Central Attention and a Dual Path Convolutional Neural Network in Real-World Tree Species Recognition




Abstract
:1. Introduction
1.1. Motivation
1.2. Deep Learning
1.3. Challenges in Real-World Scenarios
1.4. Central Attention
1.5. Dual-Path CNN
1.6. Mobile Application
1.7. The Aim of the Study
1.8. Related Works
1.8.1. Deep learning
1.8.2. Mobile Applications
2. Method
2.1. Dataset
2.2. Implementation and Preprocess
2.3. Central Attention
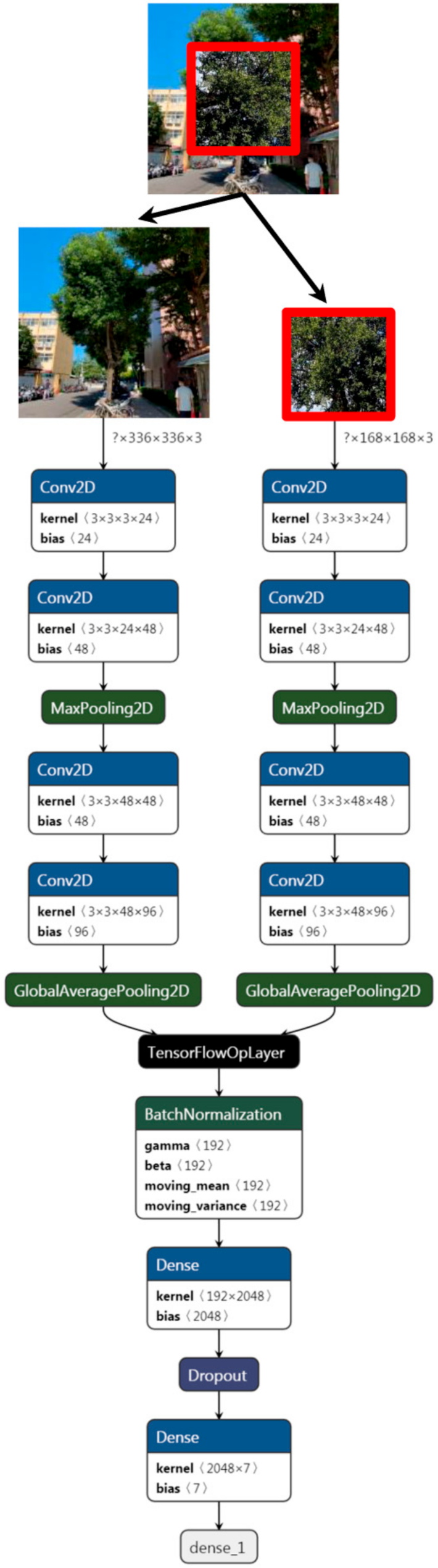
2.4. Dual-Path CNN
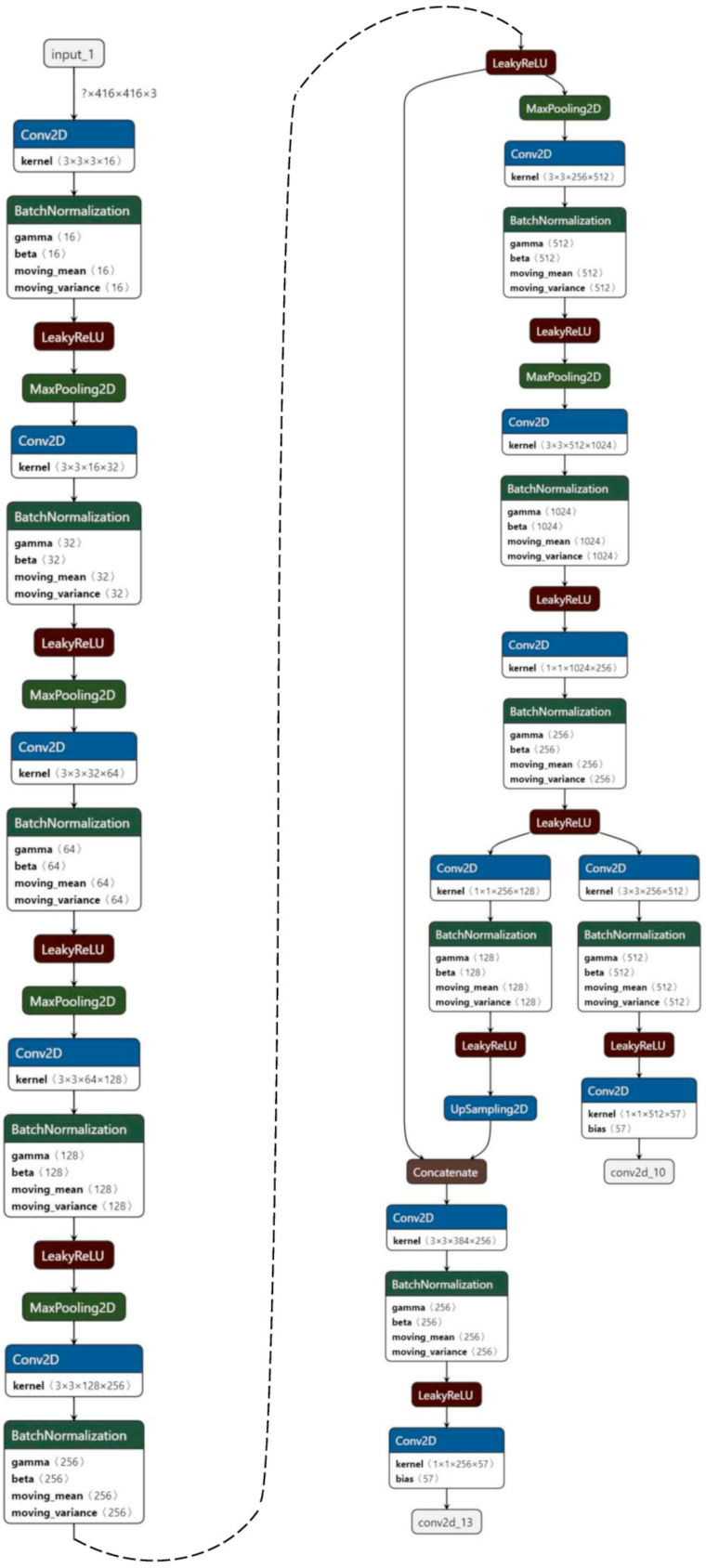
2.5. Object Detection
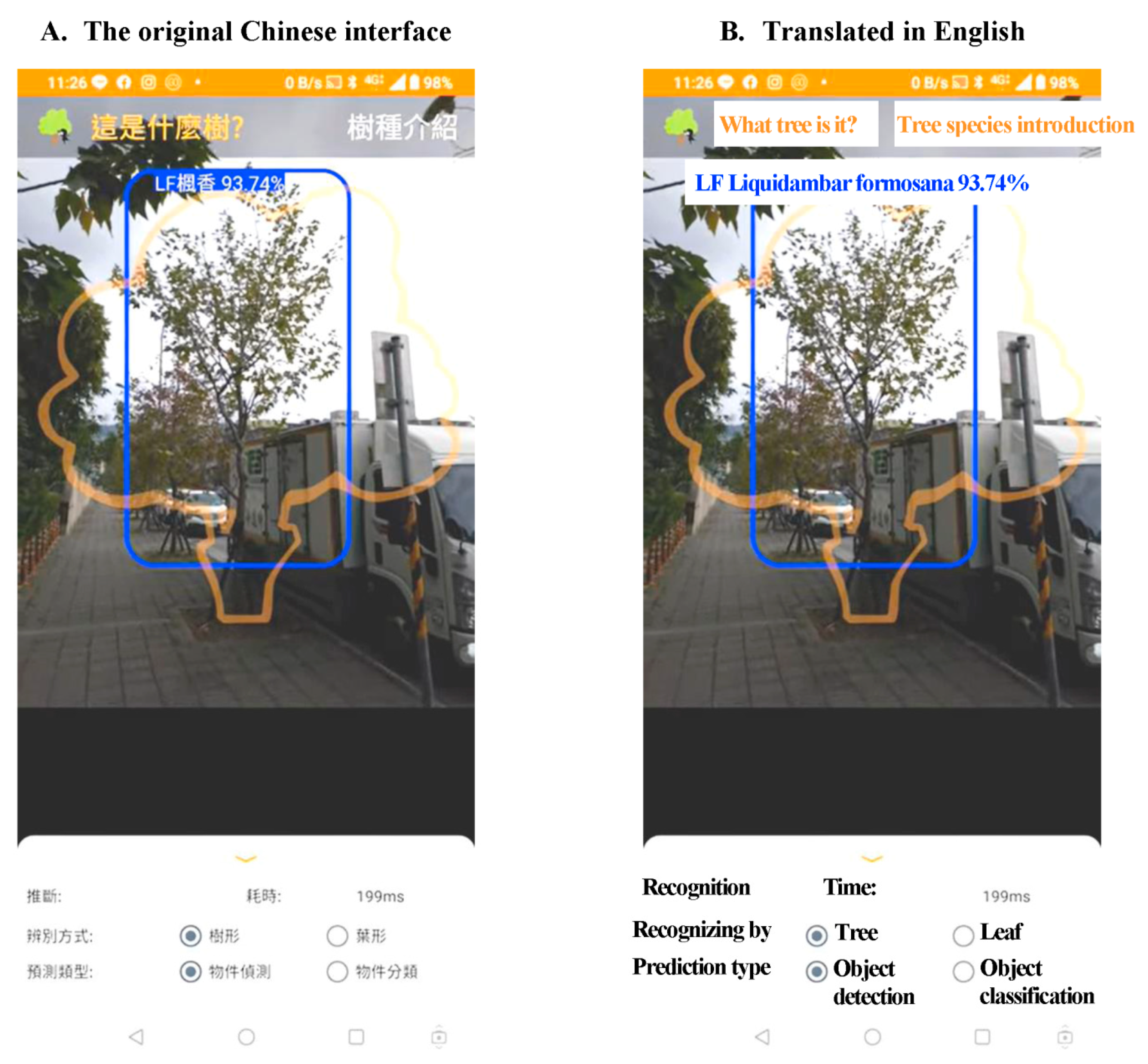
2.6. Mobile Implementation
3. Result
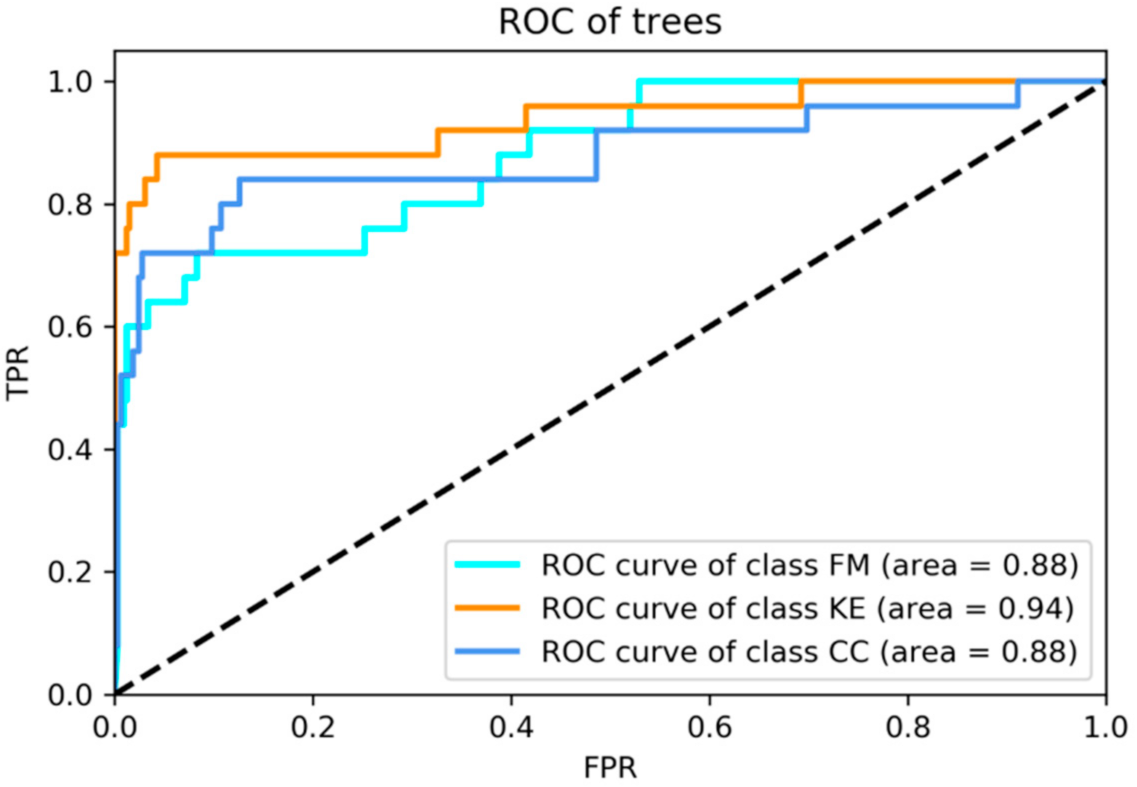
Central Attention and Dual-Path CNN
4. Discussion
4.1. Central Attention and Dual-Path CNN
4.2. Challenges of Sampling in Current Automated Plant Species Identification
4.3. Solutions to Insufficient Data Quantity
4.4. Transfer Learning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bodhwani, V.; Acharjya, D.; Bodhwani, U. Deep Residual Networks for Plant Identification. Procedia Comput. Sci. 2019, 152, 186–194. [Google Scholar] [CrossRef]
- Elphick, C.S. How you count counts: The importance of methods research in applied ecology. J. Appl. Ecol. 2008, 45, 1313–1320. [Google Scholar] [CrossRef]
- Darwin, C.R. On the Origin of Species by Means of Natural Selection, or the Preservation of Favoured Races in the Struggle for Life. Br. Foreign Med. Chir. Rev. 1860, 25, 367–404. [Google Scholar]
- Wäldchen, J.; Rzanny, M.; Seeland, M.; Mäder, P. Automated plant species identification—Trends and future directions. PLoS Comput. Biol. 2018, 14, e1005993. [Google Scholar] [CrossRef] [Green Version]
- Ceballos, G.; Ehrlich, P.R.; Barnosky, A.D.; García, A.; Pringle, R.M.; Palmer, T.M. Accelerated modern human–induced species losses: Entering the sixth mass extinction. Sci. Adv. 2015, 1, e1400253. [Google Scholar] [CrossRef] [Green Version]
- Hopkins, G.W.; Freckleton, R.P. Declines in the numbers of amateur and professional taxonomists: Implications for conservation. Anim. Conserv. 2002, 5, 245–249. [Google Scholar] [CrossRef]
- Bertrand, S.; Ben Ameur, R.; Cerutti, G.; Coquin, D.; Valet, L.; Tougne, L. Bark and leaf fusion systems to improve automatic tree species recognition. Ecol. Inform. 2018, 46, 57–73. [Google Scholar] [CrossRef]
- Austen, G.E.; Bindemann, M.; Griffiths, R.A.; Roberts, D.L. Species identification by experts and non-experts: Comparing images from field guides. Sci. Rep. 2016, 6, 33634. [Google Scholar] [CrossRef]
- Lee, S.H.; Chan, C.S.; Mayo, S.J.; Remagnino, P. How deep learning extracts and learns leaf features for plant classification. Pattern Recognit. 2017, 71, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Gao, M.; Lin, L.; Sinnott, R.O. A Mobile Application for Plant Recognition through Deep Learning. In Proceedings of the 2017 IEEE 13th International Conference on e-Science (e-Science), Auckland, New Zealand, 24–27 October 2017; pp. 29–38. [Google Scholar]
- Söderkvist, O. Computer Vision Classification of Leaves from Swedish Trees. Master’s Thesis, Linköping University, Linköping, Sweden, 2001. [Google Scholar]
- Wu, S.G.; Bao, F.S.; Xu, E.Y.; Wang, Y.-X.; Chang, Y.-F.; Xiang, Q.-L. A leaf recognition algorithm for plant classification using probabilistic neural network. In Proceedings of the 2007 IEEE international symposium on signal processing and information technology, Giza, Egypt, 15–18 December 2007; pp. 11–16. [Google Scholar]
- Agarwal, G.; Belhumeur, P.; Feiner, S.; Jacobs, D.; Kress, W.J.; Ramamoorthi, R.; Bourg, N.A.; Dixit, N.; Ling, H.; Mahajan, D. First steps toward an electronic field guide for plants. Taxon 2006, 55, 597–610. [Google Scholar] [CrossRef]
- Hu, R.; Jia, W.; Ling, H.; Huang, D. Multiscale distance matrix for fast plant leaf recognition. IEEE Trans. Image Process. 2012, 21, 4667–4672. [Google Scholar]
- Goëau, H.; Bonnet, P.; Joly, A. Overview of Life CLEF Plant Identification task 2019: Diving into data deficient tropical countries. In Proceedings of the CLEF 2019—Conference and Labs of the Evaluation Forum, Lugano, Switzerland, 9 September 2019; pp. 1–13. [Google Scholar]
- Qi, Y.; Zhang, S.; Qin, L.; Huang, Q.; Yao, H.; Lim, J.; Yang, M.-H. Hedging deep features for visual tracking. IEEE Trans. Pattern Anal. Machine Intell. 2018, 41, 1116–1130. [Google Scholar] [CrossRef]
- Kim, S.; Kim, B.; Kim, D. Tree recognition for landscape using by combination of features of its leaf, flower and bark. In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011; pp. 1147–1151. [Google Scholar]
- Feitoza, M.C.; da Silva, W.B.; Calumby, R.T. Exploring Deep Features and Transfer Learning for Plant Species Recognition. In Proceedings of the XV Brazilian Symposium on Information Systems, Aracaju, Brazil, 8 May 2019; p. 54. [Google Scholar]
- Xiao, Q.; Li, G.; Xie, L.; Chen, Q. Real-world plant species identification based on deep convolutional neural networks and visual attention. Ecol. Inform. 2018, 48, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Levine, M.D.; An, X.; Xu, X.; He, H. Visual saliency based on scale-space analysis in the frequency domain. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 996–1010. [Google Scholar] [CrossRef] [Green Version]
- Abdelmaguid, E.; Huang, J.; Kenchareddy, S.; Singla, D.; Wilke, L.; Nguyen, M.H.; Altintas, I. Left ventricle segmentation and volume estimation on cardiac mri using deep learning. arXiv 2018, arXiv:1809.06247. [Google Scholar]
- Vig, E.; Dorr, M.; Cox, D. Large-scale optimization of hierarchical features for saliency prediction in natural images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2798–2805. [Google Scholar]
- Liu, N.; Han, J.; Zhang, D.; Wen, S.; Liu, T. Predicting eye fixations using convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 362–370. [Google Scholar]
- Jiang, M.; Huang, S.; Duan, J.; Zhao, Q. Salicon: Saliency in context. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015; pp. 1072–1080. [Google Scholar]
- Pan, J.; Sayrol, E.; Giro-i-Nieto, X.; McGuinness, K.; O’Connor, N.E. Shallow and deep convolutional networks for saliency prediction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 598–606. [Google Scholar]
- Marchesotti, L.; Cifarelli, C.; Csurka, G. A framework for visual saliency detection with applications to image thumbnailing. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2232–2239. [Google Scholar]
- Sun, J.; Ling, H. Scale and object aware image thumbnailing. Int. J. Comput. Vis. 2013, 104, 135–153. [Google Scholar] [CrossRef]
- Chen, J.; Bai, G.; Liang, S.; Li, Z. Automatic image cropping: A computational complexity study. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 507–515. [Google Scholar]
- Wang, W.; Shen, J.; Porikli, F. Saliency-aware geodesic video object segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015; pp. 3395–3402. [Google Scholar]
- Wang, W.; Shen, J.; Shao, L. Consistent Video Saliency Using Local Gradient Flow Optimization and Global Refinement. IEEE Trans. Image Process. 2015, 24, 4185–4196. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Shen, J.; Shao, L.; Porikli, F. Correspondence driven saliency transfer. IEEE Trans. Image Process. 2016, 25, 5025–5034. [Google Scholar] [CrossRef]
- Wang, W.; Shen, J.; Yang, R.; Porikli, F. Saliency-aware video object segmentation. IEEE Trans. Pattern Anal. Machine Intell. 2017, 40, 20–33. [Google Scholar] [CrossRef]
- Rizk, S. Plant Leaf Classification Using Dual Path Convolutional Neural Networks. Master’s Thesis, Notre Dame University-Louaize, Kesrwan, Lebanon, 2019. [Google Scholar]
- Pan, J.; Sun, H.; Song, Z.; Han, J. Dual-Resolution Dual-Path Convolutional Neural Networks for Fast Object Detection. Sensors 2019, 19, 3111. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Liu, Q.; Gui, J.; Gu, D.; Hu, H. Indoor Relocalization in Challenging Environments With Dual-Stream Convolutional Neural Networks. IEEE Trans. Autom. Sci. Eng. 2018, 15, 651–662. [Google Scholar] [CrossRef]
- He, G.; Xia, Z.; Zhang, Q.; Zhang, H.; Fan, J. Plant Species Identification by Bi-channel Deep Convolutional Networks. J. Phys. Conf. Ser. 2018, 1004, 012015. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Chiang, C.-K. Auxiliary Structure for Convolutional Neural Network Training. In Proceedings of the 2018 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Honolulu, HI, USA, 12–15 November 2018; pp. 1995–1999. [Google Scholar]
- Weng, Y.; Zeng, R.; Wu, C.; Wang, M.; Wang, X.; Liu, Y. A survey on deep-learning-based plant phenotype research in agriculture. Sci. Sin. Vitae 2019, 49, 698–716. [Google Scholar] [CrossRef] [Green Version]
- Wäldchen, J.; Mäder, P. Plant Species Identification Using Computer Vision Techniques: A Systematic Literature Review. Arch. Comput. Methods Eng. 2018, 25, 507–543. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Brown, D.; Gao, Y.; Salle, J.L. Mobile plant leaf identification using smart-phones. In Proceedings of the 2013 IEEE International Conference on Image Processing, Melbourne, Australia, 15–18 September 2013; pp. 4417–4421. [Google Scholar]
- Glority Software Ltd. Xingse. Available online: http://www.xingseapp.com/ (accessed on 1 December 2020).
- Kumar, N.; Belhumeur, P.N.; Biswas, A.; Jacobs, D.W.; Kress, W.J.; Lopez, I.C.; Soares, J.V.B. Leafsnap: A Computer Vision System for Automatic Plant Species Identification. In Proceedings of the European conference on computer vision, Florence, Italy, 7–13 October 2012; pp. 502–516. [Google Scholar]
- Goëau, H.; Bonnet, P.; Joly, A.; Bakić, V.; Barbe, J.; Yahiaoui, I.; Selmi, S.; Carré, J.; Barthélémy, D.; Boujemaa, N. Pl@ ntnet mobile app. In Proceedings of the 21st ACM International Conference on Multimedia, Barcelona, Spain, 21–25 October 2013; pp. 423–424. [Google Scholar]
- Van Horn, G.; Mac Aodha, O.; Song, Y.; Cui, Y.; Sun, C.; Shepard, A.; Adam, H.; Perona, P.; Belongie, S. The inaturalist species classification and detection dataset. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8769–8778. [Google Scholar]
- Zhu, H.; Liu, Q.; Qi, Y.; Huang, X.; Jiang, F.; Zhang, S. Plant identification based on very deep convolutional neural networks. Multimedia Tools Appl. 2018, 77, 29779–29797. [Google Scholar] [CrossRef]
- Lee, S.H.; Chan, C.S.; Wilkin, P.; Remagnino, P. Deep-plant: Plant identification with convolutional neural networks. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 452–456. [Google Scholar]
- Chopra, M. TreeID: An Image Recognition System for Plant Species Identification; Report in cs231n of Stanford University: Stanford, CA, USA, 2015. [Google Scholar]
- Wu, Y.-H.; Shang, L.; Huang, Z.-K.; Wang, G.; Zhang, X.-P. Convolutional Neural Network Application on Leaf Classification. In Proceedings of the International Conference on Intelligent Computing (ICIC): Intelligent Computing Theories and Application Cham, Lanzhou, China, 2–5 August 2016; pp. 12–17. [Google Scholar]
- Quoc Bao, T.; Tan Kiet, N.T.; Quoc Dinh, T.; Hiep, H.X. Plant species identification from leaf patterns using histogram of oriented gradients feature space and convolution neural networks. J. Info. Telecommun. 2019, 4, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Zhou, P.; Li, C.; Liu, L. A convolutional neural network for leaves recognition using data augmentation. In Proceedings of the 2015 IEEE International Conference on Computer and Information Technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing, Liverpool, UK, 26–28 October 2015; pp. 2143–2150. [Google Scholar]
- Barré, P.; Stöver, B.C.; Müller, K.; Steinhage, V. LeafNet: A computer vision system for automatic plant species identification. Ecol. Inform. 2017, 40, 50–56. [Google Scholar] [CrossRef]
- Pearline, S.A.; Kumar, V.S.; Harini, S. A study on plant recognition using conventional image processing and deep learning approaches. J. Intell. Fuzzy Syst. 2019, 36, 1997–2004. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y.; Wang, G.; Zhang, H. Deep Learning for Plant Identification in Natural Environment. Comput. Intell. Neurosci. 2017, 2017, 1–6. [Google Scholar] [CrossRef]
- Joly, A.; Goëau, H.; Botella, C.; Glotin, H.; Bonnet, P.; Vellinga, W.-P.; Planqué, R.; Müller, H. Overview of LifeCLEF 2018: A Large-Scale Evaluation of Species Identification and Recommendation Algorithms in the Era of AI; CLEF (Cross-Language Evaluation Forum): Avignon, France, 2018; pp. 247–266. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In Proceedings of the European Conference on Computer Vision (ECCV 2016), Amsterdam, The Netherlands, 11–14 October 2016; pp. 630–645. [Google Scholar]
- Belhumeur, P.N.; Chen, D.; Feiner, S.; Jacobs, D.W.; Kress, W.J.; Ling, H.; Lopez, I.; Ramamoorthi, R.; Sheorey, S.; White, S.; et al. Searching the World’s Herbaria: A System for Visual Identification of Plant Species. In Proceedings of the European Conference on Computer Vision (ECCV 2008), Marseille, France, 12–18 October 2008; pp. 116–129. [Google Scholar]
- Cerutti, G.; Tougne, L.; Mille, J.; Vacavant, A.; Coquin, D. Understanding leaves in natural images—A model-based approach for tree species identification. Comput. Vis. Image Underst. 2013, 117, 1482–1501. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.-H.; Zhao, Z.-Q.; Wang, J. ApLeafis: An Android-Based Plant Leaf Identification System. Comput. Vis. 2013, 7995, 106–111. [Google Scholar]
- Nguyen, Q.-K.; Le, T.-L.; Pham, N.-H. Leaf based plant identification system for Android using SURF features in combination with Bag of Words model and supervised learning. In Proceedings of the 2013 International Conference on Advanced Technologies for Communications (ATC 2013), Ho Chi Minh City, Vietnam, 16–18 October 2013; pp. 404–407. [Google Scholar]
- Carranza-Rojas, J.; Mata-Montero, E. Combining leaf shape and texture for Costa Rican plant species identification. CLEI Electr. J. 2016, 19, 7. [Google Scholar]
- Prasad, S.; Peddoju, S.K.; Ghosh, D.; Prasad, S. Mobile plant species classification: A low computational approach. In Proceedings of the 2013 IEEE Second International Conference on Image Information Processing (ICIIP-2013), Shimla, India, 9–11 December 2013; pp. 405–409. [Google Scholar]
- Priyankara, H.A.C.; Withanage, D.K. Computer assisted plant identification system for Android. In Proceedings of the 2015 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 7–8 April 2015; pp. 148–153. [Google Scholar]
- Zhao, Z.-Q.; Ma, L.-H.; Cheung, Y.-M.; Wu, X.; Tang, Y.; Chen, C.L.P. ApLeaf: An efficient android-based plant leaf identification system. Neurocomputing 2015, 151, 1112–1119. [Google Scholar] [CrossRef]
- Gajjar, V.; Lai, Z.-H.; Kosbar, K. Fast classification of leaf images for agricultural remote sensing applications. Int. Telemeter. Conf. Proceed. 2018, 54. [Google Scholar]
- Mishra, P.K.; Maurya, S.K.; Singh, R.K.; Misra, A.K. A semi automatic plant identification based on digital leaf and flower images. In Proceedings of the IEEE-International Conference On Advances In Engineering, Science And Management (ICAESM-2012), Nagapattinam, India, 30–31 March 2012; pp. 68–73. [Google Scholar]
- Columbia University; University of Maryland; Smithsonian Institution. Leafsnap. Available online: https://itunes.apple.com/us/app/leafsnap/id430649829 (accessed on 1 December 2020).
- Affouard, A.; Goëau, H.; Bonnet, P.; Lombardo, J.-C.; Joly, A. Pl@ ntnet app in the era of deep learning. In Proceedings of the ICLR 2017, Toulon, France, 24–26 April 2017. [Google Scholar]
- Joly, A.; Müller, H.; Goëau, H.; Glotin, H.; Spampinato, C.; Rauber, A.; Bonnet, P.; Vellinga, W.-P.; Fisher, B. LifeCLEF: Multimedia Life Species Identification; EMR@ ICMR: Orlando, FL, USA, 2014; pp. 7–13. [Google Scholar]
- Crocker, E.V.; Condon, B.; Almsaeed, A.; Jarret, B.; Nelson, C.D.; Abbott, A.G.; Main, D.; Staton, M.E. TreeSnap: A citizen science app connecting tree enthusiasts and forest scientists. PLANTS PEOPLE Planet. 2019, 2, 47–52. [Google Scholar] [CrossRef]
- Ralls, E. Systems and methods for electronically identifying plant species. Google Patents WO2020056148A1, 2018. [Google Scholar]
- Cody, C.; Brown, C.; Mignotte, N. WildSnap: Mobile Android Application for Wildlife/Plant Identification; North Carolina State University: Raleigh, NC, USA, 2018. [Google Scholar]
- Kesifler Dunyasi LTD. Discovery Green Lab. Forest Tree Identification. Available online: https://play.google.com/store/apps/details?id=com.kesiflerdunyasi.foresttreeidentification&hl=en_US (accessed on 1 December 2020).
- Rahman, M.; Khan, A.A.; Shameem, M.; Uddin, B. Flower Identification Using Machine Learning. Bachelor’s Thesis, Daffodil International University, Dhaka, Bangladesh, 2018. [Google Scholar]
- Levesquea, C. About My Woods–A New Mobile App for Forest Landowners: A New Tool to Encourage Stewardship. J. Forest. 2016, 114, 170–171. [Google Scholar]
- Bugwood. Southeast Early Detection Network. Available online: https://apps.bugwood.org/apps/seedn/ (accessed on 1 December 2020).
- Gee, S. iNaturalist Launches Deep Learning-Based Identification App. Available online: https://www.i-programmer.info/news/105-artificial-intelligence/10848-inaturalist.html/ (accessed on 1 December 2020).
- Wäldchen, J.; Mäder, P. Machine learning for image based species identification. Methods Ecol. Evol. 2018, 9, 2216–2225. [Google Scholar] [CrossRef]
- Goëau, H.; Joly, A.; Bonnet, P.; Selmi, S.; Molino, J.-F.; Barthélémy, D.; Boujemaa, N. Lifeclef plant identification task. In Proceedings of the CLEF2014 Working Notes. Working Notes for CLEF 2014 Conference, Sheffield, UK, 15–18 September 2014; pp. 598–615. [Google Scholar]
- Parks and Street Lights Office; Public Works Department. Street Trees Information Website. Available online: https://trees.gov.taipei (accessed on 1 December 2020).
- Shao, K.T. Catalogue of Life in Taiwan. Available online: http://taibnet.sinica.edu.tw (accessed on 1 December 2020).
- Lu, F.Y.; Ou, C.X.; Lu, J.C. Taiwan Tree Commentary; Council of Agriculture, Executive Yuan: Taipei, Taiwan, 2000. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Lasseck, M. Image-based Plant Species Identification with Deep Convolutional Neural Networks. In Proceedings of the CLEF (Working Notes), CLEF 2017—Conference and Labs of the Evaluation Forum, Dublin, Ireland, 11–14 September 2017. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. Conf. Proc. 2016, 2818–2826. [Google Scholar] [CrossRef] [Green Version]
- Al-Qurran, R.; Al-Ayyoub, M.; Shatnawi, A. Plant Classification in the Wild: A Transfer Learning Approach. In Proceedings of the 2018 International Arab Conference on Information Technology (ACIT), Werdanye, Lebanon, 28–30 November 2018; pp. 1–5. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Tzutalin. LabelImg. Git Code. Available online: https://github.com/tzutalin/labelImg (accessed on 1 December 2020).
- Xiao, D.; Shan, F.; Li, Z.; Le, B.T.; Liu, X.; Li, X. A target detection model based on improved tiny-Yolov3 under the environment of mining truck. IEEE Access 2019, 7, 123757–123764. [Google Scholar] [CrossRef]
- Anh, H.N. Training and Detecting Objects with YOLO. Available online: https://github.com/experiencor/keras-yolo3 (accessed on 1 December 2020).
- qqwweee. A Keras Implementation of YOLOv3 (Tensorflow Backend). Available online: https://github.com/qqwweee/keras-yolo3 (accessed on 1 December 2020).
- Chong, K.; Ibrahim, A. Bringing defensive artificial intelligence capabilities to mobile devices. In Proceedings of the 16th Australian Information Security Management Conference, Perth, Australia, 4–6 January 2018; pp. 41–50. [Google Scholar]
- Richoz, S.; Perez-Uribe, A.; Birch, P.; Roggen, D. Benchmarking deep classifiers on mobile devices for vision-based transportation recognition. In Proceedings of the Adjunct Proceedings of the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2019 ACM International Symposium on Wearable Computers, London, UK, 11–13 September 2019; Association for Computing Machinery (ACM): London, UK, 2019; pp. 803–807. [Google Scholar]
- TensorFlow. Model Optimization. Available online: https://www.tensorflow.org/lite/performance/model_optimization (accessed on 1 December 2020).
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. arXiv 2016, arXiv:1602.07261. [Google Scholar]
- Šulc, M.; Matas, J. Fine-grained recognition of plants from images. Plant. Methods 2017, 13, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Sulc, M.; Picek, L.; Matas, J. Plant Recognition by Inception Networks with Test-time Class Prior Estimation. In Proceedings of the CLEF (Working Notes), Avignon, France, 10–14 September 2018. [Google Scholar]
- Picon, A.; Medela, A. Constellation loss: Improving the efficiency of deep metric learning loss functions for the optimal embedding of histopathological images. J. Pathol. Inform. 2020, 11, 38. [Google Scholar] [CrossRef]
- Shah, M.P.; Singha, S.; Awate, S.P. Leaf classification using marginalized shape context and shape+texture dual-path deep convolutional neural network. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 860–864. [Google Scholar]
- Sun, Y.; Zuo, W.; Liu, M. RTFNet: RGB-Thermal Fusion Network for Semantic Segmentation of Urban Scenes. IEEE Robot. Autom. Lett. 2019, 4, 2576–2583. [Google Scholar] [CrossRef]
- Ha, Q.; Watanabe, K.; Karasawa, T.; Ushiku, Y.; Harada, T. MFNet: Towards real-time semantic segmentation for autonomous vehicles with multi-spectral scenes. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5108–5115. [Google Scholar]
- Sun, Y.; Zuo, W.; Yun, P.; Wang, H.; Liu, M. FuseSeg: Semantic Segmentation of Urban Scenes Based on RGB and Thermal Data Fusion. IEEE Trans. Autom. Sci. Eng. 2020, 1–12. [Google Scholar] [CrossRef]
- Song, S.; Lichtenberg, S.P.; Xiao, J. SUN RGB-D: A RGB-D scene understanding benchmark suite. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 567–576. [Google Scholar]
- Wang, H.; Sun, Y.; Liu, M. Self-Supervised Drivable Area and Road Anomaly Segmentation Using RGB-D Data For Robotic Wheelchairs. IEEE Robot. Autom. Lett. 2019, 4, 4386–4393. [Google Scholar] [CrossRef]
- Azlah, M.A.F.; Chua, L.S.; Rahmad, F.R.; Abdullah, F.I.; Alwi, S.R.W. Review on Techniques for Plant Leaf Classification and Recognition. Computers 2019, 8, 77. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Chen, Z.; Yang, M.; Zhang, R.; Cui, Y. A Multiscale Fusion Convolutional Neural Network for Plant Leaf Recognition. IEEE Signal. Process. Lett. 2018, 25, 853–857. [Google Scholar] [CrossRef]
- Griffin, G.; Holub, A.; Perona, P. Caltech-256 Object Category Dataset; CalTech Report: Pasadena, CA, USA, 2007. [Google Scholar]
- Wick, C.; Puppe, F. Leaf Identification Using a Deep Convolutional Neural Network. arXiv 2017, arXiv:1712.00967. [Google Scholar]
- Reyes, A.K.; Caicedo, J.C.; Camargo, J.E. Fine-tuning Deep Convolutional Networks for Plant Recognition. CLEF 2015, 1391, 467–475. [Google Scholar]
- Toma, A.; Stefan, L.-D.; Ionescu, B. UPB HES SO@ PlantCLEF 2017: Automatic Plant Image Identification using Transfer Learning via Convolutional Neural Networks. In Proceedings of the CLEF (Working Notes), Dublin, Ireland, 11–14 September 2017. [Google Scholar]
- Su, Y.; Chiu, T.; Yeh, C.; Huang, H.; Hsu, W.H. Transfer learning for video recognition with scarce training data. arXiv 2014, arXiv:1409.4127. [Google Scholar]
- Song, Y.-N.; Zhang, H.-L.; Chang, C.-J.; Bollag, D.M. Cytotoxic Cyclolignans from Koelreuteria henryi. J. Nat. Prod. 1994, 57, 1670–1674. [Google Scholar] [CrossRef] [PubMed]
- Chien, S.-C.; Xiao, J.-H.; Tseng, Y.-H.; Kuo, Y.-H.; Wang, S.-Y. Composition and antifungal activity of balsam from Liquidambar formosana Hance. Holzforschung 2013, 67, 345–351. [Google Scholar] [CrossRef]
- He, X.; Chen, Y.; Ghamisi, P. Heterogeneous Transfer Learning for Hyperspectral Image Classification Based on Convolutional Neural Network. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 3246–3263. [Google Scholar] [CrossRef]
- Vasu, B. Re: Deep Learning—Transfer Learning from One Image Classification Dataset to another—Scientific Process? Available online: https://www.researchgate.net/post/Deep-Learning-transfer-learning-from-one-image-classification-dataset-to-another-Scientific-process/5dcb3691b93ecd25404fb185/citation/download. (accessed on 1 December 2020).
- Li, X.; Zhang, L.; Du, B.; Zhang, L.; Shi, Q. Iterative Reweighting Heterogeneous Transfer Learning Framework for Supervised Remote Sensing Image Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017, 10, 2022–2035. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors, Year | Image Type | Dataset | Method | Accuracy |
|---|---|---|---|---|
| Lee et al., 2015, 2017 [9,46] | Leaf | MalayaKew Leaf dataset | Convolutional Neural Network (CNN) + AlexNet | 99.7% |
| Chopra, 2015 [47] | Leaf | TreeID | Three-layer CNN | 75% |
| Wu et al., 2016 [48] | Leaf | ICL | Four-layer CNN + PReLU activation function | 94.8% |
| Bao et al., 2019 [49] | Leaf | Flavia and Swedish leaf dataset | Histogram of oriented gradients (HOG) + support vector machine (SVM) classifier + five-layer CNN | 95.6% |
| Zhang et al., 2015 [50] | Leaf | Flavia | Seven-layer CNN | 94.69% |
| Barre et al., 2017 [51] | Leaf | LeafSnap, Flavia, and Foliage datasets | 17-layer CNN | 97.9% |
| Zhu et al., 2018 [45] | Leaf, flower, fruit, branch, stem | LifeCLEF2015 dataset | 19-layers CNN + SVM | Leaf (67.10%), flower (88.80%), fruit (90.20%), branch (71.20%), stem (65.20%) |
| Pearline et al., 2019 [52] | Leaf | Leaf12 dataset | VGG 16 CNN architecture with logistic regression (LR) | 97.14% |
| Folio, Flavia, and Swedish leaf datasets | VGG 19 CNN architecture with LR classifier | Folio (96.53%), Flavia (96.25%) Swedish (99.41%) | ||
| Goëau et al., 2019 [15] | Plant | LifeCLEF2019 plant dataset | InceptionV4 and Inception-ResNet-v2 CNN | 31.6% |
| Sun et al., 2017 [53] | Leaf | Flavia, BJFU100 datasets | 26-layer ResNet | Flavia (99.65%), BJFU100 (91.78%) |
| Bodhwani et al., 2019 [1] | Leaf | LeafSnap | 50-layer deep residual learning framework | 93.09% |
| Authors, Year | Image Type | Mobile Applications | Method | Accuracy |
|---|---|---|---|---|
| Belhumeur et al., 2008 [56] | Leaf | LeafView | Nearest neighbor (NN) classifier | Top ten matches 90–97% |
| Kumar et al., [42] | Leaf | Leafsnap | NN | 73% |
| Goëau et al., 2013 [43] | Leaf, flower, fruit and bark | Pl@ntNet | Approximate k-NN search + administration of material purchases -local sensitive hashing (AMP-LSH) | 69% top-5 identification rate |
| Cerutti et al., 2013 [57] | Leaf | Not available (N/A) | Linear regression (LR) + adaptive local mean (AM) | N/A |
| Ma et al., 2013 [58] | Leaf | ApLeafis | Content-based image retrieval (CBIR) HSV (Hue, Saturation, Value), Wavelet, pyramid histogram of orientated gradients (Phog) + tophat + cropped | 90% |
| Nguyen et al., 2013 [59] | Leaf | N/A | Speeded Up Robust Features (SURF) + Bag of Words (BOW) + support vector machine (SVM) | 95.94% [60] |
| Prasad et al., 2013 [61]. | Leaf | N/A | k-NN classifier | 70.09–91.34% |
| Wang et al., 2013 [40]. | Leaf | N/A | Multiscale shape descriptor based on the concave and convex measures + k-NN | 86.86–96.05% |
| Priyankara et al., 2015 [62] | Leaf | N/A | Scale Invariant Feature Transform (SIFT) + BOW feature vector + SVM classifier. | 96.48% |
| Zhao et al., 2015 [63] | Leaf | ApLeaf | HSV, Wavelet, Phog + tophat + cropped | 90% |
| Van Horn et al., 2017 [44] | Plant and animal | iNaturalist | Inception ResNetV2 + Squeeze-and-Excitation (SE) blocks | 67.3% |
| Class Label | Image Count |
|---|---|
| Koelreuteria henryi | 203 |
| Liquidambar formosana | 150 |
| Ficus microcarpa | 295 |
| Terminalia catappa | 62 |
| Cinnamomum camphora | 201 |
| Delonix regia | 105 |
| Alstonia scholaris | 96 |
| Roystonea regia | 68 |
| Cassia fistula | 105 |
| Bischofia javanica | 164 |
| Melia azedarach | 56 |
| Melaleuca leucadendra | 100 |
| Terminalia mantaly | 170 |
| Millettia pinnata | 68 |
| Total image count | 1843 |
| K-Fold | 5-Fold (Training Data Size = 1754, Testing Data Size = 439) | 10-Fold (Training Data Size = 1973, Testing Data Size = 220) | ||
|---|---|---|---|---|
| Method | InceptionResNetV2 | The Proposed Method | InceptionResNetV2 | The Proposed Method |
| Accuracy | 56.95 | 69.02 | 71.36 | 75.48 |
| K-Fold | 5-Fold (Training Data Size = 1754, Testing Data Size = 439) | 10-Fold (Training Data Size = 1843, Testing Data Size = 350) | ||||||
|---|---|---|---|---|---|---|---|---|
| Method | InceptionResNetV2 | The Proposed Method | InceptionResNetV2 | The Proposed Method | ||||
| Class | TPR | AUC | TPR | AUC | TPR | AUC | TPR | AUC |
| AS | 0.7297 | 0.8201 | 0.8919 | 0.8726 | 0.7500 | 0.8275 | 0.7500 | 0.8325 |
| BJ | 0.7083 | 0.7813 | 0.6875 | 0.7760 | 0.7500 | 0.8112 | 0.6250 | 0.7513 |
| CC | 0.4500 | 0.6962 | 0.4250 | 0.6849 | 0.4615 | 0.6870 | 0.6154 | 0.7561 |
| DR | 0.6667 | 0.8020 | 0.6667 | 0.8092 | 0.2500 | 0.6178 | 0.4167 | 0.6867 |
| FM | 0.7302 | 0.7959 | 0.7302 | 0.8012 | 0.7857 | 0.8304 | 0.8571 | 0.8478 |
| KE | 0.6905 | 0.7986 | 0.7857 | 0.8412 | 0.8125 | 0.8523 | 0.8125 | 0.8695 |
| LF | 0.6061 | 0.7735 | 0.7576 | 0.8320 | 0.9231 | 0.9108 | 1.0000 | 0.9517 |
| MA | 0.6316 | 0.7515 | 0.1579 | 0.5730 | 0.5000 | 0.7360 | 0.1667 | 0.5740 |
| MI | 0.1923 | 0.5877 | 0.4231 | 0.6982 | 1.0000 | 0.9328 | 0.7368 | 0.8311 |
| MP | 0.5333 | 0.7478 | 0.6000 | 0.7800 | 0.8000 | 0.8762 | 0.7000 | 0.8262 |
| PC | 0.8148 | 0.8613 | 0.8889 | 0.9080 | 1.0000 | 0.9539 | 0.9286 | 0.9182 |
| RR | 1.0000 | 0.9752 | 0.8750 | 0.9210 | 0.7500 | 0.8608 | 1.0000 | 0.9764 |
| TC | 0.3571 | 0.6715 | 0.9286 | 0.9431 | 0.7500 | 0.8608 | 1.0000 | 0.9764 |
| TM | 0.8286 | 0.8623 | 0.9143 | 0.8792 | 0.8125 | 0.8695 | 0.9375 | 0.9295 |
| Average | 0.6385 | 0.7804 | 0.6952 | 0.8085 | 0.7390 | 0.8305 | 0.7533 | 0.8377 |
| Authors, Year | Image Type | Dataset | Method | Accuracy |
|---|---|---|---|---|
| Shah et al., 2017 [99] | Leaf | Flavia, Leafsnap, ImageClef | Dual-path deep convolutional neural network (CNN) Path 1: marginalized shape context Path 2: shape + texture | Flavia (99.28%), Leafsnap (95.61%), ImageClef (96.42%) |
| Lee et al., 2017 [9] | Leaf | MalayaKew Leaf dataset | Dual-path CNN Path 1: CNN Path 2: AlexNet | 99.7% |
| Rizk, 2019 [33] | Leaf | Flavia | Dual-path CNN Path 1: leaf shape feature extraction Path 2: leaf venation feature extraction | 96.8% |
| Pan et al., 2019 [34] | Pascal VOC: person, animal, vehicle, indoor (20 object classes) MS COCO: animal, vehicle, furniture, etc (91 classes) | Pascal VOC and MS COCO dataset | Dual-resolution/input dual-path CNNs (DualNets) Path 1: backbone path MobileNetV2 with 300 pixels input Path 2: auxiliary path with larger inputs (600 pixels) but less stacked layers Feature maps in the auxiliary path are fused with the corresponding backbone feature in a residual-learning manner as long as their dimensions meet. | 70.4% |
| Li et al., 2018 [35] | Fire, heads, chess, pumpkin, office, redktichen, and stairs | Microsoft 7-Scenes dataset | Dual-path CNN Path 1: color image inputs Path 2: depth image input | Relocalization accuracy improved by about 20% compared with the state-of-the-art deep learning method for pose regression |
| Chen and Chiang, 2018 [37] | Human actions People Playing Musical Instrument (PPMI): human interaction, musical instruments (48 classes) Willow: action (7 classes) Uiuc-sports: action (8 classes) | PPMI dataset, Willow dataset, Uiuc-sports dataset | Dual-path CNN Path 1: CNN Path 2: CNN pre-trained on a large dataset, a large generative deep learning model (e.g., AlexNet, GoogleNet) | PPMI (42.7%), Willow (44.8%), Uiuc-sports (81.6%) |
| Sun et al., 2019 [100] | Car, person, bike, curve, car stop, guardrail, color cone, bump | A public dataset [101] | Encoder-Decoder design concept ResNet RTFNet: RGB-Thermal Fusion Network. Fusing both the RGB and thermal information in a novel deep neural network | 63.1% |
| Sun et al., 2020 [102] | Car, person, bike, curve, car stop, guardrail, color cone, bump SUN-RGBD v1: room scenes, furniture, etc. | A public dataset [101], SUN-RGBD v1 dataset [103] | FuseSeg: RGB and thermal data fusion, generally consisting of two encoders to extract features from input images and one decoder to restore the resolution. The two encoders take as input the three-channel RGB and one-channel thermal images, respectively. DenseNet-161 | A public dataset (70.6%) SUN-RGBD v1 (38.3%) |
| Wang et al., 2019 [104] | 30 common scenes where robotic wheelchairs usually work (e.g., sidewalks and squares) 18 different kinds of road anomalies that robotic wheelchairs may encounter in real environments | Ground mobile robots perception dataset (RGB-D dataset) | Self-Supervised Label Generator (SSLG) + RGB-D data-based semantic segmentation neural networks | 75.57~88.19% |
| Our proposed method | Whole plant (long-range) | Self-collected dataset: 14 species of the most common and endemic trees in Taiwan | Dual-path CNN Path 1: InceptionV3 with original image inputs Path 2: InceptionV3 with central cropped image inputs | 77.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, Y.; Chou, C.-A.; Li, C.-Y. Central Attention and a Dual Path Convolutional Neural Network in Real-World Tree Species Recognition. Int. J. Environ. Res. Public Health 2021, 18, 961. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18030961
Chung Y, Chou C-A, Li C-Y. Central Attention and a Dual Path Convolutional Neural Network in Real-World Tree Species Recognition. International Journal of Environmental Research and Public Health. 2021; 18(3):961. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18030961
Chicago/Turabian StyleChung, Yi, Chih-Ang Chou, and Chih-Yang Li. 2021. "Central Attention and a Dual Path Convolutional Neural Network in Real-World Tree Species Recognition" International Journal of Environmental Research and Public Health 18, no. 3: 961. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18030961