Internet of Things (IoT)-Enabled Elderly Fall Verification, Exploiting Temporal Inference Models in Smart Homes

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials
2.1. Classification Model I (CM-I)
2.2. Classification Model II (CM-II)
2.3. Evaluation Metrics
3. Methods
4. Results
5. Discussion
Random forest (RF). This is an “ensemble method made of decision trees, in which an input is processed through the forest of decision trees and computes the output class as the mode of the response class given by the trees.” This technique is employed in many fall detection and activity recognition systems.(source: [12], page 16)
6. Conclusions and Future Research Orientations
In data collection, all activities were performed in the same order and trials were performed consecutively. Falls were self-initiated, and subjects fell onto a protective mattress that damped the impact of the simulation. This is a difference between real falls which generally occur towards hard materials and no intuitive reaction trying not to fall was recorded.[12]
It is essential to notice that this dataset was thought for simple and non-overlapping activities, so down-sampling rates in IMUs (18 Hz) do not affect stationary fall predictions. This might be a limitation if the dataset would be used for real-life predictions during dynamic situations (e.g., concurrent falls-and-activities).[12]
Author Contributions
Funding
Conflicts of Interest
References
- Balakrishna, C. Enabling Technologies for Smart City Services and Applications. In Proceedings of the International Conference on Next Generation Mobile Applications, Services and Technologies, Paris, France, 12–14 September 2012; pp. 223–227. [Google Scholar]
- Centre of Regional Science. Smart Cities. Ranking of European Medium-Sized Cities. Available online: http://www.smart-cities.eu (accessed on 21 November 2019). Vienna University of Technology.
- Guillemin, P.; Friess, P. Internet of Things Strategic Research Roadmap. The Cluster of European Research. Available online: http://www.internet-of-things-research.eu (accessed on 21 November 2019).
- Durga, S.; Nag, R.; Daniel, E. Survey on machine learning and deep learning algorithms used in internet of things (IoT) healthcare. In Proceedings of the 3rd International Conference on Computing Methodologies and Communication—ICCMC, Erode, India, 27–29 March 2019; pp. 1018–1022. [Google Scholar] [CrossRef]
- Rajagopalan, R.; Litvan, I.; Jung, T.P. Fall Prediction and Prevention Systems: Recent Trends, Challenges, and Future Research Directions. Sensors 2017, 17, 2509. [Google Scholar] [CrossRef] [Green Version]
- Tao, S.; Kudo, M.; Nokaka, H. Privacy-Preserved Behavior Analysis and Fall Detection by an Infrared Ceiling Sensor Network. Sensors 2012, 12, 16920–16936. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Mel, Z.; Liang, D.; Ivanov, K.; Guo, Y.; Wang, Y.; Wang, L. Exploration and Implementation of Pre-Impact Fall Recognition Method Based on an Inertial Body Sensor Network. Sensors 2012, 12, 15338–15355. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Z.; Zhang, L.; Yang, Y.; Kang, Q.; Sun, D. Object Tracking for a Smart City Using IoT and Edge Computing. Sensors 2019, 19, 1987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmad, S.; Malik, S.; Ullah, I.; Park, D.-H.; Kim, K.; Kim, D.-H. Towards the Design of a Formal Verification and Evaluation Tool of Real-Time Tasks Scheduling of IoT Applications. Sustainability 2019, 11, 204. [Google Scholar] [CrossRef] [Green Version]
- Ghosal, P.; Das, D.; Das, I. Extensive survey on cloud-based IoT-healthcare and security using machine learning. In Proceedings of the 2018 4th IEEE International Conference on Research in Computational Intelligence and Communication Networks—ICRCICN, Kolkata, India, 22–23 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Thamilarasu, G.; Chawla, S. Towards Deep-Learning-Driven Intrusion Detection for the Internet of Things. Sensors 2019, 19, 1977. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martinez-Villasenor, L.; Ponce, H.; Brieva, J.; Moya-Albor, E.; Nunez-Martinez, J.; Peñafort-Asturiano, C. UP-Fall Detection Dataset: A Multimodal Approach. Sensors 2019, 19, 1988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rakhman, A.Z.; Nugroho, L.; Widyaman, E.; Kurnianingsih, K. Fall detection system using accelerometer and gyroscope based on smartphone. In Proceedings of the International Conference on Information Technology. Computer and Electrical Engineering, Semarang, Indonesia, 8 November 2014; pp. 99–104. [Google Scholar]
- Tamura, T.; Yoshimura, T.; Sekine, M.; Uchida, M.; Tanaka, O. A Wearable Airbag to Prevent Fall Injuries. IEEE Trans. Inf. Technol. Biomed. 2009, 3, 910–914. [Google Scholar] [CrossRef] [PubMed]
- Narasimhan, R. Skin-Contact Sensor for Automatic Fall Detection. In Proceedings of the International Conference on Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 4038–4041. [Google Scholar]
- Anderson, D.; Keller, J.M.; Skubic, M.; Chen, X.; He, Z. Recognizing Falls from Silhouettes. In Proceedings of the International Conference on Engineering in Medicine and Biology Society, New York City, NY, USA, 30 August–3 September 2006; pp. 6388–6391. [Google Scholar]
- Stone, E.E.; Skubic, M. Fall Detection in Homes of Older Adults Using the Microsoft Kinect. J. Biomed. Health Inform. 2015, 19, 290–301. [Google Scholar] [CrossRef]
- Agrawal, S.C.; Tripathi, R.K.; Jalal, A.S. Human-fall Detection from an Indoor Video Surveillance. In Proceedings of the International Conference on Computing, Communication and Networking Technologies, Delhi, India, 3–5 July 2017; pp. 1–5. [Google Scholar]
- Rimminen, H.; Lindstrom, J.; Linnavuo, M.; Sepponen, R. Detection of Falls Among the Elderly by a Floor Sensor Using the Electric Near Field. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1475–1476. [Google Scholar] [CrossRef]
- Su, B.Y.; Ho, K.C.; Rantz, M.J.; Skubic, M. Doppler Radar Fall Activity Detection Using the Wavelet Transform. IEEE Trans. Biomed. Eng. 2015, 62, 865–875. [Google Scholar] [CrossRef] [PubMed]
- Bourke, A.K.; Klenk, J.; Schwickert, L.; Aminian, K.; Ihlen, E.A.; Mellone, S.; Helbostad, J.L.; Chiari, L.; Becker, C. Fall detection algorithms for real-world falls harvested from lumbar sensors in the elderly population: A machine learning approach. In Proceedings of the International Conference on Engineering in Medicine & Biology Society, Orlando, FL, USA, 16–20 August 2016; pp. 3712–3715. [Google Scholar]
- Dinh, A.; Teng, D.; Chen, L.; Shi, Y.; McCrosky, C.; Basran, J.; Haas, V.D.B.; Ko, S.B.; Ralhan, A.; Williams, D.; et al. A Fall Detection and Near-Fall Data Collection System. In Proceedings of the International Conference on Microsystems and Nanoelectronics, Ottawa, ON, Canada, 15 October 2008; pp. 117–120. [Google Scholar]
- Nguyen, T.T.; Cho, M.C.; Lee, T.S. Automatic fall detection using Wearable Biomedical Signal Measurement Terminal. In Proceedings of the International Conference on Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 5203–5206. [Google Scholar]
- Harris, A.; True, H.; Hu, Z.; Cho, J.; Fell, N.; Sartipi, M. Fall recognition using wearable technologies and machine learning algorithms. In Proceedings of the International Conference on Big Data, Washington, DC, USA, 5–8 December 2016; pp. 3974–3976. [Google Scholar]
- Otanasap, N. Pre-Impact Fall Detection Based on Wearable Device Using Dynamic Threshold Model. In Proceedings of the International Conference on Parallel and Distributed Computing, Applications and Technologies, Guangzhou, China, 16–18 December 2016; pp. 362–365. [Google Scholar]
- Rathi, N.; Kakani, M.; Sharkawy, M.E.; Rizkalla, M. Wearable low power pre-fall detection system with IoT and Bluetooth capabilities. In Proceedings of the National Conference on Aerospace and Electronics, Dayton, OH, USA, 27–30 June 2017; pp. 241–244. [Google Scholar]
- Hsieh, C.Y.; Shi, W.T.; Huang, H.Y.; Liu, K.C.; Hsu, S.J.; Chan, C.T. Machine learning-based fall characteristics monitoring system for strategic plan of falls prevention. In Proceedings of the International Conference on Applied System Invention, Chiba, Japan, 13–17 April 2018; pp. 818–821. [Google Scholar]
- Bianchi, F.; Redmond, S.J.; Narayanan, M.R.; Cerutti, S.; Lovell, N.H. Barometric Pressure and Triaxial Accelerometry-Based Falls Event Detection. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 617–627. [Google Scholar]
- Lan, C.C.; Hsueh, Y.H.; Hu, R.Y. Real-Time Fall Detection System Using a Tri-axial Accelerometer for Home Care. In Proceedings of the International Conference on Biomedical Engineering and Biotechnology, Macao, China, 28–30 May 2012; pp. 1077–1080. [Google Scholar]
- Narayanan, M.R.; Redmond, S.J.; Scalzi, M.E.; Lord, S.R.; Celler, B.G.; Lovell, N.H. Longitudinal Falls-Risk Estimation Using Triaxial Accelerometry. IEEE Trans. Biomed. Eng. 2010, 57, 534–541. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Redmond, S.J.; Wang, N.; Blumenkron, F.; Narayanan, M.R.; Lovell, N.H. Spectral Analysis of Accelerometry Signals from a Directed-Routine for Falls-Risk Estimation. IEEE Trans. Biomed. Eng. 2011, 58, 2308–2315. [Google Scholar]
- Liu, J.; Lockhart, T.E. Development and Evaluation of a Prior-to-Impact Fall Event Detection Algorithm. IEEE Trans. Biomed. Eng. 2014, 61, 2135–2140. [Google Scholar] [PubMed] [Green Version]
- Tan, T.D.; Tinh, N.V. Reliable fall detection system using a 3-DOF accelerometer and cascade posture recognitions. In Proceedings of the 2014 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Siem Reap, Cambodia, 9–12 December 2014; pp. 1–6. [Google Scholar]
- Wang, C.; Redmond, S.J.; Lu, W.; Stevens, M.C.; Lord, S.R.; Lovell, N.H. Selecting Power-Efficient Signal Features for a Low-Power Fall Detector. IEEE Trans. Biomed. Eng. 2017, 64, 2729–2736. [Google Scholar]
- Hayat, A.; Shan, M. Fall Detection System for Labour Safety. In Proceedings of the International Conference on Engineering, Applied Sciences, and Technology, Phuket, Thailand, 4–7 July 2018; pp. 1–4. [Google Scholar]
- Wang, H.; Zhang, D.; Wang, Y.; Ma, J.; Li, S. RT-Fall: A Real-Time and Contactless Fall Detection System with Commodity WiFi Devices. IEEE Trans. Mob. Comput. 2017, 16, 511–526. [Google Scholar] [CrossRef]
- Anagnostopoulos, T.; Ntalianis, K.; Skourlas, C.; Jino Ramson, S.R. IoT-enabled fall verification of elderly and impaired people in Smart Cities. In Proceedings of the Pan-Hellenic Conference on Informatics, Athens, Greece, 29 November–1 December 2018; pp. 88–92. [Google Scholar]
- Nakashima, Y.; Ueki, S.; Kobayashi, T.; Notsuka, H.; Fukui, T.; Yamamoto, M. Fall Prevention Analysis During a Fall Stimulus Using the Differential Velocity of a Split Belt Treadmill. In Proceedings of the World Automation Congress, Stevenson, WA, USA, 3–6 June 2018; pp. 176–181. [Google Scholar]
- Koshmak, G.A.; Linden, M.; Loutfi, A. Fall risk probability estimation based on supervised feature learning using public fall datasets. In Proceedings of the International Conference on Engineering in Medicine and Biology Society, Orlando, FL, USA, 16–20 August 2016; pp. 752–755. [Google Scholar]
- Chaccour, K.; Darazi, R.; Hassani, A.H.E.; Andres, E. From Fall Detection to Fall Prevention: A Generic Classification of Fall-Related Systems. IEEE Sens. J. 2017, 17, 812–822. [Google Scholar] [CrossRef]
- Greene, B.R.; Redmond, S.J.; Caulfield, B. Fall Risk Assessment Through Automatic Combination of Clinical Fall Risk Factors and Body-Worn Sensor Data. J. Biomed. Health Inform. 2017, 21, 725–731. [Google Scholar] [CrossRef]
- Wang, K.; Delbaere, K.; Brodie, M.A.D.; Lovell, N.H.; Kark, L.; Lord, S.E.; Redmond, S.J. Differences Between Gait on Stairs and Flat Surfaces in Relation to Fall Risk and Future Falls. J. Biomed. Health Inform. 2017, 21, 1479–1486. [Google Scholar] [CrossRef]
- Chang, C.J.; Chang, Y.S.; Yang, S.W. Using Single Leg Standing Time to Predict the Fall Risk in Elderly. In Proceedings of the International Conference on Engineering in Medicine and Biology Society, Osaka, Japan, 3–7 July 2013; pp. 7456–7458. [Google Scholar]
- Guimaraes, V.; Ribeiro, D.; Rosado, L. A smartphone-based fall risk assessment tool: Measuring One Leg Standing, Sit to Stand and Falls Efficacy Scale. In Proceedings of the International Conference on e-Health Networking, Application and Services, Lisbon, Portugal, 9–12 October 2013; pp. 529–533. [Google Scholar]
- Hsieh, S.L.; Su, M.H.; Liu, L.F.; Jiang, W.W. A Finite State Machine-Based Fall Detection Mechanism on Smartphones. In Proceedings of the International Conference on Ubiquitous Intelligence and Computing, International Conference on Autonomic and Trusted Computing, Fukuoka, Japan, 4–7 September 2012; pp. 735–739. [Google Scholar]
- Kau, L.J.; Chen, C.S. A Smart Phone-Based Pocket Fall Accident Detection, Positioning, a Rescue System. J. Biomed. Health Inform. 2015, 19, 44–56. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.K.; Robinovitch, S.N.; Park, E.J. Inertial Sensing-Based Pre-Impact Detection of Falls Involving Near-Fall Scenarios. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 258–266. [Google Scholar] [CrossRef] [PubMed]
- Ghasemi, F.; Rezaee, A.; Rahmani, A.M. Structural and behavioral reference model for IoT-based elderly health-care systems in smart home. Int. J. Commun. Syst. 2019, 32, 4002. [Google Scholar] [CrossRef]
- Brownlee, J. Machine Learning Mastery. 2014. Available online: https://machinelearningmastery.com/mcnemars-test-for-machine-learning/ (accessed on 27 December 2019).
- Balakrishna, S.; Thirumaran, M.; Solanki, V.K. IoT sensor data integration in healthcare using semantics and machine learning approaches. Intell. Syst. Ref. Libr. 2020, 165, 275–300. [Google Scholar] [CrossRef]
- Takahashi, Y.; Nishida, Y.; Kitamura, K.; Mizoguchi, H. Handrail IoT sensor for precision healthcare of elderly people in smart homes. In Proceedings of the IEEE 5th International Symposium on Robotics and Intelligent Sensors, Ottawa, ON, Canada, 5–7 October 2017; pp. 364–368. [Google Scholar] [CrossRef]
- Klaib, A.F.; Alsrehin, N.O.; Melhem, W.Y.; Bashtawi, H.O. IoT smart home using eye tracking and voice interfaces for elderly and special needs people. J. Commun. 2019, 14, 614–621. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| # | CM-I Model |
|---|---|
| 1 | Input:, |
| 2 | Output: Class |
| 3 | //Incident with certain time |
| 4 | |
| 5 | While (True) Do |
| 6 | If () Then |
| 7 | Class fall |
| 8 | Else |
| 9 | Class bend |
| 10 | End If |
| 11 | End While |
| # | CM-II Model |
|---|---|
| 1 | Input:, |
| 2 | Output: Class |
| 3 | //Incident vector with certain time measurements |
| 4 | |
| 5 | |
| 6 | |
| 7 | For () Do//Repeat until i.e., floor is reached |
| 8 | |
| 9 | |
| 10 | IfThen |
| 11 | |
| 12 | Else |
| 13 | |
| 14 | End If |
| 15 | End For |
| 16 | If () Then |
| 17 | Class fall |
| 18 | Else |
| 19 | Class bend |
| 20 | End If |
| Parameters | Values |
|---|---|
| Number of incident videos | 86 |
| Number of fall videos | 41 |
| Number of lean over videos | 45 |
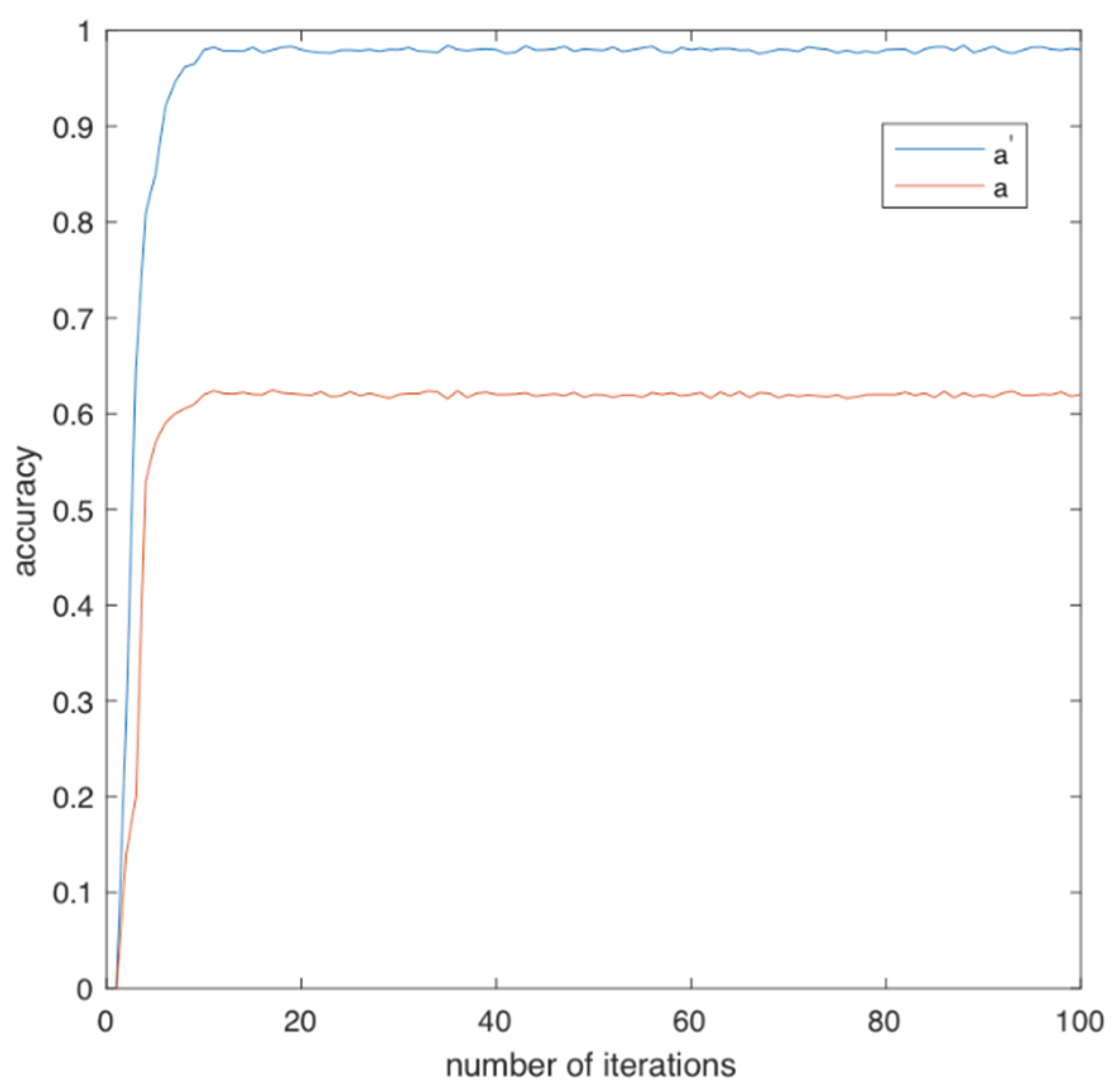
| Evaluation method | 10-fold cross validation |
| Video standard | NTSC |
| Frames per second (fps) | 30 |
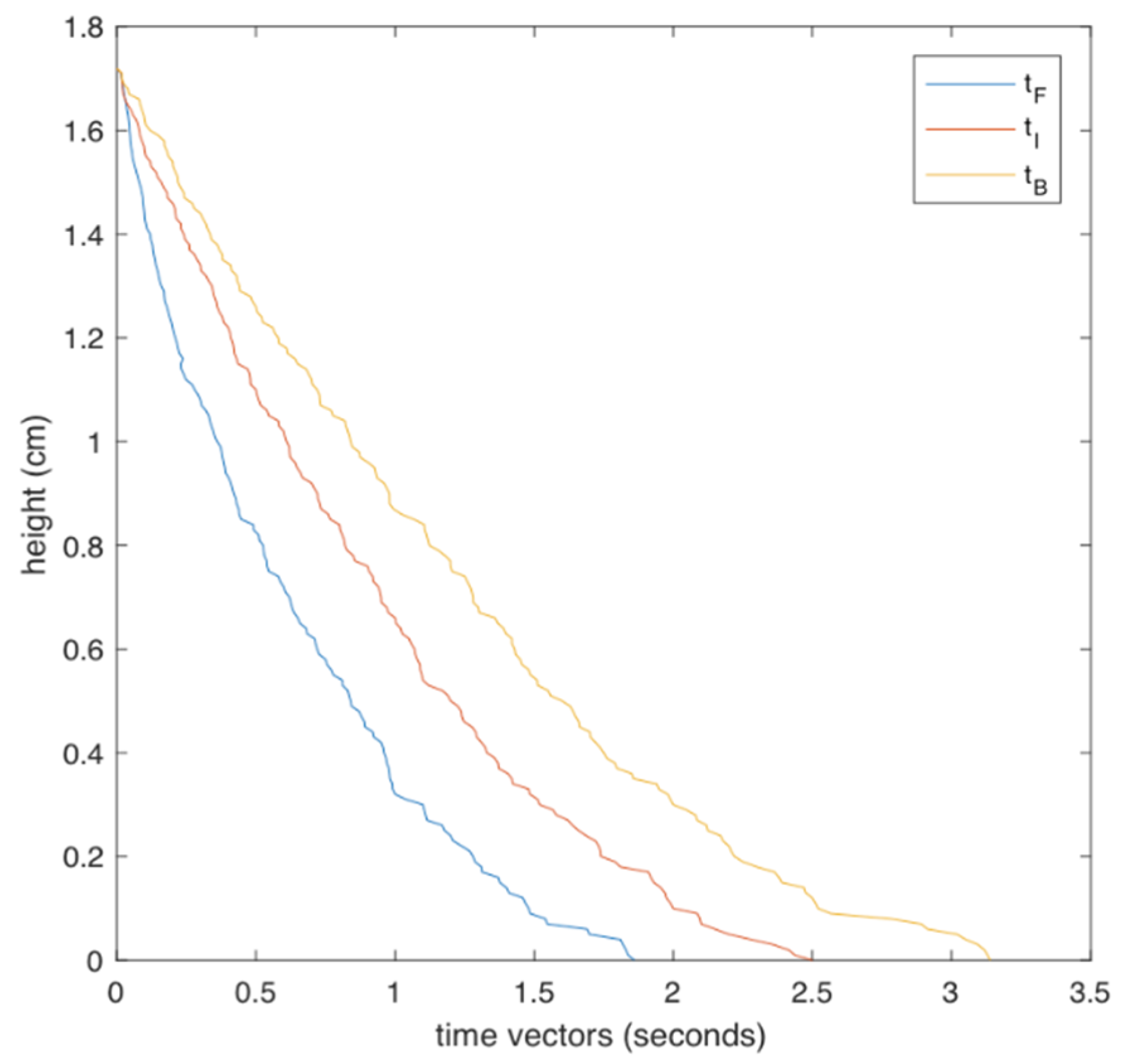
| Height interval (cm) | |
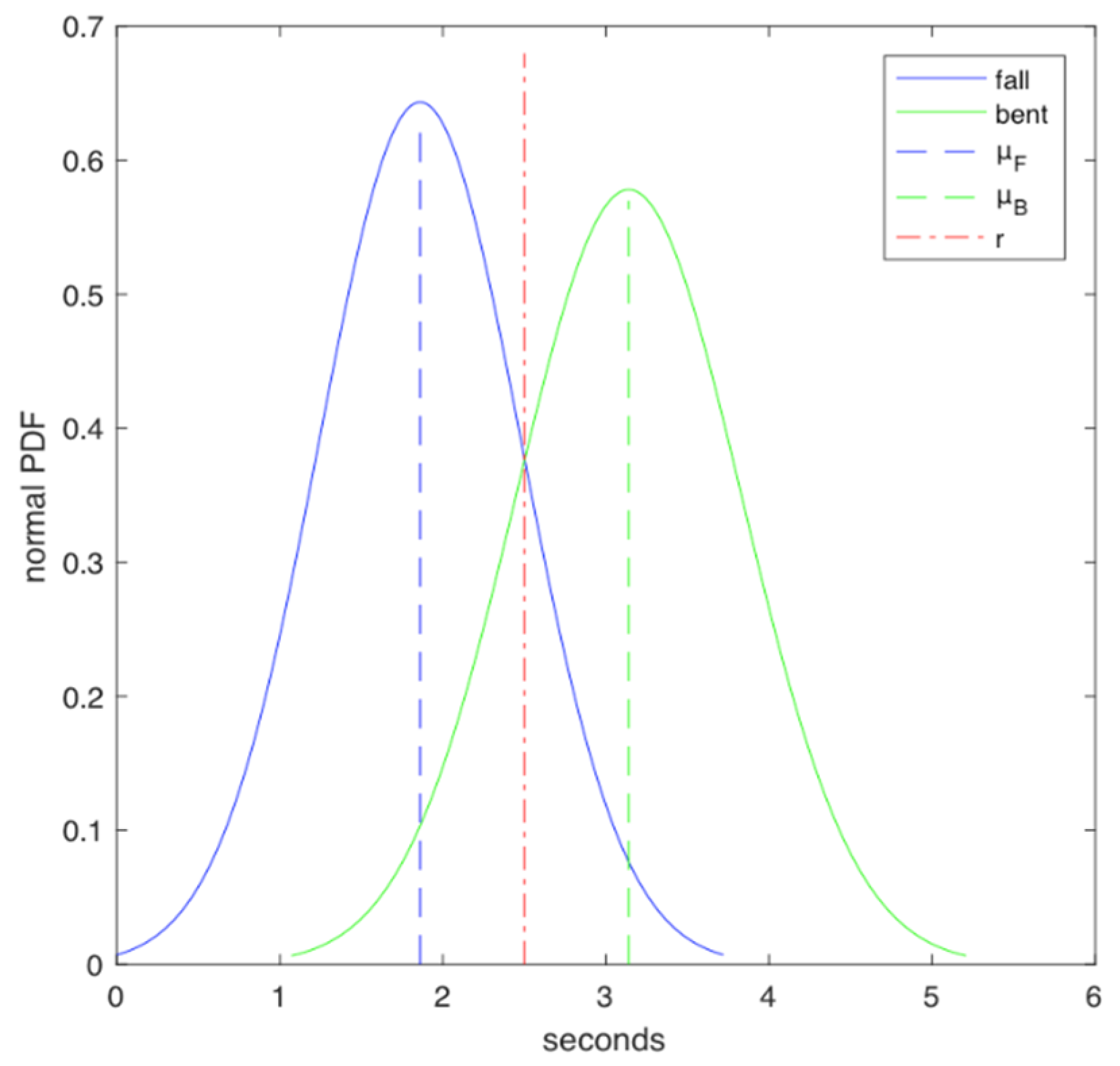
| Normal PDF of (seconds) | |
| Normal PDF of (seconds) | |
| Criterion (seconds) | 1.7 |
| Metric interval (net number) | |
| Metric interval (net number) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyriakopoulos, G.; Ntanos, S.; Anagnostopoulos, T.; Tsotsolas, N.; Salmon, I.; Ntalianis, K. Internet of Things (IoT)-Enabled Elderly Fall Verification, Exploiting Temporal Inference Models in Smart Homes. Int. J. Environ. Res. Public Health 2020, 17, 408. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph17020408
Kyriakopoulos G, Ntanos S, Anagnostopoulos T, Tsotsolas N, Salmon I, Ntalianis K. Internet of Things (IoT)-Enabled Elderly Fall Verification, Exploiting Temporal Inference Models in Smart Homes. International Journal of Environmental Research and Public Health. 2020; 17(2):408. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph17020408
Chicago/Turabian StyleKyriakopoulos, Grigorios, Stamatios Ntanos, Theodoros Anagnostopoulos, Nikolaos Tsotsolas, Ioannis Salmon, and Klimis Ntalianis. 2020. "Internet of Things (IoT)-Enabled Elderly Fall Verification, Exploiting Temporal Inference Models in Smart Homes" International Journal of Environmental Research and Public Health 17, no. 2: 408. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph17020408