
Scalable OneM2M IoT Open-Source Platform Evaluated in an SDN Optical Network Controller Scenario †

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Related Work
3. The OneM2M IoT Platform and Proposed Implementation for Optical Network Control
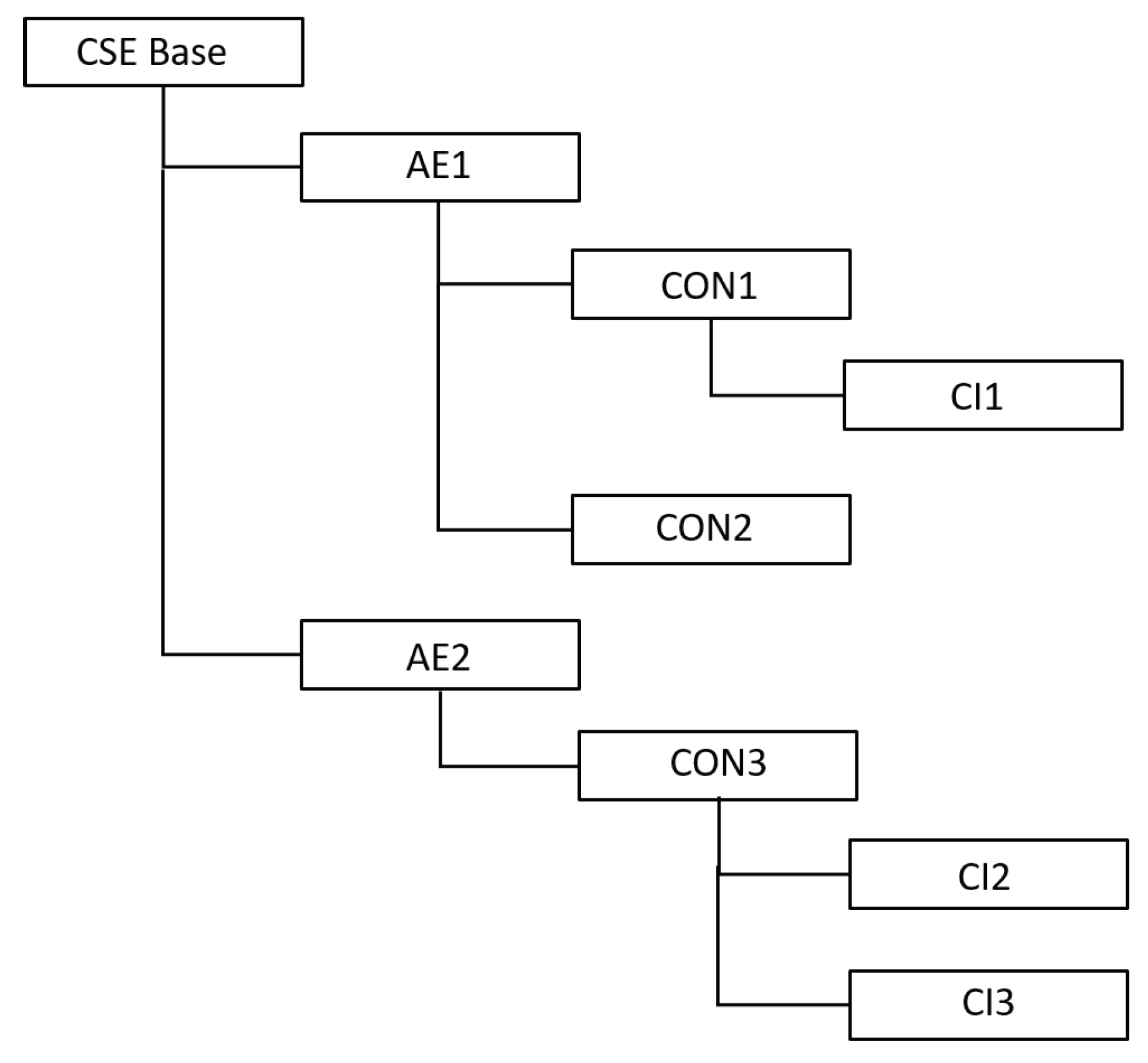
3.1. The OneM2M Standard
3.2. The Motivation for an OneM2M-Based SDN Optical Controller
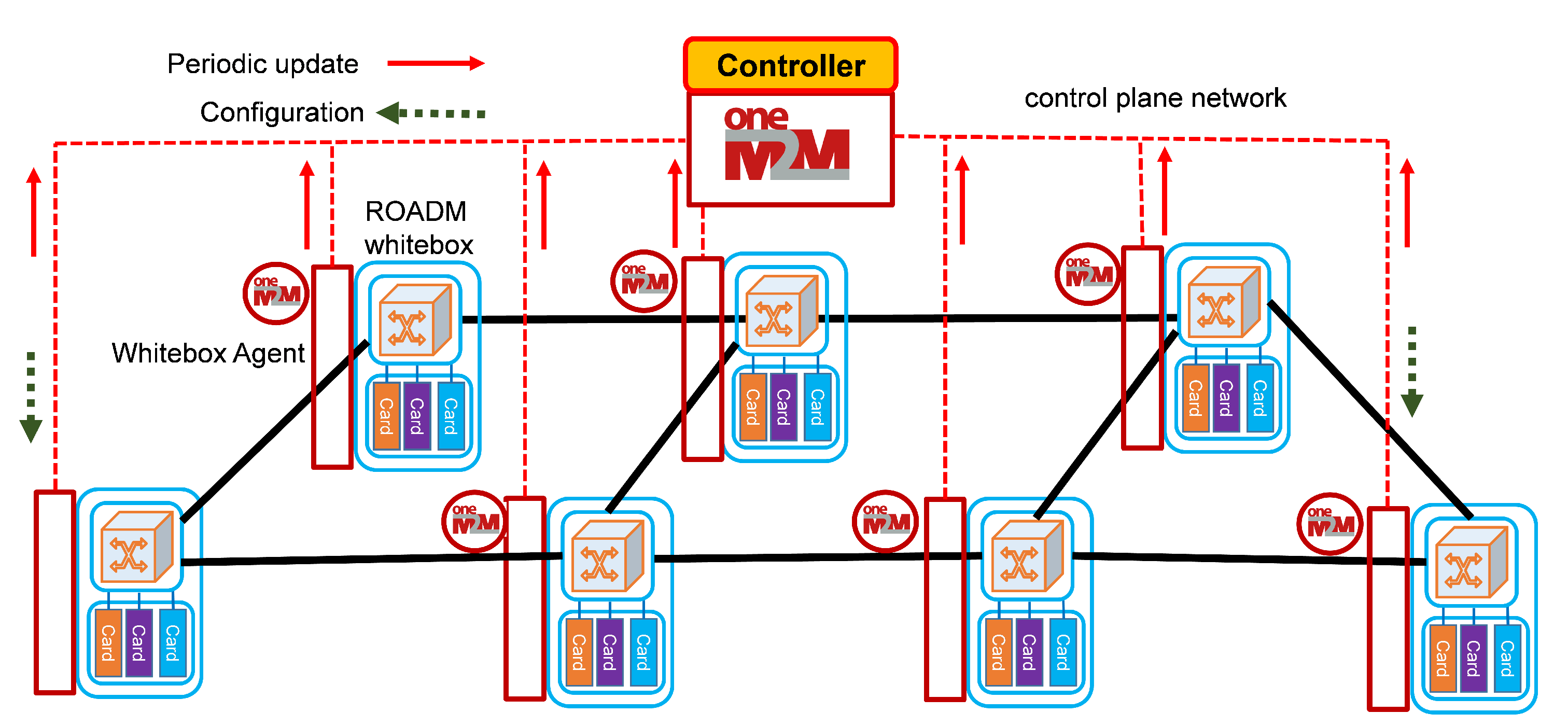
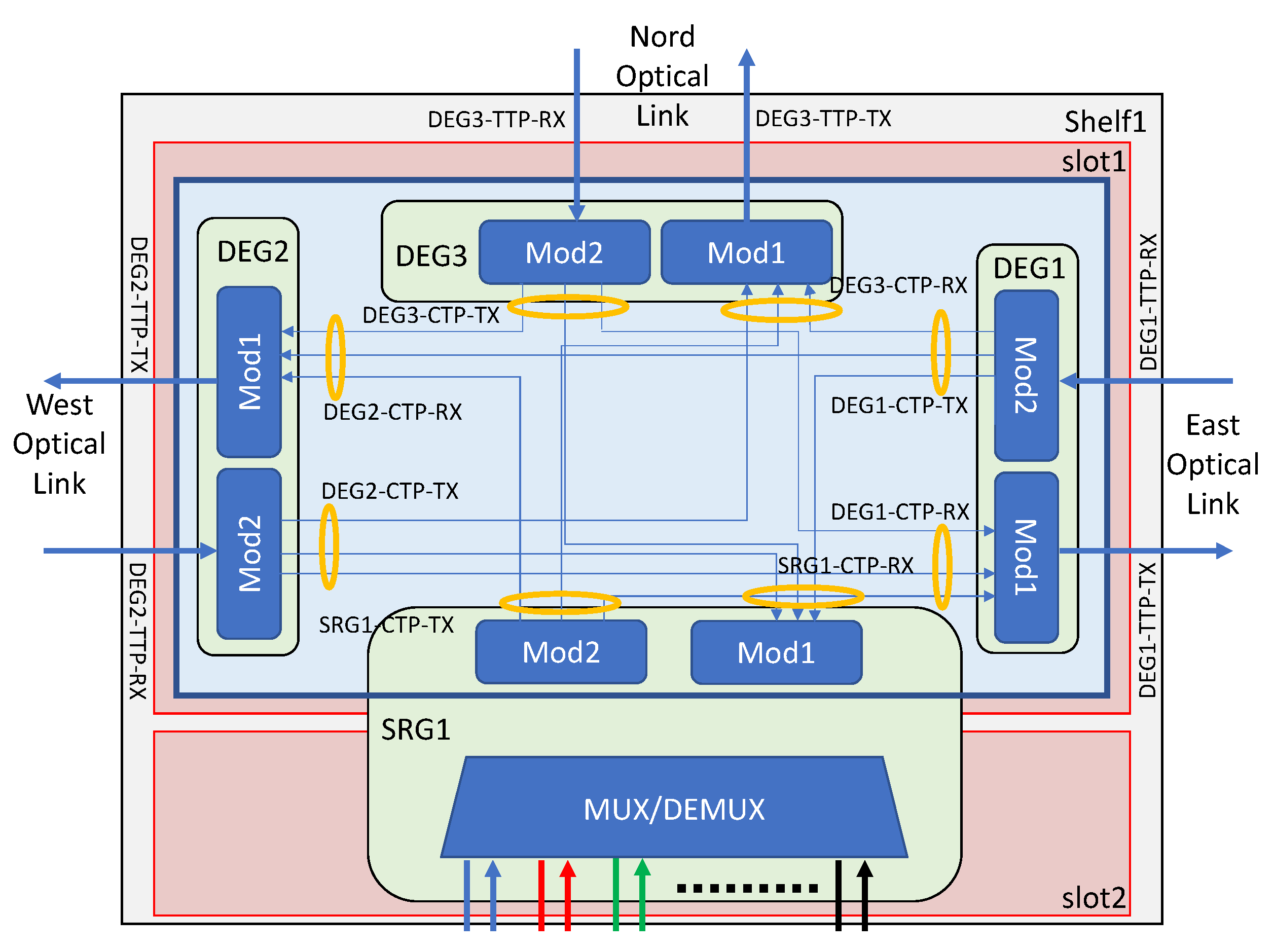
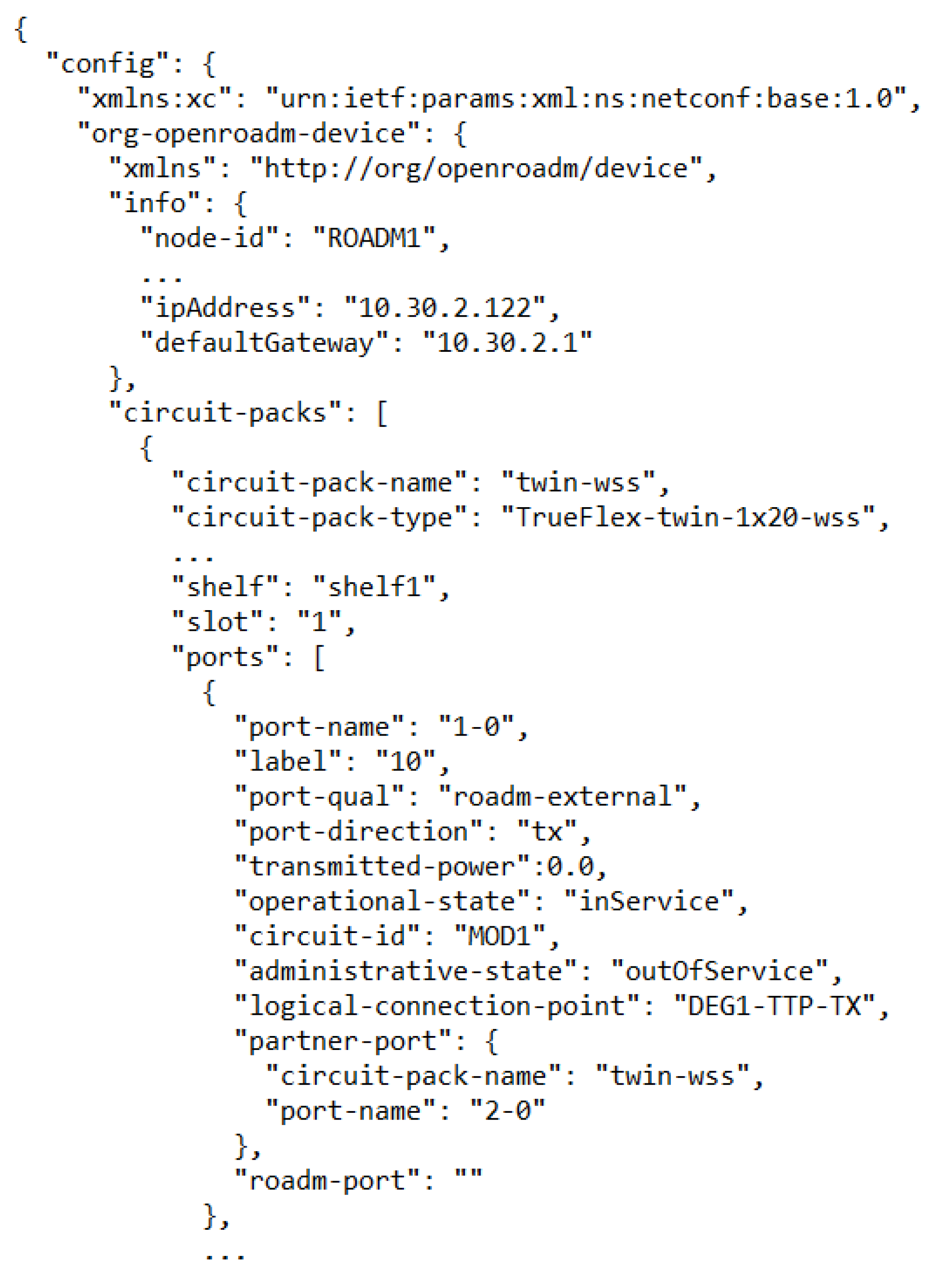
3.3. The OneM2M Platform for an Optical Network
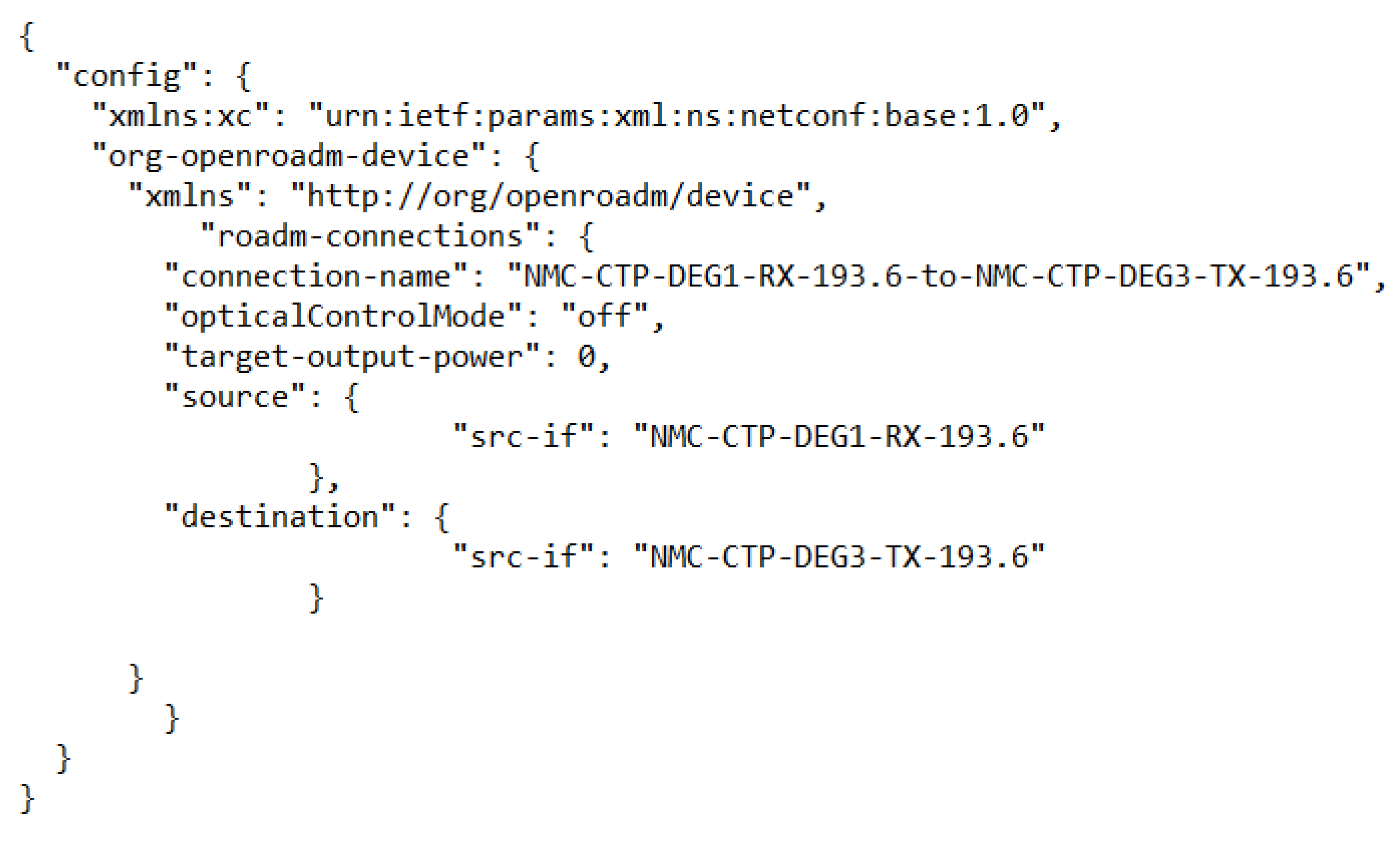
3.3.1. Implementation of the First Use Case
| Listing 1. Pseudo-code of one of the N ROADM agents. |
| while (True): |
| for every circuit pack: |
| for every port: |
| if port-direction ==“tx”: |
| <read tx power from device port> |
| else if port-direction ==“rx”: |
| <read rx power from device port> |
| <prepare message for the OneM2M> |
| <send message> |
| <sleep(sleeping-time)> |
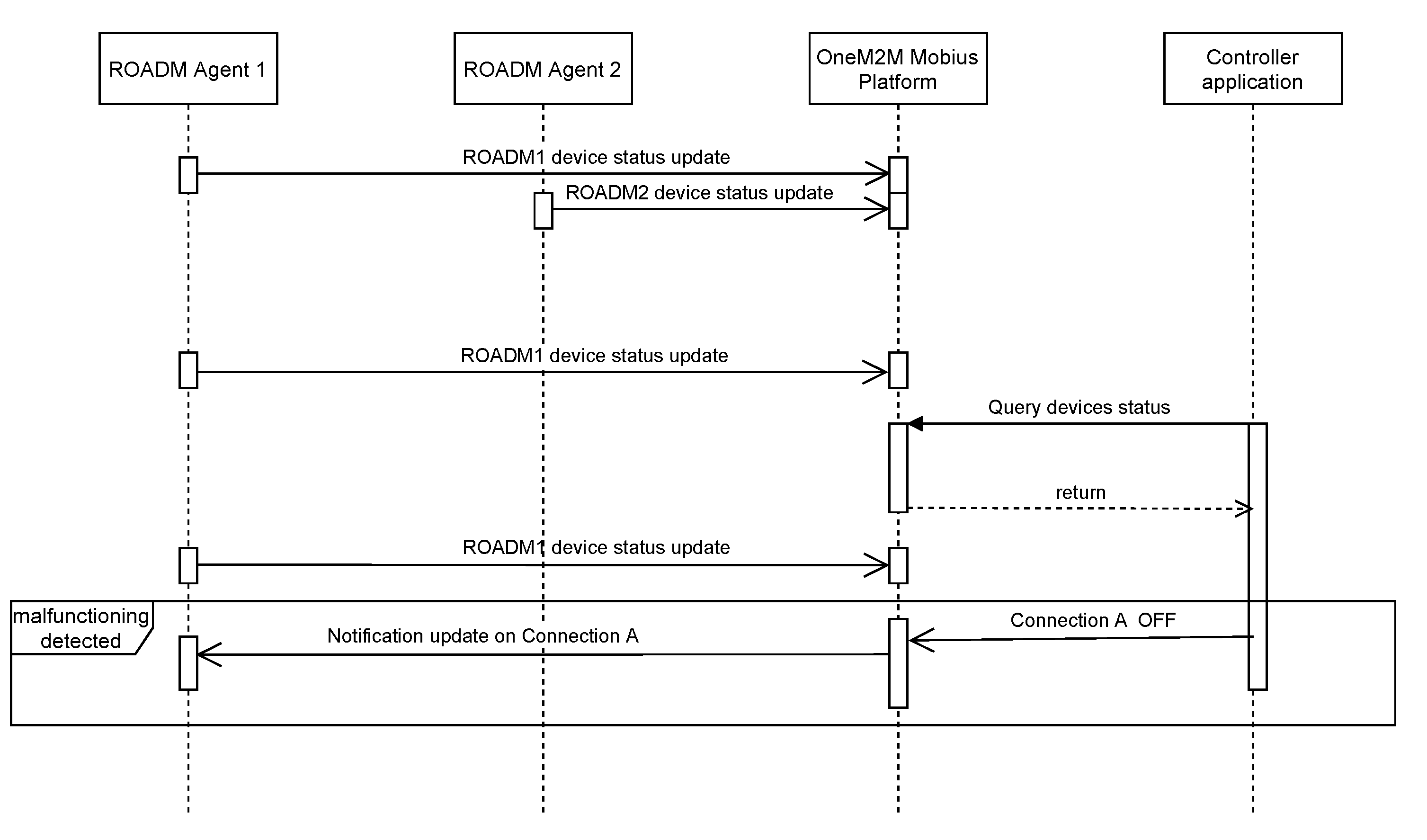
3.3.2. Implementation of the Second Use Case
| Listing 2. Pseudo-code of one of the M ROADM agents. |
| main(): |
| ... |
| for every connection with other ROADM devices: |
| <subscribe to updates for connection status on the OneM2M > |
| while (True): |
| for every circuit pack: |
| for every port: |
| if port-direction ==“tx”: |
| <read tx power from device port> |
| else if port-direction ==“rx”: |
| <read rx power from device port> |
| <prepare message for the OneM2M> |
| <send message> |
| <sleep(sleeping-time)> |
| newSubscriptionUpdate(): |
| <get the body of the update> |
| <process the received information> |
| <compute > |
| Listing 3. Pseudo-code of the controller. |
| while (True): |
| <query the OneM2M for the status of ROADM devices> |
| for every device: |
| if malfunctioning is detected: |
| <see connections of device> |
| for every broken connection: |
| <prepare message for the OneM2M> |
| <send message> |
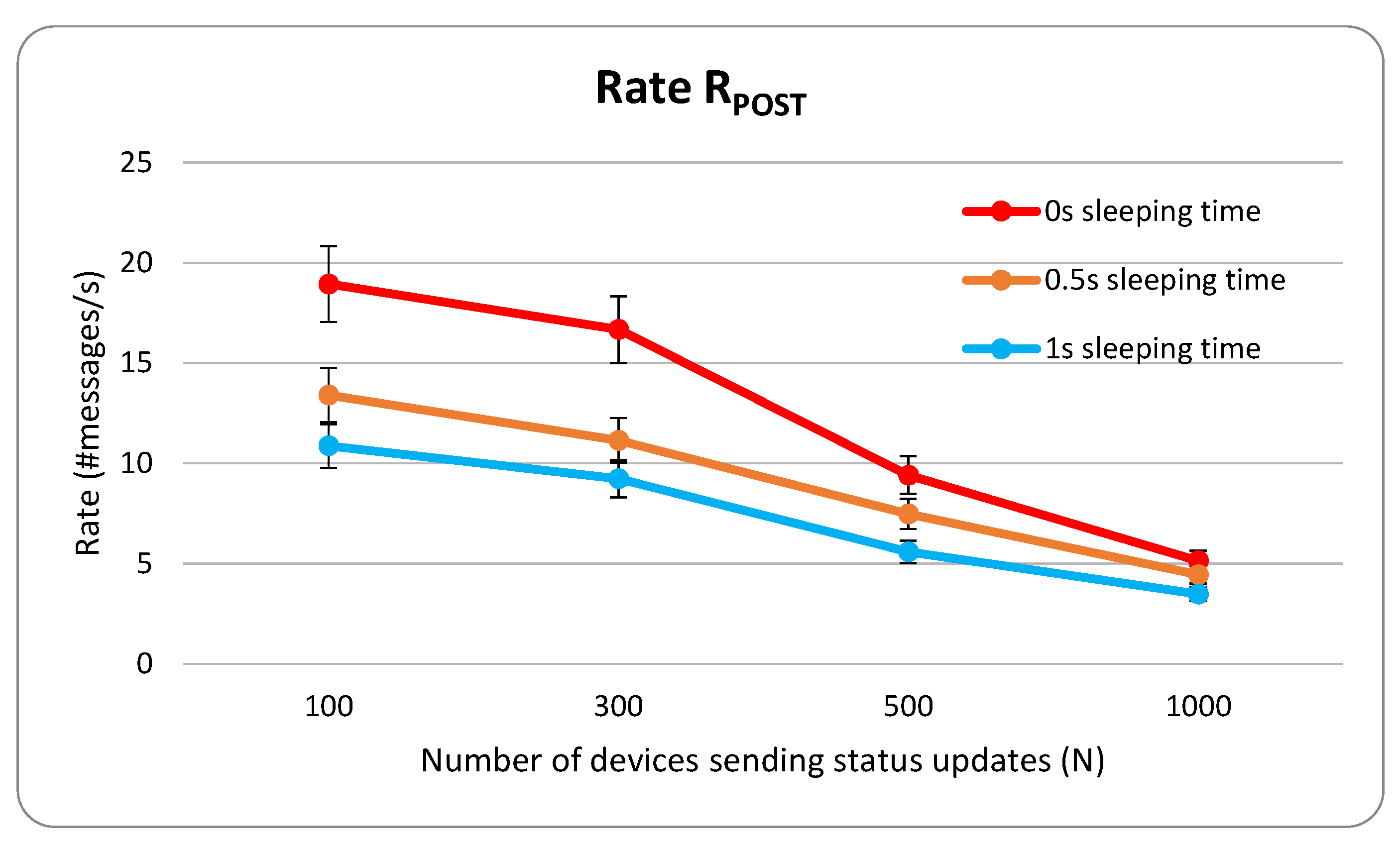
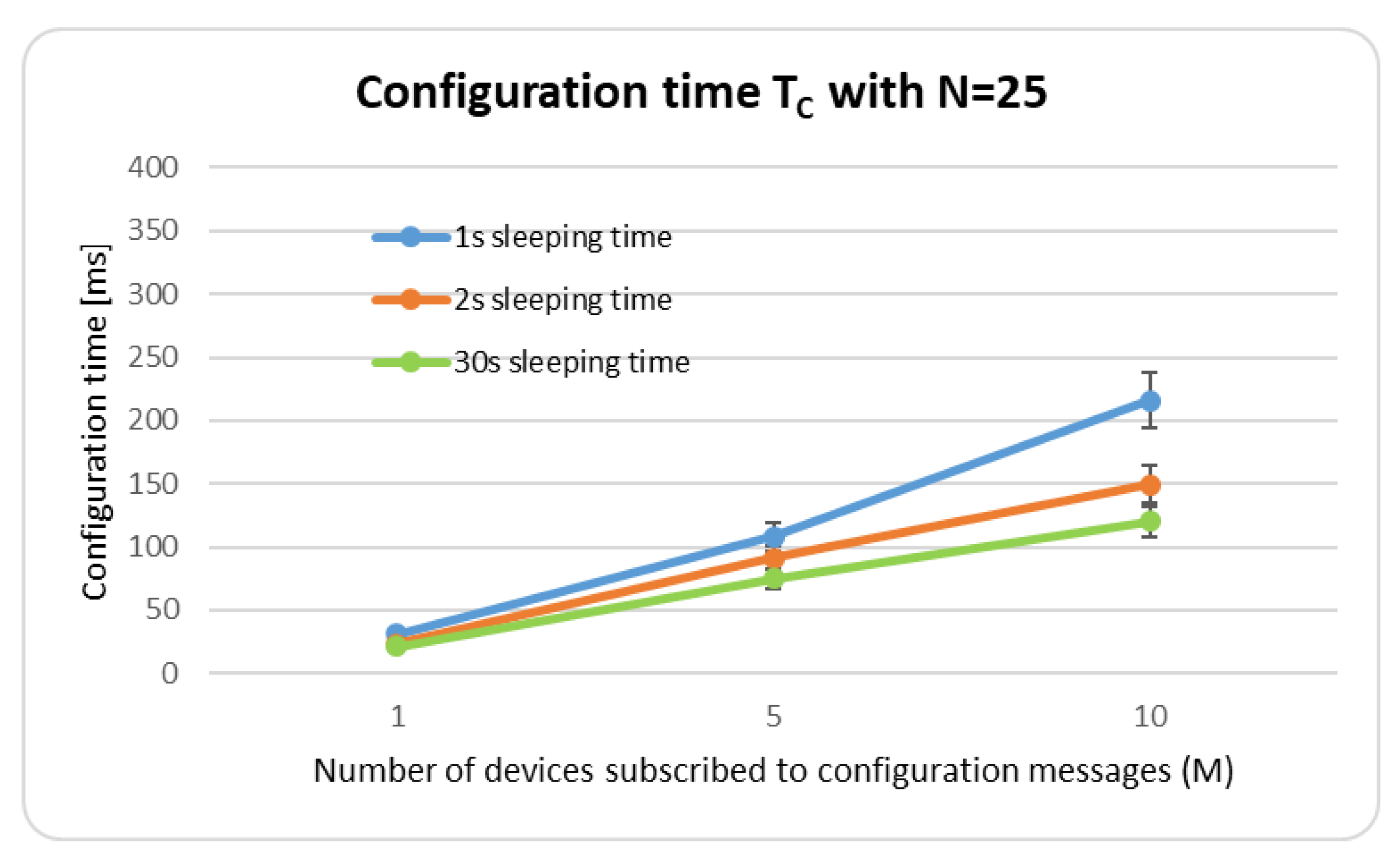
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Riccardi, E.; Gunning, P.; de Dios, O.G.; Quagliotti, M.; López, V.; Lord, A. An Operator view on the Introduction of White Boxes into Optical Networks. J. Light. Technol. 2018, 36, 3062–3072. [Google Scholar] [CrossRef]
- Sgambelluri, A.; Giorgetti, A.; Scano, D.; Cugini, F.; Paolucci, F. OpenConfig and OpenROADM Automation of Operational Modes in Disaggregated Optical Networks. IEEE Access 2020, 8, 190094–190107. [Google Scholar] [CrossRef]
- Sambo, N.; Cugini, F.; Sgambelluri, A.; Castoldi, P. Monitoring Plane Architecture and OAM Handler. J. Light. Technol. 2016, 34, 1939–1945. [Google Scholar] [CrossRef]
- Mayoral, A.; Vilalta, R.; Muñoz, R.; Casellas, R.; Martínez, R. Experimental validation of automatic lightpath establishment integrating OpenDayLight SDN controller and Active Stateful PCE within the ADRENALINE testbed. In Proceedings of the 2014 16th International Conference on Transparent Optical Networks (ICTON), Graz, Austria, 6–10 July 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Giorgetti, A.; Sgambelluri, A.; Casellas, R.; Morro, R.; Campanella, A.; Castoldi, P. Control of open and disaggregated transport networks using the Open Network Operating System (ONOS). IEEE/OSA J. Opt. Commun. Netw. 2020, 12, A171–A181. [Google Scholar] [CrossRef]
- Lopez, V.; de Dios, O.G.; Contreras, L.M.; Foster, J.; Silva, H.; Blair, L.; Marsella, J.; Szyrkowiec, T.; Autenrieth, A.; Fernández-Palacios, J.P.; et al. Demonstration of SDN orchestration in optical multi-vendor scenarios. In Proceedings of the 2015 IEEE Optical Fiber Communications Conference and Exhibition (OFC), Los Angeles, CA, USA, 22–26 March 2015; pp. 1–3. [Google Scholar]
- Paolucci, F.; Cugini, F.; Cecchetti, G.; Castoldi, P. Open Network Database for Application-Based Control in Multilayer Networks. J. Light. Technol. 2017, 35, 1469–1476. [Google Scholar] [CrossRef]
- OCEAN. Available online: http://www.iotocean.org/ (accessed on 20 August 2021).
- Yun, J.; Teja, R.C.; Chen, N.; Sung, N.; Kim, J. Interworking of oneM2M-based IoT systems and legacy systems for consumer products. In Proceedings of the 2016 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 19–21 October 2016; pp. 423–428. [Google Scholar] [CrossRef]
- Lucero, S. IoT Platforms: Enabling the Internet of Things; White Paper. 2016. Available online: https://cdn.ihs.com/www/pdf/enabling-IOT.pdf (accessed on 30 December 2021).
- Singh, K.J.; Kapoor, D.S. Create Your Own Internet of Things: A survey of IoT platforms. IEEE Consum. Electron. Mag. 2017, 6, 57–68. [Google Scholar] [CrossRef]
- Vermesan, O.; Bahr, R.; Falcitelli, M.; Brevi, D.; Bosi, I.; Dekusar, A.; Velizhev, A.; Alaya, M.B.; Firmani, C.; Simeon, J.F.; et al. IoT Technologies for Connected and Automated Driving Applications. In Internet of Things-The Call of the Edge: Everything Intelligent Everywhere; River Publishers: Aalborg, Denmark, 2020; pp. 255–306. [Google Scholar]
- Elbers, J.P.; Autenrieth, A. From static to software-defined optical networks. In Proceedings of the 2012 16th International Conference on Optical Network Design and Modelling (ONDM), Colchester, UK, 17–20 April 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Casellas, R.; Martinez, R.; Munoz, R.; Vilalta, R.; Liu, L. Control and orchestration of multidomain optical networks with GMPLS as inter-SDN controller communication [Invited]. J. Opt. Commun. Netw. 2015, 7, B46–B54. [Google Scholar] [CrossRef]
- Ramaswami, R.; Segall, A. Distributed network control for optical networks. IEEE/ACM Trans. Netw. 1997, 5, 936–943. [Google Scholar] [CrossRef]
- Liu, J.; Huang, S.; Zhou, Y.; Yin, S.; Zhao, Y.; Zhang, M.; Zhang, J.; Gu, W. Experimental validation of IP over Optical Transport Network based on Hierarchical Controlled Software Defined Networks Architecture. In Proceedings of the 2015 14th International Conference on Optical Communications and Networks (ICOCN), Nanjing, China, 3–5 July 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Suzuki, M.; Tsuritani, T. Management and control of transparent optical network considering physical impairments. In Proceedings of the 2009 11th International Conference on Transparent Optical Networks, Ponta Delgada, Portugal, 28 June–2 July 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Paolucci, F.; Castro, A.; Fresi, F.; Imran, M.; Giorgetti, A.; Bhownik, B.B.; Berrettini, G.; Meloni, G.; Cugini, F.; Velasco, L.; et al. Active PCE demonstration performing elastic operations and hitless defragmentation in flexible grid optical networks. Photonic Netw. Commun. 2015, 29, 57–66. [Google Scholar] [CrossRef]
- Channegowda, M.; Nejabati, R.; Simeonidou, D. Software-defined optical networks technology and infrastructure: Enabling software-defined optical network operations [invited]. J. Opt. Commun. Netw. 2013, 5, A274–A282. [Google Scholar] [CrossRef]
- Kundrát, J.; Campanella, A.; Rouzic, E.L.; Ferrari, A.; Havliš, O.; Hažlinský, M.; Grammel, G.; Galimberti, G.; Curri, V. Physical-Layer Awareness: GNPy and ONOS for End-to-End Circuits in Disaggregated Networks. In Proceedings of the 2020 Optical Fiber Communications Conference and Exhibition (OFC), San Diego, CA, USA, 8–10 March 2020; pp. 1–3. [Google Scholar]
- Fattah, S.M.M.; Sung, N.M.; Ahn, I.Y.; Ryu, M.; Yun, J. Building IoT Services for Aging in Place Using Standard-Based IoT Platforms and Heterogeneous IoT Products. Sensors 2017, 17, 2311. [Google Scholar] [CrossRef] [PubMed]
- S Rubí, J.N.; L Gondim, P.R. IoMT Platform for Pervasive Healthcare Data Aggregation, Processing, and Sharing Based on OneM2M and OpenEHR. Sensors 2019, 19, 4283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, S.; Lee, M.; Shin, C. IoT-Based Strawberry Disease Prediction System for Smart Farming. Sensors 2018, 18, 4051. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeong, S.; Kim, S.; Kim, J. City Data Hub: Implementation of Standard-Based Smart City Data Platform for Interoperability. Sensors 2020, 20, 7000. [Google Scholar] [CrossRef] [PubMed]
- Yun, J.; Ahn, I.Y.; Song, J.; Kim, J. Implementation of Sensing and Actuation Capabilities for IoT Devices Using oneM2M Platforms. Sensors 2019, 19, 4567. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Araújo, P.; Santos, A.; Costa, A.; Goncalves, F.; Ribeiro, B.; Hapanchak, V.; Gama, O.; Dias, B.; Macedo, J.; João Nicolau, M. Performance Analysis of Two Machine-to-Machine Architecture Types in Vehicular Communications. In Proceedings of the 2019 IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Washington, DC, USA, 10–12 June 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Choi, S.C.; Ahn, I.Y.; Park, J.H.; Kim, J. Towards Real-Time Data Delivery in oneM2M Platform for UAV Management System. In Proceedings of the 2019 International Conference on Electronics, Information, and Communication (ICEIC), Auckland, New Zealand, 22–25 January 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Swetina, J.; Lu, G.; Jacobs, P.; Ennesser, F.; Song, J. Toward a standardized common M2M service layer platform: Introduction to oneM2M. IEEE Wirel. Commun. 2014, 21, 20–26. [Google Scholar] [CrossRef]
- OneM2M Sets Standards for the Internet of Things & M2M. Available online: https://www.onem2m.org (accessed on 12 November 2021).
- OneM2M Requirements. Available online: https://onem2m.org/technical/published-specifications/release-2/TS-0002-Requirements-V2_10_2.DOCX (accessed on 22 November 2021).
- OneM2M Functional Architecture. Available online: https://onem2m.org/technical/published-specifications/release-2/TS-0001-Functional_Architecture-V2_30_0.ZIP (accessed on 22 November 2021).
- OneM2M Protocol Binding. Available online: https://onem2m.org/technical/published-specifications/release-2/TS-0009-HTTP_Protocol_Binding-V2_19_0.ZIP (accessed on 22 November 2021).
- Open ROADM. Available online: http://openroadm.org/ (accessed on 24 November 2021).
- Mobius—OCEAN DEVELOPERS. Available online: http://developers.iotocean.org/archives/module/mobius (accessed on 12 November 2021).
- Schiano, M.; Percelsi, A.; Quagliotti, M. Flexible Node Architectures for Metro Networks. J. Opt. Commun. Netw. 2015, 7, B131–B140. [Google Scholar] [CrossRef]
- Pavon-Marino, P.; Moreno-Muro, F.J.; Garrich, M.; Quagliotti, M.; Riccardi, E.; Rafel, A.; Lord, A. Techno-Economic Impact of Filterless Data Plane and Agile Control Plane in the 5G Optical Metro. J. Light. Technol. 2020, 38, 3801–3814. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sleeping Time | 25th Percentile | 50th Percentile | 75th Percentile |
|---|---|---|---|
| 0 s | 8.347222222 | 13.04166667 | 17.23611111 |
| 0.5 s | 6.719097222 | 9.310833333 | 11.70861111 |
| 1 s | 5.062430556 | 7.410694444 | 9.640625 |
| Sleeping Time | 25th Percentile | 50th Percentile | 75th Percentile |
|---|---|---|---|
| 1 s | 69.5 | 108 | 162 |
| 2 s | 57 | 91 | 120 |
| 30 s | 48 | 75 | 97.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Troscia, M.; Sgambelluri, A.; Paolucci, F.; Castoldi, P.; Pagano, P.; Cugini, F. Scalable OneM2M IoT Open-Source Platform Evaluated in an SDN Optical Network Controller Scenario. Sensors 2022, 22, 431. https://0-doi-org.brum.beds.ac.uk/10.3390/s22020431
Troscia M, Sgambelluri A, Paolucci F, Castoldi P, Pagano P, Cugini F. Scalable OneM2M IoT Open-Source Platform Evaluated in an SDN Optical Network Controller Scenario. Sensors. 2022; 22(2):431. https://0-doi-org.brum.beds.ac.uk/10.3390/s22020431
Chicago/Turabian StyleTroscia, Martina, Andrea Sgambelluri, Francesco Paolucci, Piero Castoldi, Paolo Pagano, and Filippo Cugini. 2022. "Scalable OneM2M IoT Open-Source Platform Evaluated in an SDN Optical Network Controller Scenario" Sensors 22, no. 2: 431. https://0-doi-org.brum.beds.ac.uk/10.3390/s22020431