
Comparative Analysis of Time-Slotted Channel Hopping Schedule Optimization Using Priority-Based Customized Differential Evolution Algorithm in Heterogeneous IoT Networks †
Abstract
:1. Introduction
- We conducted extensive simulations and performed a comprehensive analysis of key metrics and direct comparisons with an alternative approach.
- We integrated a prioritization step into the CDE optimization algorithm. This step prioritizes nodes with higher packet rates or more remaining transmissions, enabling urgent data flows to be transferred first resulting in lower delays and better packet delivery.
- We enhanced the CDE optimization algorithm to find an optimal TSCH schedule that can meet both throughput and delay requirements. The TSCH schedule’s variable number of transmissions in each cell presents a challenge for Differential Evolution (DE) optimization. This is due to the requirement for a defined search space range with specified sizes, which is not fulfilled in this scenario.
- We generated a schedule for the networks with various traffic data rates while most other works addressed fixed packet rates. Most papers consider the fixed packet rate for sensors [9,10,11,12,13,14], and few of the existing works consider heterogeneous sensors. We optimized the throughput and minimized the delay.
2. Related Works
3. Priority-Based Customized DE Optimization
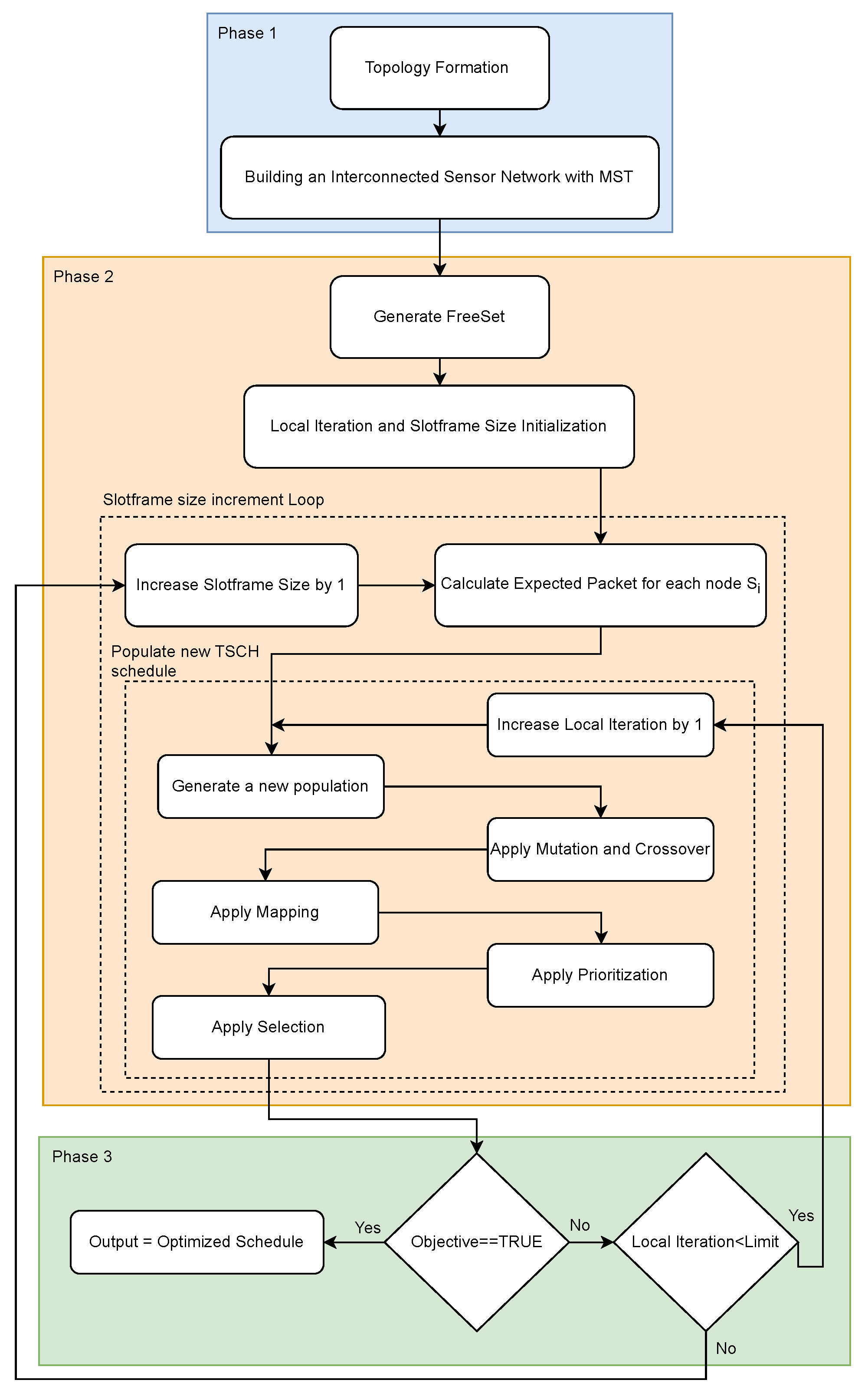
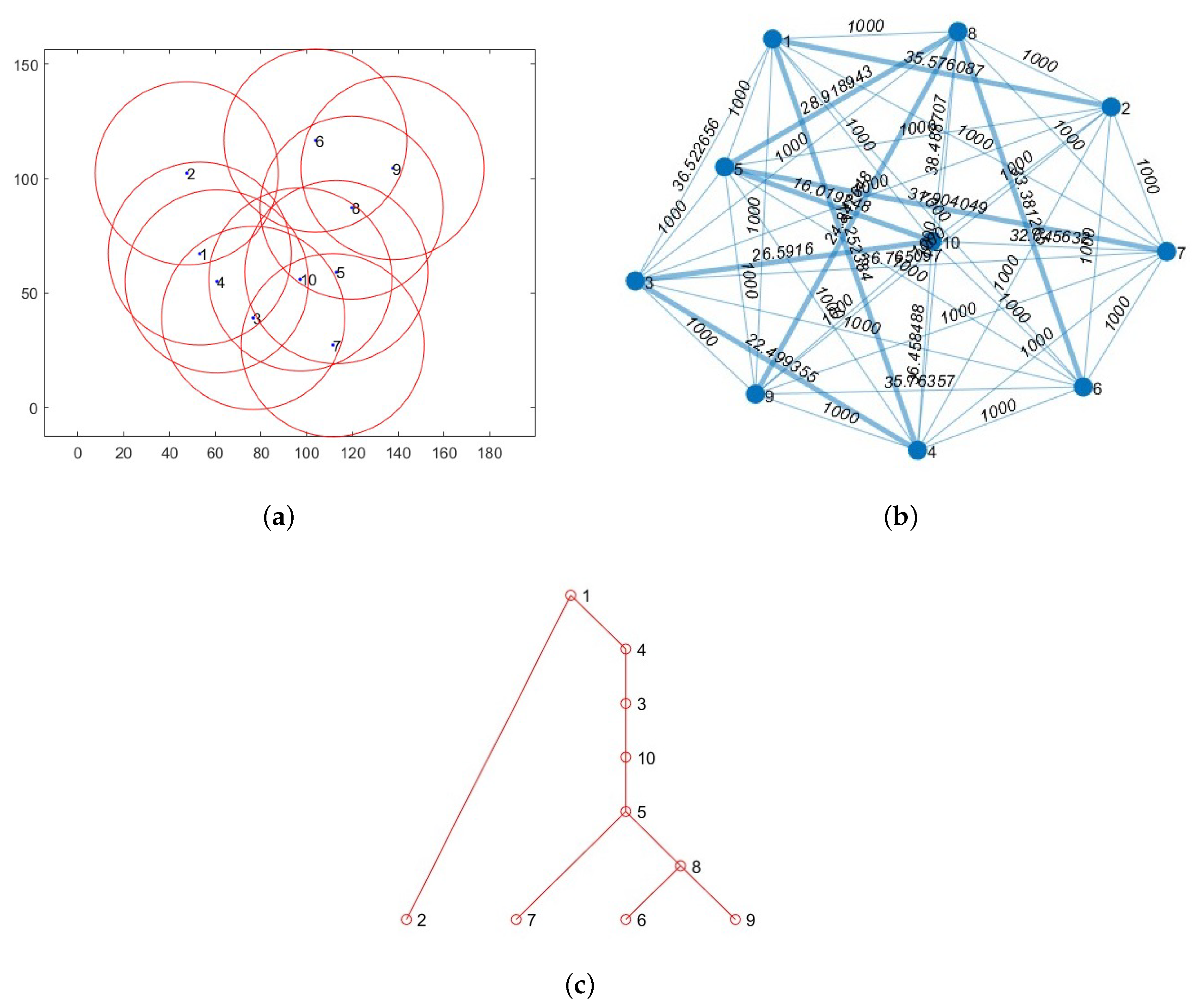
3.1. Topology Formation and Building an Interconnected Sensor Network with MST
3.2. Generating TSCH Schedule Using Priority-Based Customized DE Optimization for Heterogeneous Networks
| Algorithm 1 Connected Spanning Tree Generation |
|
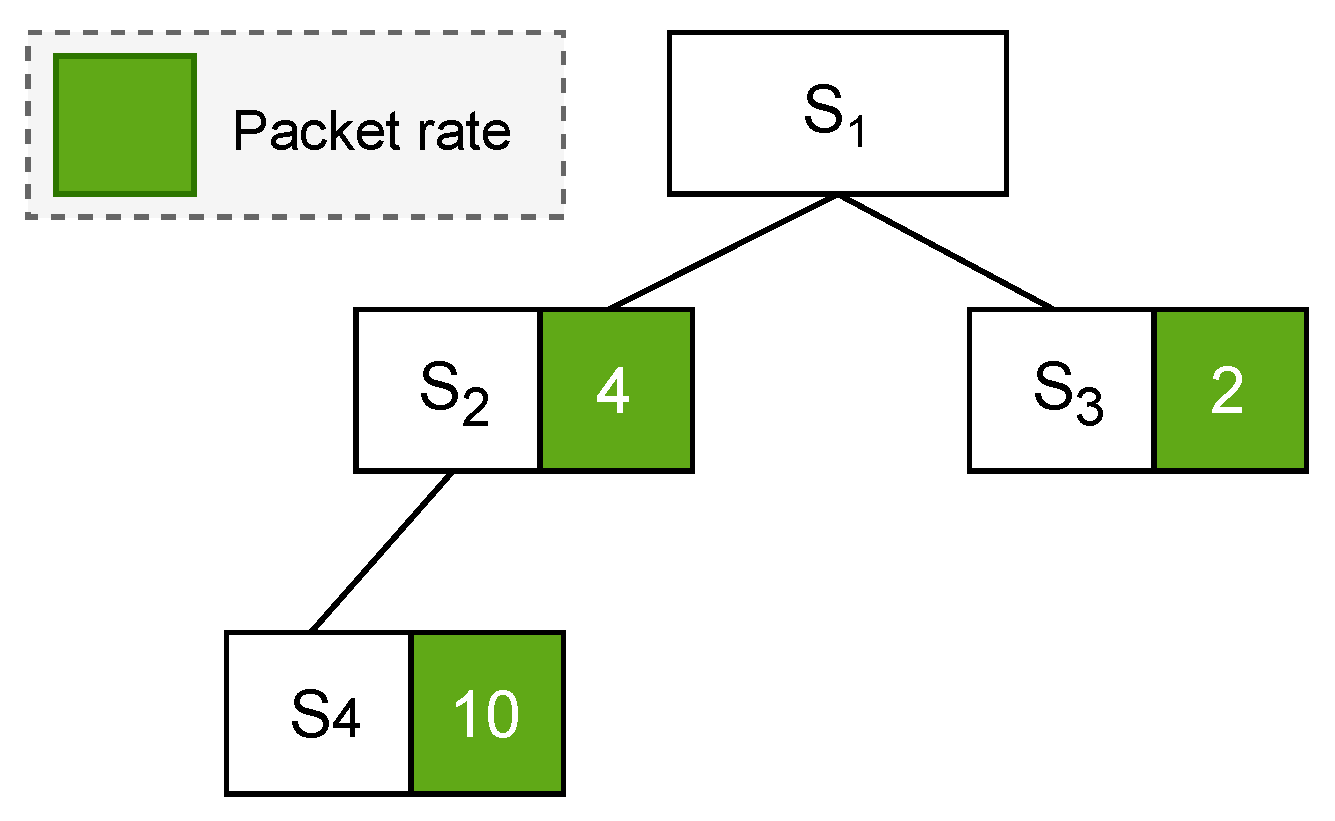
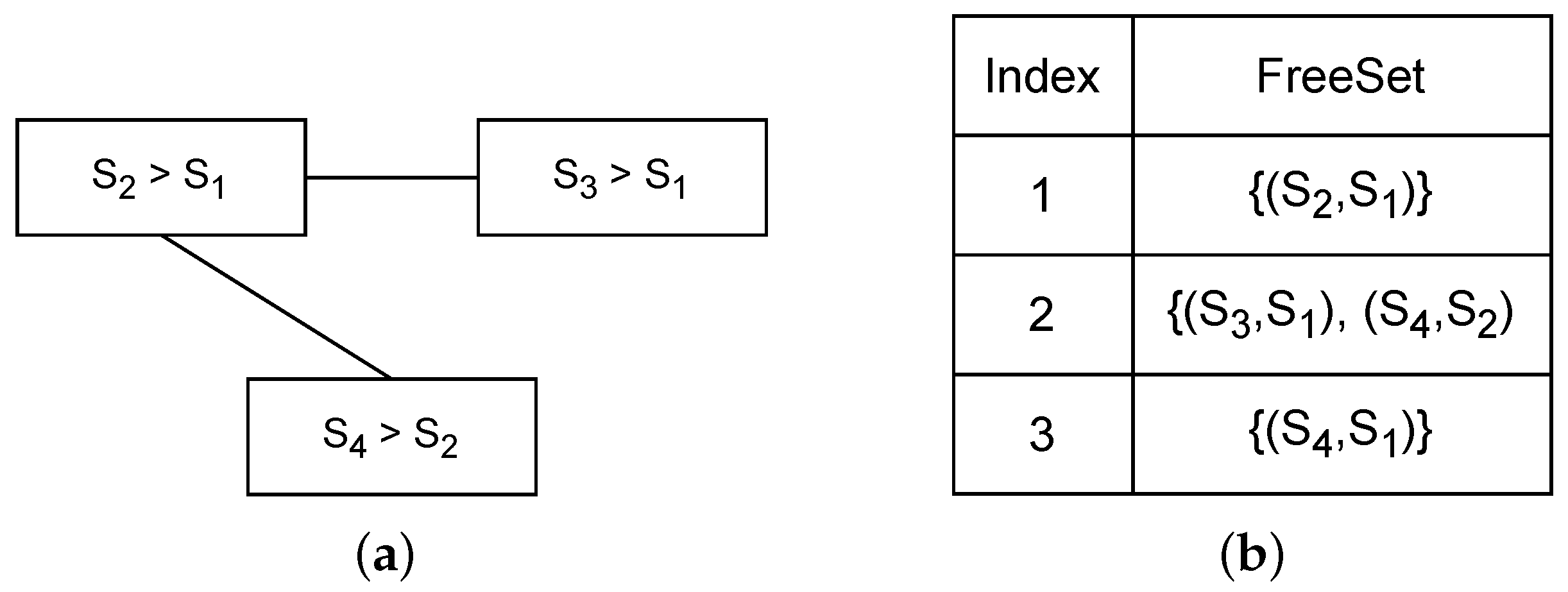
3.2.1. Create Collision- and Interference-Free Sets
3.2.2. Populate New TSCH Schedule
- When a node is scheduled to send and receive at the same time slot. For instance, if or , a collision will occur.
- When two nodes simultaneously transmit packets to the same recipient. For instance, if , this condition is met, resulting in a collision.
3.3. Termination Criteria
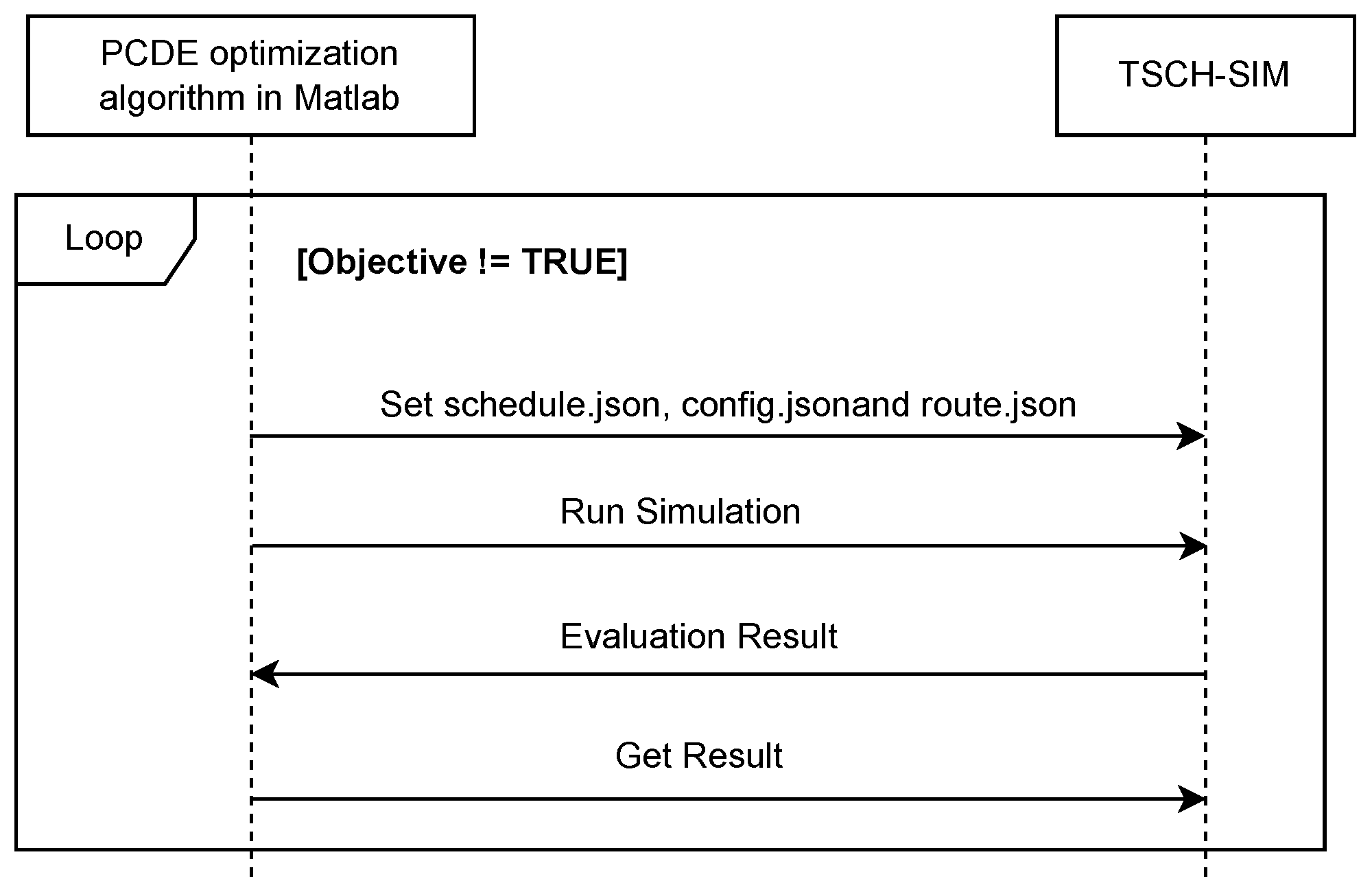
4. Experimental Setup
Evaluation Approach
5. Priority-Based Customized DE Optimization Algorithm Analysis
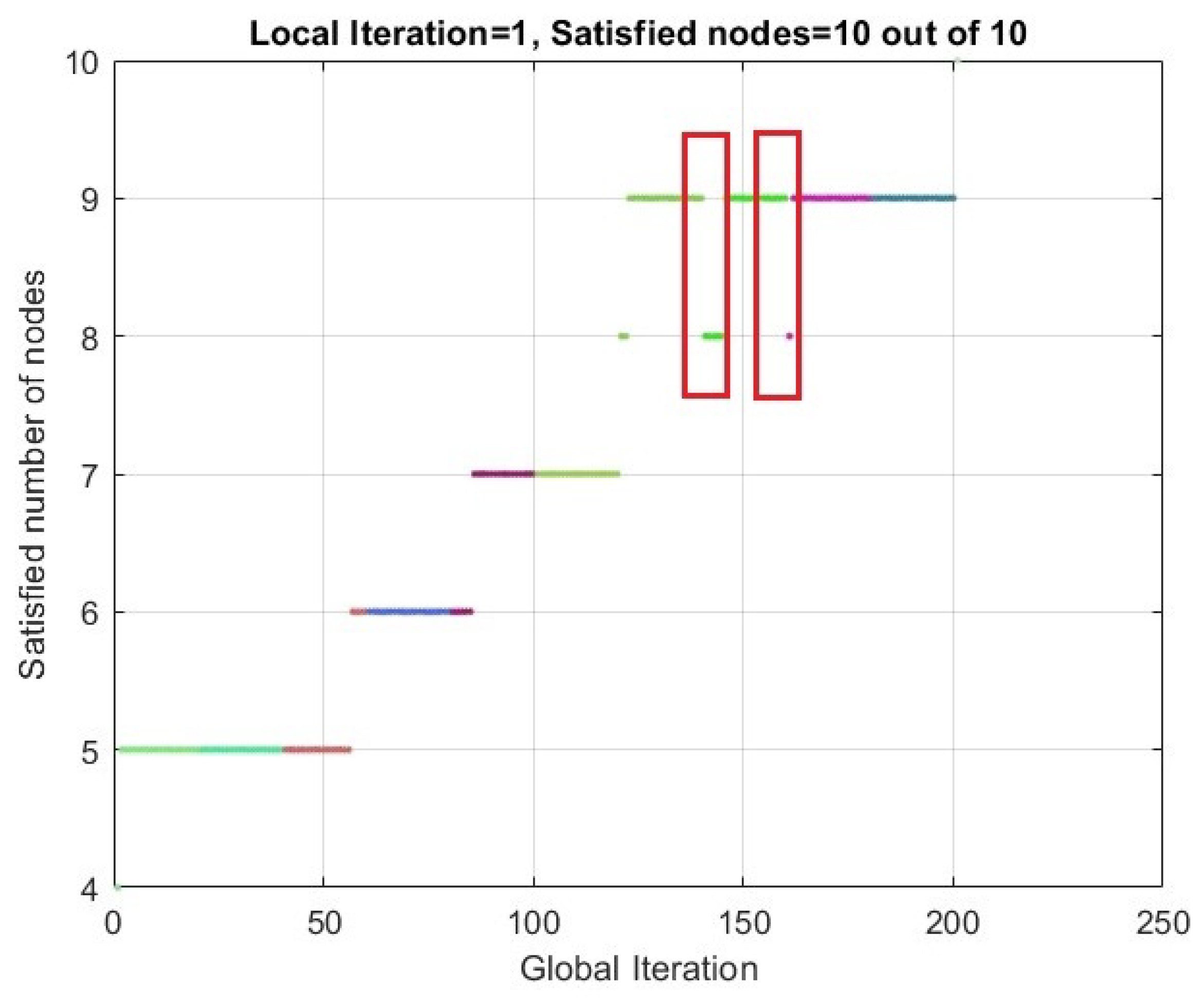
5.1. Fluctuation in Number of Satisfied Nodes
5.2. Overscheduling and Robustness
5.3. Local Iteration Value
6. Experiments Results
- Delay: Network delay refers to the total time (propagation, transmission, queuing, and processing period) a packet takes to travel from a source node to a destination node, and it is estimated in seconds. The delay is evaluated by taking the difference between the time a packet is generated and is successfully received by the root node. The average delay is calculated by utilizing Equation (2);
- Reliability: reliability relates to the network’s ability to transfer data successfully between the sender and receiver, and it is typically measured by using an end-to-end Packet Delivery Ratio (PDR).
- Throughput: throughput is influenced by the payload size, and it is calculated by the amount of data received successfully in a given time period, which is presented in the following formula:where N denotes the total number of packets and is the number of packets received by sensor .
- Time complexity: time complexity refers to the computational efficiency of an algorithm, specifically the amount of time it takes to execute and produce a solution that satisfies the specified requirements.
- Duty cycle: this metric is defined by calculating the ratio between the length of the schedule and the slotframe size.
- Slotframe size: the size of the slotframe plays a crucial role in determining the delay, and it is determined by the total number of time slots contained within the slotframe.
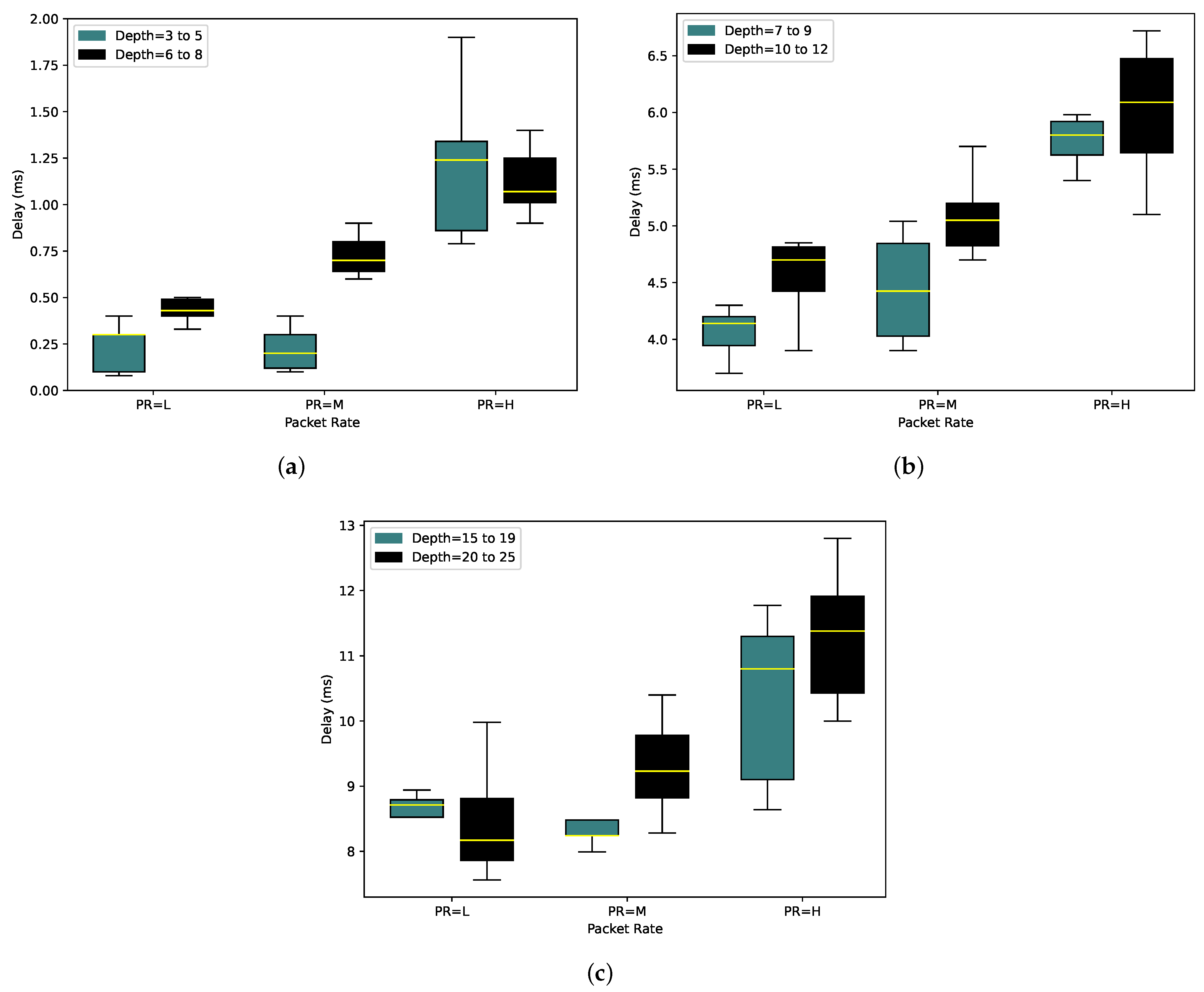
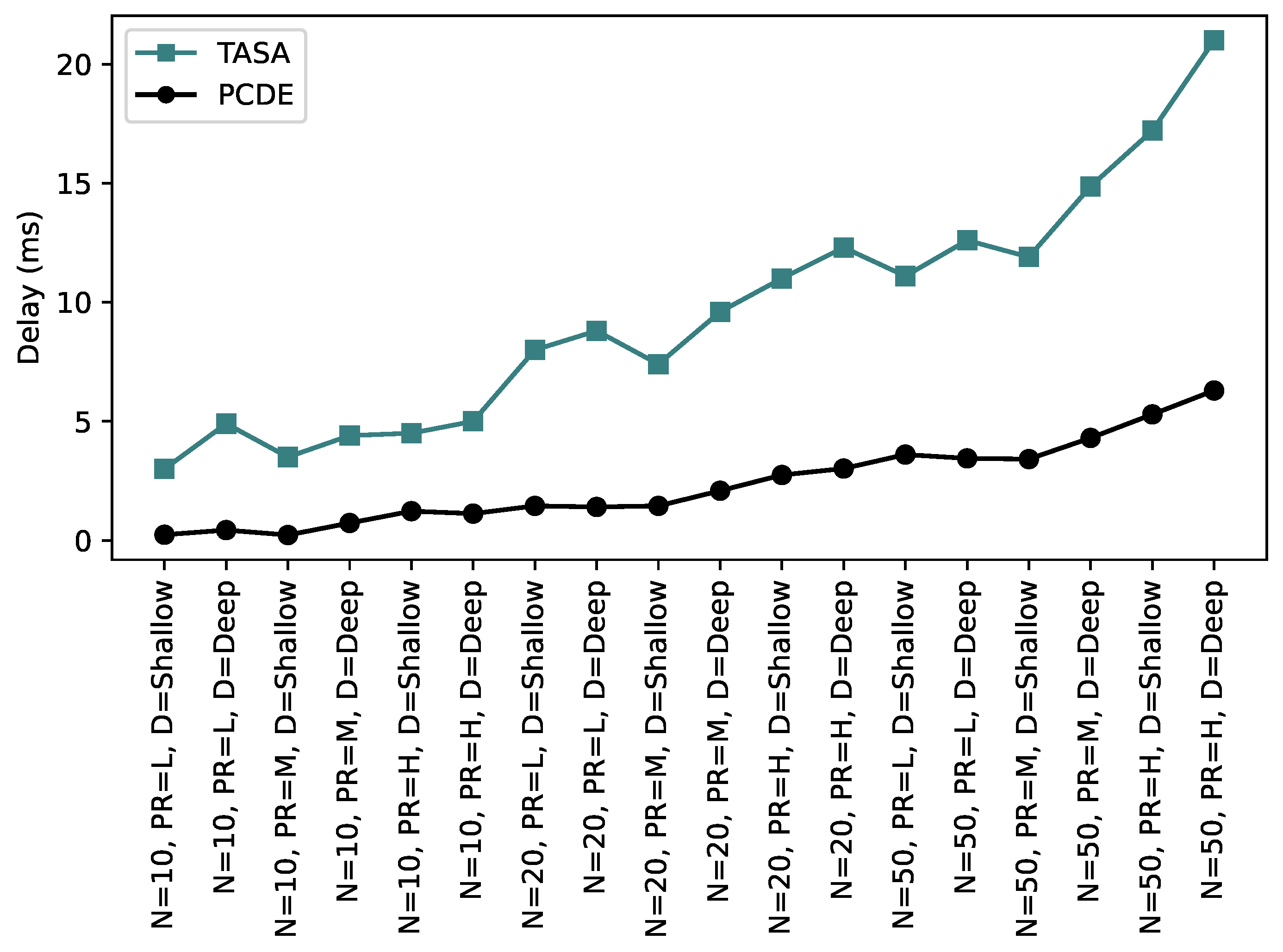
6.1. Experiment 1: Delay
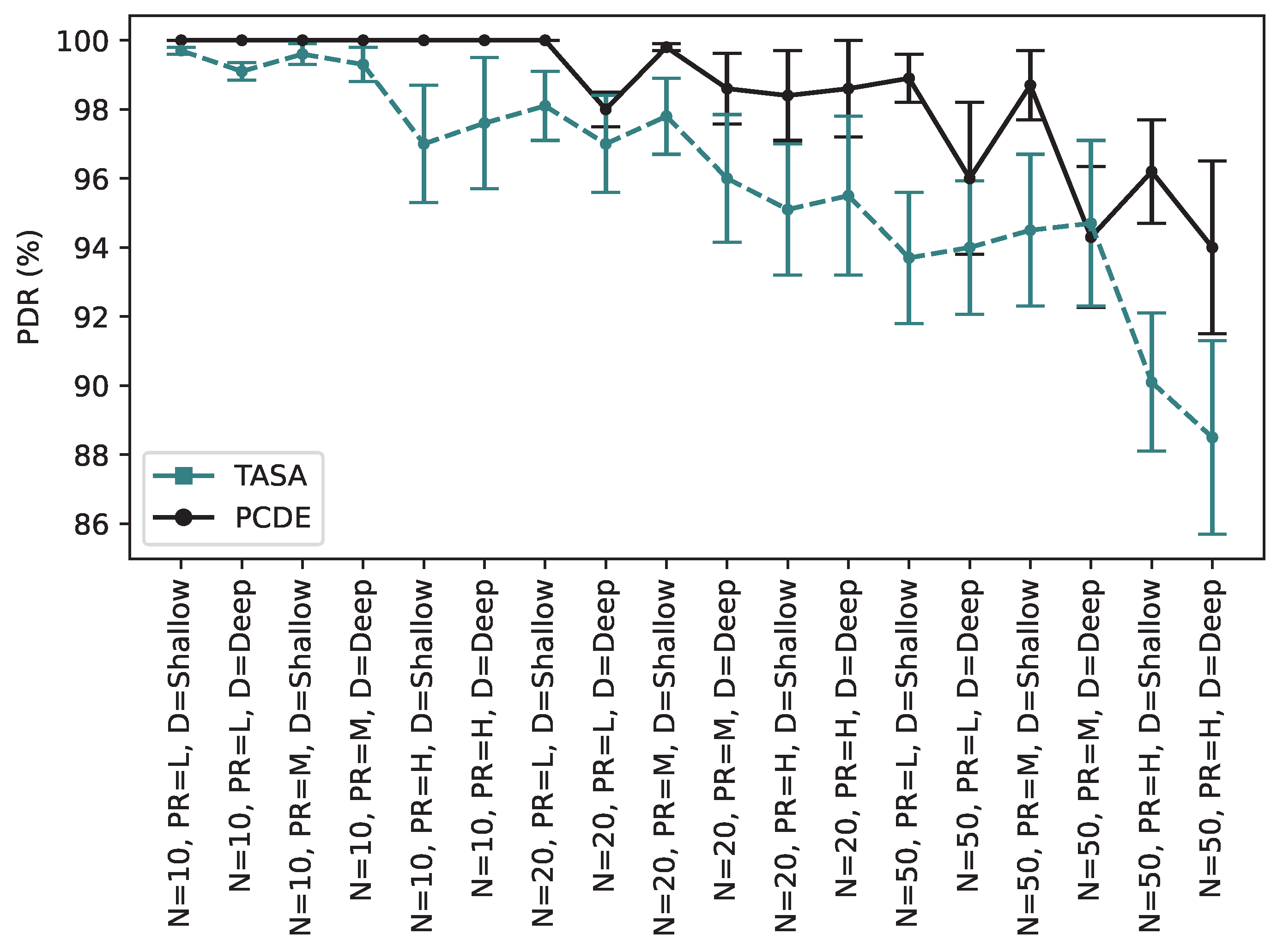
6.2. Experiment 2: Reliability
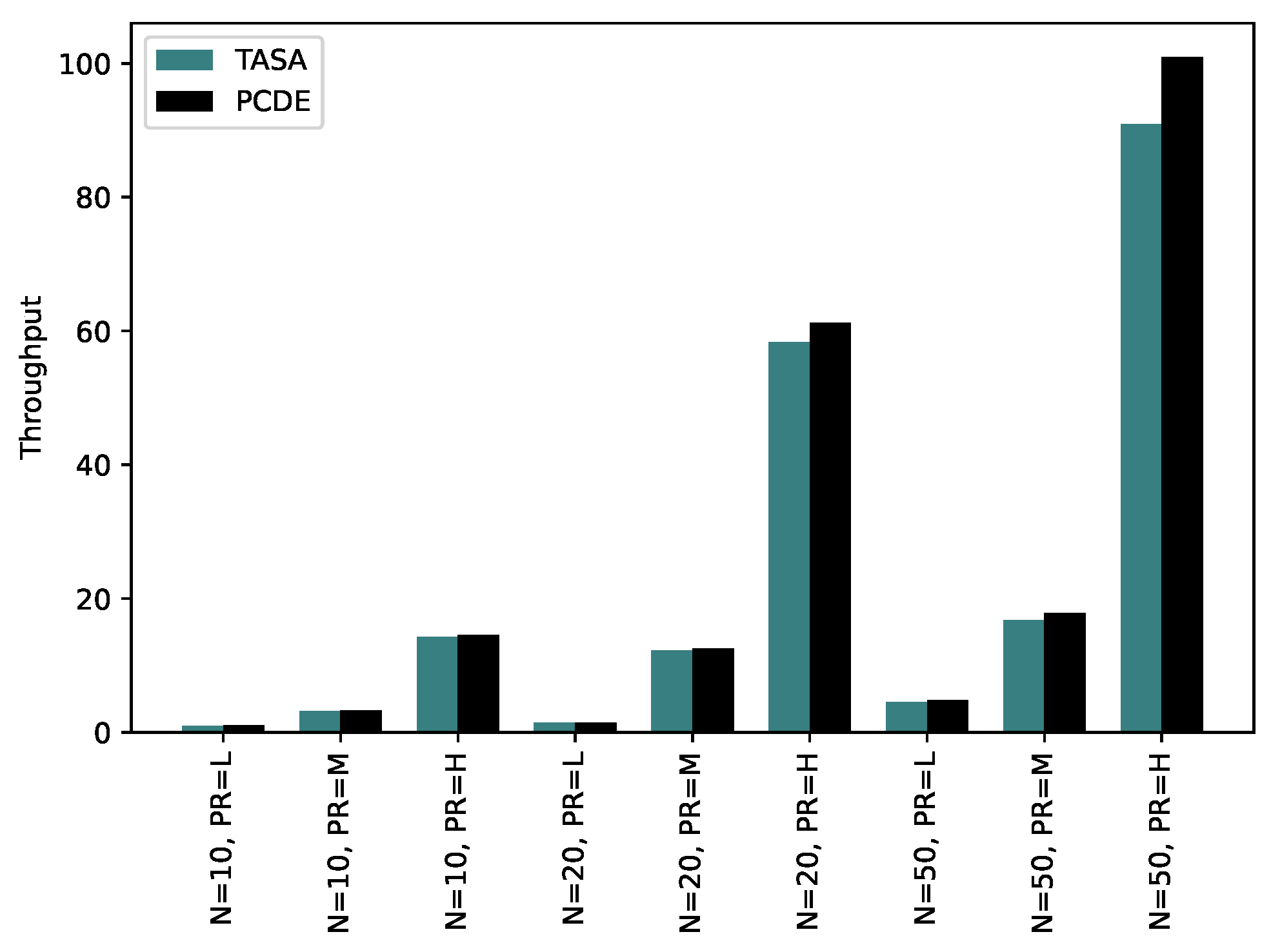
6.3. Experiment 3: Throughput
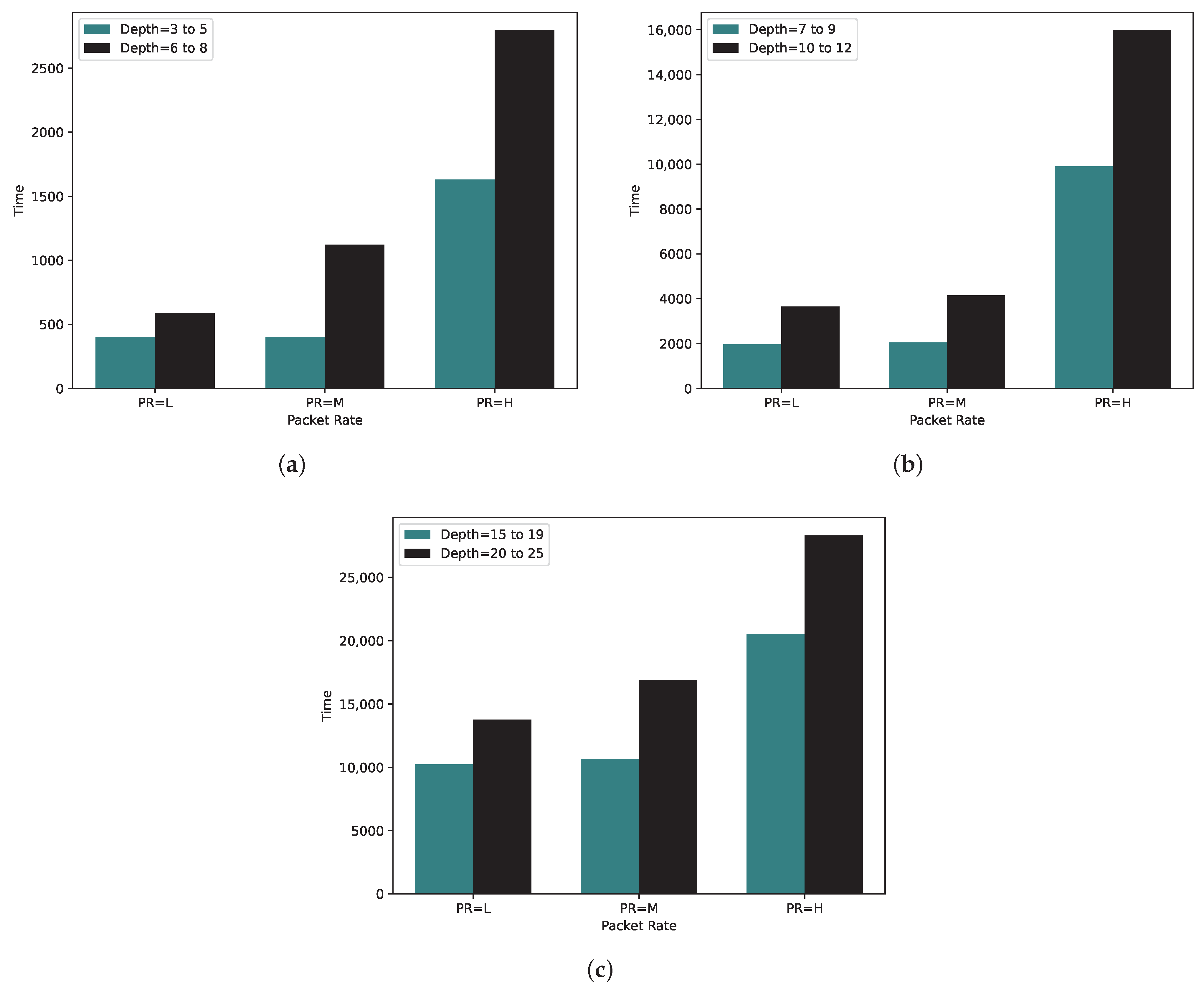
6.4. Experiment 4: Time Complexity
6.5. Experiment 5: Duty Cycle
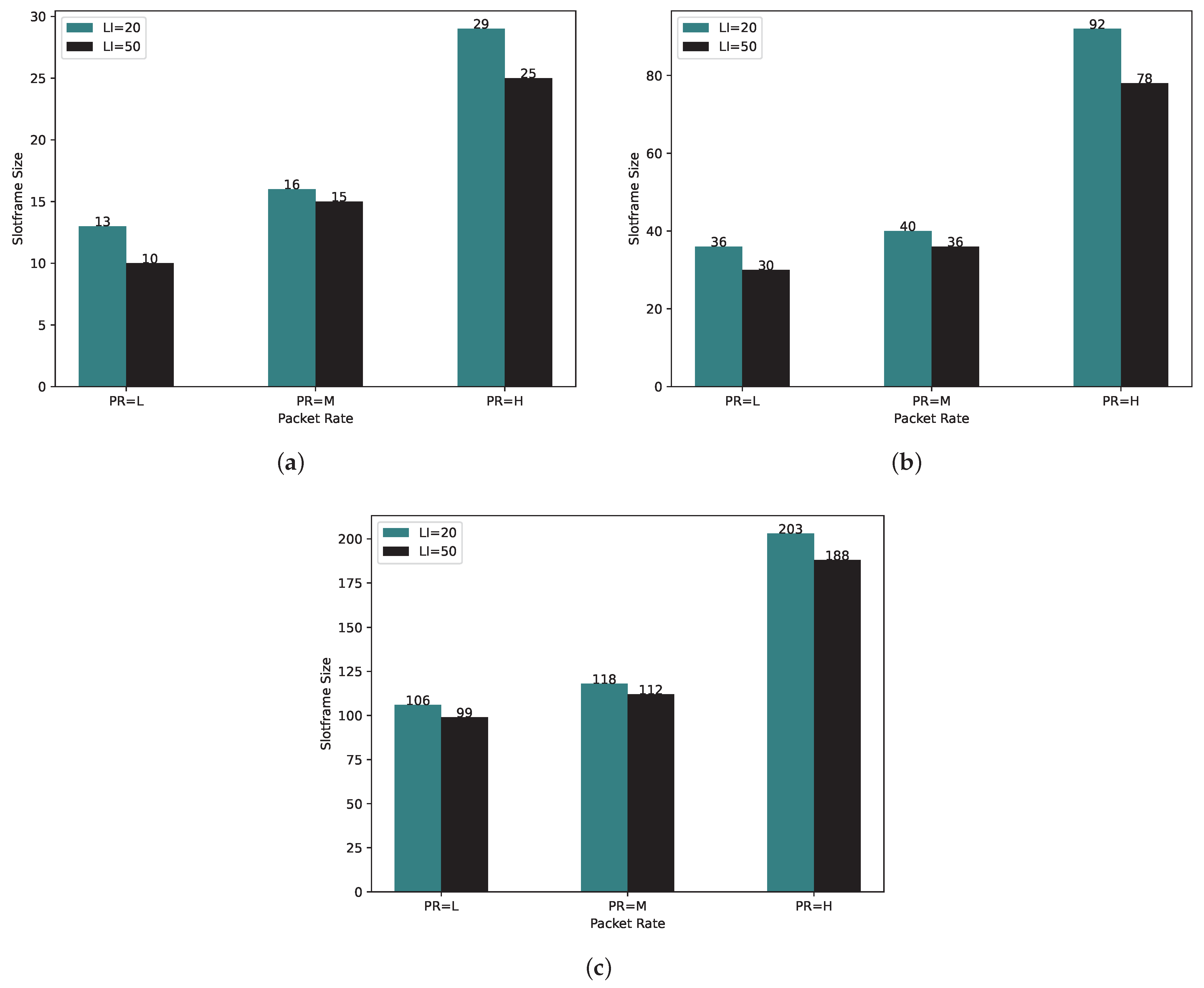
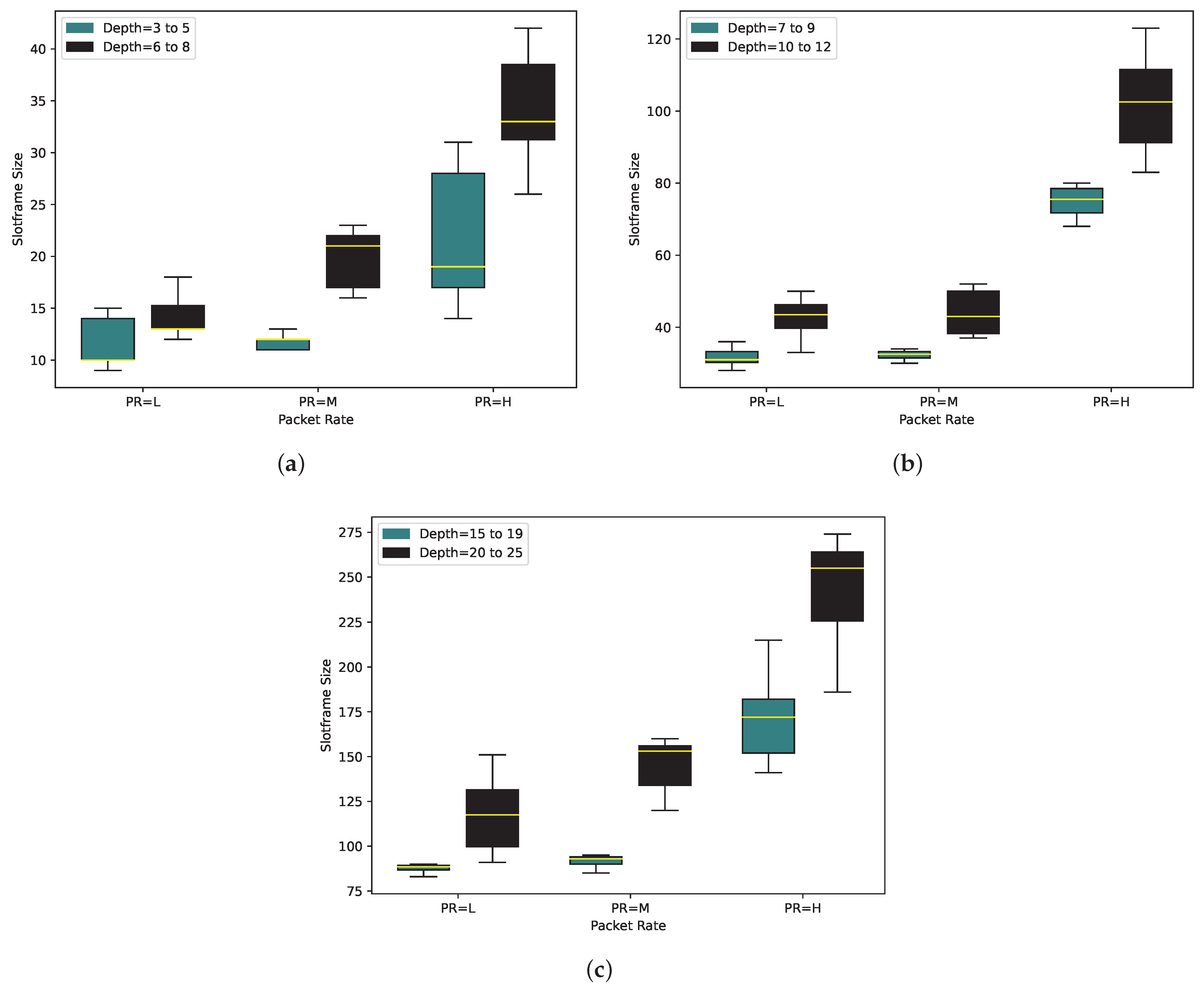
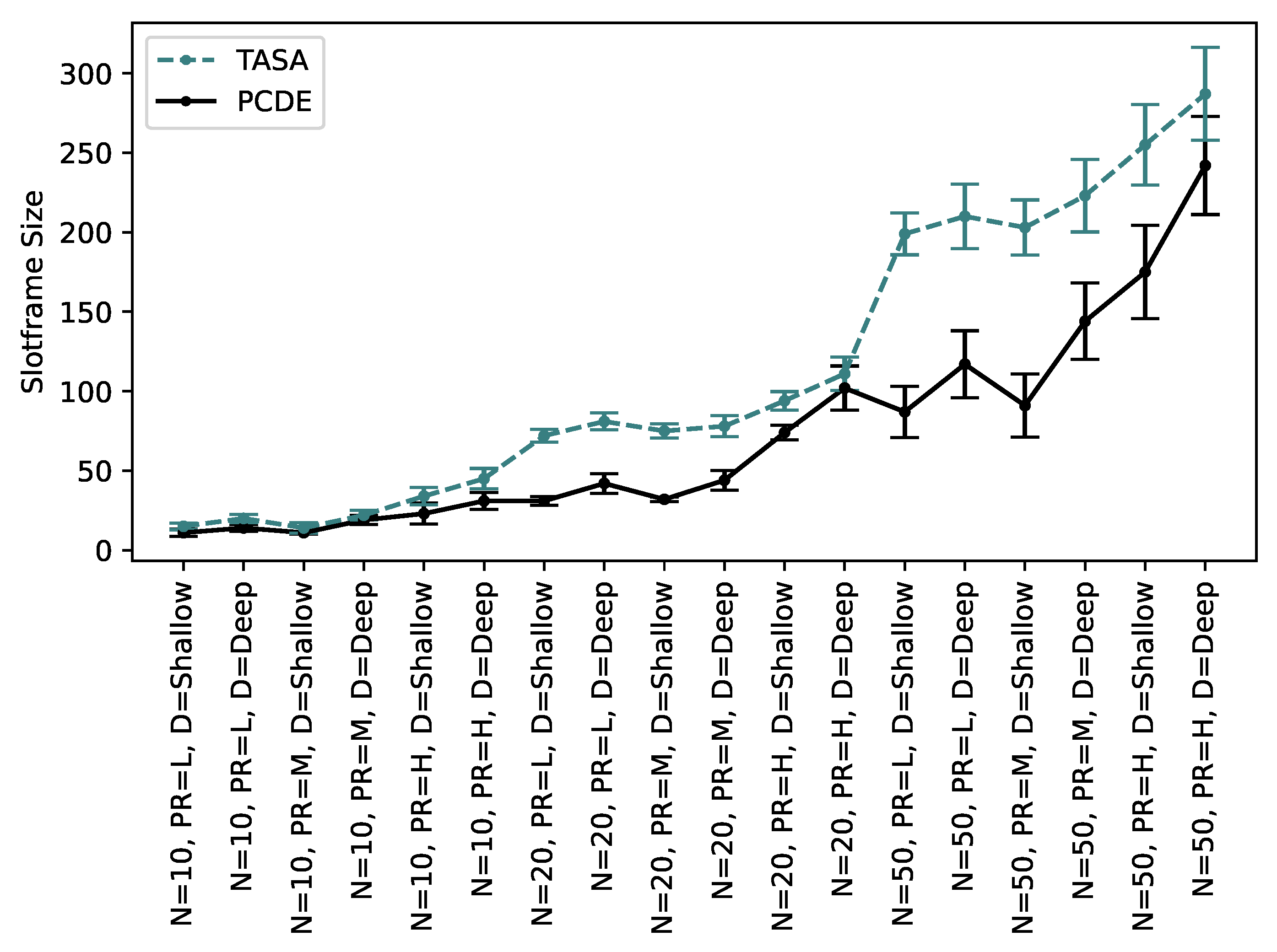
6.6. Experiment 6: Slotframe Size
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
- The following abbreviations are used in this manuscript:
| AMUS | Adaptive Multi-hop Scheduling |
| CDE | Customized Differential Evolution |
| CMAB | Combinatorial Multiarmed Bandit |
| DE | Differential Evolution |
| EP | Expected packet |
| FDMA | Frequency Division Multiple Access |
| LI | Local Iteration |
| LLR | Linear Learning Rewards |
| MAC | Medium Access Control |
| MST | Minimum Spanning Tree |
| OSCAR | Optimized Scheduling Cell Allocation Algorithm |
| PCDE | Priority-based Customized Differential Evolution |
| PDR | Packet Delivery Ratio |
| PR | Packet rate |
| TASA | Traffic-Aware Scheduling Algorithm |
| TDMA | Time Division Multiple Access |
| TSCH | Time-Slotted Channel Hopping |
References
- Watteyne, T.; Handziski, V.; Vilajosana, X.; Duquennoy, S.; Hahm, O.; Baccelli, E.; Wolisz, A. Industrial Wireless IP-Based Cyber–Physical Systems. Proc. IEEE 2016, 104, 1025–1038. [Google Scholar] [CrossRef]
- Ben, S.; Theoleyre, F.; Bouallegue, R. Performance Study of Co-Located IEEE 802.15.4-TSCH Networks: Interference and Coexistence. In Proceedings of the IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 513–518. [Google Scholar]
- Hammoudi, S.; Bentaleb, A.; Harous, S.; Aliouat, Z. Scheduling in IEEE 802.15.4e Time Slotted Channel Hopping: A Survey. In Proceedings of the 2020 11th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 28–31 October 2020; pp. 331–336. [Google Scholar]
- Kwon, J.H.; Kim, E.J.; Park, J.; Lim, Y.; Kim, Y.S.; Kim, D. Impact of Slotframe Length on End-to-End Delay in IEEE 802.15.4 TSCH Network. In Proceedings of the IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Bangkok, Thailand, 12–14 June 2019. [Google Scholar] [CrossRef]
- Abu-Khzam, F.N.; Bazgan, C.; Haddad, J.E.; Sikora, F. On the Complexity of QoS-Aware Service Selection Problem. In Proceedings of the International Conference on Service-Oriented Computing, Goa, India, 16–19 November 2015; pp. 345–352. [Google Scholar] [CrossRef]
- Ojo, M.; Giordano, S. An efficient centralized scheduling algorithm in IEEE 802.15.4e TSCH networks. In Proceedings of the 2016 IEEE Conference on Standards for Communications and Networking (CSCN), Berlin, Germany, 31 October–2 November 2016; pp. 1–6. [Google Scholar]
- Vatankhah, A.; Liscano, R. Differential Evolution Optimization of TSCH Scheduling for Heterogeneous Sensor Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference, Austin, TX, USA, 10–13 April 2022. [Google Scholar] [CrossRef]
- Vatankhah, A.; Liscano, R.; Ara, T. TSCH Slotframe Optimization using Differential Evolution Algorithm for Heterogeneous Sensor Networks. In Proceedings of the 12th International Conference on Sensor Networks, Lisbon, Portugal, 23–24 February 2023; pp. 57–66. [Google Scholar] [CrossRef]
- Urke, A.R.; Kure, Ø.; Øvsthus, K. A Survey of 802.15.4 TSCH Schedulers for a Standardized Industrial Internet of Things. Sensors 2021, 22, 15. [Google Scholar] [CrossRef]
- Soua, R.; Minet, P.; Livolant, E. Wave: A Distributed Scheduling Algorithm for Convergecast in IEEE 802.15.4e Tsch Networks. Trans. Emerg. Telecommun. Technol. 2015, 27, 557–575. [Google Scholar] [CrossRef]
- Daneels, G.; Spinnewyn, B.; Latré, S.; Famaey, J. RESF: Recurrent Low-Latency Scheduling in IEEE 802.15.4e TSCH Networks. Ad Hoc Netw. 2018, 69, 100–114. [Google Scholar] [CrossRef]
- Hamza, T.; Kaddoum, G. Enhanced Minimal Scheduling Function for IEEE 802.15.4e TSCH Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Van Der Lee, T.; Liotta, A.; Exarchakos, G. TSCH Schedules Assessment. In Proceedings of the IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 696–701. [Google Scholar] [CrossRef]
- Kim, S.; Kim, H.; Kim, C. ALICE: Autonomous Link-based Cell Scheduling for TSCH. In Proceedings of the 2019 18th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Montreal, QC, Canada, 15–18 April 2019; pp. 121–132. [Google Scholar]
- Minet, P.; Soua, Z.; Khoufi, I. An Adaptive Schedule for TSCH Networks in the Industry 4.0. In Proceedings of the IFIP/IEEE International Conference on Performance Evaluation and Modeling in Wired and Wireless Networks (PEMWN), Toulouse, France, 26–28 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Khoufi, I.; Minet, P.; Rmili, B. Scheduling Transmissions with Latency Constraints in an IEEE 802.15.4e TSCH Network. In Proceedings of the IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Amini, R.; Imani, M.; Todorov, P.; Ali, M. Performance Evaluation of Orchestra Scheduling in Time-Slotted Channel Hopping Networks. In Proceedings of the 10th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 29–30 October 2020. [Google Scholar] [CrossRef]
- Osman, M.; Nabki, F. OSCAR: An Optimized Scheduling Cell Allocation Algorithm for Convergecast in IEEE 802.15.4e TSCH Networks. Sensors 2021, 21, 2493. [Google Scholar] [CrossRef]
- Deac, D.; Teshome, E.; Van Glabbeek, R.; Dobrota, V.; Braeken, A.; Steenhaut, K. Traffic Aware Scheduler for Time-Slotted Channel-Hopping-Based IPv6 Wireless Sensor Networks. Sensors 2022, 22, 6397. [Google Scholar] [CrossRef]
- Jin, Y.; Kulkarni, P.; Wilcox, J.; Sooriyabandara, M. A Centralized Scheduling Algorithm for IEEE 802.15.4e TSCH Based Industrial Low Power Wireless Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Tinka, A.; Watteyne, T.; Pister, K. A Decentralized Scheduling Algorithm for Time Synchronized Channel Hopping in Ad Hoc Networks; Springer: Berlin/Heidelberg, Germany, 2010; pp. 201–216. [Google Scholar]
- Palattella, M.R.; Accettura, N.; Dohler, M.; Grieco, L.; Boggia, G. Traffic Aware Scheduling Algorithm for Reliable Low-Power Multi-Hop IEEE 802.15.4e Networks. In Proceedings of the IEEE 23rd International Symposium on Personal, Indoor and Mobile Radio Communications—(PIMRC), Sydney, NSW, Australia, 9–12 September 2012; pp. 327–332. [Google Scholar] [CrossRef]
- Taheri Javan, N.; Sabaei, M.; Hakami, V. IEEE 802.15.4.E TSCH-Based Scheduling for Throughput Optimization: A combinatorial Multi-Armed Bandit Approach. IEEE Sens. J. 2020, 20, 525–537. [Google Scholar] [CrossRef]
- Fafoutis, X.; Elsts, A.; Oikonomou, G.; Piechocki, R.; Craddock, I. Adaptive Static Scheduling in IEEE 802.15.4 TSCH Networks. In Proceedings of the IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 263–268. [Google Scholar] [CrossRef]
- Pradana, A.; Komarudin, K.; Moeis, A.; Hidayatno, A. Scheduling Optimization Using Differential Evolution. In Proceedings of the Conference: 4th International Seminar on Industrial Engineering and Management, Lombok, Indonesia, 1–4 December 2010. [Google Scholar]
- Tanenbaum, A.; Feamster, N.; Wetherall, D. Computer Networks; Pearson: London, UK, 2022. [Google Scholar]
- Elsts, A. TSCH-SIM: Scaling up simulations of TSCH and 6tisch networks. Sensors 2020, 20, 5663. [Google Scholar] [CrossRef] [PubMed]
- Ara, T.; Vatankhah, A.; Liscano, R. Enhancement of the TSCH-SIM Simulator to Support Manual Scheduling and Routing. Procedia Comput. Sci. 2022, 203, 61–68. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Number of Nodes | Depth | AVGNBR | Packet Rate |
|---|---|---|---|---|
| Scenario 1 | 10 | 3 to 5 | 3 | L |
| Scenario 2 | 10 | 6 to 8 | 2 | L |
| Scenario 3 | 10 | 3 to 5 | 3 | M |
| Scenario 4 | 10 | 6 to 8 | 2 | M |
| Scenario 5 | 10 | 3 to 5 | 3 | H |
| Scenario 6 | 10 | 6 to 8 | 2 | H |
| Scenario 7 | 20 | 7 to 9 | 8 | L |
| Scenario 8 | 20 | 10 to 12 | 6 | L |
| Scenario 9 | 20 | 7 to 9 | 8 | M |
| Scenario 10 | 20 | 10 to 12 | 6 | M |
| Scenario 11 | 20 | 7 to 9 | 8 | H |
| Scenario 12 | 20 | 10 to 12 | 6 | H |
| Scenario 13 | 50 | 15 to 19 | 15 | L |
| Scenario 14 | 50 | 20 to 25 | 9 | L |
| Scenario 15 | 50 | 15 to 19 | 15 | M |
| Scenario 16 | 50 | 20 to 25 | 9 | M |
| Scenario 17 | 50 | 15 to 19 | 15 | H |
| Scenario 18 | 50 | 20 to 25 | 9 | H |
| Parameter | Description | Range |
|---|---|---|
| A | Target Area | 200 ∗ 200 m2 |
| N | Total number of nodes | 10, 20, 50 |
| Sensor with ID i | ||
| Average number of neighbors for each node | Varies by topology and N value | |
| Packet rate | L, M, H | |
| R | Sensing range of node | 40 m |
| Number of channel offset | 4 | |
| D | Depth of tree | Varies by topology and N value |
| Maximum number of Local Iterations | 20, 50 |
| Parameter | Value |
|---|---|
| SIMULATION_DURATION | 3000 s |
| APP_WARMUP_PERIOD_SECOND | 1500 s |
| LINK_MODEL | Logistic Loss |
| APP_PACKET_SIZE | 100 |
| MAC_MAX_RETRIES | 7 |
| MAC_QUEUE_SIZE | 20 |
| LOGISTICLOSS_TRANSMIT_RANGE_M | 40 m |
| TSCH_SCHEDULE_DEFAULT_LENGTH | Derived slotframe size |
| ROUTING_ALGORITHM | ManualRouting |
| SCHEDULING_ALGORITHM | ManualScheduler |
| TIME_SLOT_DURATION | 10 ms |
| Scenario | Delay (ms) | PDR | Throughput | Time | Duty Cycle | Slotframe Size |
|---|---|---|---|---|---|---|
| Scenario 1 | 0.23 | 100% | 1.1 | 401 | 100% | 11 |
| Scenario 2 | 0.43 | 100% | 1.17 | 544 | 100% | 14 |
| Scenario 3 | 0.22 | 100% | 1.6 | 399 | 100% | 11 |
| Scenario 4 | 0.7 | 100% | 1.48 | 1122 | 100% | 19 |
| Scenario 5 | 1.23 | 100% | 8.37 | 1629 | 100% | 23 |
| Scenario 6 | 1.14 | 100% | 9.34 | 2902 | 100% | 31 |
| Scenario 7 | 1.44 | 100% | 2.48 | 1969 | 100% | 32 |
| Scenario 8 | 1.4 | 98% | 2.59 | 3647 | 100% | 43 |
| Scenario 9 | 1.42 | 99.8% | 9.03 | 2040 | 100% | 32 |
| Scenario 10 | 2.08 | 98.6% | 5.74 | 4154 | 100% | 44 |
| Scenario 11 | 2.7 | 98.4% | 11.43 | 9903 | 100% | 75 |
| Scenario 12 | 3 | 98.6% | 11.5 | 15,980 | 100% | 105 |
| Scenario 13 | 0.2 | 98.9% | 0.7 | 10,225 | 100% | 88 |
| Scenario 14 | 0.23 | 96% | 0.89 | 13,769 | 100% | 118 |
| Scenario 15 | 0.3 | 98.7% | 6.66 | 10,680 | 100% | 92 |
| Scenario 16 | 0.45 | 94.3% | 1.35 | 16,897 | 100% | 144 |
| Scenario 17 | 1.2 | 96.2% | 2.67 | 20,554 | 100% | 176 |
| Scenario 18 | 1.5 | 94% | 3.5 | 28,299 | 100% | 244 |
| Scenario | Delay (ms) | PDR | Throughput | Duty Cycle | Slotframe Size |
|---|---|---|---|---|---|
| Scenario 1 | 3 | 99.5% | 0.9 | 100% | 15 |
| Scenario 2 | 4.9 | 99.1% | 0.88 | 100% | 20 |
| Scenario 3 | 3.5 | 99.6% | 1.5 | 100% | 14 |
| Scenario 4 | 4.4 | 99.3% | 1.38 | 100% | 22 |
| Scenario 5 | 4.5 | 97% | 7.6 | 100% | 34 |
| Scenario 6 | 5 | 97.6% | 7.01 | 100% | 45 |
| Scenario 7 | 8 | 98.1% | 1.5 | 100% | 72 |
| Scenario 8 | 8.8 | 97% | 1.8 | 100% | 81 |
| Scenario 9 | 7.4 | 97.8% | 5.9 | 100% | 75 |
| Scenario 10 | 9.6 | 96% | 4.8 | 100% | 78 |
| Scenario 11 | 11 | 95.1% | 8.87 | 100% | 94 |
| Scenario 12 | 12.3 | 95.5% | 8.4 | 100% | 111 |
| Scenario 13 | 11.1 | 93.7% | 1.9 | 100% | 199 |
| Scenario 14 | 12.6 | 94% | 1.6 | 100% | 210 |
| Scenario 15 | 11.9 | 94.5% | 6.66 | 100% | 203 |
| Scenario 16 | 14.87 | 94.7% | 1.35 | 100% | 223 |
| Scenario 17 | 17.2 | 90.1% | 2.67 | 100% | 255 |
| Scenario 18 | 21 | 88.5% | 3.5 | 100% | 287 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vatankhah, A.; Liscano, R. Comparative Analysis of Time-Slotted Channel Hopping Schedule Optimization Using Priority-Based Customized Differential Evolution Algorithm in Heterogeneous IoT Networks. Sensors 2024, 24, 1085. https://0-doi-org.brum.beds.ac.uk/10.3390/s24041085
Vatankhah A, Liscano R. Comparative Analysis of Time-Slotted Channel Hopping Schedule Optimization Using Priority-Based Customized Differential Evolution Algorithm in Heterogeneous IoT Networks. Sensors. 2024; 24(4):1085. https://0-doi-org.brum.beds.ac.uk/10.3390/s24041085
Chicago/Turabian StyleVatankhah, Aida, and Ramiro Liscano. 2024. "Comparative Analysis of Time-Slotted Channel Hopping Schedule Optimization Using Priority-Based Customized Differential Evolution Algorithm in Heterogeneous IoT Networks" Sensors 24, no. 4: 1085. https://0-doi-org.brum.beds.ac.uk/10.3390/s24041085