
Application of Real-Time Visual Feedback System in Balance Training of the Center of Pressure with Smart Wearable Devices



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Equipment
2.2.1. Evaluation Equipment
2.2.2. Training Equipment
2.3. Experimental Protocol
2.3.1. Evaluation Protocol
2.3.2. Training Protocol
2.4. Sample Size Estimation
2.5. Statistical Analysis
3. Results
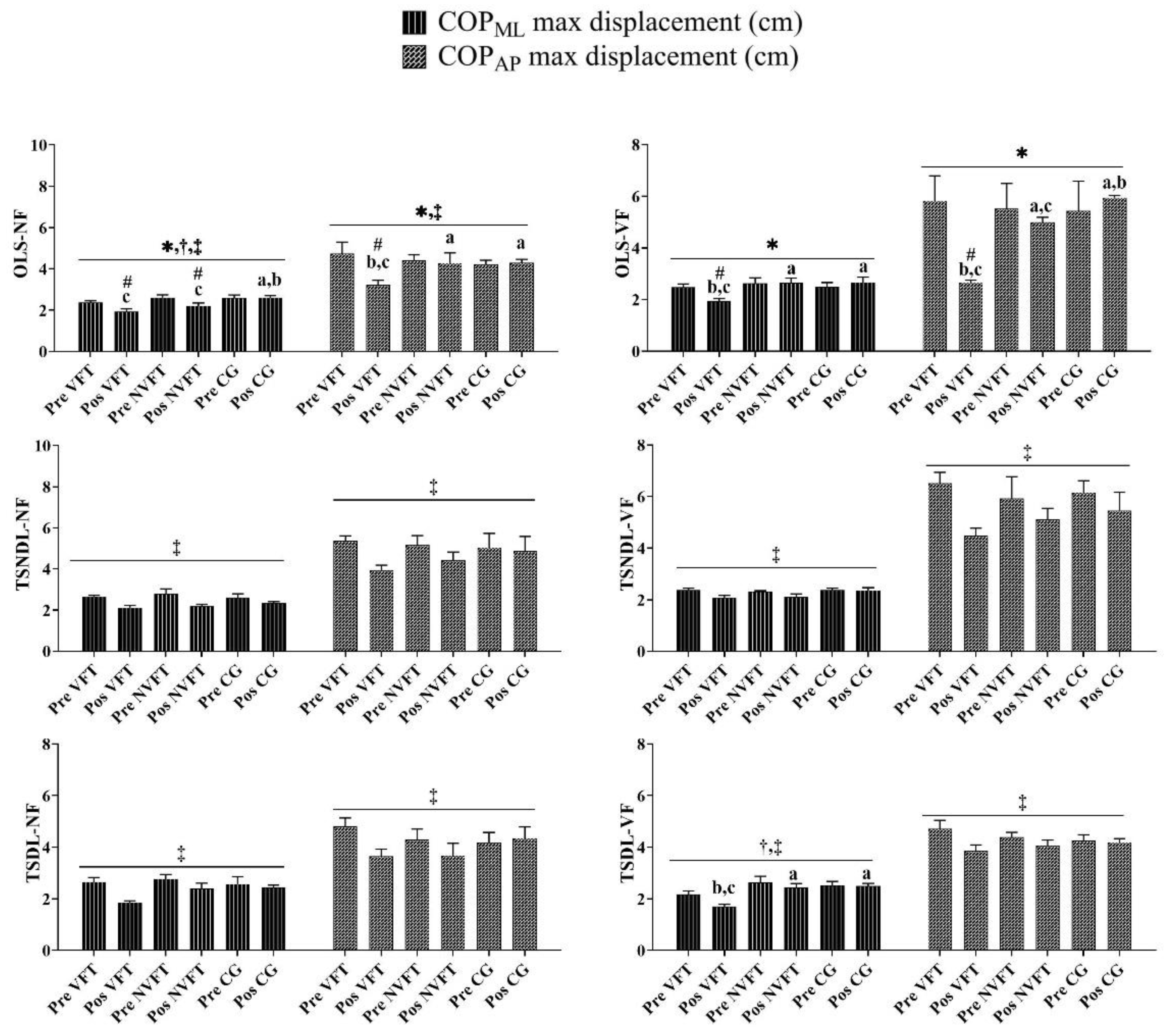
3.1. Analysis of COPML/AP Max Displacement
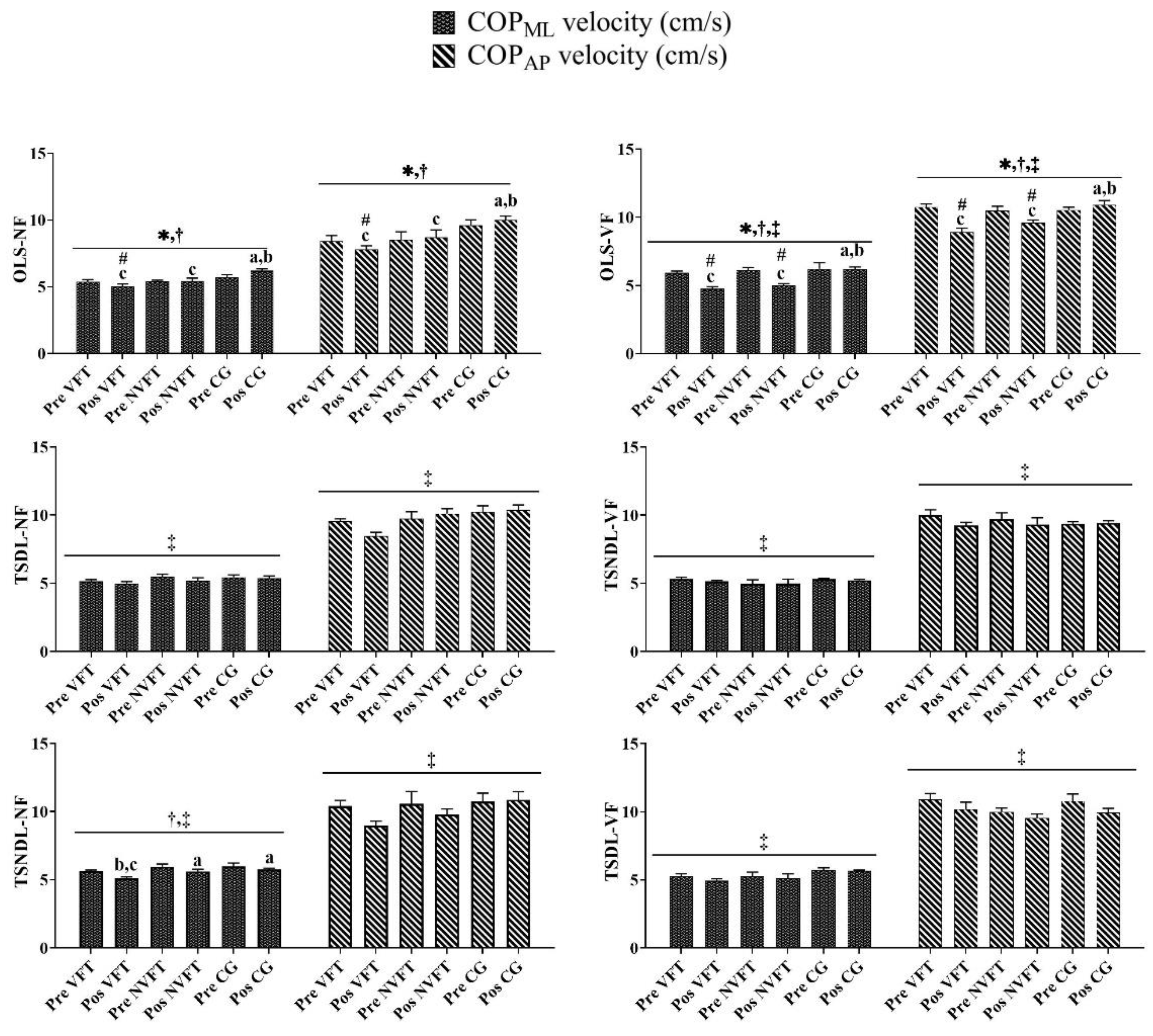
3.2. Analysis of COPML/AP Velocity
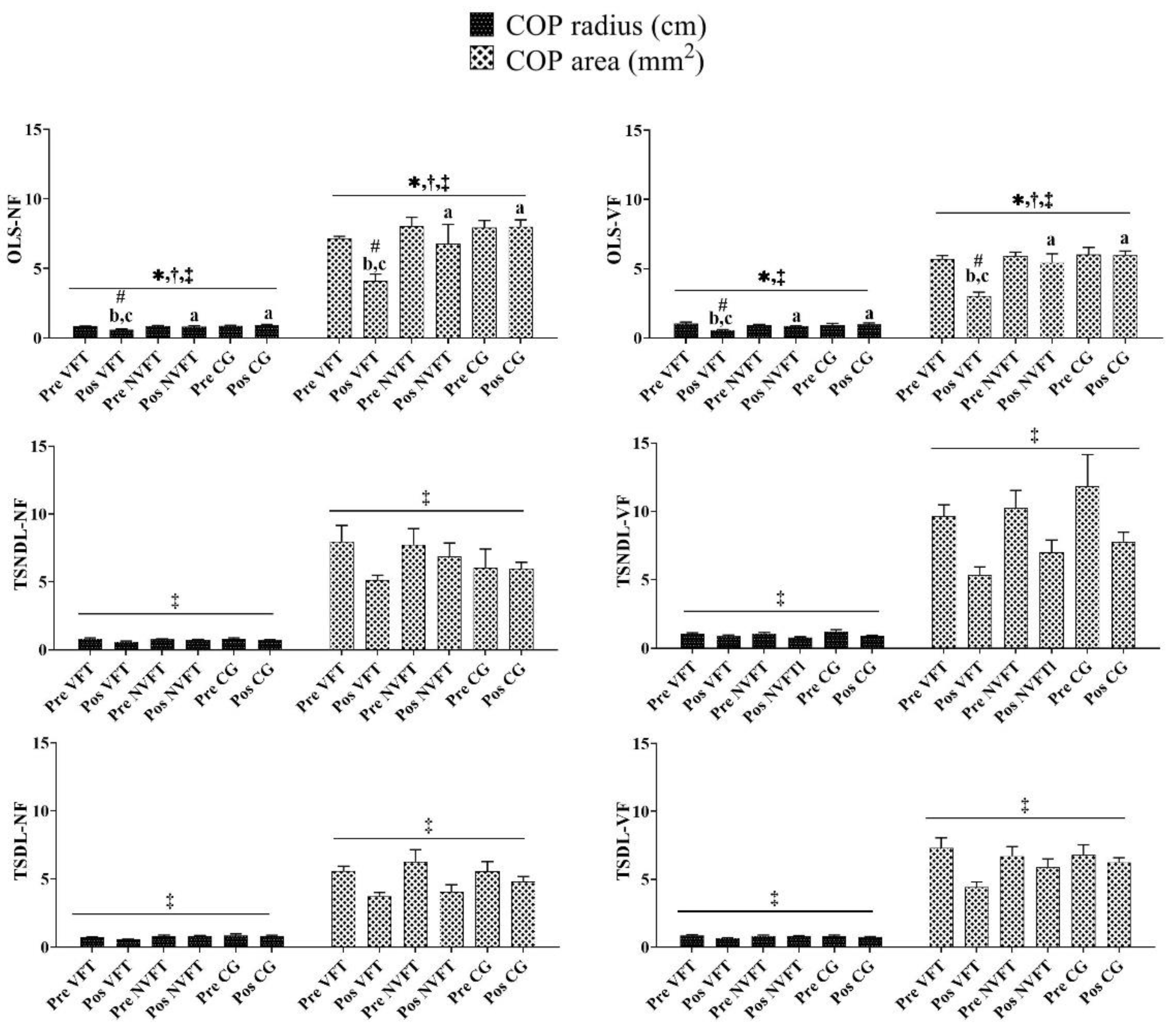
3.3. Analysis of COP Radius and COP Area
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
References
- Wang, J.; Xu, J.; An, R. Effectiveness of backward walking training on balance performance: A systematic review and meta-analysis. Gait Posture 2019, 68, 466–475. [Google Scholar] [CrossRef]
- Horak, F.; Kuo, A. Postural adaptation for altered environments, tasks, and intentions. In Biomechanics and Neural Control of Posture and Movement; Springer: New York, NY, USA, 2000; pp. 267–281. [Google Scholar]
- De Brito Silva, P.; Oliveira, A.S.; Mrachacz-Kersting, N.; Laessoe, U.; Kersting, U.G. Strategies for equilibrium maintenance during single leg standing on a wobble board. Gait Posture 2016, 44, 149–154. [Google Scholar] [CrossRef] [PubMed]
- Shubert, T.E. Evidence-based exercise prescription for balance and falls prevention: A current review of the literature. J. Geriatr. Phys. Ther. 2011, 34, 100–108. [Google Scholar] [CrossRef]
- Wulf, G. Attentional focus and motor learning: A review of 15 years. J. Sport Exerc. Psychol. 2013, 6, 77–104. [Google Scholar] [CrossRef]
- Alfieri, F.M.; Riberto, M.; Gatz, L.S.; Ribeiro, C.P.C.; Lopes, J.A.F.; Battistella, L.R. Comparison of multisensory and strength training for postural control in the elderly. Clin. Interv. Aging 2012, 7, 119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Freitas, S.M.S.F.; Duarte, M. Joint coordination in young and older adults during quiet stance: Effect of visual feedback of the center of pressure. Gait Posture 2012, 35, 83–87. [Google Scholar] [CrossRef] [PubMed]
- Sungkarat, S.; Fisher, B.E.; Kovindha, A. Efficacy of an insole shoe wedge and augmented pressure sensor for gait training in individuals with stroke: A randomized controlled trial. Clin. Rehabil. 2011, 25, 360–369. [Google Scholar] [CrossRef]
- Sayenko, D.G.; Alekhina, M.I.; Masani, K.; Vette, A.; Obata, H.; Popovic, M.; Nakazawa, K. Positive effect of balance training with visual feedback on standing balance abilities in people with incomplete spinal cord injury. Spinal Cord 2010, 48, 886–893. [Google Scholar] [CrossRef] [Green Version]
- Schwenk, M.; Grewal, G.S.; Honarvar, B.; Schwenk, S.; Mohler, J.; Khalsa, D.S.; Najafi, B. Interactive balance training integrating sensor-based visual feedback of movement performance: A pilot study in older adults. J. Neuroeng. Rehabil. 2014, 11, 164. [Google Scholar] [CrossRef] [Green Version]
- Wang, I.-L.; Wang, L.-I.; Xue, S.-J.; Hu, R.; Jian, R.-J.; Ho, C.-S. Gender differences of the improvement in balance control based on the real-time visual feedback system with smart wearable devices. Acta Bioeng. Biomech. 2021, 23, 163–171. [Google Scholar]
- Kulkarni, P.; Thosar, J. Effect of Arch Index of Foot on Dynamic Balance in Healthy Young Adults. Indian J. Physiother. Occup. Ther. 2020, 14, 134–140. [Google Scholar]
- Alghadir, A.H.; Alotaibi, A.Z.; Iqbal, Z.A. Postural stability in people with visual impairment. Brain Behav. 2019, 9, e01436. [Google Scholar] [CrossRef] [Green Version]
- Brown, C.N.; Ko, J.; Rosen, A.B.; Hsieh, K. Individuals with both perceived ankle instability and mechanical laxity demonstrate dynamic postural stability deficits. Clin. Biomech. (Bristol Avon) 2015, 30, 1170–1174. [Google Scholar] [CrossRef]
- Vando, S.; Longo, S.; Cavaggioni, L.; Maurino, L.; Larion, A.; Invernizzi, P.; Padulo, J. The Effects of Short-Term Visual Feedback Training on the Stability of the Roundhouse Kicking Technique in Young Karatekas. Int. J. Environ. Res. Public Health 2021, 18, 1961. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wang, X.-X.; Liang, Y.-Y.; Chen, S.-Y.; Sheng, J.; Ma, S.-J. Effects of the visual-feedback-based force platform training with functional electric stimulation on the balance and prevention of falls in older adults: A randomized controlled trial. PeerJ 2018, 6, e4244. [Google Scholar] [CrossRef] [PubMed]
- Eils, E.; Behrens, S.; Mers, O.; Thorwesten, L.; Völker, K.; Rosenbaum, D.J.G. Reduced plantar sensation causes a cautious walking pattern. Gait Posture 2004, 20, 54–60. [Google Scholar] [CrossRef]
- Nam, S.-M.; Kim, K.; Lee, D.Y. Effects of visual feedback balance training on the balance and ankle instability in adult men with functional ankle instability. J. Phys. Ther. Sci. 2018, 30, 113–115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moraes, R.; Lopes, A.G.; Barela, J.A. Monocular vision and increased distance reducing the effects of visual manipulation on body sway. Neurosci. Lett. 2009, 460, 209–213. [Google Scholar] [CrossRef] [PubMed]
- Kannape, O.A.; Barré, A.; Aminian, K.; Blanke, O. Cognitive loading affects motor awareness and movement kinematics but not locomotor trajectories during goal-directed walking in a virtual reality environment. PLoS ONE 2014, 9, e85560. [Google Scholar] [CrossRef] [PubMed]
- Mochizuki, G.; Semmler, J.G.; Ivanova, T.D.; Garland, S.J. Low-frequency common modulation of soleus motor unit discharge is enhanced during postural control in humans. Exp. Brain Res. 2006, 175, 584–595. [Google Scholar] [CrossRef]
- Nam, S.M.; Kim, K.; Lee, D.Y. Effects of balance training by knee joint motions on muscle activity in adult men with functional ankle instability. J. Phys. Ther. Sci. 2016, 28, 1629–1632. [Google Scholar] [CrossRef] [PubMed]
- Rougier, P. Visual feedback induces opposite effects on elementary centre of gravity and centre of pressure minus centre of gravity motions in undisturbed upright stance. Clin. Biomech. (Bristol Avon) 2003, 18, 341–349. [Google Scholar] [CrossRef]
- Brauer, S.G.; Woollacott, M.; Shumway-Cook, A. The interacting effects of cognitive demand and recovery of postural stability in balance-impaired elderly persons. J. Gerontol. Ser. A Biol. Sci. Med Sci. 2001, 56, M489–M496. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hsu, W.-L.; Scholz, J.P.; Schoner, G.; Jeka, J.J.; Kiemel, T. Control and estimation of posture during quiet stance depends on multijoint coordination. J. Neurophysiol. 2007, 97, 3024–3035. [Google Scholar] [CrossRef] [Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, I.-L.; Wang, L.-I.; Liu, Y.; Su, Y.; Yao, S.; Ho, C.-S. Application of Real-Time Visual Feedback System in Balance Training of the Center of Pressure with Smart Wearable Devices. Int. J. Environ. Res. Public Health 2021, 18, 9637. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18189637
Wang I-L, Wang L-I, Liu Y, Su Y, Yao S, Ho C-S. Application of Real-Time Visual Feedback System in Balance Training of the Center of Pressure with Smart Wearable Devices. International Journal of Environmental Research and Public Health. 2021; 18(18):9637. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18189637
Chicago/Turabian StyleWang, I-Lin, Li-I Wang, Yang Liu, Yu Su, Shun Yao, and Chun-Sheng Ho. 2021. "Application of Real-Time Visual Feedback System in Balance Training of the Center of Pressure with Smart Wearable Devices" International Journal of Environmental Research and Public Health 18, no. 18: 9637. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18189637