

Performance Analysis of Relative GPS Positioning for Low-Cost Receiver-Equipped Agricultural Rovers
 , ,
, ,
Abstract
:1. Introduction
- Common-Mode Errors (CME): These are spatially and temporally correlated errors (i.e., they comprise propagation and temporal systematic errors that are experienced by all receivers in the same vicinity and time span). Among them, ephemeris error, satellite clock bias, intersignal biases, and ionospheric and tropospheric delays stand out.
- Non-Common-Mode Errors (NCME): Unlike CMEs, NCMEs are different for each receiver, mainly comprising receiver clock bias, multipath error, and receiver tracking noise.
2. GNSS Position Estimation
Relative GNSS Position Estimation
3. Material and Methods
3.1. Experimental Data Acquisition
- An EKF-based standalone GNSS approach using pseudorange measurements. This approach will be referred to as SGNSS in the ensuing text for the sake of brevity.
- EKF-based relative GNSS using single-differentiated pseudorange measurements. Conversely, this approach will be referred to as RGNSS hereinafter.
3.2. Performance Assessment Criteria
4. Experimental Results
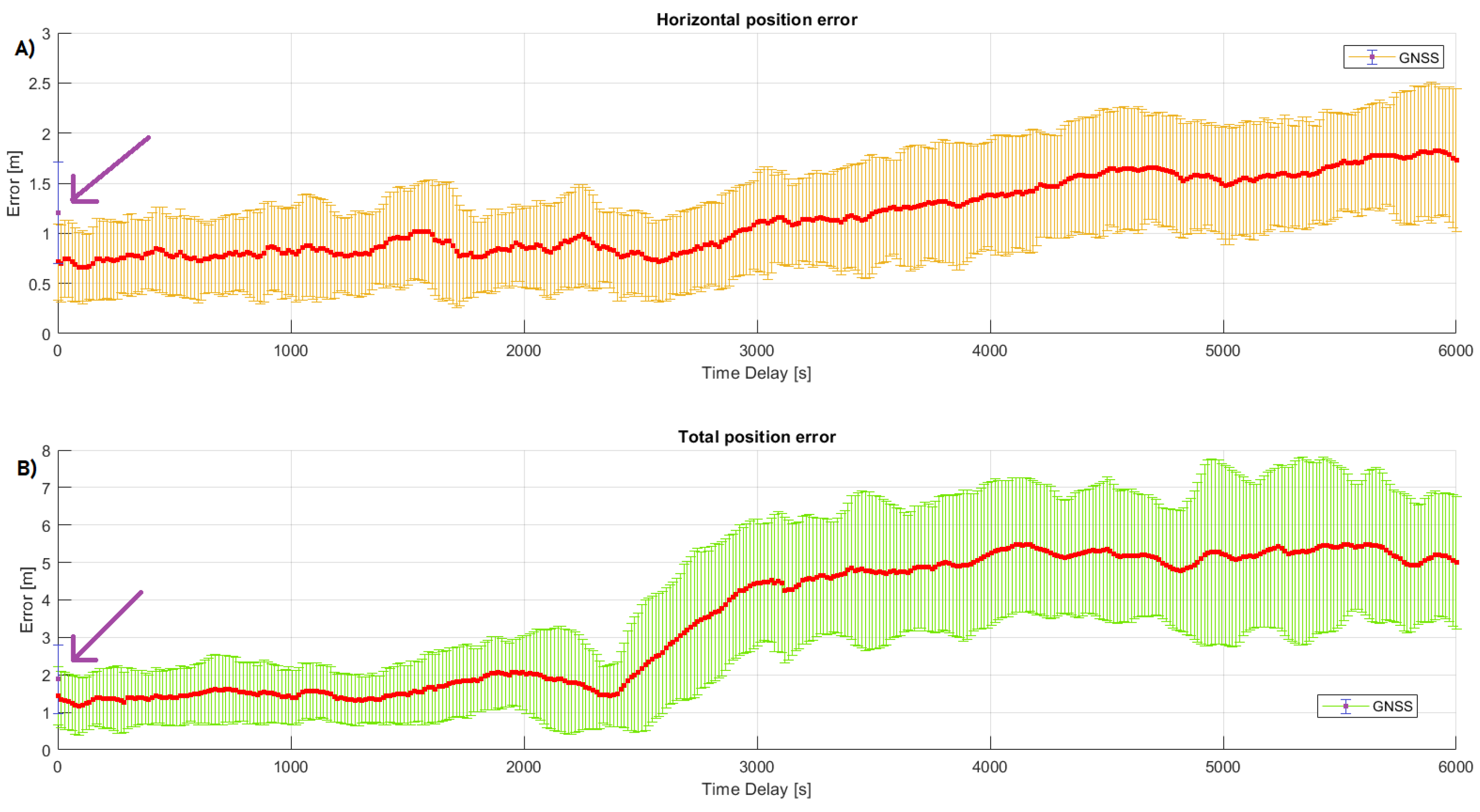
4.1. Sensitivity to Communication Failure
4.2. Sensitivity to Baseline Separation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blewitt, G. Basics of the GPS technique: Observation equations. Geod. Appl. GPS 1997, 10, 54. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Maharashtra, India, 2006; Volume 206. [Google Scholar]
- Alghisi, M.; Biagi, L. Positioning with GNSS and 5G: Analysis of Geometric Accuracy in Urban Scenarios. Sensors 2023, 23, 2181. [Google Scholar] [CrossRef]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS Positioning Using Smart Devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef]
- Tao, Z.; Bonnifait, P.; Frémont, V.; Ibanez-Guzman, J.; Bonnet, S. Road-Centered Map-Aided Localization for Driverless Cars Using Single-Frequency GNSS Receivers. J. Field Robot. 2017, 34, 1010–1022. [Google Scholar] [CrossRef]
- Zhang, G.; Hsu, L.T. A new path planning algorithm using a GNSS localization error map for UAVs in an urban area. J. Intell. Robot. Syst. 2019, 94, 219–235. [Google Scholar] [CrossRef]
- Sahawneh, L.R.; Al-Jarrah, M.A.; Assaleh, K.; Abdel-Hafez, M.F. Real-time implementation of GPS aided low-cost strapdown inertial navigation system. J. Intell. Robot. Syst. 2011, 61, 527–544. [Google Scholar] [CrossRef]
- Vetrella, A.R.; Causa, F.; Renga, A.; Fasano, G.; Accardo, D.; Grassi, M. Multi-UAV carrier phase differential GPS and vision-based sensing for high accuracy attitude estimation. J. Intell. Robot. Syst. 2019, 93, 245–260. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: London, UK, 2013. [Google Scholar]
- Kaplan Elliott, D.; Hegarty Christopher, J. Understanding GPS: Principles and Applications; Artech House: London, UK, 2006. [Google Scholar]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Farrell, J. Aided Navigation: GPS with High Rate Sensors; McGraw-Hill, Inc.: New York, NY, USA, 2008. [Google Scholar]
- Monteleone, S.; Moraes, E.A.d.; Tondato de Faria, B.; Aquino Junior, P.T.; Maia, R.F.; Neto, A.T.; Toscano, A. Exploring the Adoption of Precision Agriculture for Irrigation in the Context of Agriculture 4.0: The Key Role of Internet of Things. Sensors 2020, 20, 7091. [Google Scholar] [CrossRef] [PubMed]
- Kitchener, F.; English, T.; Gopalakrishna, D.; Garcia, V.; Ragan, A.; Young, R.; Ahmed, M.; Stephens, D.; Serulle, N.U. Connected Vehicle Pilot Deployment Program Phase 2, Data Management Plan: Wyoming; Technical Report; U.S. Department of Transportation, Intelligent Transportation: Washington, DC, USA, 2017.
- Kitchener, F.; Young, R.; Ahmed, M.; Yang, G.; Gaweesh, S.; English, T.; Garcia, V.; Ragan, A.; Serulle, N.U.; Gopalakrishna, D.; et al. Connected Vehicle Pilot Deployment Program: Phase 2 Final System Performance Report, Baseline Conditions–WYDOT CV Pilot; Technical Report; U.S. Department of Transportation: Washington, DC, USA, 2018.
- Rovira-Más, F.; Chatterjee, I.; Sáiz-Rubio, V. The role of GNSS in the navigation strategies of cost-effective agricultural robots. Comput. Electron. Agric. 2015, 112, 172–183. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, B.; Zhou, J.; Yan, Y.; Tian, G.; Gu, B. Recent developments and applications of simultaneous localization and mapping in agriculture. J. Field Robot. 2022, 39, 956–983. [Google Scholar] [CrossRef]
- Winterhalter, W.; Fleckenstein, F.; Dornhege, C.; Burgard, W. Localization for precision navigation in agricultural fields—Beyond crop row following. J. Field Robot. 2020, 38, 429–451. [Google Scholar] [CrossRef]
- Monico, J.F.G. Posicionamento pelo Navstar-GPS; Unesp: São Paulo, Brazil, 2000. [Google Scholar]
- Bengochea-Guevara, J.M.; Conesa-Muñoz, J.; Andújar, D.; Ribeiro, A. Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot. Sensors 2016, 16, 276. [Google Scholar] [CrossRef]
- Gao, P.; Lee, H.; Jeon, C.W.; Yun, C.; Kim, H.J.; Wang, W.; Liang, G.; Chen, Y.; Zhang, Z.; Han, X. Improved Position Estimation Algorithm of Agricultural Mobile Robots Based on Multisensor Fusion and Autoencoder Neural Network. Sensors 2022, 22, 1522. [Google Scholar] [CrossRef]
- Xu, R.; Li, C. A modular agricultural robotic system (MARS) for precision farming: Concept and implementation. J. Field Robot. 2022, 39, 387–409. [Google Scholar] [CrossRef]
- Liang, Y.; Zhou, K.; Wu, C. Environment scenario identification based on GNSS recordings for agricultural tractors. Comput. Electron. Agric. 2022, 195, 106829. [Google Scholar] [CrossRef]
- He, X.; Zhang, D.; Yang, L.; Cui, T.; Ding, Y.; Zhong, X. Design and experiment of a GPS-based turn compensation system for improving the seeding uniformity of maize planter. Comput. Electron. Agric. 2021, 187, 106250. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Slaughter, D.; Gliever, C.; Upadhyaya, S. Automatic GPS-based intra-row weed knife control system for transplanted row crops. Comput. Electron. Agric. 2012, 80, 41–49. [Google Scholar] [CrossRef]
- Teunissen, P. Differential GPS: Concepts and quality control. Neth. Inst. Navig. Amst. 1991, 10, 48–60. [Google Scholar]
- Daly, P. GLONASS Approaches Full Operational Capablllty (FOC). In Proceedings of the 8th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995; pp. 1021–1030. [Google Scholar]
- China. Development of the BeiDou Navigation Satellite System. BeiDou Is Operated and Maintained by the China Satellite Navigation Office. 2019. Available online: http://en.beidou.gov.cn/SYSTEMS/Officialdocument/ (accessed on 25 February 2022).
- Galileo European Commission. Galileo Is Operated by European GNSS Agency and Maintained by European Space Agency. 2022. Available online: https://www.esa.int/Applications/Navigation/Galileo (accessed on 15 February 2022).
- Lachapelle, G. GPS observables and error sources for kinematic positioning. In Kinematic Systems in Geodesy, Surveying, and Remote Sensing; Springer: Berlin/Heidelberg, Germany, 1991; pp. 17–26. [Google Scholar]
- Farrell, J.; Grewal, M.; Djodot, M.; Barth, M. Differential GPS with latency compensation for autonomous navigation. In Proceedings of the 1996 IEEE International Symposium on Intelligent Control, Dearborn, MI, USA, 15–18 September 1996; pp. 20–24. [Google Scholar]
- Renfro, B.A.; Stein, M.; Boeker, N.; Terry, A. An Analysis of Global Positioning System (GPS) Standard Positioning Service (SPS) Performance for 2019. 2020. Available online: https://www.gps.gov/systems/gps/performance/2019-GPS-SPS-performance-analysis.pdf (accessed on 11 January 2022).
- J2945/1_202004; On-Board System Requirements for V2V Safety Communications. SAE International: Warrendale, PA, USA, 2020. Available online: https://www.sae.org/standards/content/j2945/1_202004/ (accessed on 15 March 2022).
- Mahato, S.; Shaw, G.; Santra, A.; Dan, S.; Kundu, S.; Bose, A. Low Cost GNSS Receiver RTK performance in forest environment. In Proceedings of the URSI Regional Conference on Radio Science (URSI-RCRS), Varanasi, India, 12–14 February 2020; pp. 1–4. [Google Scholar]
- Yang, X.; Yang, J. Discussion on the Practice of Data Processing of GNSS Precision Point Positioning. In Proceedings of the 28th International Conference on Geoinformatics, Nanchang, China, 3–5 November 2021; pp. 1–6. [Google Scholar]
- Schwarzbach, P.; Tauscher, P.; Michler, A.; Michler, O. V2X based Probabilistic Cooperative Position Estimation Applying GNSS Double Differences. In Proceedings of the 2019 International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–6. [Google Scholar]
- Suzuki, T. Time-relative RTK-GNSS: GNSS loop closure in pose graph optimization. IEEE Robot. Autom. Lett. 2020, 5, 4735–4742. [Google Scholar] [CrossRef]
- Jiang, W.; Liu, Y.; Cai, B.; Rizos, C.; Wang, J.; Jiang, Y. A new train integrity resolution method based on online carrier phase relative positioning. IEEE Trans. Veh. Technol. 2020, 69, 10519–10530. [Google Scholar] [CrossRef]
- Kubelka, V.; Dandurand, P.; Babin, P.; Giguere, P.; Pomerleau, F. Radio propagation models for differential GNSS based on dense point clouds. J. Field Robot. 2020, 37, 1347–1362. [Google Scholar] [CrossRef]
- Shao, M.; Sui, X. Study on differential GPS positioning methods. In Proceedings of the 2015 International Conference on Computer Science and Mechanical Automation (CSMA), Hangzhou, China, 23–25 October 2015; pp. 223–225. [Google Scholar]
- Shuxin, C.; Yongsheng, W.; Fei, C. A study of differential GPS positioning accuracy. In Proceedings of the 2002 3rd International Conference on Microwave and Millimeter Wave Technology, ICMMT, Beijing, China, 17–19 August 2002; pp. 361–364. [Google Scholar]
- Walsh, D.; Capaccio, S.; Lowe, D.; Daly, P.; Shardlow, P.; Johnston, G. Real time differential GPS and GLONASS vehicle positioning in urban areas. Space Commun. 1997, 14, 203–217. [Google Scholar]
- Cai, C.; Hu, J. Design and Implementation of Dual-Mode Pseudorange Differential Positioning. In Proceedings of the 2019 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 12–14 July 2019; pp. 283–286. [Google Scholar]
- Zeller, P.; Siebler, B.; Lehner, A.; Sand, S. Relative train localization for cooperative maneuvers using GNSS pseudoranges and geometric track information. In Proceedings of the 2015 International Conference on Localization and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–7. [Google Scholar]
- Alam, N.; Balaei, A.T.; Dempster, A.G. Relative positioning enhancement in VANETs: A tight integration approach. IEEE Trans. Intell. Transp. Syst. 2012, 14, 47–55. [Google Scholar] [CrossRef]
- Liu, K.; Lim, H.B.; Frazzoli, E.; Ji, H.; Lee, V.C. Improving positioning accuracy using GPS pseudorange measurements for cooperative vehicular localization. IEEE Trans. Veh. Technol. 2013, 63, 2544–2556. [Google Scholar] [CrossRef]
- Carvalho, G.S.; Silva, F.O.; Menezes Filho, R.P.; Pereira, V.H.L. Performance Analysis of Code-based Relative GPS Positioning as Function of Baseline Separation. In Proceedings of the 2020 Latin American Robotics Symposium (LARS), Natal, Brazil, 9–13 November 2020; pp. 1–6. [Google Scholar]
- Carvalho, G.S.; Silva, F.O. Performance Analysis of Relative GPS Positioning as Function of Communication Latency. In Proceedings of the 2021 Latin American Robotics Symposium (LARS), 2021 Brazilian Symposium on Robotics (SBR), and 2021 Workshop on Robotics in Education (WRE), Natal, Brazil, 11–15 October 2021; pp. 252–257. [Google Scholar]
- Monteiro, L.S.; Moore, T.; Hill, C. What is the accuracy of DGPS? J. Navig. 2005, 58, 207. [Google Scholar] [CrossRef]
- Tomaštík, J.; Everett, T. Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software. Sensors 2023, 23, 3136. [Google Scholar] [CrossRef]
- He, Y.; Martin, R.; Bilgic, A.M. Approximate iterative Least Squares algorithms for GPS positioning. In Proceedings of the 10th IEEE International Symposium on Signal Processing and Information Technology, Luxor, Egypt, 15–18 December 2010; pp. 231–236. [Google Scholar]
- Amiri-Simkooei, A.; Teunissen, P.; Tiberius, C. Application of least-squares variance component estimation to GPS observables. J. Surv. Eng. 2009, 135, 149–160. [Google Scholar] [CrossRef]
- Adjrad, M.; Groves, P.D. Enhancing least squares GNSS positioning with 3D mapping without accurate prior knowledge. Navig. J. Inst. Navig. 2017, 64, 75–91. [Google Scholar] [CrossRef]
- Rahman, F.; Aghapour, E.; Farrell, J.A. Vehicle ECEF Position Accuracy and Reliability in the Presence of DGNSS Communication Latency. IEEE Intell. Transp. Syst. Mag. 2020, 13, 262–272. [Google Scholar] [CrossRef]
- Rahman, F.; Farrell, J.A. Earth-Centered Earth-Fixed (ECEF) Vehicle State Estimation Performance. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 27–32. [Google Scholar]
- Klobuchar, J. Global Positioning System: Theory and Applications, Volume I; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996; Volume 12, pp. 485–515. [Google Scholar]
- Navstar, G. Space Segment/Navigation User Interfaces, Interface Control Document GPS (200), No. ICD GPS 2022. pp. 97–100. Available online: https://www.gps.gov/technical/icwg/ICD-GPS-200C.pdf (accessed on 15 March 2022).
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS–Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Ohta, Y.; Kobayashi, T.; Tsushima, H.; Miura, S.; Hino, R.; Takasu, T.; Fujimoto, H.; Iinuma, T.; Tachibana, K.; Demachi, T.; et al. Quasi real-time fault model estimation for near-field tsunami forecasting based on RTK-GPS analysis. J. Geophys. Res. Solid Earth 2012, 117, 1–16. [Google Scholar] [CrossRef]
- Gurtner, W.; Estey, L. Rinex-the Receiver Independent Exchange Format—Version 3.00; Astronomical Institute, University of Bern and Unavco: Bolulder, CO, USA, 2007. [Google Scholar]
- IBGE. Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS—RBMC. 2021. Available online: https://bit.ly/2YsldI3 (accessed on 15 December 2021).
- Li, B.; Verhagen, S.; Teunissen, P.J. GNSS integer ambiguity estimation and evaluation: LAMBDA and Ps-LAMBDA. In China Satellite Navigation Conference (CSNC) 2013 Proceedings; Springer: Berlin/Heidelberg, Germany, 2013; pp. 291–301. [Google Scholar]
- Verhagen, S.; Li, B.; Teunissen, P.J. Ps-LAMBDA: Ambiguity success rate evaluation software for interferometric applications. Comput. Geosci. 2013, 54, 361–376. [Google Scholar] [CrossRef]
- Yoon, D.; Kee, C.; Seo, J.; Park, B. Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones. Sensors 2016, 16, 910. [Google Scholar] [CrossRef]
- Weng, D.; Gan, X.; Chen, W.; Ji, S.; Lu, Y. A New DGNSS Positioning Infrastructure for Android Smartphones. Sensors 2020, 20, 487. [Google Scholar] [CrossRef] [PubMed]
- Hodgson, M.E. On the accuracy of low-cost dual-frequency GNSS network receivers and reference data. Gisci. Remote Sens. 2020, 57, 907–923. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SGNSS | RGNSS | |||
|---|---|---|---|---|
| Mean (m) | Std. Dev. (m) | Mean (m) | Std. Dev. (m) | |
| North | 1.0501 | 0.498 | 0.528 | 0.351 |
| East | 0.459 | 0.371 | 0.395 | 0.308 |
| Down | 1.293 | 1.014 | 1.121 | 0.866 |
| Horizontal | 1.202 | 0.505 | 0.713 | 0.381 |
| Total | 1.883 | 0.925 | 1.432 | 0.779 |
| Failure | Mean | Std. Dev. | Max. | Probability () | |
|---|---|---|---|---|---|
| (epochs) | (m) | (m) | (m) | Err < 1 m | Err < 1.5 m |
| (%) | (%) | ||||
| 0 | 0.713 | 0.381 | 2.039 | 77.32 | 96.43 |
| 1500 | 0.952 | 0.471 | 2.295 | 56.18 | 86.24 |
| 3000 | 1.115 | 0.494 | 2.961 | 42.80 | 79.36 |
| Baseline Separation (km) | Mean Error (m) | Std. Dev. (m) | |
|---|---|---|---|
| SGNSS | Does not apply | 1.202 | 0.505 |
| MGLA | 1.184 | 0.713 | 0.381 |
| MGV1 | 60.038 | 0.692 | 0.357 |
| CHPI | 162.245 | 0.696 | 0.503 |
| MGIN | 185.908 | 0.782 | 0.416 |
| SPBP | 248.682 | 0.789 | 0.501 |
| POLI | 316.228 | 0.763 | 0.362 |
| SPS1 | 355.443 | 0.881 | 0.426 |
| MGUB | 429.269 | 0.703 | 0.341 |
| SJRP | 459.137 | 0.875 | 0.412 |
| NEIA | 519.199 | 1.012 | 0.517 |
| SPFE | 558.059 | 0.976 | 0.457 |
| UFPR | 640.374 | 0.790 | 0.400 |
| GOJA | 800.357 | 0.950 | 0.442 |
| SCCH | 1015.505 | 0.754 | 0.406 |
| RSPE | 1389.495 | 0.851 | 0.405 |
| RSAL | 1441.826 | 0.921 | 0.448 |
| PIFL | 1619.417 | 1.377 | 0.729 |
| MTLA | 1658.773 | 2.430 | 0.572 |
| MTJI | 1825.606 | 2.849 | 0.576 |
| ROJI | 2148.614 | 2.752 | 0.627 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carvalho, G.S.; Silva, F.O.; Pacheco, M.V.O.; Campos, G.A.O. Performance Analysis of Relative GPS Positioning for Low-Cost Receiver-Equipped Agricultural Rovers. Sensors 2023, 23, 8835. https://0-doi-org.brum.beds.ac.uk/10.3390/s23218835
Carvalho GS, Silva FO, Pacheco MVO, Campos GAO. Performance Analysis of Relative GPS Positioning for Low-Cost Receiver-Equipped Agricultural Rovers. Sensors. 2023; 23(21):8835. https://0-doi-org.brum.beds.ac.uk/10.3390/s23218835
Chicago/Turabian StyleCarvalho, Gustavo S., Felipe O. Silva, Marcus Vinicius O. Pacheco, and Gleydson A. O. Campos. 2023. "Performance Analysis of Relative GPS Positioning for Low-Cost Receiver-Equipped Agricultural Rovers" Sensors 23, no. 21: 8835. https://0-doi-org.brum.beds.ac.uk/10.3390/s23218835