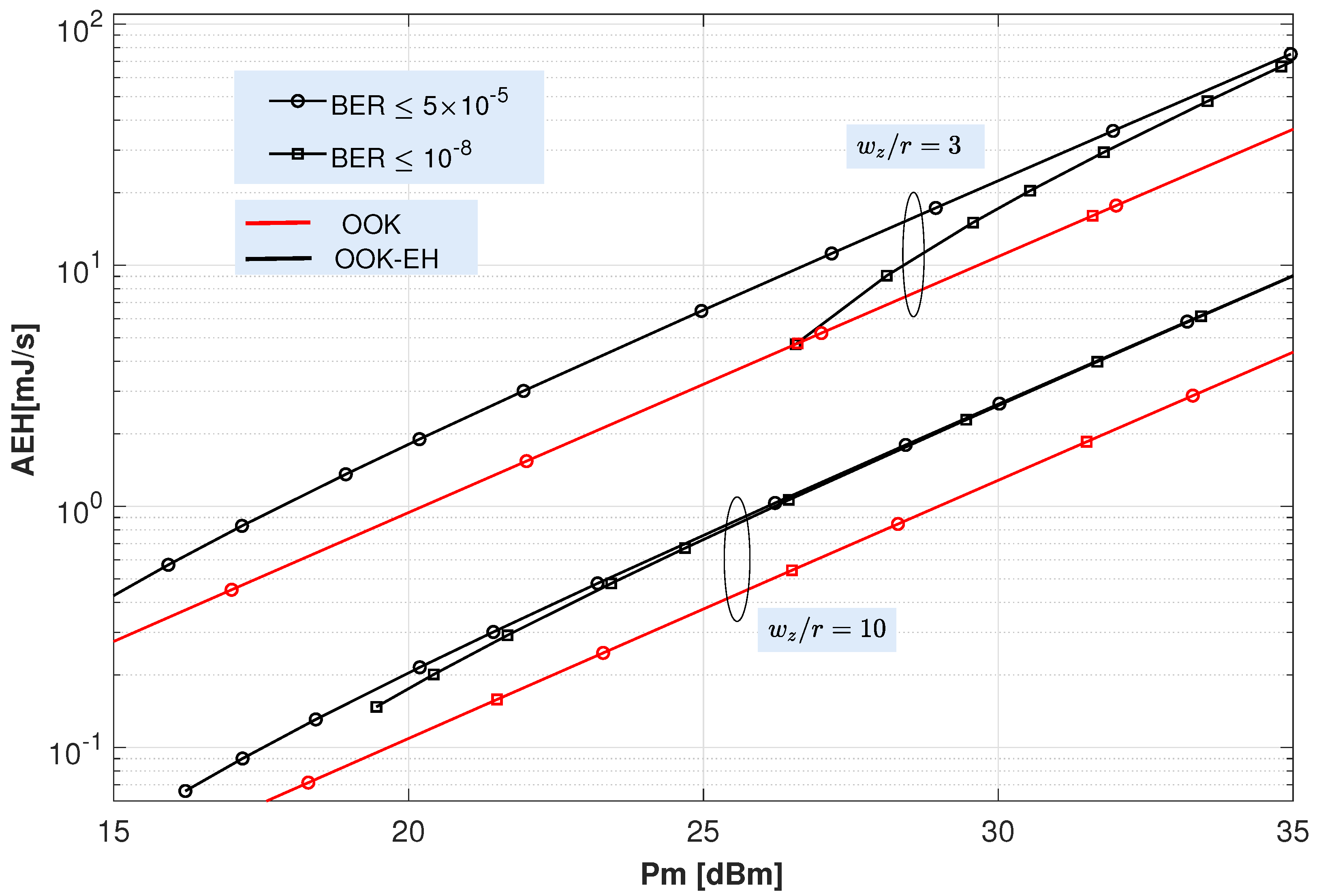
3.1. EH Performance
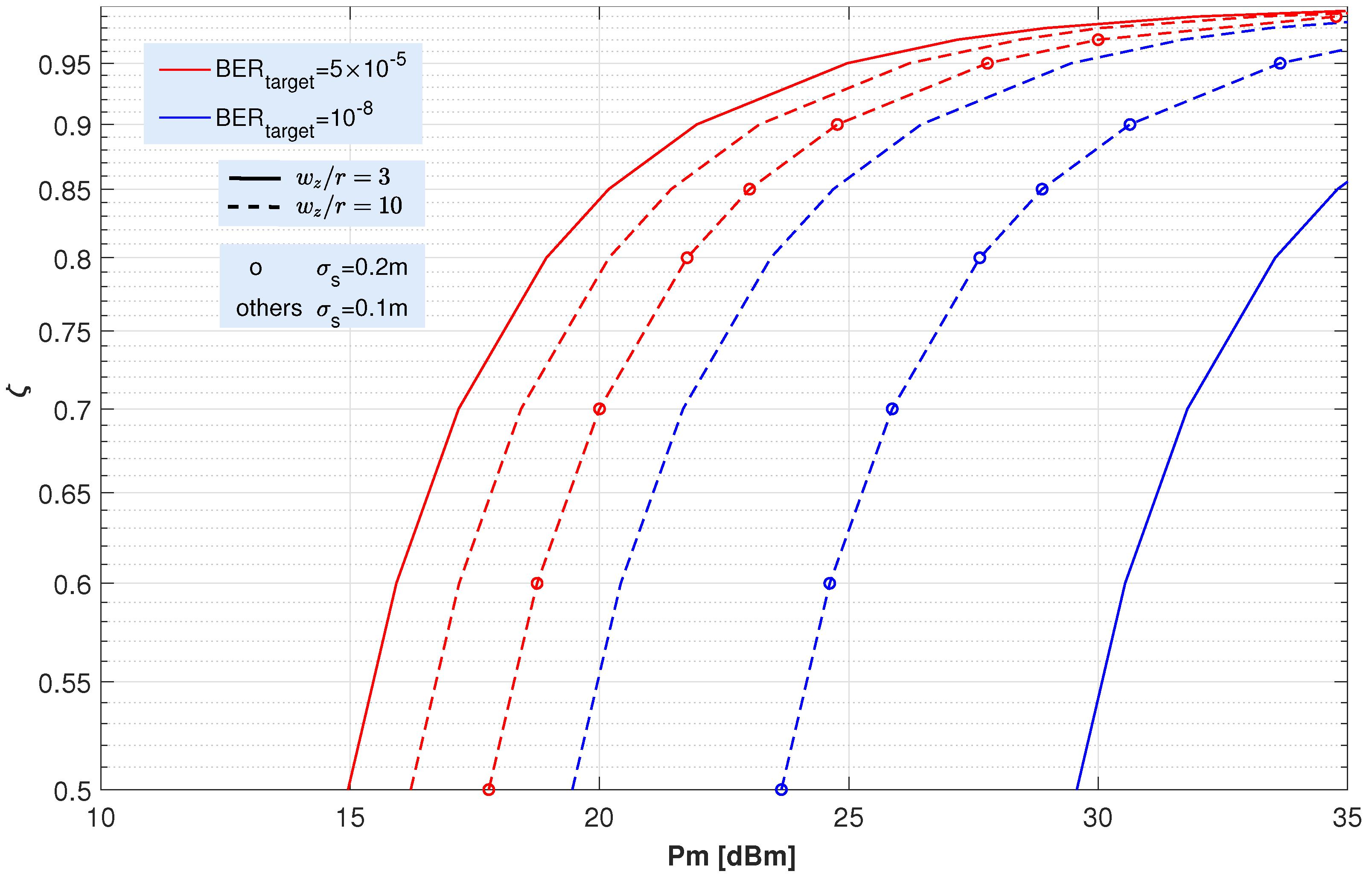
3.2. EH Optimization
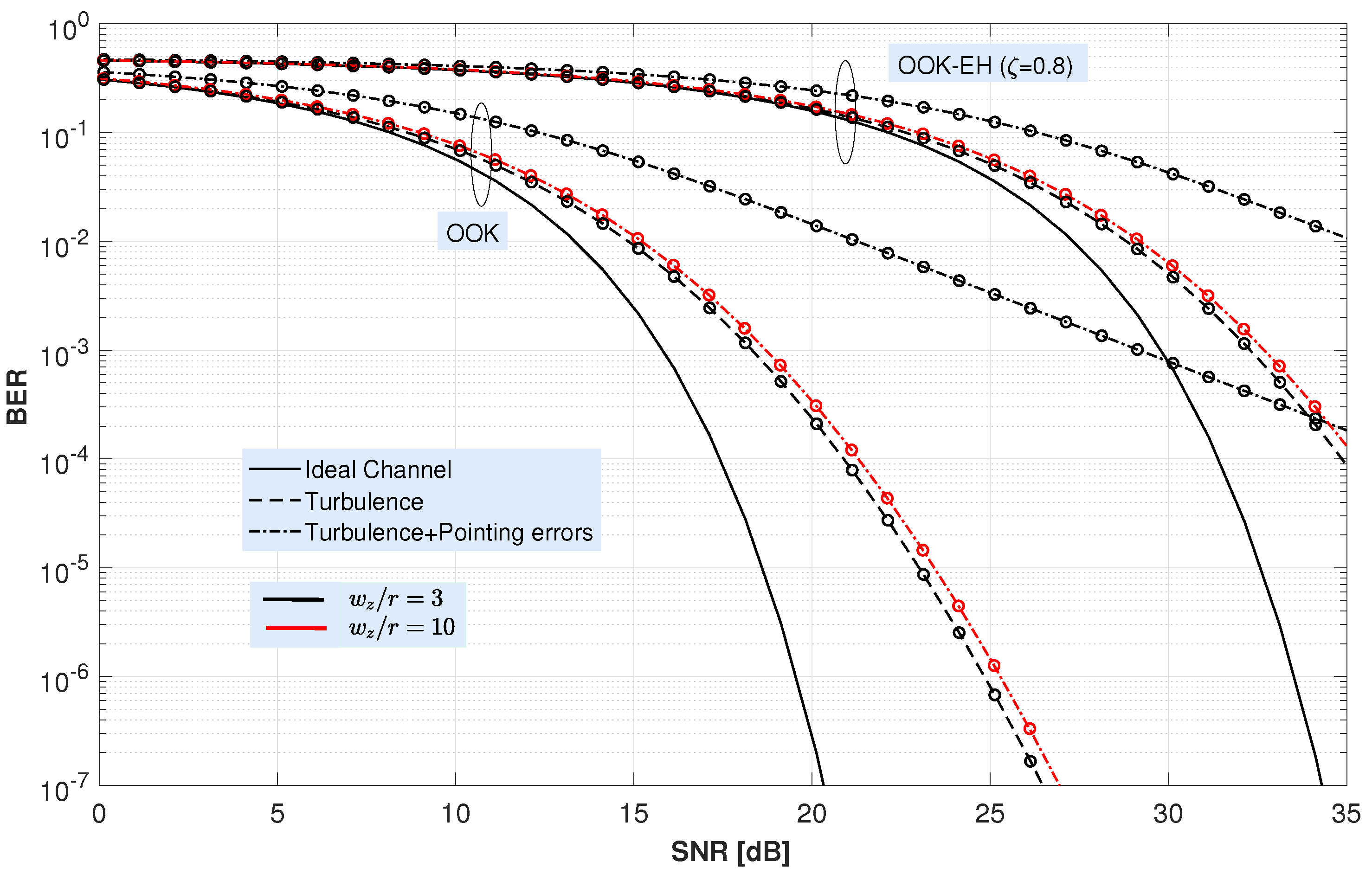
3.3. BER Performance
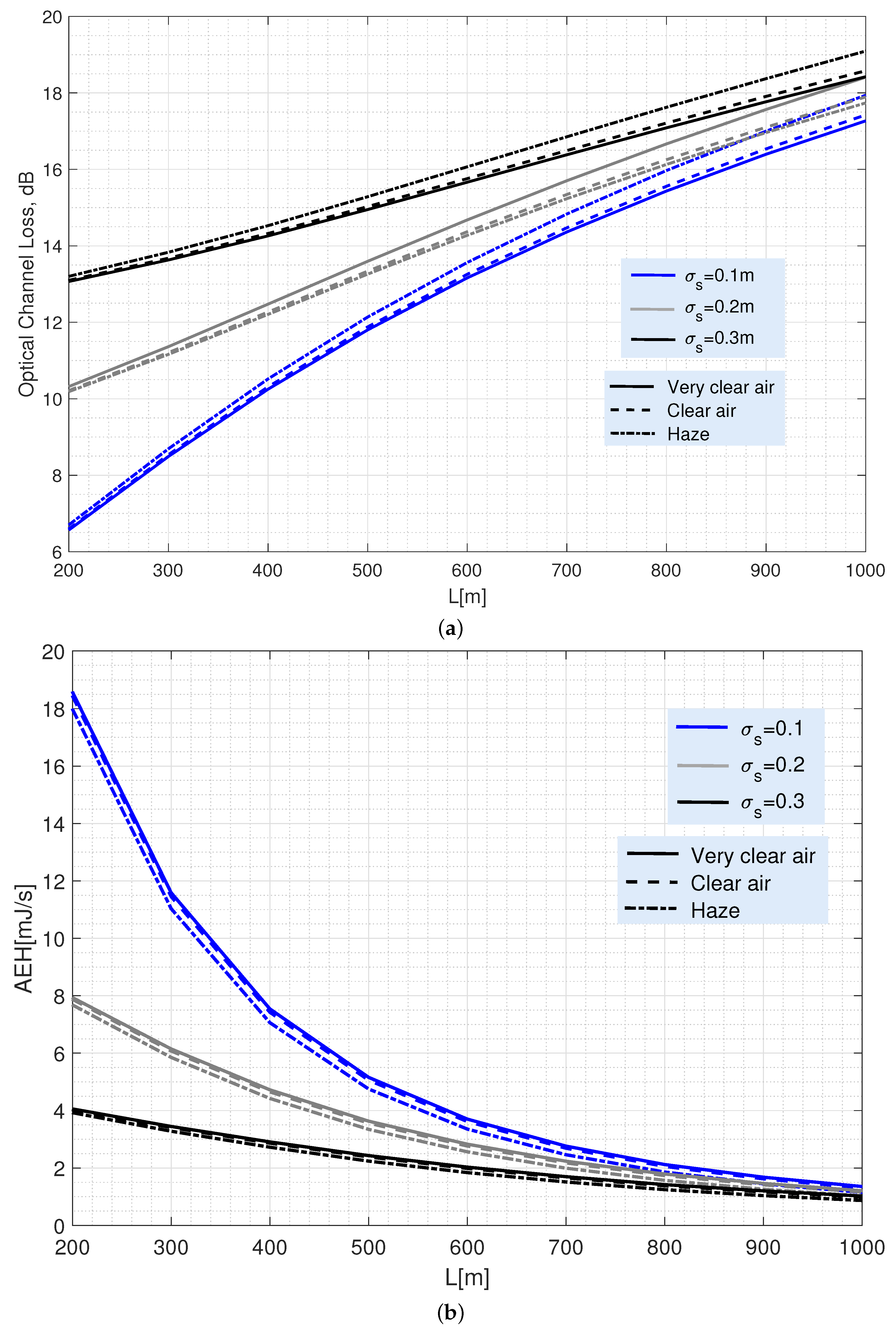
4. Results and Discussions
Optimization for EH
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AWGN | Additive white Gaussian noise |
| BBU | Base band unit |
| BER | Bit error rate |
| BS | Base station |
| C-RAN | Cloud RAN |
| EH | Energy harvesting |
| FEC | Forward error correction |
| FSO | Free space optical |
| IM/DD | Intensity-modulation direct-detection |
| MC | Monte Carlo |
| NFP | Networked flying platform |
| OOK | On-off keying |
| Probability density function | |
| PAM | Pulse amplitude modulation |
| PPM | Pulse position modulation |
| RAN | Radio access network |
| RRH | Radio remote head |
| RV | Random variable |
| SLIPT | Simultaneous light-wave information and power transfer |
| UAV | Unmanned aerial vehicle |
| V2X | Vehicular-to-everything |
References
- Khalighi, M.A.; Uysal, M. Survey on Free Space Optical Communication: A Communication Theory Perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Hamza, A.S.; Deogun, J.S.; Alexander, D.R. Classification Framework for Free Space Optical Communication Links and Systems. IEEE Commun. Surv. Tutor. 2019, 21, 1346–1382. [Google Scholar] [CrossRef]
- Kahn, J.; Barry, J. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef] [Green Version]
- Ghassemlooy, Z.; Arnon, S.; Uysal, M.; Xu, Z.; Cheng, J. Emerging Optical Wireless Communications-Advances and Challenges. IEEE J. Select. Areas Commun. 2015, 33, 1738–1749. [Google Scholar] [CrossRef]
- Wu, S.; Wang, H.; Youn, C.H. Visible light communications for 5G wireless networking systems: From fixed to mobile communications. IEEE Netw. 2014, 28, 41–45. [Google Scholar] [CrossRef]
- Alzenad, M.; Shakir, M.Z.; Yanikomeroglu, H.; Alouini, M.S. FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks. IEEE Commun. Mag. 2018, 56, 218–224. [Google Scholar] [CrossRef] [Green Version]
- Technology Demonstration Missions: Laser Communications Relay Demonstration (LCRD). Available online: http://www.nasa.gov/mission_pages/tdm/lcrd/index.html (accessed on 27 April 2022).
- Odeyemi, K.O.; Owolawi, P.A. A Mixed FSO/RF Integrated Satellite-High Altitude Platform Relaying Networks for Multiple Terrestrial Users with Presence of Eavesdropper: A Secrecy Performance. Photonics 2022, 9, 32. [Google Scholar] [CrossRef]
- Fidler, F.; Knapek, M.; Horwath, J.; Leeb, W.R. Optical Communications for High-Altitude Platforms. IEEE J. Select. Top. Quant. Electron. 2010, 16, 1058–1070. [Google Scholar] [CrossRef]
- Tang, S.; Dong, Y.; Zhang, X. Impulse Response Modeling for Underwater Wireless Optical Communication Links. IEEE Trans. Commun. 2014, 62, 226–234. [Google Scholar] [CrossRef]
- Jurado-Navas, A.; González Serrato, N.; Garrido-Balsells, J.M.; Castillo-Vázquez, M. Error probability analysis of OOK and variable weight MPPM coding schemes for underwater optical communication systems affected by salinity turbulence. OSA Cont. 2018, 1, 1131–1143. [Google Scholar] [CrossRef]
- Jurado-Navas, A.; Álvarez Roa, C.; Álvarez Roa, M.; Castillo-Vázquez, M. Cooperative Terrestrial-Underwater Wireless Optical Links by Using an Amplify-and-Forward Strategy. Sensors 2022, 22, 2464. [Google Scholar] [CrossRef] [PubMed]
- Jurado-Navas, A.; Garrido-Balsells, J.M.; Castillo-Vázquez, M.; García-Zambrana, A.; Puerta-Notario, A. Converging Underwater and FSO Ground Communication Links. In Proceedings of the 2019 Optical Fiber Communications Conference and Exhibition (OFC), San Diego, CA, USA, 3–7 March 2019; pp. 1–3, (Invited paper). [Google Scholar]
- Chowdhury, M.I.S.; Kavehrad, M.; Zhang, W.; Deng, P. Combined CATV and Very-High-Speed Data Transmission over a 1550-nm Wavelength Indoor Optical Wireless Link. In Next-Generation Optical Networks for Data Centers and Short-Reach Links; Srivastava, A.K., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2014; Volume 9010, pp. 38–45. [Google Scholar] [CrossRef]
- Hamza, A.S.; Deogun, J.S.; Alexander, D.R. Wireless Communication in Data Centers: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1572–1595. [Google Scholar] [CrossRef] [Green Version]
- Raddo, T.R.; Perez-Santacruz, J.; Johannsen, U.; Dayoub, I.; Haxha, S.; Monroy, I.T.; Jurado-Navas, A. FSO-CDMA Systems Supporting end-to-end Network Slicing. In Proceedings of the Imaging and Applied Optics Congress, Washington, DC, USA, 22–26 June 2020; Optical Society of America: Washington, DC, USA, 2020; p. JW2A.38. [Google Scholar]
- Qin, Y.; Kishk, M.A.; Alouini, M.S. Drone Charging Stations Deployment in Rural Areas for Better Wireless Coverage: Challenges and Solutions. IEEE Internet Things Mag. 2022, 5, 148–153. [Google Scholar] [CrossRef]
- Kaymak, Y.; Rojas-Cessa, R.; Feng, J.; Ansari, N.; Zhou, M.; Zhang, T. A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications. IEEE Commun. Surv. Tutor. 2018, 20, 1104–1123. [Google Scholar] [CrossRef]
- Andrews, L.; Phillips, R.; Hopen, C.; Al-Habash, M. Theory of optical scintillation. J. Opt. Soc. Am. A 1999, 16, 1417–1429. [Google Scholar] [CrossRef]
- Strohbehn, J. Modern theories in the propagation of optical waves in a turbulent medium. In Laser Beam Propagation in the Atmosphere; Springer: Berlin/Heidelberg, Germany, 1978; pp. 45–106. [Google Scholar]
- Al-Habash, M.; Adrews, L.; Phillips, R. Mathematical model for the irradiance probability density function of a laser beam propagating through turbulent media. Opt. Eng. 2001, 40, 1554–1562. [Google Scholar] [CrossRef]
- Barrett, J.L.; Budni, P.A. Laser beam propagation through strong turbulence. J. Appl. Phys. 1992, 71, 1124–1127. [Google Scholar] [CrossRef]
- Khalighi, M.; Xu, F.; Jaafar, Y.; Bourennane, S. Double-Laser Differential Signaling for Reducing the Effect of Background Radiation in Free-Space Optical Systems. J. Opt. Commun. Netw. 2011, 3, 145–154. [Google Scholar] [CrossRef]
- Saleh, B.E.A.; Teich, M.C. Fundamentals of Photonics; Wiley: Hoboken, NJ, USA, 1991. [Google Scholar]
- Santacruz, J.P.; Rommel, S.; Johannsen, U.; Jurado-Navas, A.; Monroy, I.T. Analysis and Compensation of Phase Noise in Mm-Wave OFDM ARoF Systems for Beyond 5G. J. Lightwave Technol. 2021, 39, 1602–1610. [Google Scholar] [CrossRef]
- Song, S.; Choi, M.; Ko, D.E.; Chung, J.M. Multi-UAV Trajectory Optimization Considering Collisions in FSO Communication Networks. IEEE J. Select. Areas Commun. 2021, 39, 3378–3394. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, K.H.; Alouini, M.S.; Ko, Y.C. Free Space Optical Communication on UAV-Assisted Backhaul Networks: Optimization for Service Time. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ulukus, S.; Yener, A.; Erkip, E.; Simeone, O.; Zorzi, M.; Grover, P.; Huang, K. Energy Harvesting Wireless Communications: A Review of Recent Advances. IEEE J. Select. Areas Commun. 2015, 33, 360–381. [Google Scholar] [CrossRef] [Green Version]
- Diamantoulakis, P.D.; Karagiannidis, G.K.; Ding, Z. Simultaneous Lightwave Information and Power Transfer (SLIPT). IEEE Trans. Green Commun. Netw. 2018, 2, 764–773. [Google Scholar] [CrossRef]
- Chen, J.; Yang, L.; Wang, W.; Yang, H.C.; Liu, Y.; Hasna, M.O.; Alouini, M.S. A Novel Energy Harvesting Scheme for Mixed FSO-RF Relaying Systems. IEEE Trans. Vehic. Technol. 2019, 68, 8259–8263. [Google Scholar] [CrossRef] [Green Version]
- Abou-Rjeily, C.; Kaddoum, G.; Karagiannidis, G.K. Ground-to-air FSO communications: When high data rate communication meets efficient energy harvesting with simple designs. Opt. Express 2019, 27, 34079–34092. [Google Scholar] [CrossRef] [PubMed]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Stochastic Geometry-Based Analysis of Airborne Base Stations With Laser-Powered UAVs. IEEE Commun. Lett. 2020, 24, 173–177. [Google Scholar] [CrossRef]
- Che, Y.L.; Long, W.; Luo, S.; Wu, K.; Zhang, R. Energy-Efficient UAV Multicasting With Simultaneous FSO Backhaul and Power Transfer. IEEE Wireless Commun. Lett. 2021, 10, 1537–1541. [Google Scholar] [CrossRef]
- Shehzad, M.K.; Ahmad, A.; Hassan, S.A.; Jung, H. Backhaul-Aware Intelligent Positioning of UAVs and Association of Terrestrial Base Stations for Fronthaul Connectivity. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2742–2755. [Google Scholar] [CrossRef]
- Gonzalez-Diaz, S.; Garcia-Saavedra, A.; de la Oliva, A.; Costa-Perez, X.; Gazda, R.; Mourad, A.; Deiss, T.; Mangues-Bafalluy, J.; Iovanna, P.; Stracca, S.; et al. Integrating Fronthaul and Backhaul Networks: Transport Challenges and Feasibility Results. IEEE Trans. Mob. Comput. 2021, 20, 533–549. [Google Scholar] [CrossRef] [Green Version]
- Jaber, M.; Imran, M.A.; Tafazolli, R.; Tukmanov, A. 5G Backhaul Challenges and Emerging Research Directions: A Survey. IEEE Access 2016, 4, 1743–1766. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G Wireless Networks: Vision, Requirements, Architecture, and Key Technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Álvarez Roa, M.; Álvarez Roa, C.; Fernández-Aragón, F.; Raddo, T.; Garrido-Balsells, J.M.; Monroy, I.T.; Jurado-Navas, A. Performance analysis of atmospheric optical communication systems with spatial diversity affected by correlated turbulence. J. Opt. Commun. Netw. 2022, 14, 524–539. [Google Scholar] [CrossRef]
- Andrews, L.C.; Phillips, R.L. Laser Beam Propagation Through Random Media; SPIE: Bellingham, WA, USA, 2005. [Google Scholar]
- Jurado-Navas, A.; Garrido-Balsells, J.M.; Paris, J.F.; Castillo-Vázquez, M.; Puerta-Notario, A. Impact of pointing errors on the performance of generalized atmospheric optical channels. Opt. Express 2012, 20, 12550–12562. [Google Scholar] [CrossRef] [PubMed]
- Garrido-Balsells, J.M.; Lopez-Martinez, F.J.; Castillo-Vázquez, M.; Jurado-Navas, A.; Puerta-Notario, A. Performance analysis of FSO communications under LOS blockage. Opt. Express 2017, 25, 25278–25294. [Google Scholar] [CrossRef] [Green Version]
- Weichel, H. Laser Beam Propagation in the Atmosphere; SPIE Optical Engineering Press: Bellingham, WA, USA, 1990. [Google Scholar]
- Naboulsi, A.; Sizun.; Fornel, D. Propagation of optical and infrared waves in the atmosphere. In Proceedings of the XXVIIIth URSI General Assembly, New Delhi, India, 23–29 October 2005. [Google Scholar]
- Farid, A.A.; Hranilovic, S. Outage Capacity Optimization for Free-Space Optical Links With Pointing Errors. J. Lightwave Technol. 2007, 25, 1702–1710. [Google Scholar] [CrossRef] [Green Version]
- Farid, A.A.; Hranilovic, S. Outage Probability for Free-Space Optical Systems Over Slow Fading Channels With Pointing Errors. In Proceedings of the LEOS 2006—19th Annual Meeting of the IEEE Lasers and Electro-Optics Society, Montreal, QC, Canada, 29 October–2 November 2006; pp. 82–83. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, R.; Ho, C.K. Wireless Information and Power Transfer: Architecture Design and Rate-Energy Tradeoff. IEEE Trans. Commun. 2013, 61, 4754–4767. [Google Scholar] [CrossRef] [Green Version]
- Abou-Rjeily, C.; Kaddoum, G. Free Space Optical Cooperative Communications via an Energy Harvesting Harvest-Store-Use Relay. IEEE Trans. Wireless Commun. 2020, 19, 6564–6577. [Google Scholar] [CrossRef]
- Wolfram. Available online: http://functions.wolfram.com/ (accessed on 24 July 2022).
- IEEE Standard for Ethernet–Amendment 2: Media Access Control Parameters, Physical Layers, and Management Parameters for 25 Gb/s Operation Amendment 2: Media Access Control Parameters, Physical Layers, and Management Parameters for 25 Gb/s Operation. In IEEE Std 802.3by-2016 (Amendment to IEEE Std 802.3-2015 as amended by IEEE Std 802.3bw-2015); IEEE: Piscataway, NJ, USA, 2016; pp. 1–244. [CrossRef]
- Jurado-Navas, A.; Garrido-Balsells, J.M.; Castillo-Vázquez, M.; Puerta-Notario, A.; Tafur-Monroy, I.; Vegas-Olmos, J.J. Optimal threshold detection for Málaga turbulent optical links. Opt. Appl. 2016, 46, 577–595. [Google Scholar]
- Song, T.; Wang, Q.; Wu, M.W.; Ohtsuki, T.; Gurusamy, M.; Kam, P.Y. Impact of Pointing Errors on the Error Performance of Intersatellite Laser Communications. J. Lightwave Technol. 2017, 35, 3082–3091. [Google Scholar] [CrossRef]
- Jurado-Navas, A.; Garrido-Balsells, J.M.; Paris, J.F.; Puerta-Notario, A. A unifying statistical model for atmospheric optical scintillation. In Numerical Simulations of Physical and Engineering Processes; Awrejcewicz, J., Ed.; In-Tech: Rijeka, Croatia, 2011; pp. 181–206. [Google Scholar]
- Garrido-Balsells, J.M.; Jurado-Navas, A.; Paris, J.F.; Castillo-Vazquez, M.; Puerta-Notario, A. Novel formulation of the M model through the Generalized-K distribution for atmospheric optical channels. Opt. Express 2015, 23, 6345–6358. [Google Scholar] [CrossRef]
- Wang, Q.; Lin, H.; Kam, P.Y. Tight bounds and invertible average error probability expressions over composite fading channels. J. Commun. Netw. 2016, 18, 182–189. [Google Scholar] [CrossRef]
- EKSMA Optics. Available online: https://eksmaoptics.com/ (accessed on 24 July 2022).
- Edmun Optics. 1550nm Laser Line Coated Fused Silica PCX Lenses. Available online: https://www.edmundoptics.es/f/1550nm-laser-line-coated-fused-silica-pcx-lenses/15064/ (accessed on 24 July 2022).
- 3GPP. Technical Specification Group Radio Access Network: Study on Enhanced LTE Support for Aerial Vehicles; Technical Report (TR) 36.777, 3rd Generation Partnership Project (3GPP); (3GPP) Mobile Competence Centre: Sophia Antipolis, France, 2017; Release 15.0.0. [Google Scholar]
- Wang, J.Y.; Ma, Y.; Lu, R.R.; Wang, J.B.; Lin, M.; Cheng, J. Hovering UAV-Based FSO Communications: Channel Modelling, Performance Analysis, and Parameter Optimization. IEEE J. Select. Areas Commun. 2021, 39, 2946–2959. [Google Scholar] [CrossRef]
- 3GPP. 5G; Study on Scenarios and Requirements for Next Generation Access Technologies; Technical Report (TR) 39.913, 3rd Generation Partnership Project (3GPP); (3GPP) Mobile Competence Centre: Sophia Antipolis, France, 2022; Version 17.0.0. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FSO Parameters | ||
|---|---|---|
| Parameter | Symbol | Value |
| Operating Wavelength | 1550 nm | |
| Transmitter divergence | 1 mrad | |
| Responsivity | R | A/W |
| Receiver aperture radius | r | 10 cm |
| Field of view | FOV | |
| Optical Bandwidth | 10 nm | |
| Noise Bandwidth | 1 GHz | |
| Spectral radiance | 1 mW/cm nm srad | |
| Turbulence, pointing error and climatic parameters | ||
| Parameter | Symbol | Value |
| Structure parameter | m | |
| Number of large-scale cells | 30 | |
| Number of small-scale cells | 30 | |
| Jitter variance | 10 cm | |
| Attenuation coefficient (very clear air) | a | dB/km |
| Attenuation coefficient (clear air) | a | dB/km |
| Attenuation coefficient (haze) | a | dB/km |
| EH parameters | ||
| Parameter | Symbol | Value |
| Fill factor | f | |
| Dark saturation current | A | |
| Thermal voltage | 25 mV | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez-Roa, C.; Álvarez-Roa, M.; Martín-Vega, F.J.; Castillo-Vázquez, M.; Raddo, T.; Jurado-Navas, A. Performance Analysis of a Vertical FSO Link with Energy Harvesting Strategy. Sensors 2022, 22, 5684. https://0-doi-org.brum.beds.ac.uk/10.3390/s22155684
Álvarez-Roa C, Álvarez-Roa M, Martín-Vega FJ, Castillo-Vázquez M, Raddo T, Jurado-Navas A. Performance Analysis of a Vertical FSO Link with Energy Harvesting Strategy. Sensors. 2022; 22(15):5684. https://0-doi-org.brum.beds.ac.uk/10.3390/s22155684
Chicago/Turabian StyleÁlvarez-Roa, Carmen, María Álvarez-Roa, Francisco J. Martín-Vega, Miguel Castillo-Vázquez, Thiago Raddo, and Antonio Jurado-Navas. 2022. "Performance Analysis of a Vertical FSO Link with Energy Harvesting Strategy" Sensors 22, no. 15: 5684. https://0-doi-org.brum.beds.ac.uk/10.3390/s22155684