

Modulation Recognition Method for Underwater Acoustic Communication Signals Based on Passive Time Reversal-Autoencoder with the Synchronous Signals

Abstract
:1. Introduction
2. Signal Model
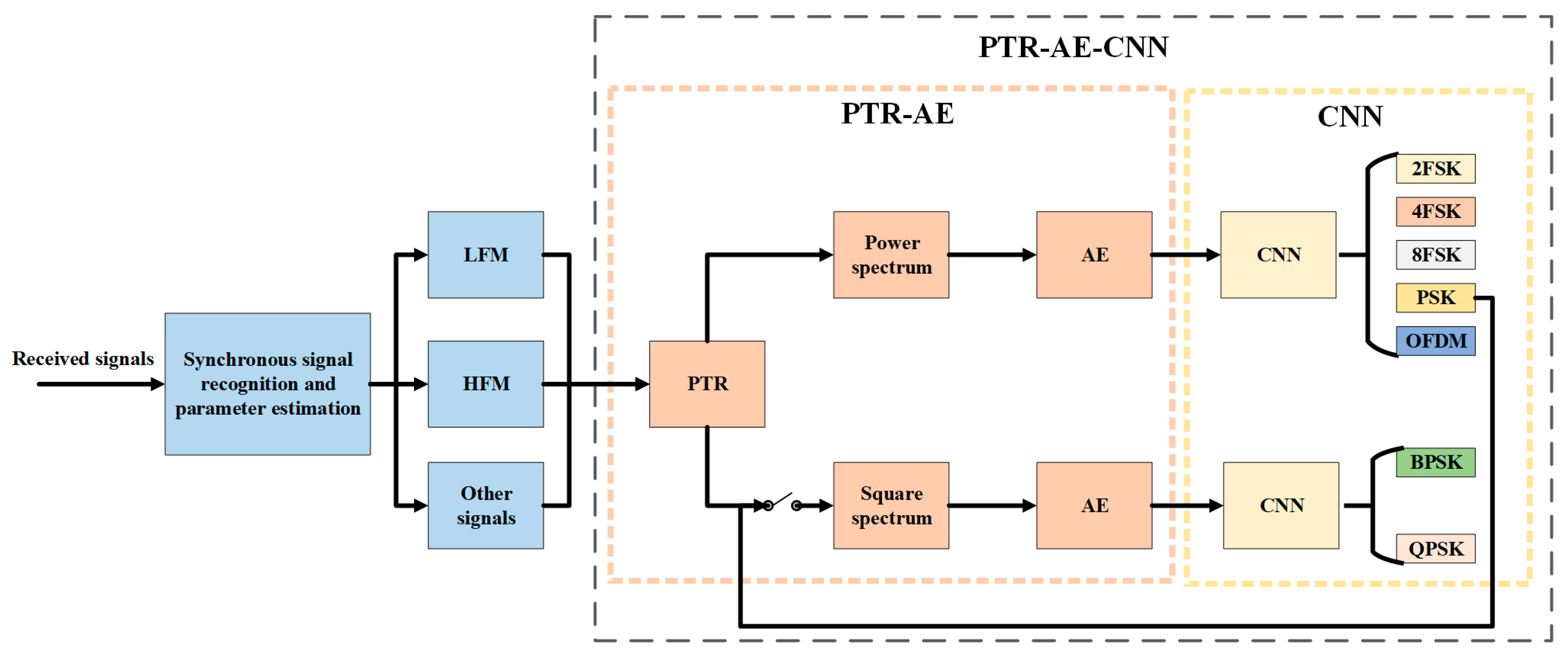
3. System Model and Proposed Method
4. Synchronous Signal Recognition
4.1. Structure of Synchronous Signal Recognition Network
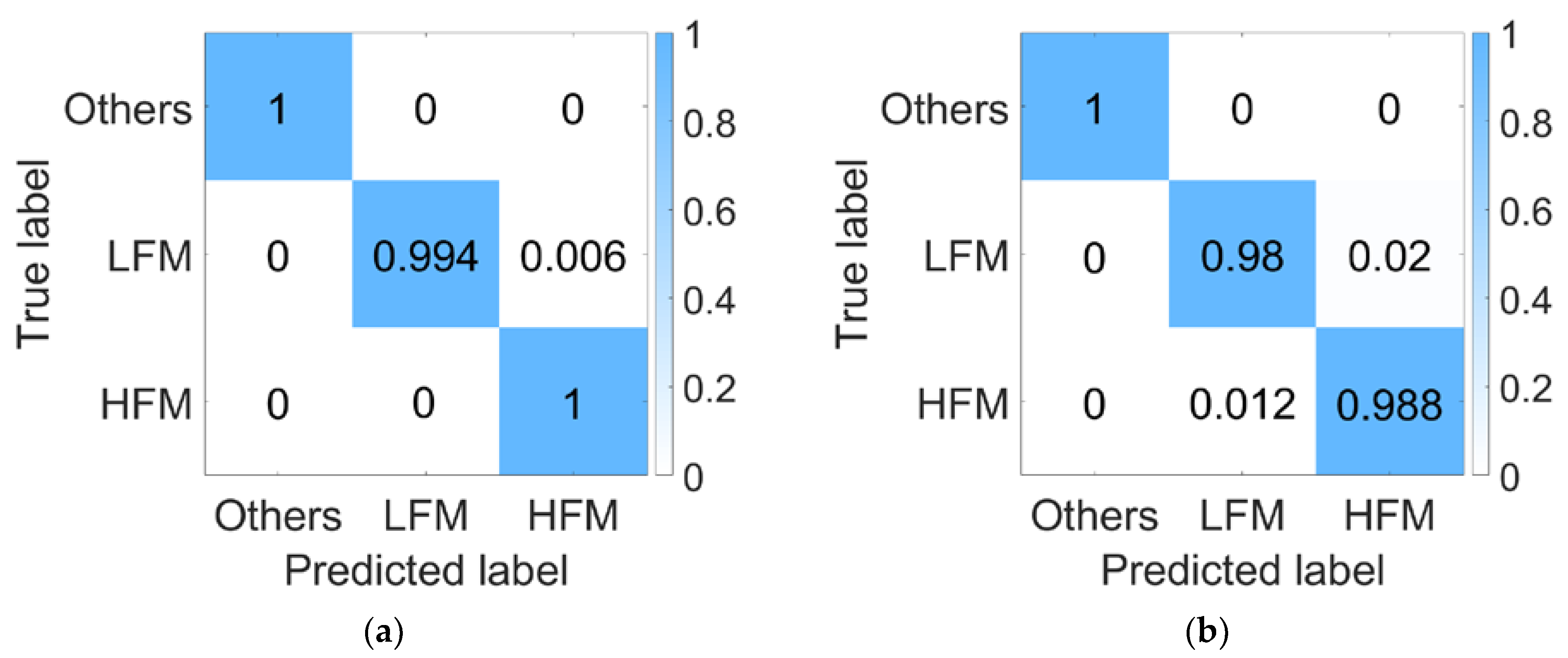
4.2. Training and Testing of Synchronous Signal Recognition Network Models
5. Estimation of Synchronous Signal Parameters
5.1. Estimation of LFM Parameters
5.2. Estimation of HFM Parameters
6. Signal Frequency Domain Feature Enhancement Network Based on PTR-AE
6.1. Passive Time Reversal Detection Signal Selection
- (1)
- Its frequency band must cover all frequency bands of the effective signal data;
- (2)
- It must have good autocorrelation characteristics;
- (3)
- Its frequency spectrum should be whitened as much as possible within the frequency band.
6.2. The Principle of Passive Time Reversal
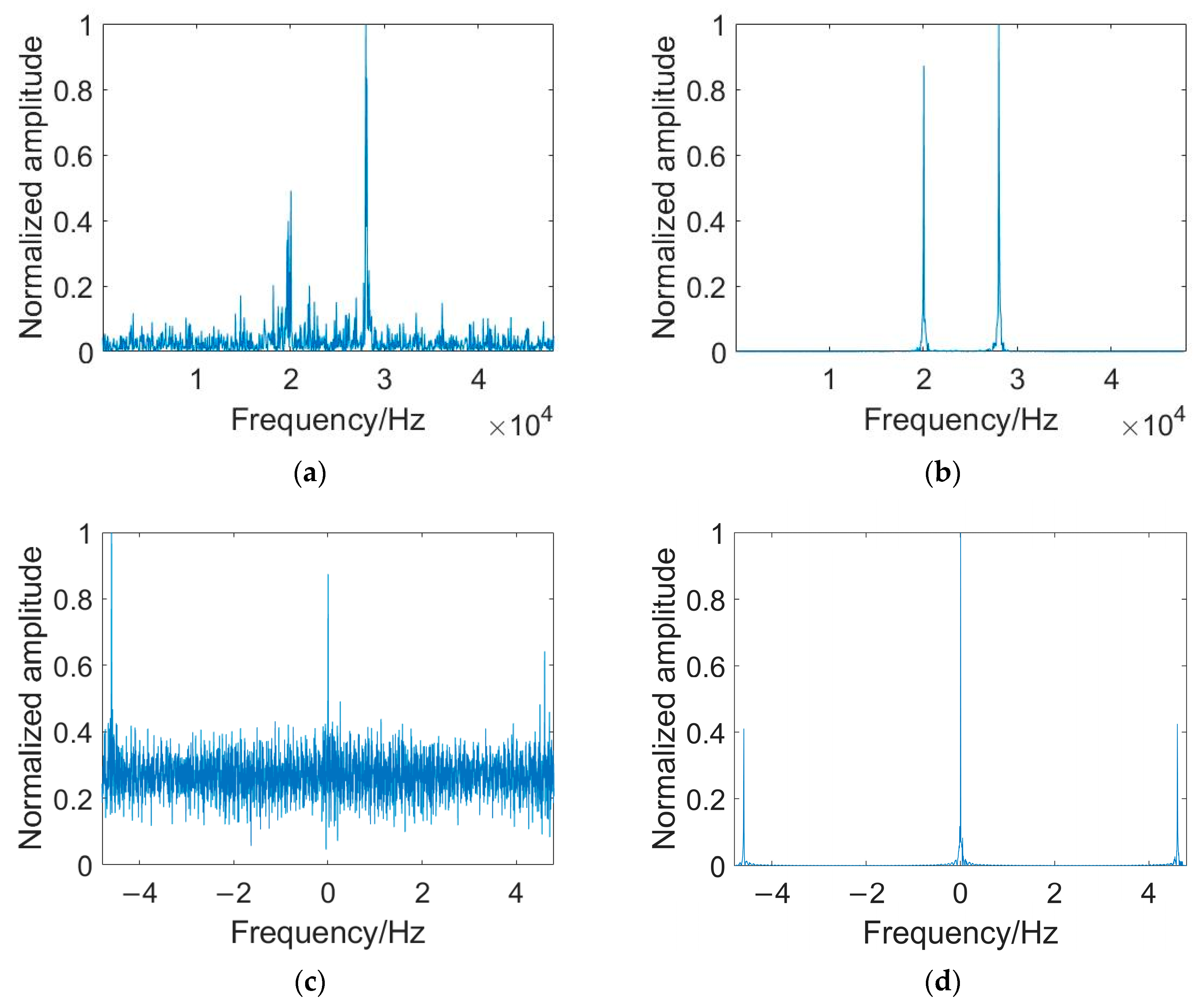
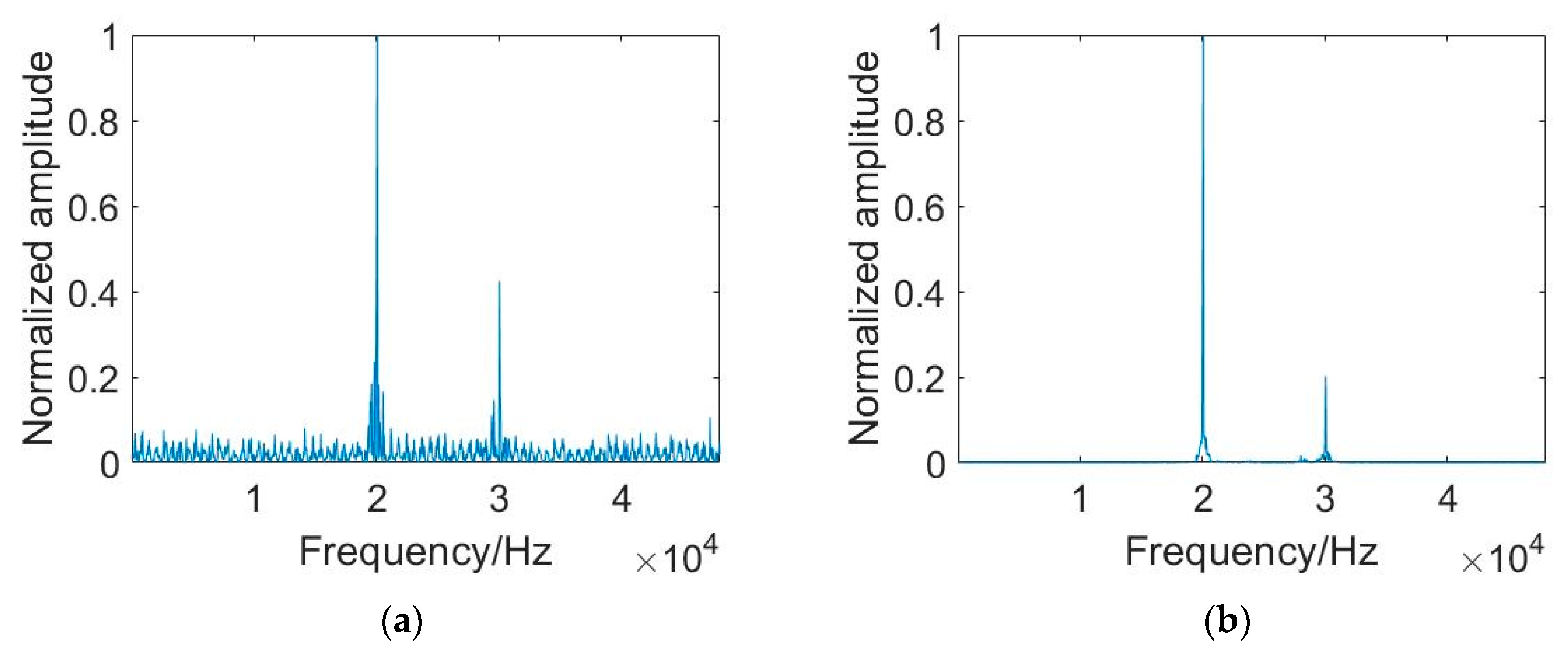
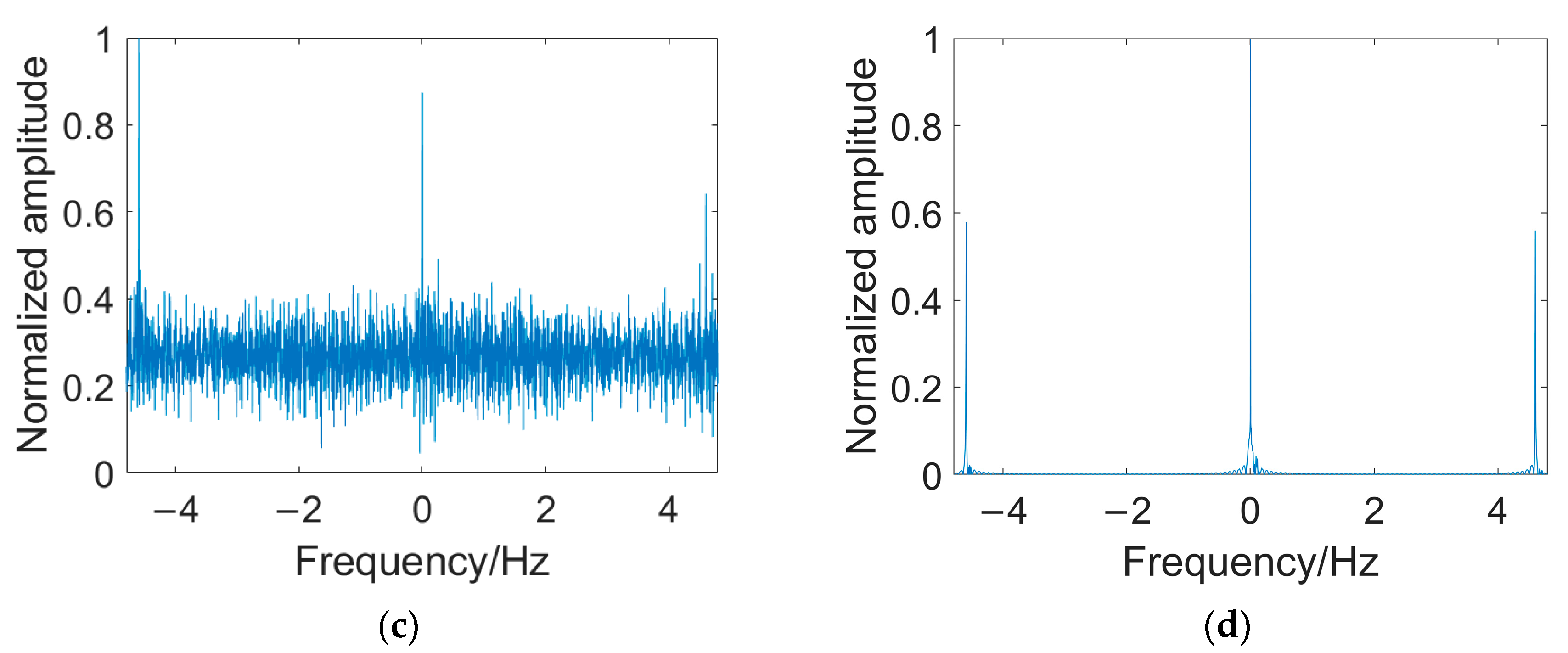
6.3. Feature Spectrum Estimation
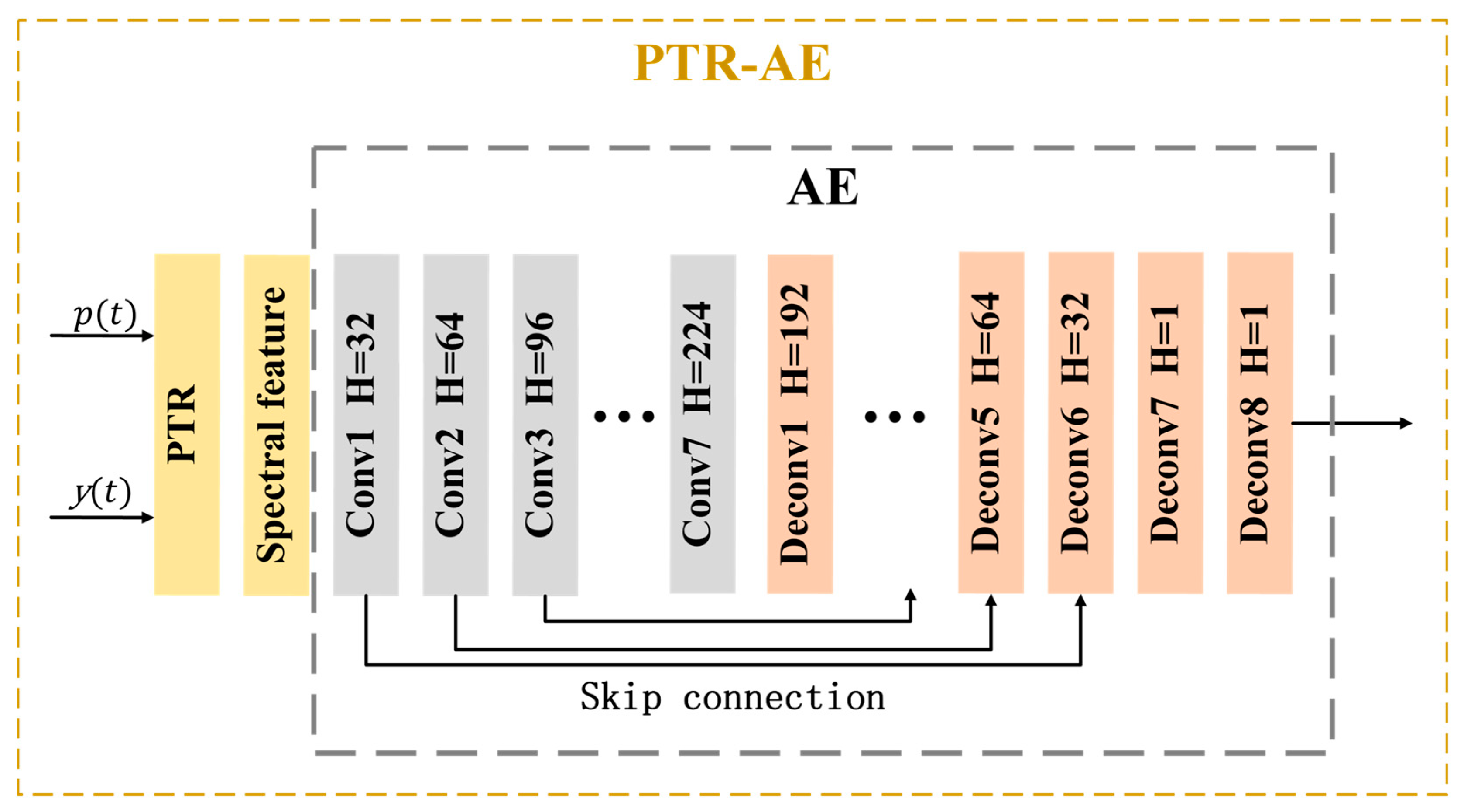
6.4. Structure of PTR-AE
7. CNN-Based Modulation Classification Network
8. Training and Testing of PTR-AE-CNN
8.1. Training of PTR-AE-CNN
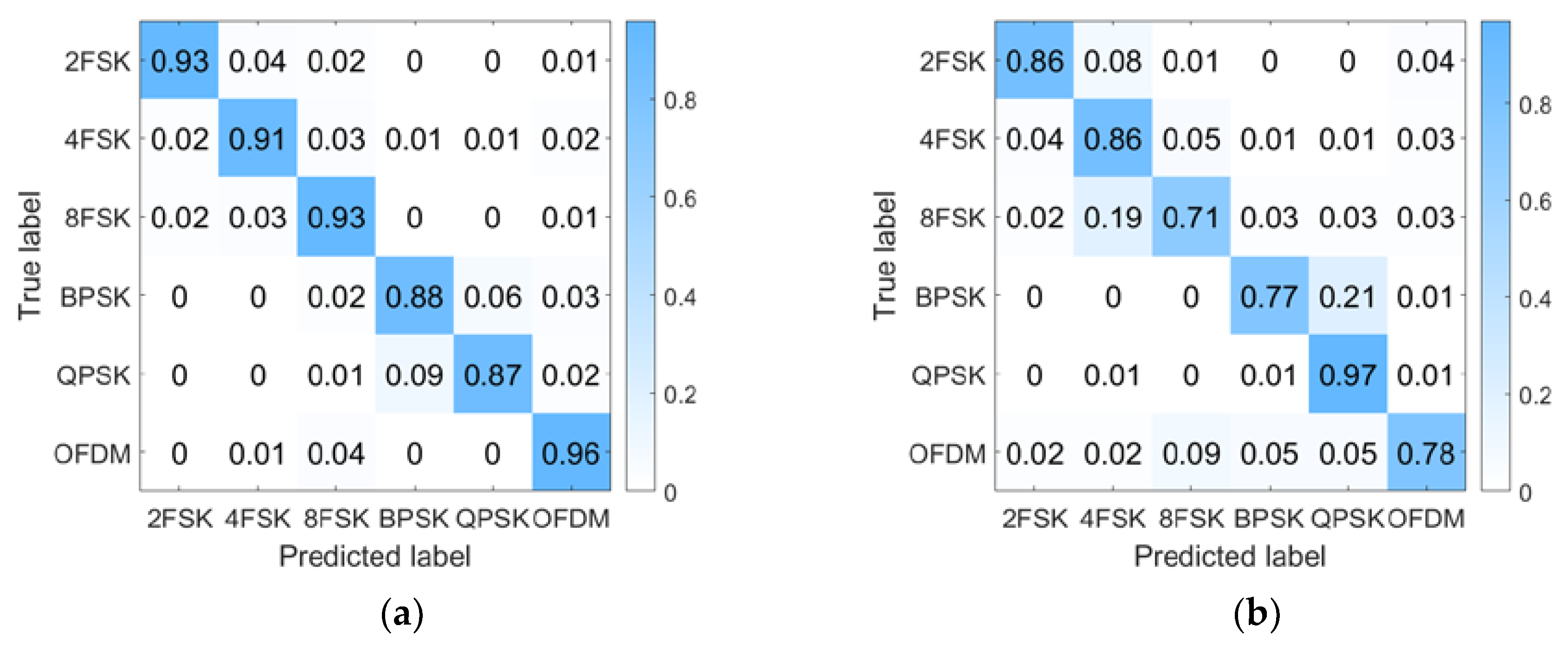
8.2. Performance Testing of PTR-AE-CNN
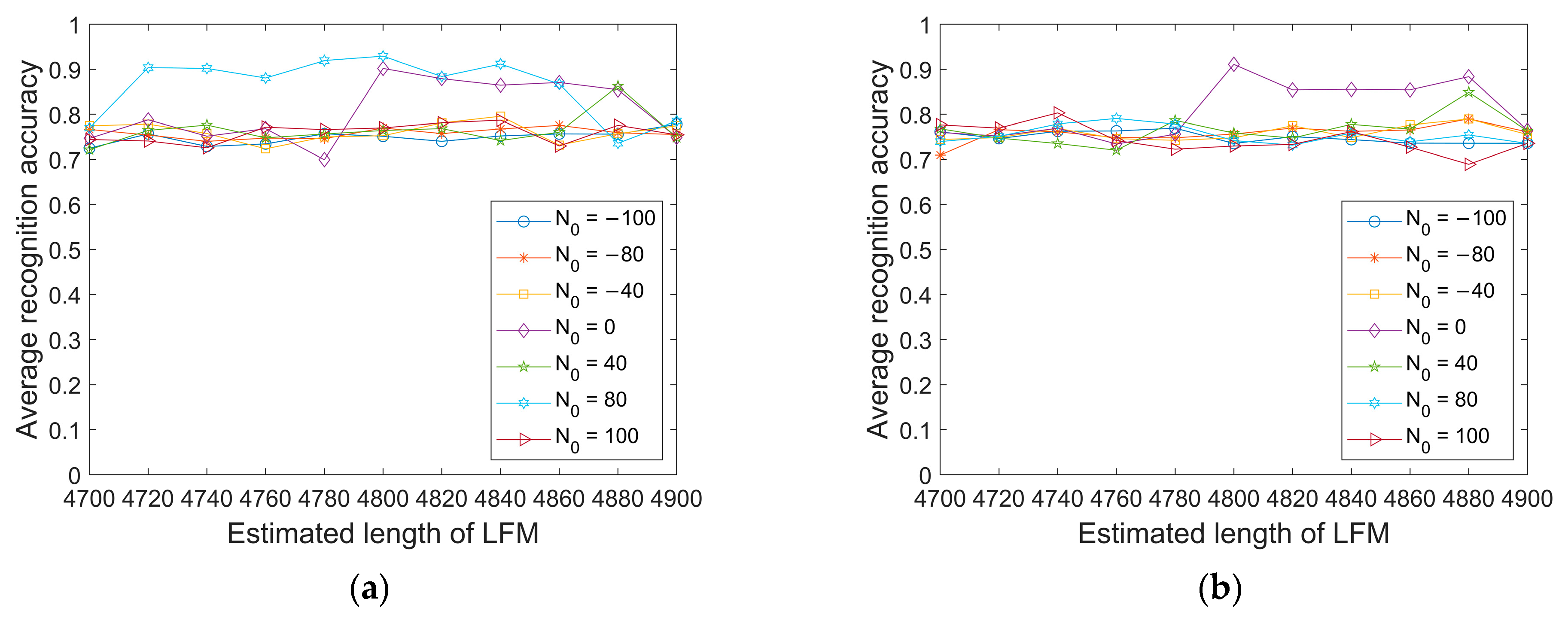
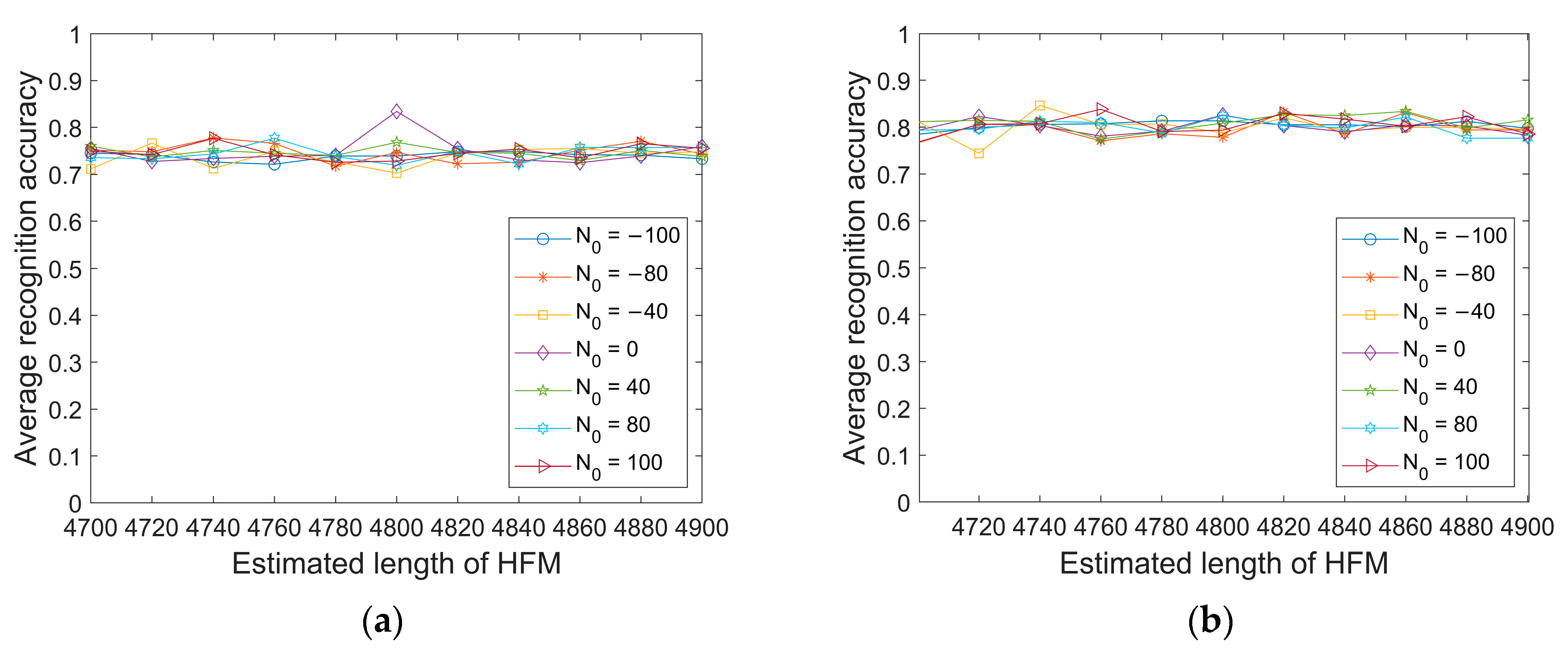
8.3. Testing the Impact of Signal Synchronization and Length Error on the Model
9. Discussion
9.1. Significance of the Proposed Method
9.2. Future Research Direction
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huynh-The, T.; Nguyen, T.Q.; Pham, Q.V.; da Costa, D.B.; Kwon, G.H.; Kim, D.S. Efficient convolutional networks for robust automatic modulation classification in OFDM-based wireless systems. IEEE Syst. J. 2023, 17, 964–975. [Google Scholar] [CrossRef]
- Kassri, N.; Ennouaary, A.; Bah, S. Lightweight Hybrid Deep Learning Scheme for Automatic Modulation Classification in Cognitive Radio Networks. In Proceedings of the 2022 9th International Conference on Future Internet of Things and Cloud (FiCloud), Rome, Italy, 22–24 August 2022; pp. 113–118. [Google Scholar]
- Mousa, N.A.; Sadkhan, S.B. Identification the modulation type in cognitive radio network based on Alexnet architecture. In Proceedings of the 2022 5th International Conference on Engineering Technology and Its Applications (IICETA), Al-Najaf, Iraq, 31 May–1 June 2022; pp. 218–221. [Google Scholar]
- Sherme, A.E. A novel method for automatic modulation recognition. Appl. Soft Comput. 2012, 12, 453–461. [Google Scholar] [CrossRef]
- Spooner, C.M.; Mody, A.N.; Chuang, J.; Petersen, J. Modulation recognition using second- and higher-order cyclostationarity. In Proceedings of the 2017 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Baltimore, MD, USA, 6–9 March 2017; pp. 1–3. [Google Scholar]
- Sobolewski, S.; Adams, W.L.; Sankar, R. Recognition of modern modulated waveforms with applications to ABMS and VDATS test program set development. In Proceedings of the 2022 IEEE Autotestcon, National Harbor, MD, USA, 23 December 2022; pp. 1–7. [Google Scholar]
- Zhang, L.; Zhu, H.; Sun, W.; Zhou, Q. Performance analysis of underwater acoustic automatic modulation classification system with machine learning. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 1310–1314. [Google Scholar]
- Stanescu, D.; Digulescu, A.; Ioana, C.; Serbanescu, A. Modulation recognition of underwater acoustic communication signals based on phase diagram entropy. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–7. [Google Scholar]
- Dai, Y.J.; Huang, X.Z.; Chen, Z.R. Application of wavelet denoising and time-frequency domain feature extraction on data pro-cessing of modulated signals. In Proceedings of the 2021 2nd International Seminar on Artificial Intelligence, Networking and Information Technology (AINIT), Shanghai, China, 15–17 October 2021; pp. 611–615. [Google Scholar]
- Huang, Z.H.; Li, S.; Yang, X.H. OAE-EEKNN: An accurate and efficient automatic modulation recognition method for underwater acoustic signals. IEEE Signal Process. Lett. 2022, 29, 518–522. [Google Scholar] [CrossRef]
- Amorim, A.; Morehouse, T.; Kasilingam, D.; Zhou, R.L.; Magotra, N. CNN-based AMC for internet of underwater things. In Proceedings of the 2021 IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Lansing, MI, USA, 9–11 August 2021; pp. 688–691. [Google Scholar]
- Li, Y.Y.; Liang, S.C. Research on modulation recognition of underwater acoustic communication signal based on deep learning. J. Phys. Conf. Ser. 2023, 2435, 012007. [Google Scholar] [CrossRef]
- Yao, X.H.; Yang, H.H.; Li, Y.Q. Modulation identification of underwater acoustic communications signals based on generative adversarial network. In Proceedings of the OCEANS Conference, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Yu, X.S.; Li, L.; Yin, J.W.; Shao, M.Q.; Han, X. Modulation pattern recognition of non-cooperative underwater acoustic communication signals based on LSTM network. In Proceedings of the International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar]
- Zhang, W.L.; Yang, X.H.; Leng, C.L.; Wang, J.J.; Mao, S.W. Modulation recognition of underwater acoustic signals using deep hybrid neural network. IEEE Trans. Wirel. Commun. 2022, 21, 5977–5988. [Google Scholar] [CrossRef]
- Kong, X.Y.; Tao, J.; Wu, Y.J.; Jiang, M.; Cao, H.L. Channel replay aided modulation classification of underwater acoustic communication signals. In Proceedings of the IEEE/CIC International Conference on Communications in China (ICCC Workshops), Xiamen, China, 28–30 July 2021; pp. 228–232. [Google Scholar]
- Wang, Y.; Jin, Y.H.; Zhang, H.; Lu, Q.; Cao, C.H.; Sang, Z.L.; Sun, M. Underwater communication signal recognition using sequence convolutional network. IEEE Access 2021, 9, 46886–46899. [Google Scholar] [CrossRef]
- Liu, W.Q.; Lyu, Y.H.; Jiang, B.; Yue, X. Modulation recognition of underwater acoustic communication signals based on deep heterogeneous network. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 1043–1047. [Google Scholar]
- Xiao, Y.H.; Zhang, Y.F.; Tao, J. CNN-based automatic modulation classification over underwater acoustic channels. In Proceedings of the OCEANS 2021: San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–5. [Google Scholar]
- Jiang, N.; Wang, B. Modulation recognition of underwater acoustic communication signals based on data transfer. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019; pp. 243–246. [Google Scholar]
- Wang, B.; Wang, H.W.; Li, Y.B. Modulation recognition method for underwater acoustic communication signals in pulse noise environment. Signal Process. 2020, 36, 2107–2115. [Google Scholar]
- Wang, H.W.; Wang, B.; Wang, R. Modulation recognition method for underwater acoustic communication signal based on relation network under small sample set. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 1287–1291. [Google Scholar]
- Xu, Z.H.; Wu, X.R.; Gao, D.Q.; Su, W. Blind modulation recognition of UWA signals with semi-supervised learning. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 25–26 October 2022; pp. 1–5. [Google Scholar]
- Kou, L.; Gong, X.D.; Zheng, Y.; Ni, X.H.; Feng, X.C.; Wang, F.; Li, X.J.; Yuan, Q.D.; Dong, Y.N. Signals recognition of underwater acoustic communication based on artificial neural network and signal feature extraction. In Proceedings of the 2021 IEEE International Conference on Electronic Technology, Communication and Information (ICETCI), Changchun, China, 27–29 August 2021; pp. 278–283. [Google Scholar]
- Jiang, W.H.; Tong, F.; Dong, Y.Z.; Liu, S.G. Modulation recognition of non-cooperation underwater acoustic communication signals using principal component analysis. Appl. Acoust. 2018, 138, 209–215. [Google Scholar] [CrossRef]
- Li, Y.B.; Wang, B.; Shao, G.P.; Shao, S. Automatic modulation classification for short burst underwater acoustic communication signals based on hybrid neural networks. IEEE Access 2020, 8, 227793–227809. [Google Scholar] [CrossRef]
- Yin, J.W.; Hui, J.Y.; Guo, L.X.; Ma, J.G. Channel equalization using passive time reversal mirror in underwater acoustic communication. In Proceedings of the 2006 International Conference on Communication Technology, Guilin, China, 27–30 November 2006; pp. 1–4. [Google Scholar]
- Wang, B.; Wang, H.W.; Li, Y.B. A modulation recognition method for underwater acoustic communication signals based on CGAN+CNN. J. Univ. Inf. Eng. 2021, 22, 1–7. [Google Scholar]
- Wang, K.; Chen, S.; Liu, C.; Liu, Y.; Xu, Y. Doppler estimation and timing synchronization of underwater acoustic communication based on hyperbolic frequency modulation signal. In Proceedings of the International Conference on Networking, Taipei, China, 9–11 April 2015; pp. 75–80. [Google Scholar]
- Huang, X.; Zhang, L.; Zhang, J.; Li, S. Efficient angular chirp-fourier transform and its application to high-speed target detection. Signal Process. 2019, 164, 234–248. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef] [Green Version]
- Yuan, D.P. Research on Parameter Estimation Method of Hyperbolic Frequency Modulation Signal in Underwater Acoustic Environment. Master’s Thesis, South China University of Technology, Guangzhou, China, April 2020. [Google Scholar]
- Li, H.B.; Chen, C.X. Wireless communication system simulation and detection signal selection based on time inversion. Tele-Commun. Technol. 2013, 53, 800–806. [Google Scholar]
- Walree, P.A.V.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The Watermark benchmark for underwater acoustic modulation schemes. IEEE J. Ocean. Eng. 2017, 42, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.B.; Wang, B.; Shao, G.P. A modulation recognition method for underwater acoustic communication signals based on Alexnet. In Proceedings of the 2018 National Acoustics Conference C Underwater Acoustic Engineering and Underwater Signal Processing, Beijing, China, 10–12 November 2018; pp. 114–115. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulation Types | Symbol Rate/(Symbol·s−1) | Carrier Frequency/kHz | Number of Subcarriers | Frequency Modulated Ratio/(kHz·s−1) | Bandwidth/kHz |
|---|---|---|---|---|---|
| 2FSK | {800, 1000} | [20, 30] | / | / | / |
| 4FSK | {400, 500} | [20, 30] | / | / | / |
| 8FSK | {400, 500} | [20, 30] | / | / | / |
| BPSK | 1000 | 25 | / | / | / |
| QPSK | 1000 | 25 | / | / | / |
| OFDM | / | [20, 30] | 1024 | / | 10 |
| LFM | / | [20, 30] | / | [100,000, 200,000]∪[−200,000, −100,000] | [8, 10] |
| HFM | / | [20, 30] | / | [1/6000, 1/2800]∪[−1/2800, −1/6000] | [8, 10] |
| Parameters | Channel 1 | Channel 2 | Channel 3 |
|---|---|---|---|
| Depth/m | 100 | 100 | 100 |
| Sending height/m | 50 | 20 | 50 |
| Receiving height/m | 60 | 50 | 60 |
| Distance/m | 1000 | 1000 | 1300 |
| Parameters | Haihe | Danjiangkou Reservoir |
|---|---|---|
| Depth/m | 8 | 53 |
| Sending height/m | 6.5 | 43 |
| Receiving height/m | 6.5 | 43 |
| Distance/km | 1 | 0.5 |
| Parameters | Sending Signals | Haihe | Danjiangkou Reservoir |
|---|---|---|---|
| 0 | 17 | 52 | |
| 4800 | 4780 | 4849 | |
| 20 | 19.93 | 20.12 | |
| 30 | 29.933 | 30.11 | |
| /(kHz·s−1) | 200 | 200.9 | 197.79 |
| 1.066 | 1.065 | 1.064 |
| Parameters | Sending Signals | Haihe | Danjiangkou Reservoir |
|---|---|---|---|
| 0 | −82 | −43 | |
| 4800 | 4711 | 4864 | |
| /kHz | 20 | 19.795 | 19.718 |
| /kHz | 30 | 29.952 | 30.278 |
| /(Hz·ms−1) | −0.33333 | −0.34907 | −0.34907 |
| ρ | 4.1667 × 10−5 | 4.2274 × 10−5 | 4.2274 × 10−5 |
| θ/° | 89.9809 | 89.98 | 89.98 |
| Modulation Types | Symbol Rate/(Symbol·s−1) | Carrier Frequency/kHz | Number of Subcarriers | Frequency Modulated Rate/(kHz·s−1) |
|---|---|---|---|---|
| 2FSK | {800, 1000} | [20, 30] | / | / |
| 4FSK | {400, 500} | [20, 30] | / | / |
| 8FSK | {400, 500} | [20, 30] | / | / |
| BPSK | 1000 | 25 | / | / |
| QPSK | 1000 | 25 | / | / |
| OFDM | / | [20, 30] | 1024 | / |
| LFM | / | [20, 30] | / | 2 × 105 |
| HFM | / | [20, 30] | / | −3.3333 × 10−4 |
| Methods | Haihe | Danjiangkou Reservoir | Parameter Quantities |
|---|---|---|---|
| PTR-AE-CNN(LFM) | 91.1% | 90.2% | 6,968,000 |
| PTR-AE-CNN(HFM) | 82.6% | 83.4% | |
| CNN(LFM) | 50.4% | 39.9% | 49,000 |
| CNN(HFM) | 57.1% | 60.0% | |
| Resnet [16] | 17.7% | 18.5% | 53,000 |
| DAE-Alexnet [21] | 68.2% | 70.2% | 118,450,000 |
| Alexnet [35] | 70.2% | 48.2% | 61,100,000 |
| R&CNN [15] | 16.7% | 16.6% | 7,672,000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Bao, J.; Sun, W.; Fu, X. Modulation Recognition Method for Underwater Acoustic Communication Signals Based on Passive Time Reversal-Autoencoder with the Synchronous Signals. Sensors 2023, 23, 5997. https://0-doi-org.brum.beds.ac.uk/10.3390/s23135997
Hu Y, Bao J, Sun W, Fu X. Modulation Recognition Method for Underwater Acoustic Communication Signals Based on Passive Time Reversal-Autoencoder with the Synchronous Signals. Sensors. 2023; 23(13):5997. https://0-doi-org.brum.beds.ac.uk/10.3390/s23135997
Chicago/Turabian StyleHu, Yalin, Jixin Bao, Wanzhong Sun, and Xiaomei Fu. 2023. "Modulation Recognition Method for Underwater Acoustic Communication Signals Based on Passive Time Reversal-Autoencoder with the Synchronous Signals" Sensors 23, no. 13: 5997. https://0-doi-org.brum.beds.ac.uk/10.3390/s23135997