
fNIRS-Based Upper Limb Motion Intention Recognition Using an Artificial Neural Network for Transhumeral Amputees

 ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
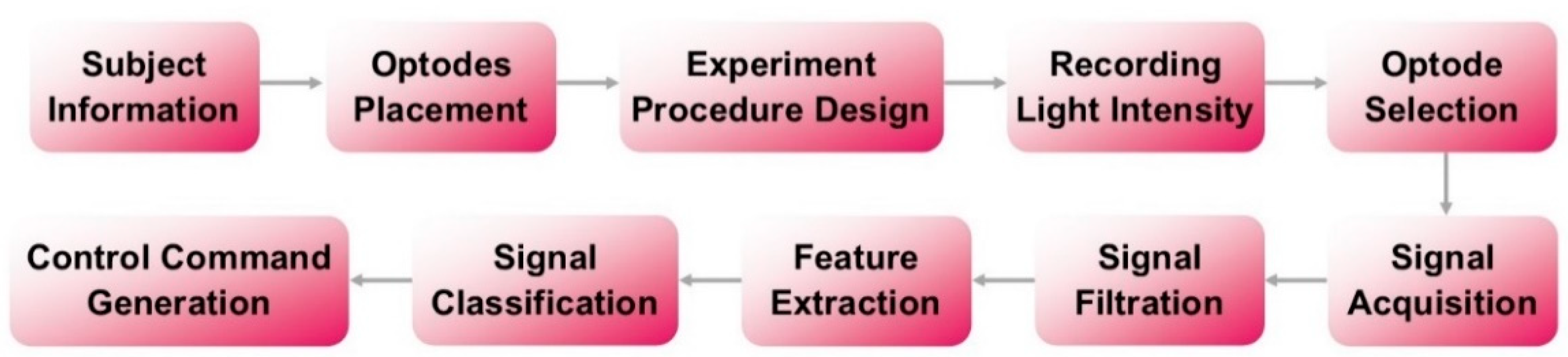
2. Materials and Methods
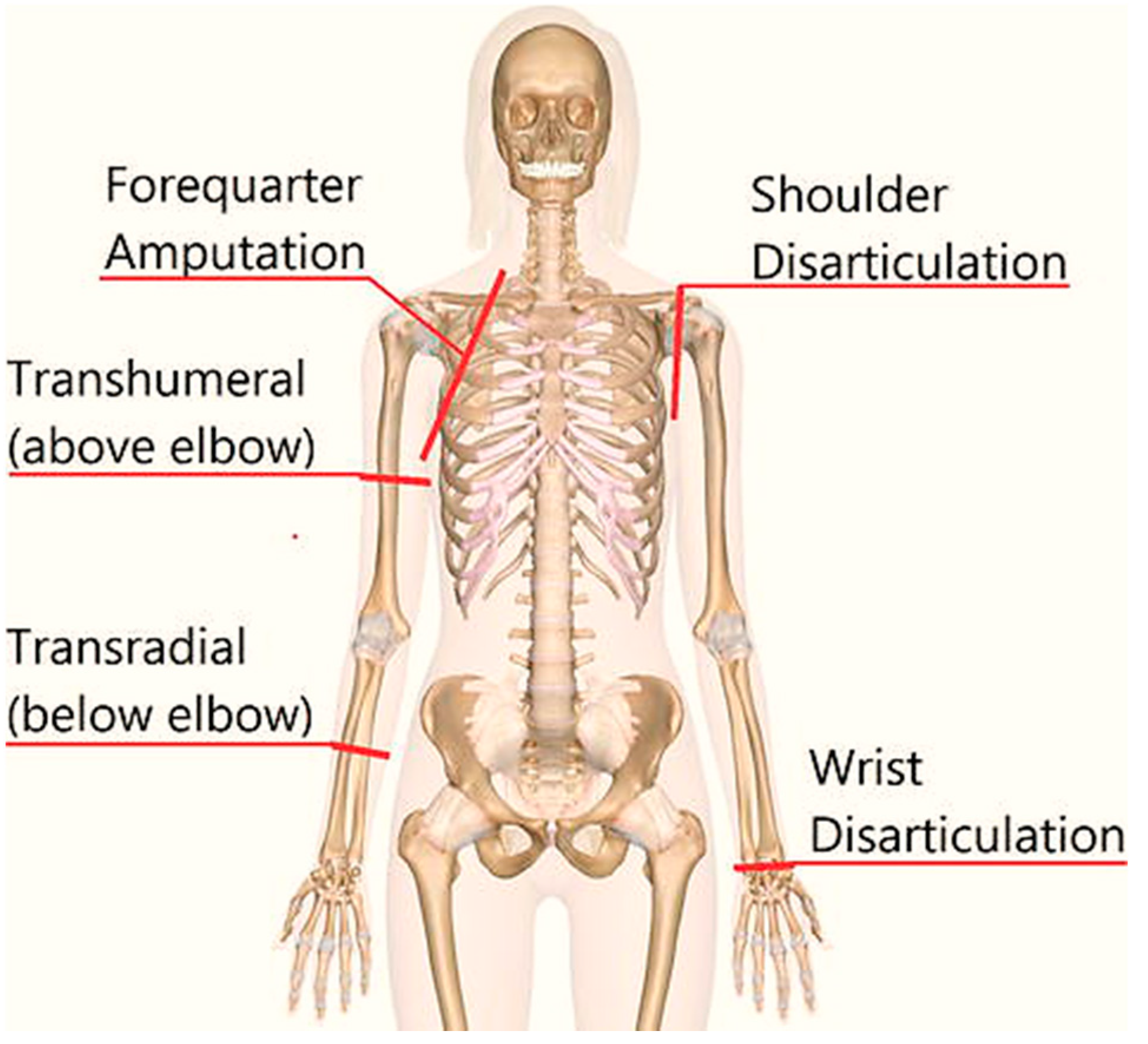
2.1. Subject Information
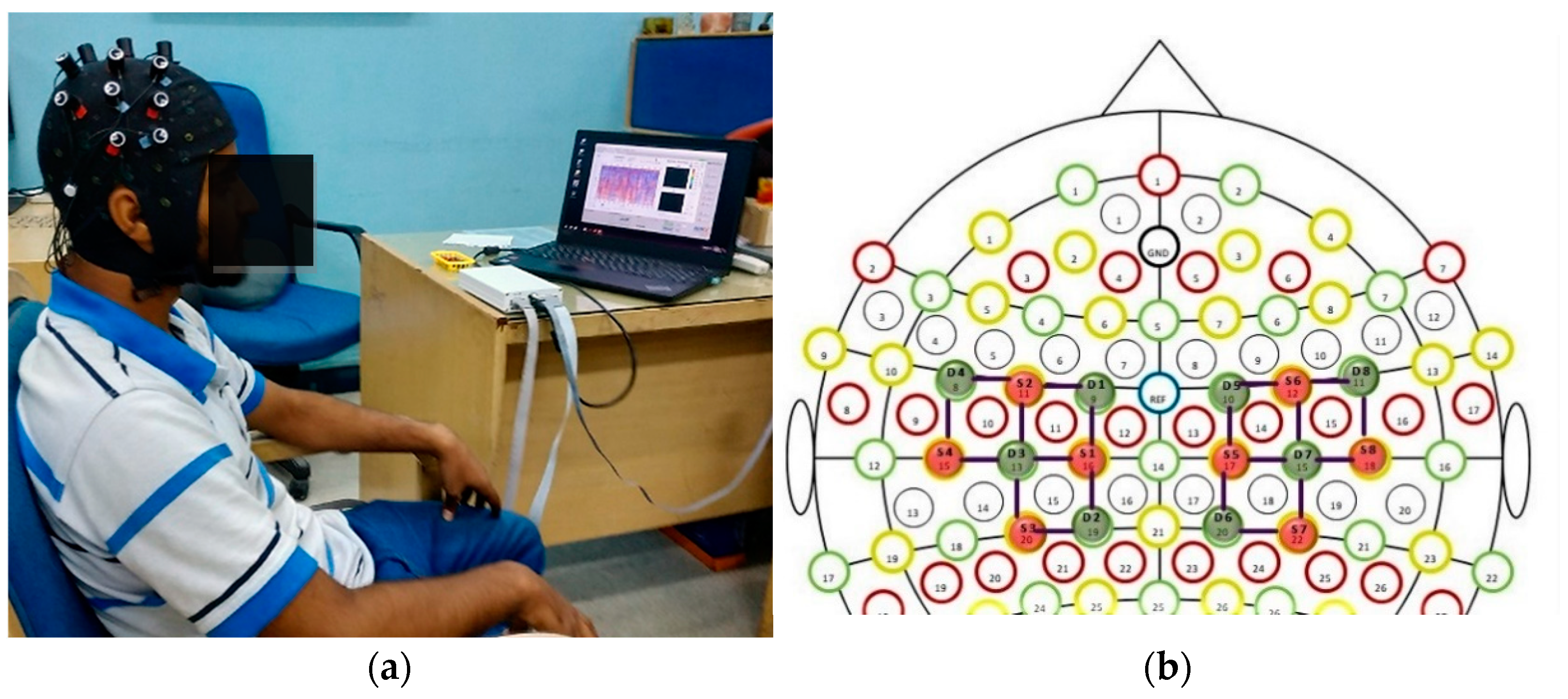
2.2. Optode Placement
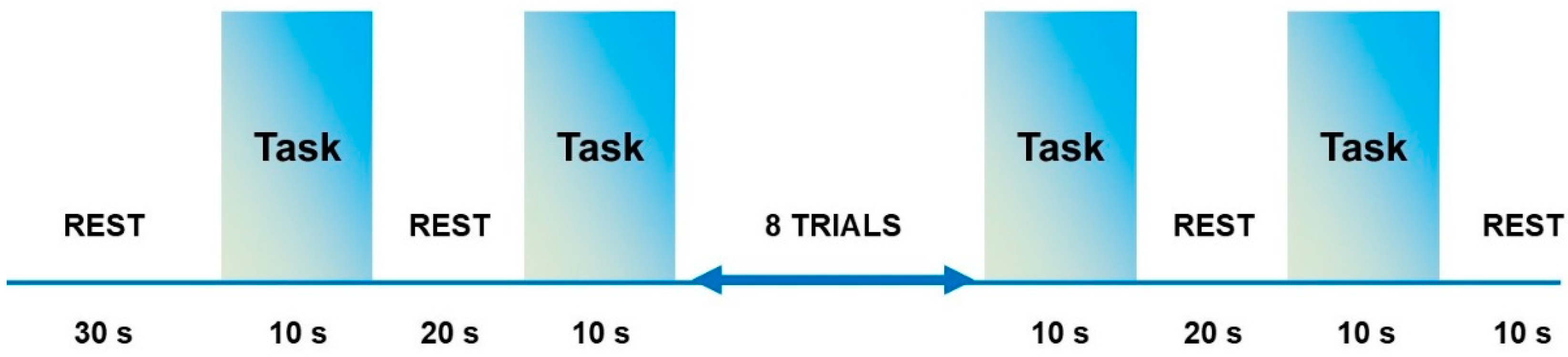
2.3. Experimental Procedure
2.4. Data Acquisition and Processing
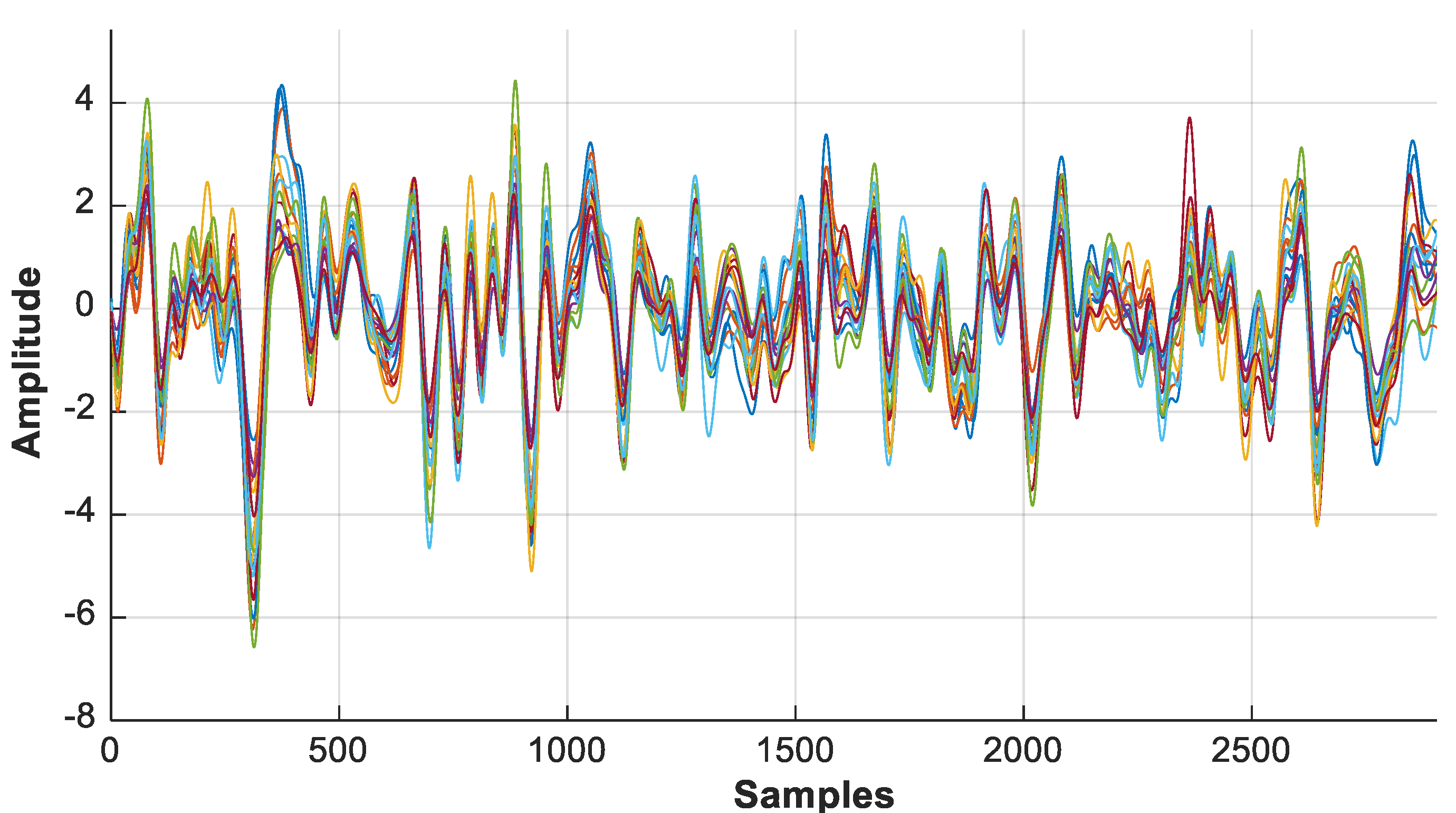
2.4.1. Signal Acquisition
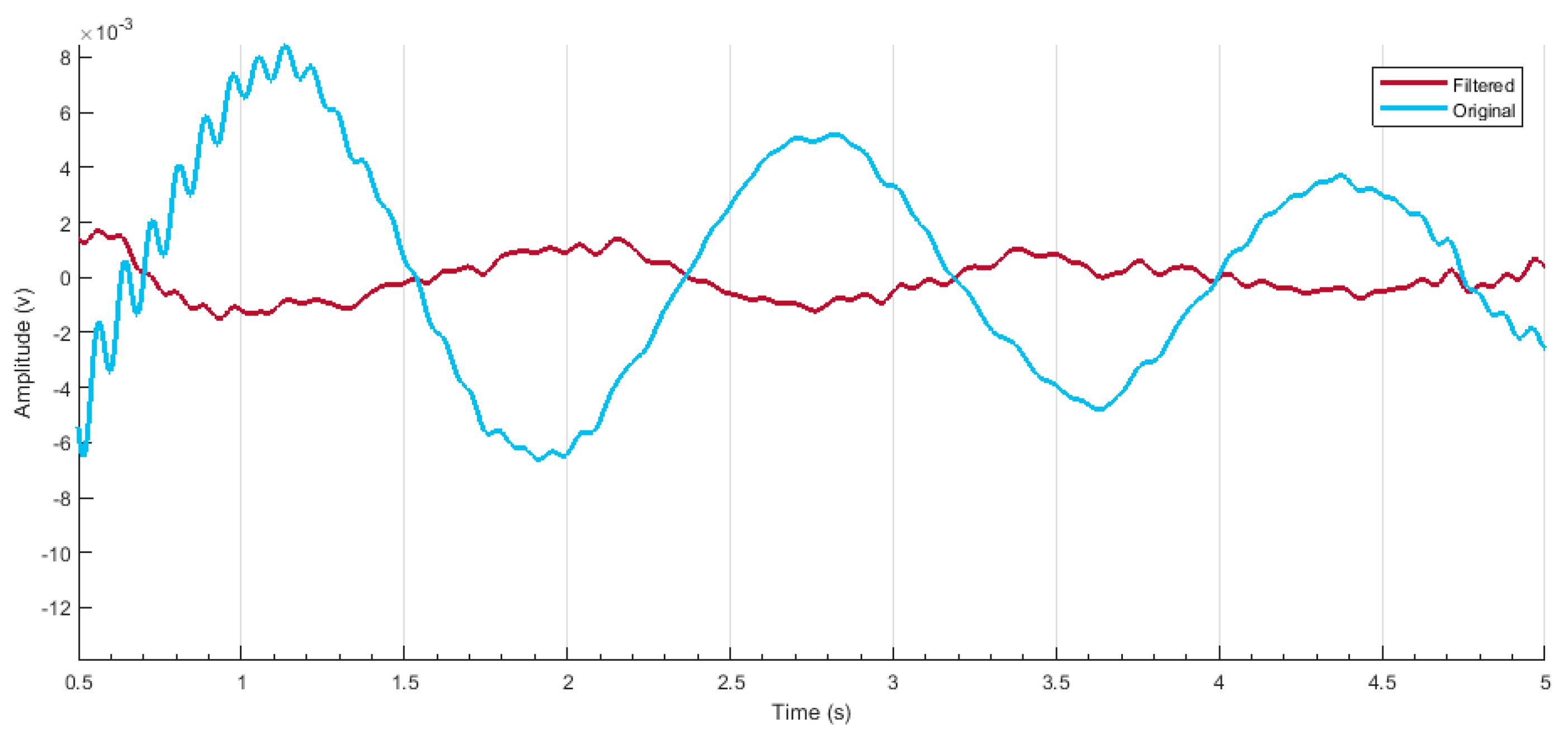
2.4.2. Signal Processing
3. Feature Extraction and Classification of Motion Intention Signals
3.1. Feature Extraction
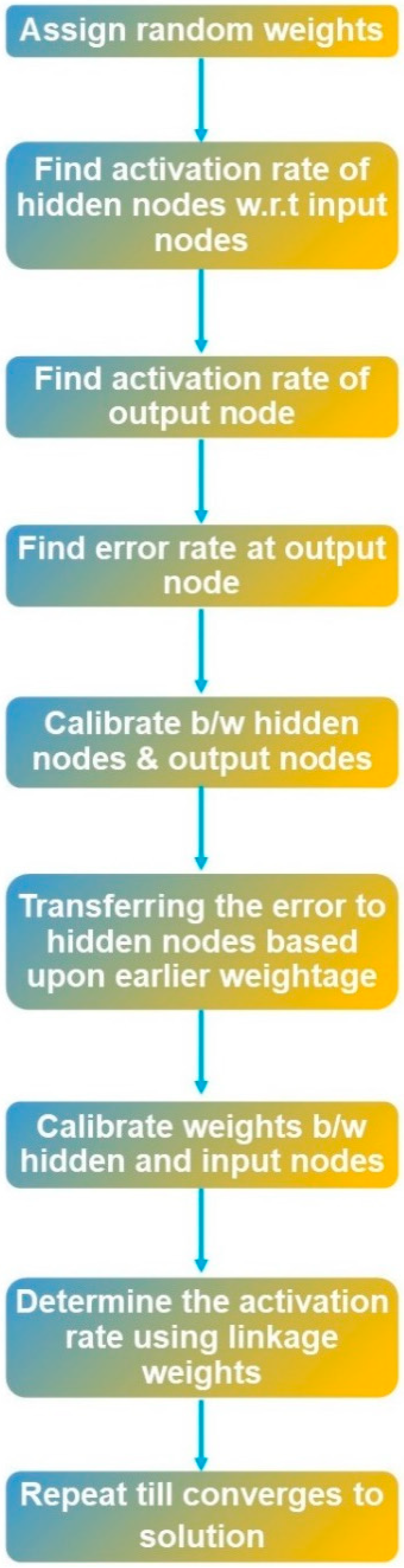
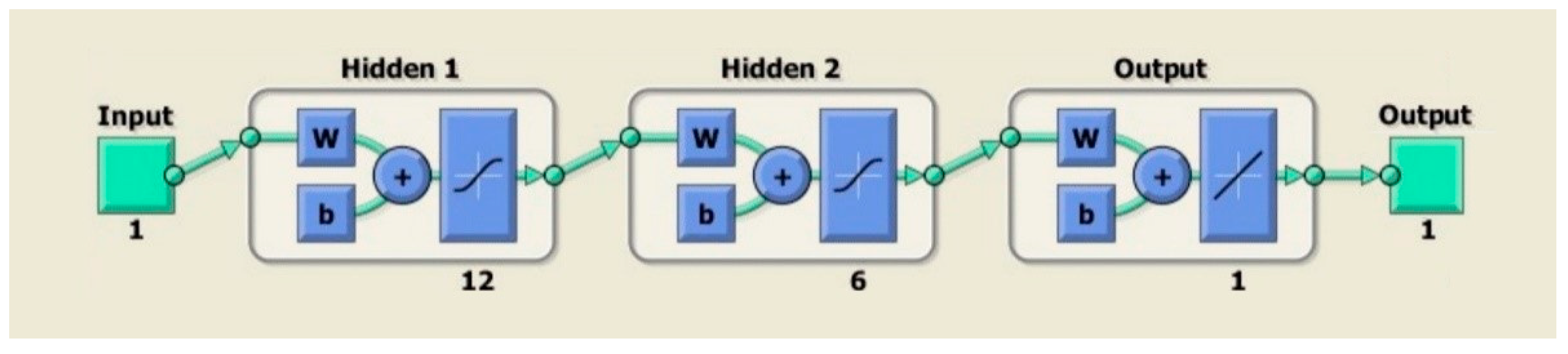
3.2. Artificial Neural Network (ANN)
4. Results and Discussion
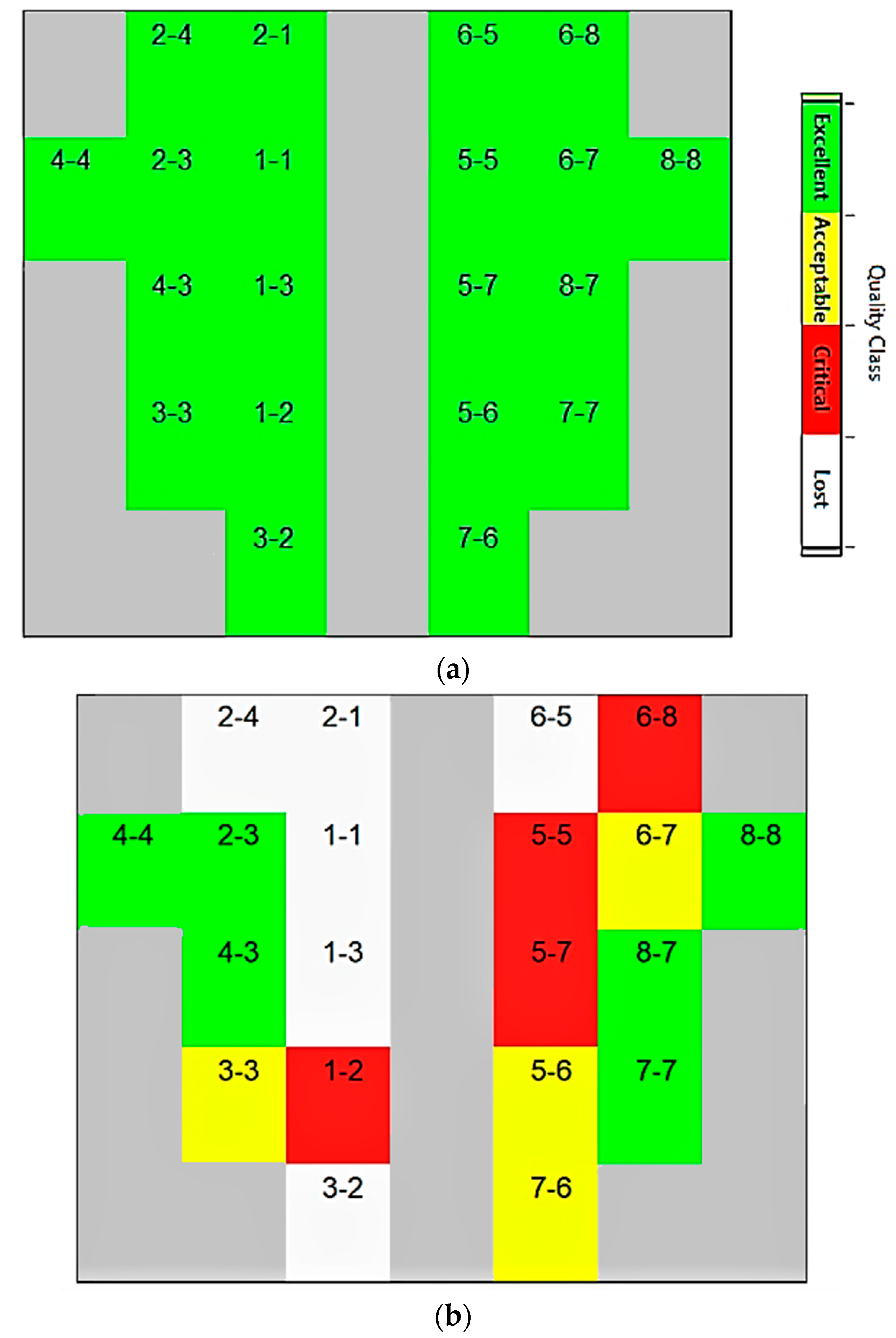
4.1. Channel Selection
4.2. Motion Classification Accuracy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cordella, F.; Ciancio, A.L.; Sacchetti, R.; Davalli, A.; Cutti, A.G.; Guglielmelli, E.; Zollo, L. Literature Review on Needs of Upper Limb Prosthesis Users. Front. Neurosci. 2016, 10, 209. [Google Scholar] [CrossRef]
- Ribeiro, J.; Mota, F.; Cavalcante, T.; Nogueira, I.; Gondim, V.; Albuquerque, V.; Alexandria, A. Analysis of Man-Machine Interfaces in Upper-Limb Prosthesis: A Review. Robotics 2019, 8, 16. [Google Scholar] [CrossRef] [Green Version]
- Hussain, S.; Shams, S.; Khan, S.J. Impact of Medical Advancement: Prostheses. In Computer Architecture in Industrial, Biomechanical and Biomedical Engineering; IntechOpen: London, UK, 2019. [Google Scholar] [CrossRef] [Green Version]
- Neelum, Y.S.; Kausar, Z.; Usama, S.A. Reference position estimation for prosthetic elbow and wrist using EMG signals. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 635, p. 012031. [Google Scholar] [CrossRef]
- Resnik, L.; Klinger, S.L.; Etter, K. The DEKA Arm: Its features, functionality, and evolution during the Veterans Affairs Study to optimize the DEKA Arm. Prosthet. Orthot. Int. 2014, 38, 492–504. [Google Scholar] [CrossRef] [Green Version]
- Lenzi, T.; Lipsey, J.; Sensinger, J.W. The RIC Arm—A Small Anthropomorphic Transhumeral Prosthesis. IEEE/ASME Trans. Mechatron. 2016, 21, 2660–2671. [Google Scholar] [CrossRef]
- Islam, M.A.; Sundaraj, K.; Ahmad, R.B.; Ahamed, N.U.; Ali, M.A. Mechanomyography sensor development, related signal processing, and applications: A systematic review. IEEE Sens. J. 2013, 13, 2499–2516. [Google Scholar] [CrossRef]
- Bennett, D.A.; Goldfarb, M. IMU-Based Wrist Rotation Control of a Transradial Myoelectric Prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 26, 419–427. [Google Scholar] [CrossRef] [PubMed]
- Syed, U.A.; Kausar, Z.; Sattar, N.Y. Control of a Prosthetic Arm Using fNIRS, a Neural-Machine Interface. In Data Acquisition-Recent Advances and Applications in Biomedical Engineering; IntechOpen: London, UK, 2020. [Google Scholar]
- Alshammary, N.A.; Bennett, D.A.; Goldfarb, M. Synergistic Elbow Control for a Myoelectric Transhumeral Prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 26, 468–476. [Google Scholar] [CrossRef]
- Sattar, N.Y.; Syed, U.A.; Muhammad, S.; Kausar, Z. Real-Time EMG Signal Processing with Implementation of PID Control for Upper-Limb Prosthesis. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 120–125. [Google Scholar] [CrossRef]
- Jarrassé, N.; Nicol, C.; Touillet, A.; Richer, F.; Martinet, N.; Paysant, J.; de Graaf, J.B. Classification of phantom finger, hand, wrist, and elbow voluntary gestures in transhumeral amputees with sEMG. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 71–80. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oda, Y.; Sato, T.; Nambu, I.; Wada, Y. Real-Time Reduction of Task-Related Scalp-Hemodynamics Artifact in Functional Near-Infrared Spectroscopy with Sliding-Window Analysis. Appl. Sci. 2018, 8, 149. [Google Scholar] [CrossRef] [Green Version]
- Yamada, Y.; Suzuki, H.; Yamashita, Y. Time-Domain Near-Infrared Spectroscopy and Imaging: A Review. Appl. Sci. 2019, 9, 1127. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Samuel, O.W.; Zhang, X.; Wang, H.; Fang, P.; Li, G. A motion-classification strategy based on sEMG-EEG signal combination for upper-limb amputees. J. Neuroeng. Rehabil. 2017, 14, 3. [Google Scholar] [CrossRef] [Green Version]
- Bonilauri, A.; Intra, F.S.; Pugnetti, L.; Baselli, G.; Baglio, F. A Systematic Review of Cerebral Functional Near-Infrared Spectroscopy in Chronic Neurological Diseases—Actual Applications and Future Perspectives. Diagnostics 2020, 10, 581. [Google Scholar] [CrossRef]
- Banville, H.; Falk, T. Recent advances and open challenges in hybrid brain-computer interfacing: A technological review of non-invasive human research. Brain-Comput. Interfaces 2016, 3, 9–46. [Google Scholar] [CrossRef]
- Yao, L.; Meng, J.; Zhang, D.; Sheng, X.; Zhu, X. Combining Motor Imagery with Selective Sensation toward a Hybrid-Modality BCI. IEEE Trans. Biomed. Eng. 2013, 61, 2304–2312. [Google Scholar] [CrossRef]
- Herold, F.; Wiegel, P.; Scholkmann, F.; Müller, N.G. Applications of functional near-infrared spectroscopy (fNIRS) neuroimaging in Exercise–Cognition science: A systematic, Methodology-Focused review. J. Clin. Med. 2018, 7, 466. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jian, C.; Deng, L.; Liang, L.; Luo, J.; Wang, X.; Song, R. Neuromuscular Control of the Agonist–Antagonist Muscle Coordination Affected by Visual Dimension: An EMG-fNIRS Study. IEEE Access 2020, 8, 100768–100777. [Google Scholar] [CrossRef]
- Abitan, H.; Bohr, H.; Buchhave, P. Correction to the Beer-Lambert-Bouguer law for optical absorption. Appl. Opt. 2008, 47, 5354–5357. [Google Scholar] [CrossRef]
- Herold, F.; Wiegel, P.; Scholkmann, F.; Thiers, A.; Hamacher, D.; Schega, L. Functional near-infrared spectroscopy in movement science: A systematic review on cortical activity in postural and walking tasks. Neurophotonics 2017, 4, 041403. [Google Scholar] [CrossRef] [Green Version]
- Pfeifer, M.D.; Scholkmann, F.; Labruyère, R. Signal Processing in Functional Near-Infrared Spectroscopy (fNIRS): Methodological Differences Lead to Different Statistical Results. Front. Hum. Neurosci. 2018, 11, 641. [Google Scholar] [CrossRef] [Green Version]
- Phinyomark, A.; Scheme, E. A feature extraction issue for myoelectric control based on wearable EMG sensors. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Farina, D.; Merletti, R.; Enoka, R.M. The extraction of neural strategies from the surface EMG. J. Appl. Physiol. 2004, 96, 1486–1495. [Google Scholar] [CrossRef] [Green Version]
- Scholkmann, F.; Wolf, M. Measuring brain activity using functional near infrared spectroscopy: A short review. Spectrosc. Eur. 2012, 24, 6. [Google Scholar]
- Rocon, E.; Gallego, J.A.; Barrios, L.; Victoria, A.R.; Ibánez, J.; Farina, D.; Negro, F.; Dideriksen, J.L.; Conforto, S.; D’Alessio, T.; et al. Multimodal BCI-mediated FES suppression of pathological tremor. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3337–3340. [Google Scholar]
- Pinti, P.; Aichelburg, C.; Gilbert, S.; Hamilton, A.; Hirsch, J.; Burgess, P.; Tachtsidis, I. A Review on the Use of Wearable Functional Near-Infrared Spectroscopy in Naturalistic Environments. Jpn. Psychol. Res. 2018, 60, 347–373. [Google Scholar] [CrossRef] [Green Version]
- Lloyd-Fox, S.; Blasi, A.; Elwell, C. Illuminating the developing brain: The past, present and future of functional near infrared spectroscopy. Neurosci. Biobehav. Rev. 2010, 34, 269–284. [Google Scholar] [CrossRef] [PubMed]
- World Medical Association. WMA Declaration of Helsinski–Ethical Principles for Medical Research Involving Human Subjects. JAMA 2013, 310, 2191–2194. [Google Scholar] [CrossRef] [Green Version]
- Leeb, R.; Sagha, H.; Chavarriaga, R. Multimodal fusion of muscle and brain signals for a hybrid-BCI. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 4343–4346. [Google Scholar]
- Buccino, A.P.; Keles, H.O.; Omurtag, A. Hybrid EEG-fNIRS asynchronous brain-computer interface for multiple motor tasks. PLoS ONE 2016, 11, e0146610. [Google Scholar]
- Ortega, P.; Zhao, T.; Faisal, A.A. HYGRIP: Full-Stack Characterization of Neurobehavioral Signals (fNIRS, EEG, EMG, Force, and Breathing) During a Bimanual Grip Force Control Task. Front. Neurosci. 2020, 14, 919. [Google Scholar] [CrossRef]
- Aryadoust, V.; Foo, S.; Ng, L.Y. What can gaze behaviors, neuroimaging data, and test scores tell us about test method effects and cognitive load in listening assessments? Lang. Test. 2021, 39, 56–89. [Google Scholar] [CrossRef]
- Maira, G.; Chiarelli, A.M.; Brafa, S.; Libertino, S.; Fallica, G.; Merla, A.; Lombardo, S. Imaging System Based on Silicon Photomultipliers and Light Emitting Diodes for Functional Near-Infrared Spectroscopy. Appl. Sci. 2020, 10, 1068. [Google Scholar] [CrossRef] [Green Version]
- Ramadan, R.A.; Vasilakos, A.V. Brain computer interface: Control signals review. Neurocomputing 2017, 223, 26–44. [Google Scholar] [CrossRef]
- Kim, M. Shedding Light on the Human Brain. Opt. Photon-News 2021, 32, 26–33. [Google Scholar] [CrossRef]
- Geissler, C.F.; Schneider, J.; Frings, C. Shedding light on the prefrontal correlates of mental workload in simulated driving: A functional near-infrared spectroscopy study. Sci. Rep. 2021, 11, 705. [Google Scholar] [CrossRef] [PubMed]
- Lamberti, N.; Manfredini, F.; Baroni, A.; Crepaldi, A.; Lavezzi, S.; Basaglia, N.; Straudi, S. Motor Cortical Activation Assessment in Progressive Multiple Sclerosis Patients Enrolled in Gait Rehabilitation: A Secondary Analysis of the RAGTIME Trial Assisted by Functional Near-Infrared Spectroscopy. Diagnostics 2021, 11, 1068. [Google Scholar] [CrossRef]
- Guo, W.; Sheng, X.; Liu, H.; Zhu, X. Toward an Enhanced Human–Machine Interface for Upper-Limb Prosthesis Control With Combined EMG and NIRS Signals. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 564–575. [Google Scholar] [CrossRef]
- Feng, N.; Hu, F.; Wang, H.; Gouda, M.A. Decoding of voluntary and involuntary upper-limb motor imagery based on graph fourier transform and cross-frequency coupling coefficients. J. Neural Eng. 2020, 17, 056043. [Google Scholar] [CrossRef] [PubMed]
- Leff, D.; Orihuela-Espina, F.; Elwell, C.; Athanasiou, T.; Delpy, D.T.; Darzi, A.W.; Yang, G.-Z. Assessment of the cerebral cortex during motor task behaviours in adults: A systematic review of functional near infrared spectroscopy (fNIRS) studies. NeuroImage 2011, 54, 2922–2936. [Google Scholar] [CrossRef]
- Borrell, J.A.; Copeland, C.; Lukaszek, J.L.; Fraser, K.; Zuniga, J.M. Use-Dependent Prosthesis Training Strengthens Contralateral Hemodynamic Brain Responses in a Young Adult with Upper Limb Reduction Deficiency: A Case Report. Front. Neurosci. 2021, 15, 693138. [Google Scholar] [CrossRef]
- Matarasso, A.K.; Rieke, J.D.; White, K.; Yusufali, M.M.; Daly, J.J. Combined real-time fMRI and real time fNIRS brain computer interface (BCI): Training of volitional wrist extension after stroke, a case series pilot study. PLoS ONE 2021, 16, e0250431. [Google Scholar] [CrossRef]
- Luo, J.; Shi, W.; Lu, N.; Wang, J.; Chen, H.; Wang, Y.; Lu, X.; Wang, X.; Hei, X. Improving the performance of multisubject motor imagery-based BCIs using twin cascaded softmax CNNs. J. Neural Eng. 2021, 18, 036024. [Google Scholar] [CrossRef]
- Ang, K.K.; Guan, C.; Chua, K.S.G.; Ang, B.T.; Kuah, C.; Wang, C.; Phua, K.S.; Chin, Z.Y.; Zhang, H. A clinical study of motor imagery-based brain-computer interface for upper limb robotic rehabilitation. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 5981–5984. [Google Scholar] [CrossRef]
- Wen, Y.; Avrillon, S.; Hernandez-Pavon, J.C.; Kim, S.J.; Hug, F.; Pons, J.L. A convolutional neural network to identify motor units from high-density surface electromyography signals in real time. J. Neural Eng. 2021, 18, 056003. [Google Scholar] [CrossRef]
- Prôa, R.; Balardin, J.; de Faria, D.D.; Paulo, A.M.; Sato, J.R.; Baltazar, C.A.; Borges, V.; Silva, S.M.C.A.; Ferraz, H.B.; Aguiar, P.D.C. Motor Cortex Activation During Writing in Focal Upper-Limb Dystonia: An fNIRS Study. Neurorehabilit. Neural Repair 2021, 35, 729–737. [Google Scholar] [CrossRef]
- Li, G.; Yuan, Y.; Ren, H.; Chen, W. fNIRS study of effects of foot bath on human brain and cognitive function. J. Mech. Med. Biol. 2021, 21, 2140022. [Google Scholar] [CrossRef]
- Gusnard, D.A.; Raichle, M.E. Searching for a baseline: Functional imaging and the resting human brain. Nat. Rev. Neurosci. 2001, 2, 685–694. [Google Scholar] [CrossRef] [PubMed]
- Gomez-Gil, J.; San-Jose-Gonzalez, I.; Nicolas-Alonso, L.F.; Alonso-Garcia, S. Steering a Tractor by Means of an EMG-Based Human-Machine Interface. Sensors 2011, 11, 7110–7126. [Google Scholar] [CrossRef] [Green Version]
- Sitaram, R.; Zhang, H.; Guan, C.; Thulasidas, M.; Hoshi, Y.; Ishikawa, A.; Shimizu, K.; Birbaumer, N. Temporal classification of multichannel near-infrared spectroscopy signals of motor imagery for developing a brain–computer interface. NeuroImage 2007, 34, 1416–1427. [Google Scholar] [CrossRef]
- Zimmermann, R.; Marchal-Crespo, L.; Edelmann, J.; Lambercy, O.; Fluet, M.C.; Riener, R.; Wolf, M.; Gassert, R. Detection of motor execution using a hybrid fNIRS-biosignal BCI: A feasibility study. J. Neuroeng. Rehabil. 2013, 10, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoo, S.-H.; Santosa, H.; Kim, C.-S.; Hong, K.-S. Decoding Multiple Sound-Categories in the Auditory Cortex by Neural Networks: An fNIRS Study. Front. Hum. Neurosci. 2021, 15, 211. [Google Scholar] [CrossRef]
- Vélez-Guerrero, M.; Callejas-Cuervo, M.; Mazzoleni, S. Artificial Intelligence-Based Wearable Robotic Exoskeletons for Upper Limb Rehabilitation: A Review. Sensors 2021, 21, 2146. [Google Scholar] [CrossRef]
- Medina, F.; Perez, K.; Cruz-Ortiz, D.; Ballesteros, M.; Chairez, I. Control of a hybrid upper-limb orthosis device based on a data-driven artificial neural network classifier of electromyography signals. Biomed. Signal Process. Control. 2021, 68, 102624. [Google Scholar] [CrossRef]
- Holtzer, R.; Verghese, J.; Allali, G.; Izzetoglu, M.; Wang, C.; Mahoney, J.R. Neurological Gait Abnormalities Moderate the Functional Brain Signature of the Posture First Hypothesis. Brain Topogr. 2015, 29, 334–343. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, Y.; Li, W.; Bi, N.; Lv, Z. Adolescents Environmental Emotion Perception by Integrating EEG and Eye Movements. Front. Neurorobotics 2019, 13, 46. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fazli, S.; Mehnert, J.; Steinbrink, J.; Curio, G.; Villringer, A.; Mueller, K.-R.; Blankertz, B. Enhanced performance by a hybrid NIRS–EEG brain computer interface. NeuroImage 2011, 59, 519–529. [Google Scholar] [CrossRef] [PubMed]
- Witkowski, M.; Cortese, M.; Cempini, M.; Mellinger, J.; Vitiello, N.; Soekadar, S.R. Enhancing brain-machine interface (BMI) control of a hand exoskeleton using electrooculography (EOG). J. Neuron. Rehabil. 2014, 11, 165. [Google Scholar] [CrossRef] [PubMed] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amputee Title | A1 | A2 | A3 |
|---|---|---|---|
| Gender | Male | Male | Male |
| Age | 23 | 32 | 42 |
| Amputated Side | Right | Left | Right |
| Residual Limb Length | 14 cm | 18 cm | 10 cm |
| Time since Amputation | 7 Months | 24 Months | 145 Months |
| Features | S1 | S2 | S3 | S4 | S5 |
|---|---|---|---|---|---|
| SM | 72.88 | 61.1 | 74.89 | 68.63 | 69.63 |
| SP | 67.85 | 68.89 | 76.9 | 69.03 | 70.03 |
| SMin | 74.99 | 63.84 | 73.49 | 68.13 | 69.13 |
| S6 | S7 | S8 | S9 | S10 | |
| SM | 75.04 | 75.38 | 77.15 | 67.86 | 74.56 |
| SP | 72.22 | 72.28 | 65.38 | 75.77 | 69.76 |
| SMin | 77 | 74.44 | 71.15 | 71.75 | 66.62 |
| S11 | S12 | S13 | S14 | S15 | |
| SM | 66.78 | 64.76 | 60.37 | 71.54 | 79.6 |
| SP | 69.74 | 69.56 | 65.47 | 71.94 | 59.81 |
| SMin | 66.87 | 70.61 | 64.74 | 69.22 | 67.6 |
| Features | A1 | A2 | A3 |
|---|---|---|---|
| SM | 69.26 | 61.65 | 57.05 |
| SP | 68.91 | 60.18 | 57.72 |
| SMin | 55.1 | 50.05 | 51.93 |
| Technique | Learning Method | Time Response | Number of Control Commands | Classification Accuracy |
|---|---|---|---|---|
| TD features [58] | LDA | 5.5 s | 2 | 72.82% |
| FD features [59] | LDA/SVM | 15 s | 2 | 83% |
| Raw fNIRS [22] | ANN | 4 s | 4 | 58% |
| TD features [60] | SVM | 0.5 s | 6 | 68.1% |
| Proposed framework | ANN | 320 µs | 6 | 78.65% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sattar, N.Y.; Kausar, Z.; Usama, S.A.; Farooq, U.; Shah, M.F.; Muhammad, S.; Khan, R.; Badran, M. fNIRS-Based Upper Limb Motion Intention Recognition Using an Artificial Neural Network for Transhumeral Amputees. Sensors 2022, 22, 726. https://0-doi-org.brum.beds.ac.uk/10.3390/s22030726
Sattar NY, Kausar Z, Usama SA, Farooq U, Shah MF, Muhammad S, Khan R, Badran M. fNIRS-Based Upper Limb Motion Intention Recognition Using an Artificial Neural Network for Transhumeral Amputees. Sensors. 2022; 22(3):726. https://0-doi-org.brum.beds.ac.uk/10.3390/s22030726
Chicago/Turabian StyleSattar, Neelum Yousaf, Zareena Kausar, Syed Ali Usama, Umer Farooq, Muhammad Faizan Shah, Shaheer Muhammad, Razaullah Khan, and Mohamed Badran. 2022. "fNIRS-Based Upper Limb Motion Intention Recognition Using an Artificial Neural Network for Transhumeral Amputees" Sensors 22, no. 3: 726. https://0-doi-org.brum.beds.ac.uk/10.3390/s22030726