4.1. Manipulator
As an example of a non-wrist-partitioned cobot, we tailored our derivation to Kinova Gen3 lite, a serial manipulator with six revolute joints each having limited rotation and a two-finger gripper as the end-effector (EE). The Denavit–Hartenberg (DH) parameters of this robot are given in
Table 1 (numerical values given in
Section 8.1), where the non-zero parameters are identified. With the parameters in this table, it is clear that this robot is not wrist-partitioned since
. Thus, well-known methodologies to find the decoupled solution of the IKP cannot be used.
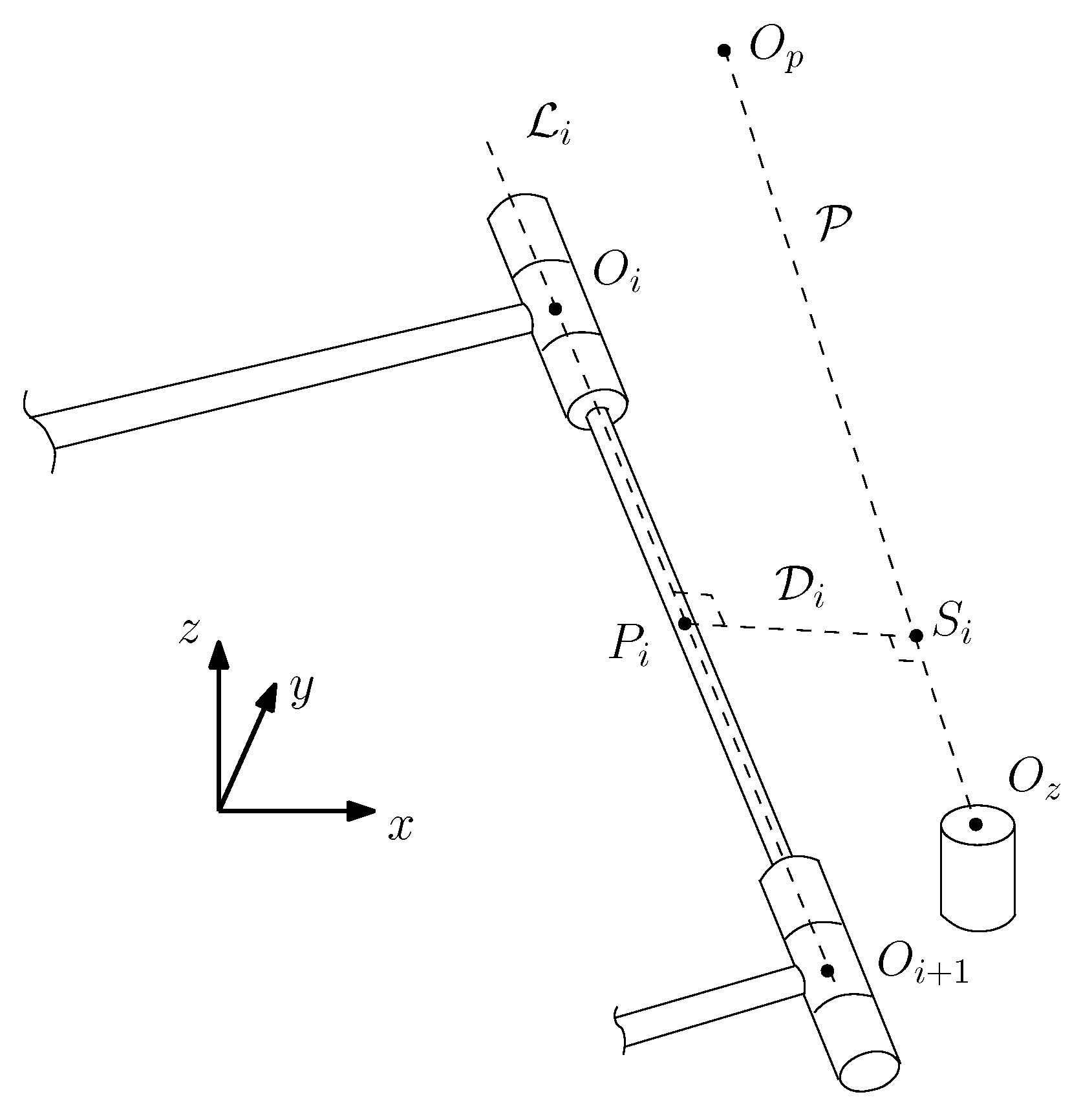
As shown in
Figure 1, a DH reference frame is attached to each link. It should be noted that these frames are not necessarily located at the joints. The rotation matrices
and the position vectors
related to the successive reference frames defined on each of the links of the robot [
29] can be written as
where the rotation matrix
rotates frame
i into the orientation of frame
and the vector
connects the origin of frame
i to the origin of frame
. The joint variables are noted
while
,
and
are the DH parameters representing the geometry of the Kinova Gen3 lite. The end-effector is located at the origin of frame 7, which is defined by the three-dimensional vector
. The orientation of the end-effector is given by the rotation matrix from frame 1 to frame 7, noted as
.
4.2. IKP Analytical Solution
The forward kinematic problems (FKPs), i.e., the Cartesian position
and orientation matrix of the tool
, are straightforward and can be written as
where
is the
identity matrix. The first step toward solving the IKP of the Gen3 lite is to reduce the number of unknowns, currently six for the six joint positions
, to one, reducing the problem to a univariate polynomial equation that can be solved. By finding expressions for
and
and substituting them in
, we can readily reduce the number of unknowns. First, we need to compute
, connecting the origin of frame 1 to the origin of frame 6, which can be written similarly to the left-hand part of Equation (
2) as
By pre-multiplying Equation (
3) by
and isolating all expressions independent of
on the right-hand side, we have a set of three scalar equations. Among them, two stand out as only being functions of
,
and
:
where
is the
ith component of
,
,
,
and
stand, respectively, for
,
,
and
. The last scalar equation remaining after pre-multiplying Equation (
3) by
and will be needed later in the derivation:
which can be rewritten to obtain an expression of
:
We are now able to solve Equations (
4) and (
5) for
and
. Substituting the results in
, we obtain
where
,
and
are functions of the DH parameters and
,
and
.
Having a first equation expressed as a function of
and
, a second one is needed to compute
. Matrices
being orthogonal matrices, the right-hand part of Equation (
2) can be recast into
This equation gives us a system of nine scalar equations. However, only five are relevant, with the ones defining the first two components of the last row and the three components of the last column of the resulting matrices. On the one hand, the former can be used to obtain expressions of
and
:
These two equations will be useful later in the paper. On the other hand, the components of the last column are not a function of
, because the latter corresponds to a rotation of the last joint about the
z-axis of the end-effector. Therefore, the last column, defining a unit vector parallel to this axis, must be independent of
. With this column, we obtain the following scalar equations, which are cast in an array form with dialytic elimination:
where
is a three-dimensional zero vector and
with, after some simplifications,
In the above expressions,
is the (i, j)th component of the end-effector orientation matrix
. It can be seen that
, a homogeneous matrix, in Equation (
11a), is singular, as vector
cannot vanish. Therefore, we have
where
,
and
are functions of the EE pose,
and
only. Equations (
8) and (
12) can now be solved for
and
, and substituted in
, yielding
and, finally,
Having eliminated all expressions of
and
with the procedure above, Equation (
13c) is only a function of
and
, bringing us closer to our objective of finding a univariate polynomial equation. Equation (
13c) can be factorized as a function of powers of
and
, giving us
where the coefficients
are solely dependent of
. With Equation (
7), Equation (
14) becomes
with
where
and
are only functions of the DH parameters and the orientation
and position
of the tool. The above equation can be solved for
, then substituted, with Equation (
7) in
. The resulting univariate equation is
Equation (
16) is one of degree 8 in terms of
and of degree 1 in terms of
. Then, using the Weierstrass substitution, Equation (
16) is finally transformed into a polynomial in
:
where
are functions of the DH parameters and the pose of the end-effector of the manipulator at hand. The roots of this univariate polynomial can then be computed to obtain
, leading to the values of
. Some of these solutions may be complex numbers and some can be duplicates. For control, only the real roots can be considered. Using a subset of the equations presented above, it is possible to compute all other joint angles for each real solution. For all remaining joint angles, a single trigonometric function is needed, i.e.,
. The equation numbers for expressions of
(
) and
(
) are given in
Table 2. The back substitution procedure must be conducted following the order from left to right and top to bottom presented in this table, starting with
. Finally,
is easily computed from
and
.
4.3. Special Cases
Similar to the majority of similar algorithms, some special cases must be considered. The special cases considered here are similar to those pointed out by Gosselin and Liu [
10] for another manipulator; their methodology can also be applied to this manipulator.
First, it is possible that coefficient
V in Equation (
15a) becomes equal to zero. Since, according to the procedure detailed in the previous section, both
and
are required, the value of
cannot be computed with
atan2. Instead,
arccos must be used, and two values of
for a single
will be obtained. Of course, since the total number of solutions cannot exceed 16, some will be repeated. Another possible special case arises when
is equal to zero. Thereby, Equations (
13a) and (
13b) cannot be computed. Instead, Equations (
8) and (
12) are solved for
with the Weierstrass substitution previously mentioned, leading to two solutions for
for a single
. As always, no more than 16 unique sets of joint angles can be obtained, which means there will be some repeated solutions again.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}