Strategically Patrolling in a Chemical Cluster Addressing Gas Pollutants’ Releases through a Game-Theoretic Model


Abstract
:1. Introduction
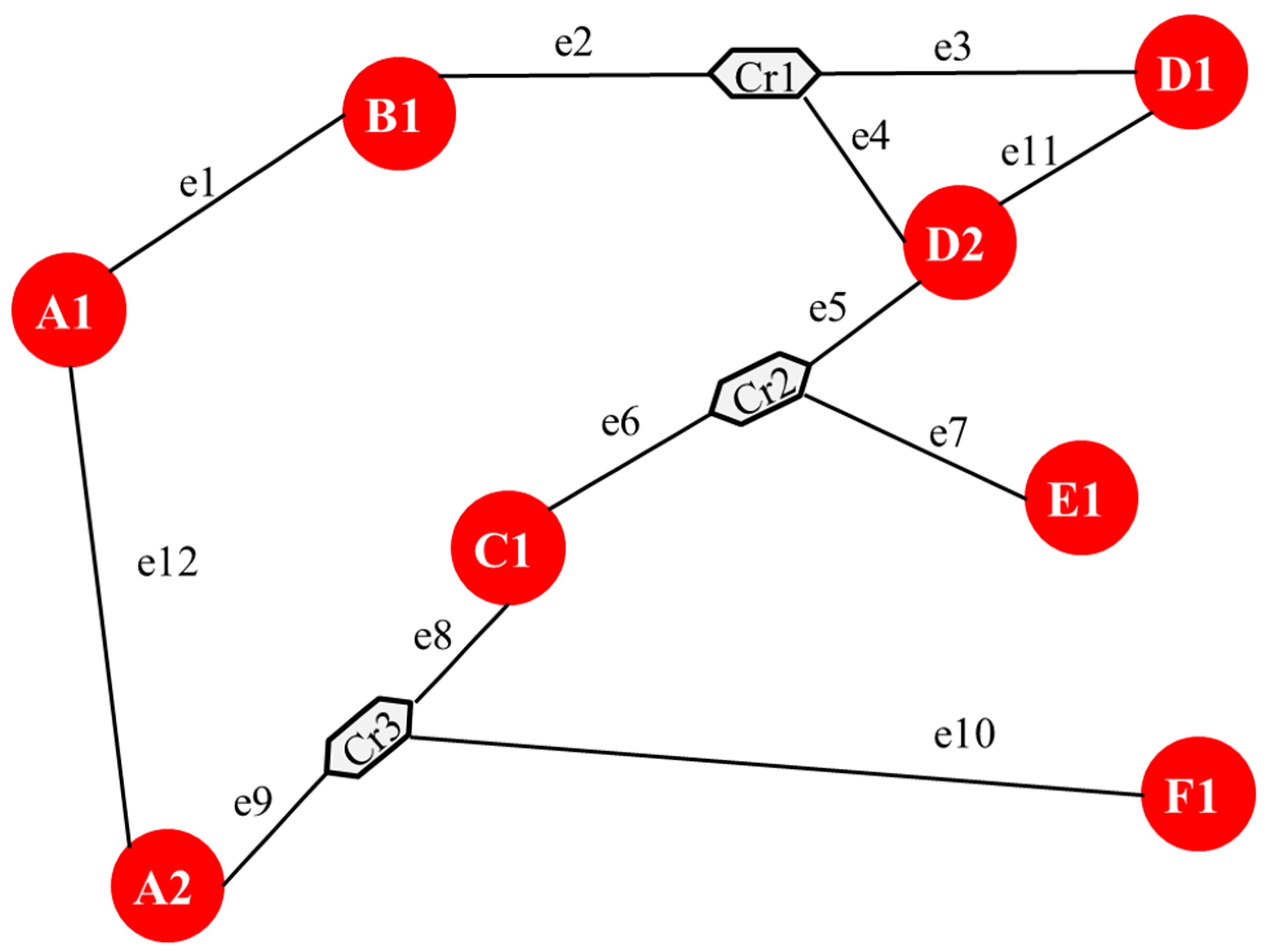
2. Road Network Modeling
2.1. Graphic Modeling
2.2. Time Discretization
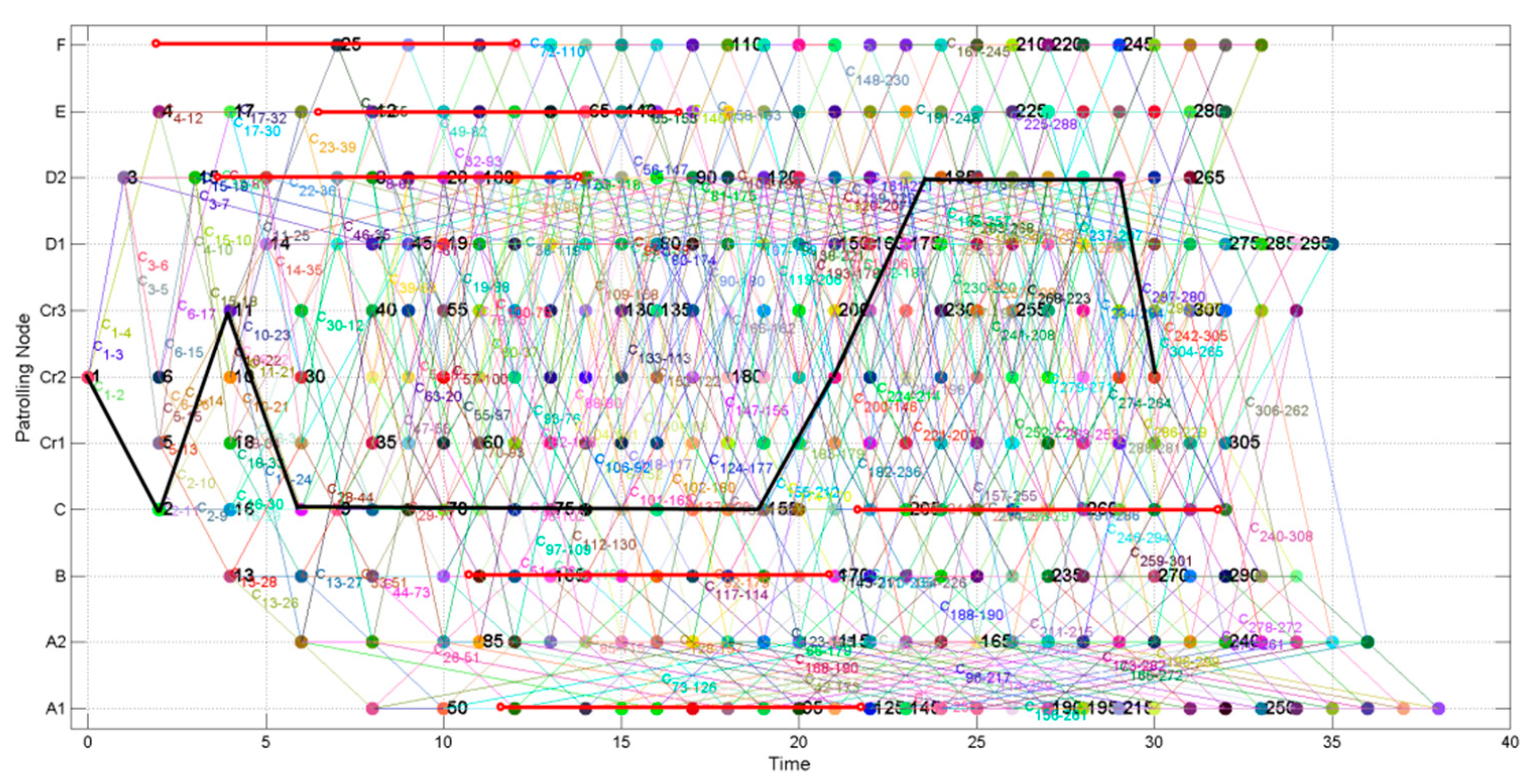
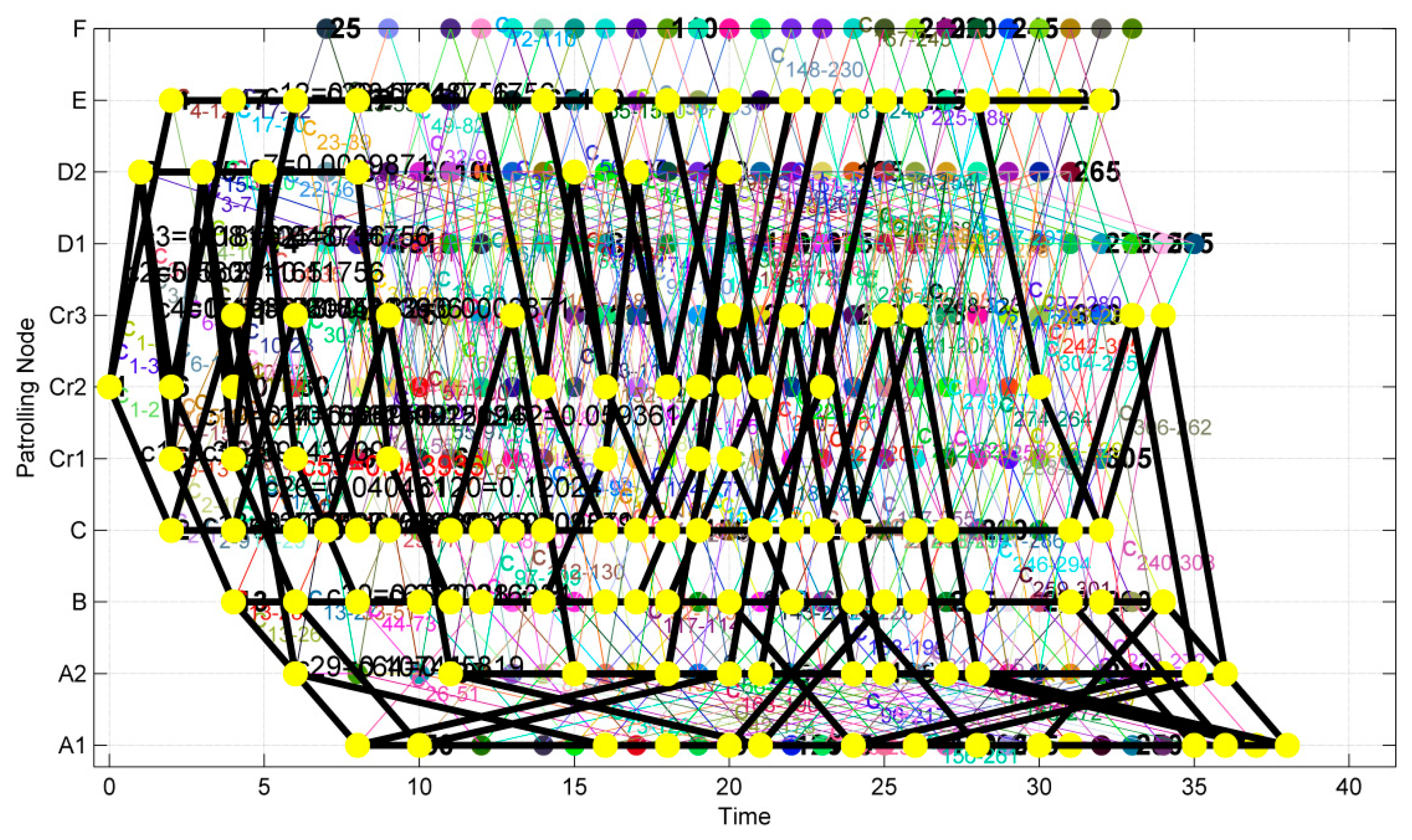
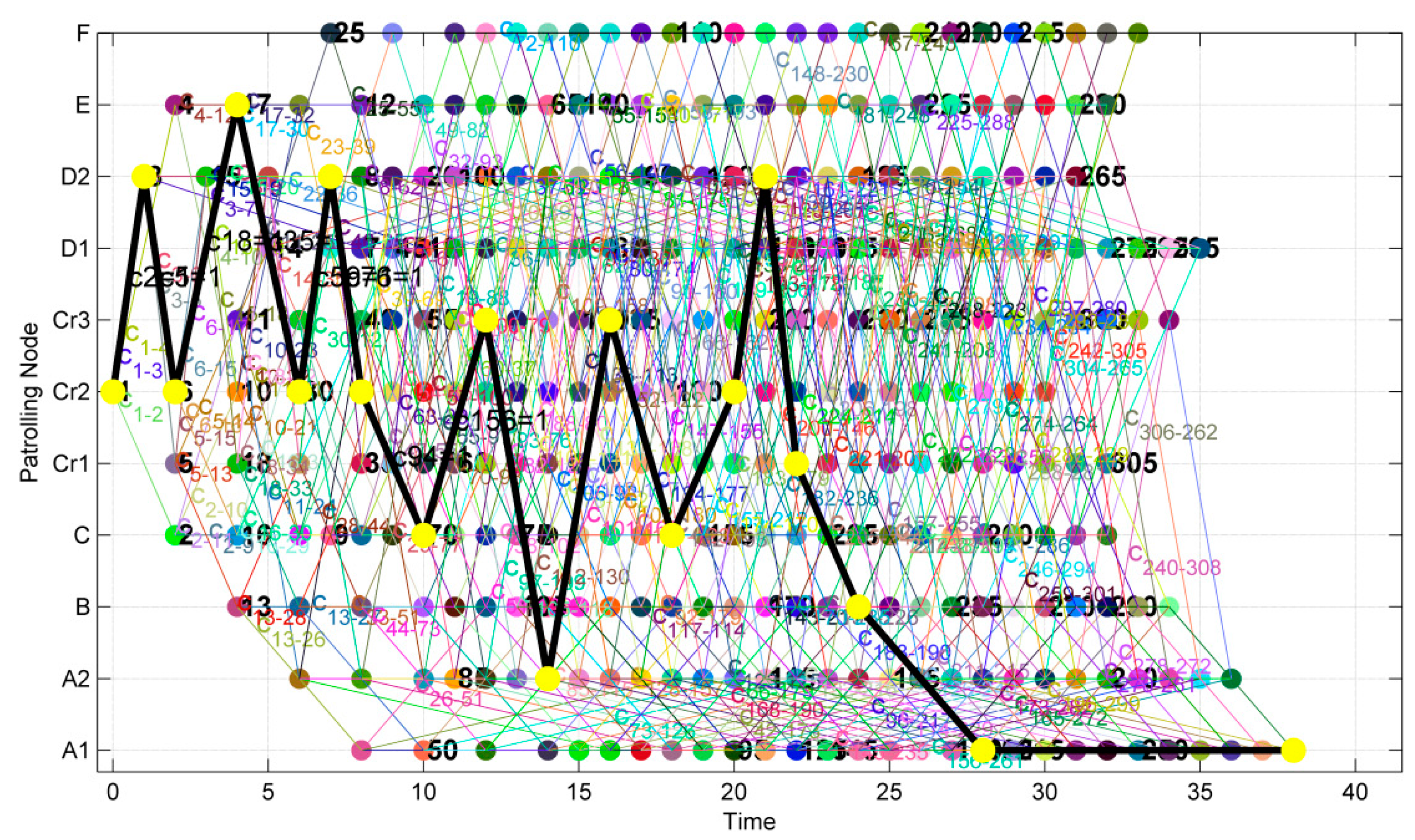
2.3. Transition Graph Modeling
3. Chemical Cluster Environmental Protection Patrolling Game
3.1. Players Modeling
3.2. Strategy Modeling
3.2.1. Attacker’s Strategy
3.2.2. Defender’s Strategy
3.3. Payoff Modeling
3.4. Game Solver and Solution Definition
4. An Illustrative Case Study of the CCEPP Game
4.1. Experimental Settings
4.2. Game Modeling
4.3. Results and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Edge Number | Probability | Edge Number | Probability | Edge Number | Probability | Edge Number | Probability |
|---|---|---|---|---|---|---|---|
| 1 | 0.35459 | 87 | 0.081704 | 334 | 0.02735 | 525 | 0.072912 |
| 2 | 0.5637 | 88 | 0.023407 | 342 | 0.019765 | 526 | 0.20611 |
| 3 | 0.081704 | 89 | 0.08403 | 343 | 0.06621 | 532 | 0.095759 |
| 4 | 0.47155 | 101 | 0.043936 | 350 | 0.019765 | 554 | 0.042508 |
| 5 | 0.091165 | 103 | 0.002519 | 357 | 0.000987 | 560 | 0.068729 |
| 7 | 0.000987 | 109 | 0.03989 | 358 | 0.12208 | 561 | 0.077698 |
| 8 | 0.25294 | 120 | 0.12024 | 359 | 0.010622 | 569 | 0.01157 |
| 10 | 0.10165 | 123 | 0.000987 | 378 | 0.023407 | 571 | 0.008337 |
| 12 | 0.081704 | 138 | 0.028038 | 383 | 0.08403 | 574 | 0.095759 |
| 13 | 0.13548 | 141 | 0.048756 | 393 | 0.033422 | 586 | 0.025925 |
| 15 | 0.33607 | 142 | 0.062431 | 394 | 0.025925 | 587 | 0.043588 |
| 16 | 0.042409 | 143 | 0.095759 | 396 | 0.012146 | 592 | 0.00899 |
| 18 | 0.048756 | 160 | 0.001831 | 397 | 0.004238 | 606 | 0.13706 |
| 19 | 0.21851 | 162 | 0.059361 | 398 | 0.068729 | 616 | 0.035621 |
| 20 | 0.11756 | 179 | 0.042544 | 409 | 0.029031 | 619 | 0.01157 |
| 25 | 0.11756 | 180 | 0.077698 | 424 | 0.00899 | 626 | 0.068729 |
| 26 | 0.040461 | 183 | 0.000987 | 425 | 0.0309 | 633 | 0.040461 |
| 27 | 0.061192 | 196 | 0.058217 | 432 | 0.000987 | 646 | 0.077222 |
| 29 | 0.10744 | 197 | 0.059346 | 437 | 0.010622 | 648 | 0.015833 |
| 30 | 0.028038 | 199 | 0.016384 | 442 | 0.030989 | 650 | 0.01578 |
| 32 | 0.03989 | 201 | 0.1327 | 444 | 0.031442 | 656 | 0.00899 |
| 34 | 0.002519 | 221 | 0.002519 | 447 | 0.095759 | 664 | 0.068729 |
| 36 | 0.048756 | 235 | 0.059361 | 454 | 0.011609 | 676 | 0.20611 |
| 37 | 0.17457 | 259 | 0.033514 | 458 | 0.077222 | 688 | 0.066995 |
| 39 | 0.043936 | 260 | 0.048191 | 459 | 0.008337 | 690 | 0.00899 |
| 43 | 0.043936 | 262 | 0.02417 | 460 | 0.015833 | 699 | 0.032276 |
| 47 | 0.061192 | 263 | 0.019765 | 465 | 0.004238 | 701 | 0.072912 |
| 51 | 0.11756 | 264 | 0.03989 | 469 | 0.08403 | 731 | 0.030989 |
| 52 | 0.040461 | 276 | 0.02552 | 473 | 0.033422 | 744 | 0.072912 |
| 55 | 0.043936 | 277 | 0.032697 | 474 | 0.006923 | 750 | 0.035621 |
| 62 | 0.002519 | 286 | 0.032697 | 476 | 0.035621 | 751 | 0.01578 |
| 64 | 0.15819 | 312 | 0.059361 | 479 | 0.077698 | 756 | 0.015833 |
| 65 | 0.016384 | 314 | 0.040461 | 494 | 0.01578 | 757 | 0.27902 |
| 67 | 0.1327 | 330 | 0.028038 | 495 | 0.01157 | 762 | 0.01578 |
| 69 | 0.12024 | 332 | 0.009266 | 505 | 0.042508 | 763 | 0.063265 |
| 82 | 0.000987 | 333 | 0.03949 | 522 | 0.032276 | 764 | 0.27902 |
References
- Reniers, G. An external domino effects investment approach to improve cross-plant safety within chemical clusters. J. Hazard. Mater. 2010, 177, 167–174. [Google Scholar] [CrossRef] [PubMed]
- Antoniou, F.; Koundouri, P.; Tsakiris, N. Information sharing and environmental policies. Int. J. Environ. Res. Public Health 2010, 7, 3561. [Google Scholar] [CrossRef] [PubMed]
- Shao, C.; Yang, J.; Tian, X.; Ju, M.; Huang, L. Integrated environmental risk assessment and whole-process management system in chemical industry parks. Int. J. Environ. Res. Public Health 2013, 10, 1609–1630. [Google Scholar] [CrossRef] [PubMed]
- Ma, D.; Tan, W.; Zhang, Z.; Hu, J. Parameter identification for continuous point emission source based on tikhonov regularization method coupled with particle swarm optimization algorithm. J. Hazard. Mater. 2017, 325, 239–250. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Song, G.; Yang, F.; Zhang, S.; Zhang, Y.; Liu, Z. Risk assessment and hierarchical risk management of enterprises in chemical industrial parks based on catastrophe theory. Int. J. Environ. Res. Public Health 2012, 9, 4386–4402. [Google Scholar] [CrossRef]
- Qiu, S.; Chen, B.; Wang, R.; Zhu, Z.; Wang, Y.; Qiu, X. Estimating contaminant source in chemical industry park using uav-based monitoring platform, artificial neural network and atmospheric dispersion simulation. RSC Adv. 2017, 7, 39726–39738. [Google Scholar] [CrossRef]
- Milind, T. Security and Game Theory: Algorithms, Deployed Systems, Lessons Learned; Cambridge University Press: New York, NY, USA, 2012. [Google Scholar]
- Zhang, L.; Reniers, G.; Chen, B.; Qiu, X. CCP game: A game theoretical model for improving the scheduling of chemical cluster patrolling. Reliab. Eng. Syst. Saf. 2018. [Google Scholar] [CrossRef]
- Pita, J.; Jain, M.; Marecki, J.; Ordóñez, F.; Portway, C.; Tambe, M.; Western, C.; Paruchuri, P.; Kraus, S. Deployed armor protection: The application of a game theoretic model for security at the los angeles international airport. In Proceedings of the 7th International Joint Conference on Autonomous Agents and Multiagent Systems: Industrial Track, Estoril, Portugal, 12–16 May 2008; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2008; pp. 125–132. [Google Scholar]
- Shieh, E.; An, B.; Yang, R.; Tambe, M.; Baldwin, C.; DiRenzo, J.; Maule, B.; Meyer, G. Protect: A deployed game theoretic system to protect the ports of the united states. In Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems, Valencia, Spain, 4–8 June 2012; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2012; pp. 13–20. [Google Scholar]
- Yin, Z.; Jiang, A.X.; Tambe, M.; Kiekintveld, C.; Leyton-Brown, K.; Sandholm, T.; Sullivan, J.P. Trusts: Scheduling randomized patrols for fare inspection in transit systems using game theory. AI Mag. 2012, 33, 59–72. [Google Scholar] [CrossRef]
- Aguirre, O.; Taboada, H. An evolutionary game theory approach for intelligent patrolling. Procedia Comput. Sci. 2012, 12, 140–145. [Google Scholar] [CrossRef]
- Basilico, N.; Gatti, N.; Amigoni, F. Patrolling security games: Definition and algorithms for solving large instances with single patroller and single intruder. Artif. Intell. 2012, 184–185, 78–123. [Google Scholar] [CrossRef]
- Gatti, N. Game theoretical insights in strategic patrolling: Model and algorithm in normal-form. In Proceedings of the 2008 Conference on ECAI 2008 18th European Conference on Artificial Intelligence, Amsterdam, The Netherlands, 21–25 July; IOS Press: Amsterdam, The Netherlands, 2008; pp. 403–407. [Google Scholar]
- Alpern, S.; Morton, A.; Papadaki, K. Patrolling games. Oper. Res. 2011, 59, 1246–1257. [Google Scholar] [CrossRef]
- Alpern, S.; Lidbetter, T.; Morton, A.; Papadaki, K. Patrolling a Pipeline; Springer International Publishing: Cham, Switzerland, 2016; pp. 129–138. [Google Scholar]
- Papadaki, K.; Alpern, S.; Lidbetter, T.; Morton, A. Patrolling a border. Oper. Res. 2016, 64, 1256–1269. [Google Scholar] [CrossRef]
- Srivastava, A.; Gupta, J.P. New methodologies for security risk assessment of oil and gas industry. Process. Saf. Environ. 2010, 88, 407–412. [Google Scholar] [CrossRef]
- Rezazadeh, A.; Zhang, L.; Reniers, G.; Khakzad, N.; Cozzani, V. Optimal patrol scheduling of hazardous pipelines using game theory. Process. Saf. Environ. 2017, 109, 242–256. [Google Scholar] [CrossRef]
- Johnson, M.P.; Fang, F.; Tambe, M. Patrol strategies to maximize pristine forest area. In Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence, Toronto, ON, Canada, 22–26 July 2012; AAAI Press: Menlo Park, CA, USA, 2012; pp. 295–301. [Google Scholar]
- Yang, R.; Tambe, M.; Jain, M.; Kwak, J.-Y.; Pita, J.; Yin, Z. Game theory and human behavior: Challenges in security and sustainability. In Proceedings of the 2nd International Conference on Algorithmic Decision Theory, Piscataway, NJ, USA, 26–28 October 2011; Springer: Berlin, Germany, 2011; pp. 320–330. [Google Scholar]
- Fang, F.; Nguyen, T.H. Green security games: Apply game theory to addressing green security challenges. ACM SIGecom Exch. 2016, 15, 78–83. [Google Scholar] [CrossRef]
- Fang, F.; Nguyen, T.H.; Pickles, R.; Lam, W.Y.; Clements, G.R.; An, B.; Singh, A.; Schwedock, B.C.; Tambe, M.; Lemieux, A. Paws—A deployed game-theoretic application to combat poaching. AI Mag. 2017, 38, 23–36. [Google Scholar] [CrossRef]
- Fang, F.; Stone, P.; Tambe, M. When security games go green: Designing defender strategies to prevent poaching and illegal fishing. In Proceedings of the 24th International Conference on Artificial Intelligence, Buenos Aires, Aigentina, 25–31 July 2015; AAAI Press: Menlo Park, CA, USA, 2015; pp. 2589–2595. [Google Scholar]
- Haskell, W.B.; Kar, D.; Fang, F.; Tamb, M.; Cheung, S.; Denicola, L.E. Robust protection of fisheries with compass. In Proceedings of the Twenty-Eighth AAAI Conference on Artificial Intelligence, Quebec City, QC, Canada, 27–31 July 2014; AAAI Press: Menlo Park, CA, USA, 2014; pp. 2978–2983. [Google Scholar]
- Zhu, Z.; Chen, B.; Reniers, G.; Zhang, L.; Qiu, S.; Qiu, X. Playing chemical plant environmental protection games with historical monitoring data. Int. J. Environ. Res. Public Health 2017, 14, 1155. [Google Scholar] [CrossRef]
- Zhu, Z.; Chen, B.; Qiu, S.; Wang, R.; Chen, F.; Wang, Y.; Qiu, X. An extended chemical plant environmental protection game on addressing uncertainties of human adversaries. Int. J. Environ. Res. Public Health 2018, 15. [Google Scholar] [CrossRef]
- Ma, D.; Wang, S.; Zhang, Z. Hybrid algorithm of minimum relative entropy-particle swarm optimization with adjustment parameters for gas source term identification in atmosphere. Atmos. Environ. 2014, 94, 637–646. [Google Scholar] [CrossRef]
- Wang, R.; Chen, B.; Qiu, S.; Ma, L.; Zhu, Z.; Wang, Y.; Qiu, X. Hazardous source estimation using an artificial neural network, particle swarm optimization and a simulated annealing algorithm. Atmosphere 2018, 9, 119. [Google Scholar] [CrossRef]
- Qiu, S.; Chen, B.; Zhu, Z.; Wang, Y.; Qiu, X. Source term estimation using air concentration measurements during nuclear accident. J. Radioanal. Nucl. Chem. 2016, 311, 165–178. [Google Scholar] [CrossRef]
- Ma, D.; Deng, J.; Zhang, Z. Comparison and improvements of optimization methods for gas emission source identification. Atmos. Environ. 2013, 81, 188–198. [Google Scholar] [CrossRef]
- Conitzer, V.; Sandholm, T. Computing the optimal strategy to commit to. In Proceedings of the 7th ACM conference on Electronic commerce, Ann Arbor, MI, USA, 11–15 June 2006; ACM: Ann Arbor, MI, USA, 2006; pp. 82–90. [Google Scholar] [Green Version]





| Nodes | A1 | A2 | B | C | Cr1 | Cr2 | Cr3 | D1 | D2 | E | F |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A1 | 10 | 10 | 4 | ∞ | ∞ | ∞ | ∞ | ∞ | ∞ | ∞ | ∞ |
| A2 | 10 | 10 | ∞ | ∞ | ∞ | ∞ | 2 | ∞ | ∞ | ∞ | ∞ |
| B | 4 | ∞ | 6 | ∞ | 2 | ∞ | ∞ | ∞ | ∞ | ∞ | ∞ |
| C | ∞ | ∞ | ∞ | 5 | ∞ | 2 | 2 | ∞ | ∞ | ∞ | ∞ |
| Cr1 | ∞ | ∞ | 2 | ∞ | ∞ | ∞ | ∞ | 3 | 1 | ∞ | ∞ |
| Cr2 | ∞ | ∞ | ∞ | 2 | ∞ | ∞ | ∞ | ∞ | 1 | 2 | ∞ |
| Cr3 | ∞ | 2 | ∞ | 2 | ∞ | ∞ | ∞ | ∞ | ∞ | ∞ | 3 |
| D1 | ∞ | ∞ | ∞ | ∞ | 3 | ∞ | ∞ | 7 | 7 | ∞ | ∞ |
| D2 | ∞ | ∞ | ∞ | ∞ | 1 | 1 | ∞ | 7 | 7 | ∞ | ∞ |
| E | ∞ | ∞ | ∞ | ∞ | ∞ | 2 | ∞ | ∞ | ∞ | 6 | ∞ |
| F | ∞ | ∞ | ∞ | ∞ | ∞ | ∞ | 3 | ∞ | ∞ | ∞ | 7 |
| Algorithm: Generating the Transition Graph |
|---|
| Construct an empty temporary node list tNL, an empty node list tV, and an empty edge set tE; Construct node tv = (0, dsn), in which dsn is the patrolling source node in graph G; Initialize tNL ← tv, tV ← tv; While tNL is not empty, do; Get the first node in tNL, denoted as the current node cv = (ct, cn); Construct the follow-up nodes of cv; In graph G, find all the connected nodes of cn, representing as ccn = ; For each node nd that belongs to ccn, if holds, construct a new node nv = (ct + sC(cn, nd), nd) and a directed edge ne from cv to nv should also be constructed (the state transition should also be considered); Add edge ne to list tE; If nv is already in tV, continue; otherwise, insert nv into tNL, add nv to tV; Remove cv from tNL; End. |
| MultiLPs |
|---|
| 1. Initialization For each attacker strategy , calculate and , where are linear polynomials of ; 2. Linear Programming (LP) Suppose that the attacker strategy is the attacker’s best response, which means: The defender would then aim at: 3. Summary The Stackelberg equilibrium achieves: |
| Parameter | ||||||
|---|---|---|---|---|---|---|
| Nodes | ||||||
| ‘A’ | 6 | 96 | 60 | 18 | 0.45 | |
| ‘B’ | 6 | 67.2 | 36 | 18 | 0.3 | |
| ‘C’ | 6 | 84 | 49.8 | 18 | 0.42 | |
| ‘D’ | 6 | 72 | 42.6 | 18 | 0.45 | |
| ‘E’ | 6 | 90 | 60 | 18 | 0.5 | |
| ‘F’ | 6 | 78 | 54 | 18 | 0.4 | |
| Strategy | Stackelberg Equilibrium | Purely Randomized Route Strategy | Fixed Route Strategy | |
|---|---|---|---|---|
| Payoff | ||||
| Defender’s payoff | −6.616 | −8.254 | −8.35 | |
| Attacker’s payoff | 3.188 | 4.054 | 4.15 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Zhu, Z.; Chen, F.; Zhao, Y.; Qiu, X. Strategically Patrolling in a Chemical Cluster Addressing Gas Pollutants’ Releases through a Game-Theoretic Model. Int. J. Environ. Res. Public Health 2019, 16, 612. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph16040612
Chen B, Zhu Z, Chen F, Zhao Y, Qiu X. Strategically Patrolling in a Chemical Cluster Addressing Gas Pollutants’ Releases through a Game-Theoretic Model. International Journal of Environmental Research and Public Health. 2019; 16(4):612. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph16040612
Chicago/Turabian StyleChen, Bin, Zhengqiu Zhu, Feiran Chen, Yong Zhao, and Xiaogang Qiu. 2019. "Strategically Patrolling in a Chemical Cluster Addressing Gas Pollutants’ Releases through a Game-Theoretic Model" International Journal of Environmental Research and Public Health 16, no. 4: 612. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph16040612