
A Noise Control Method Using Adaptive Adjustable Parametric Array Loudspeaker to Eliminate Environmental Noise in Real Time

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
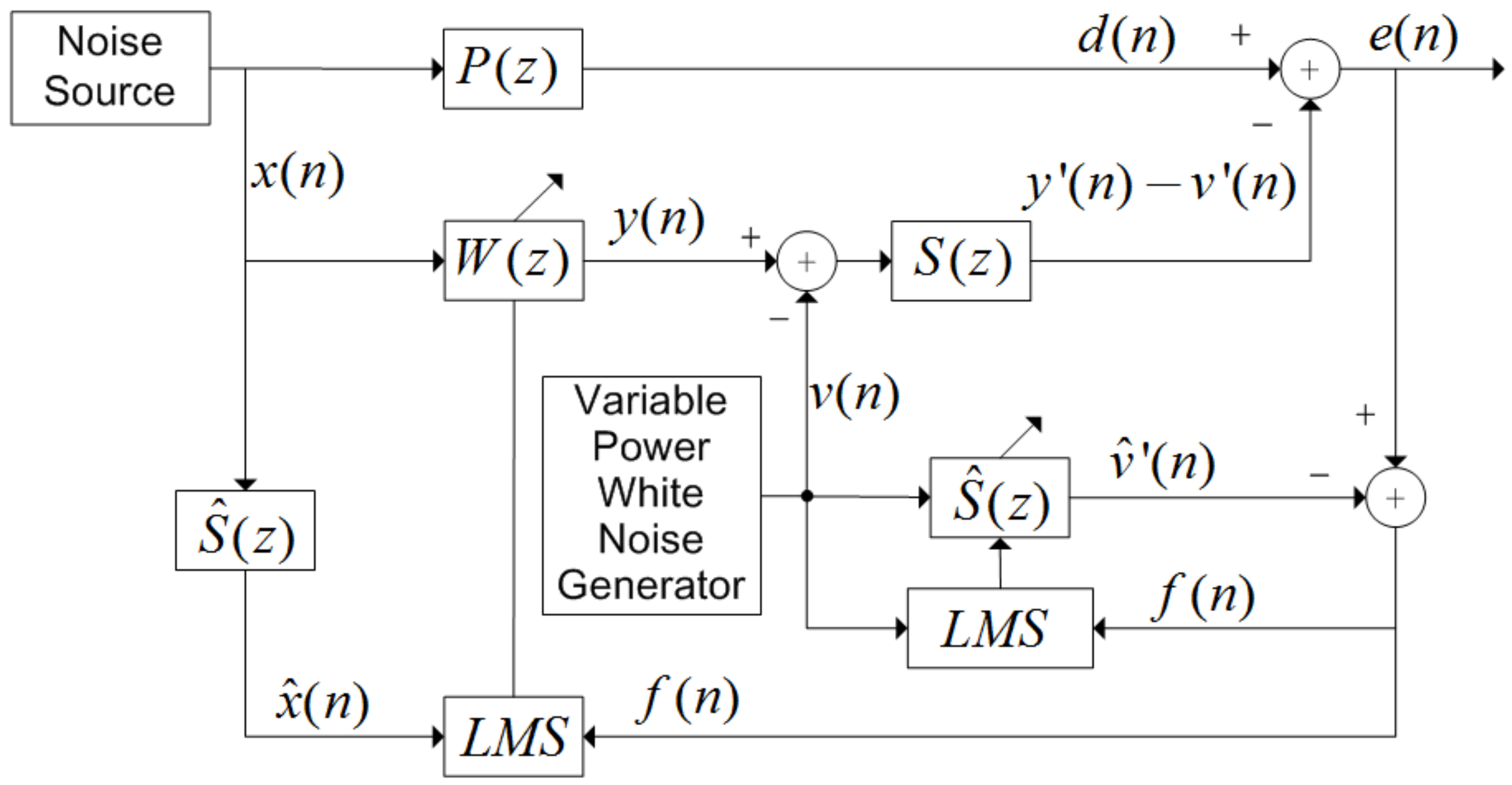
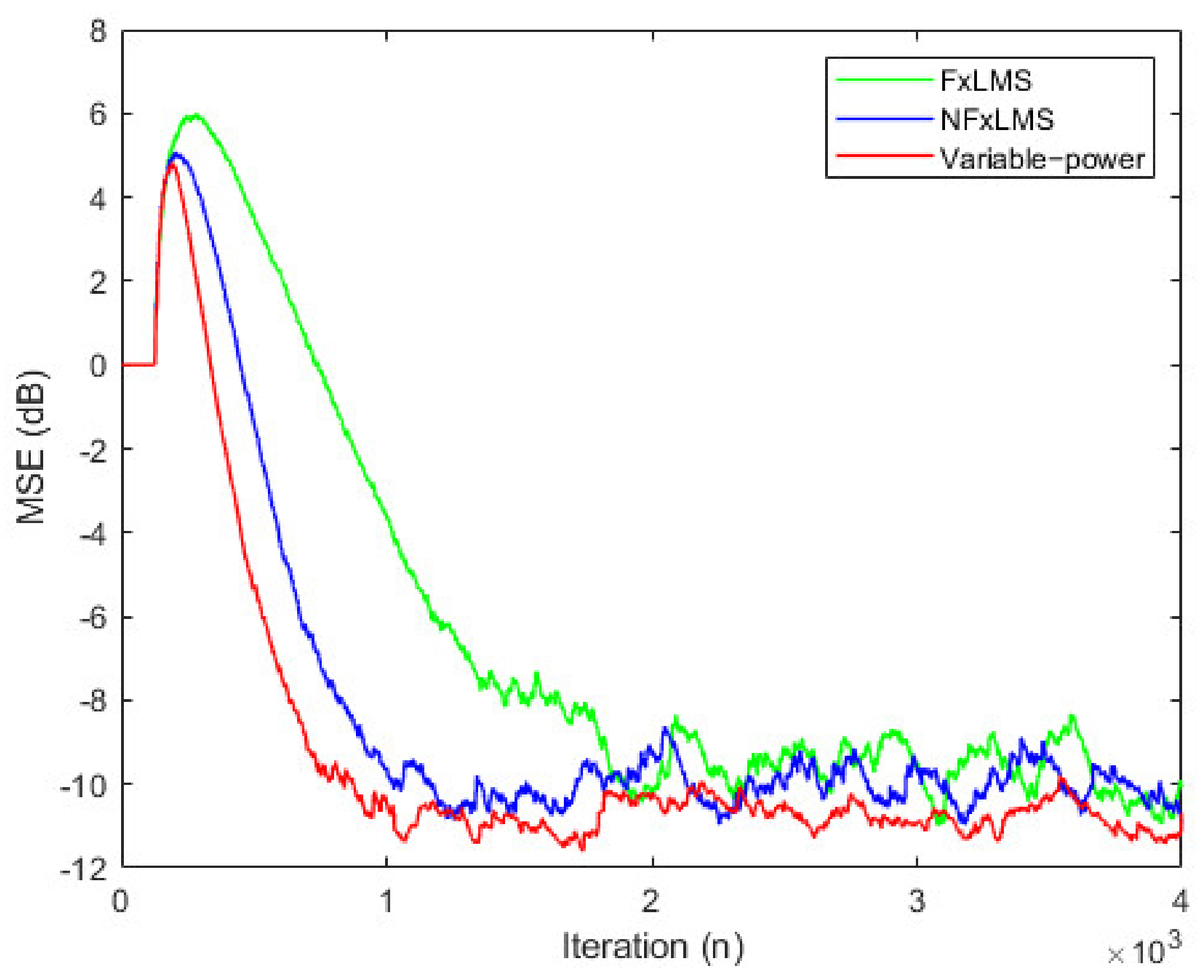
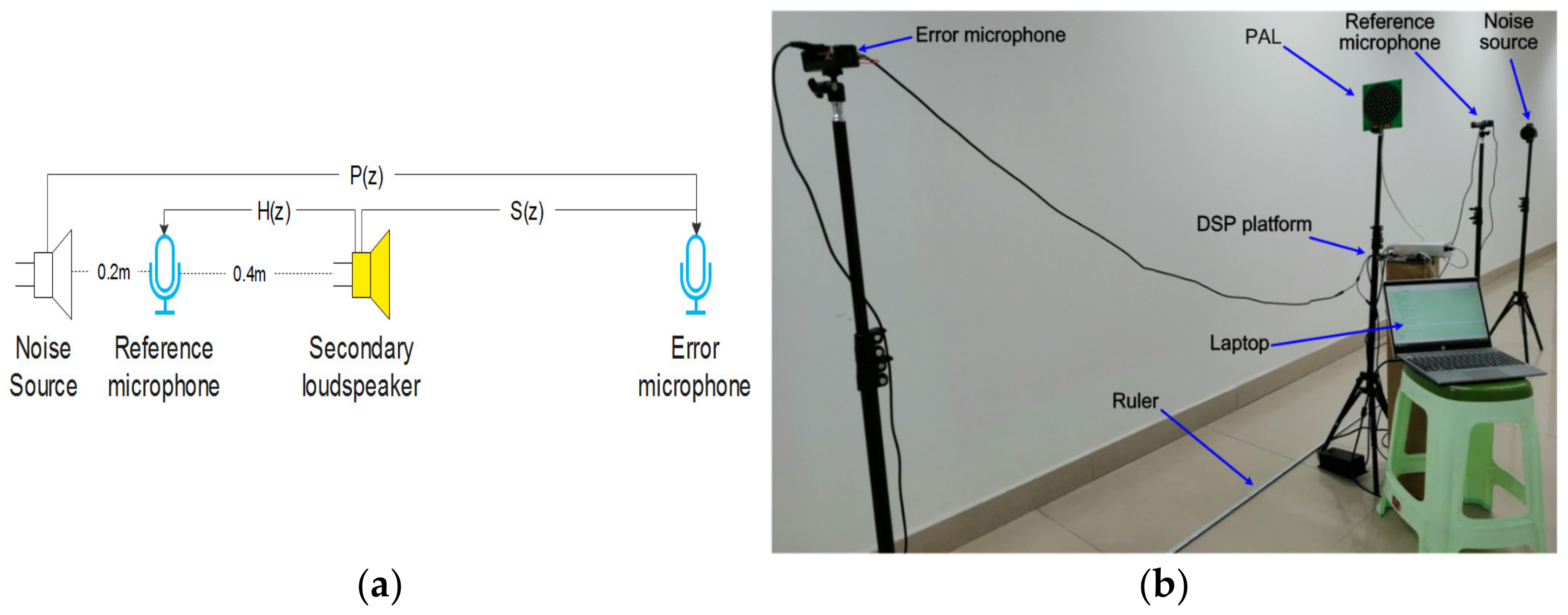
2.1. Online Secondary Path Modeling
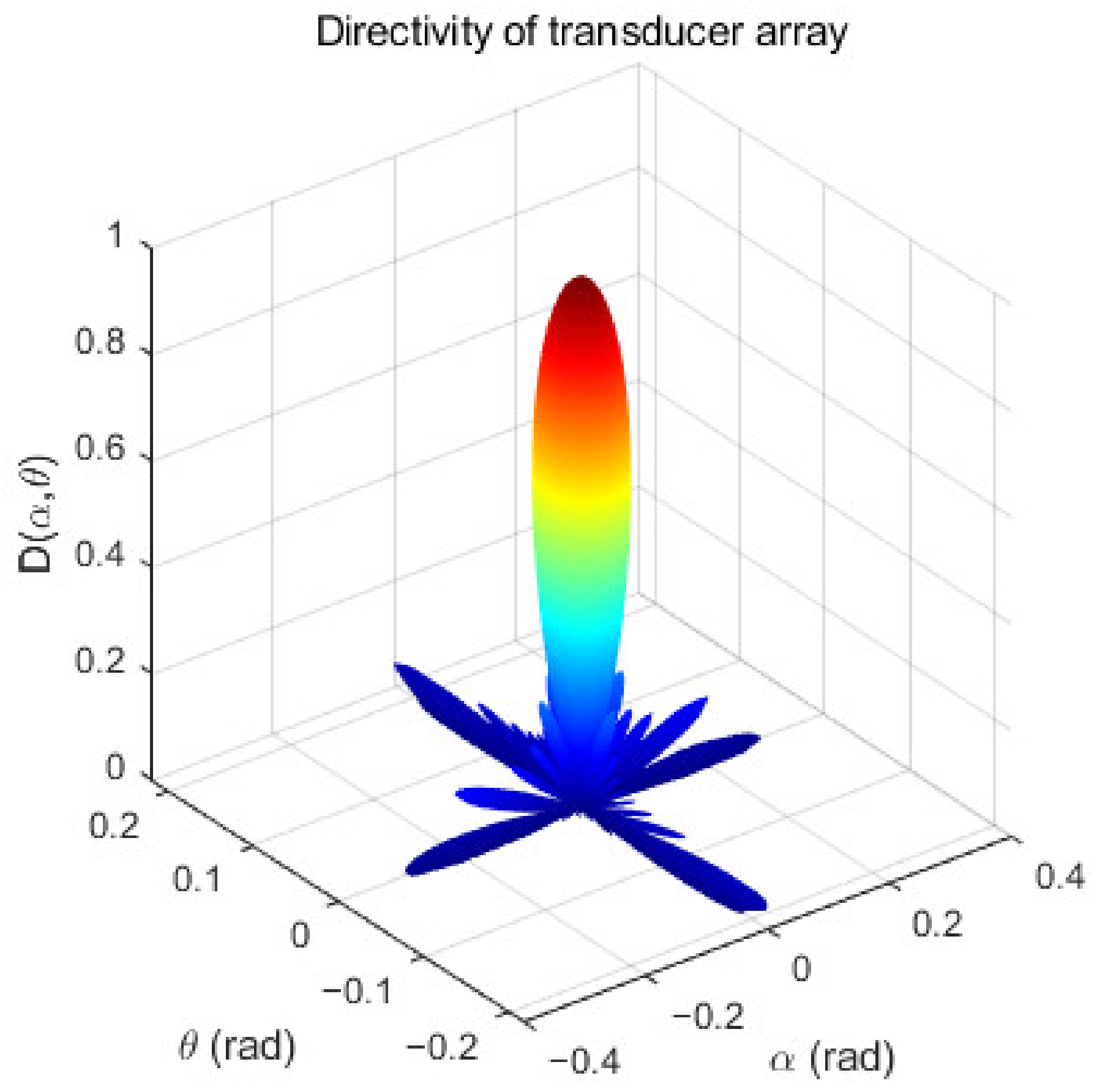
2.2. Theoretical Basis of Parametric Array
3. Noise Control Using Adjustable PAL
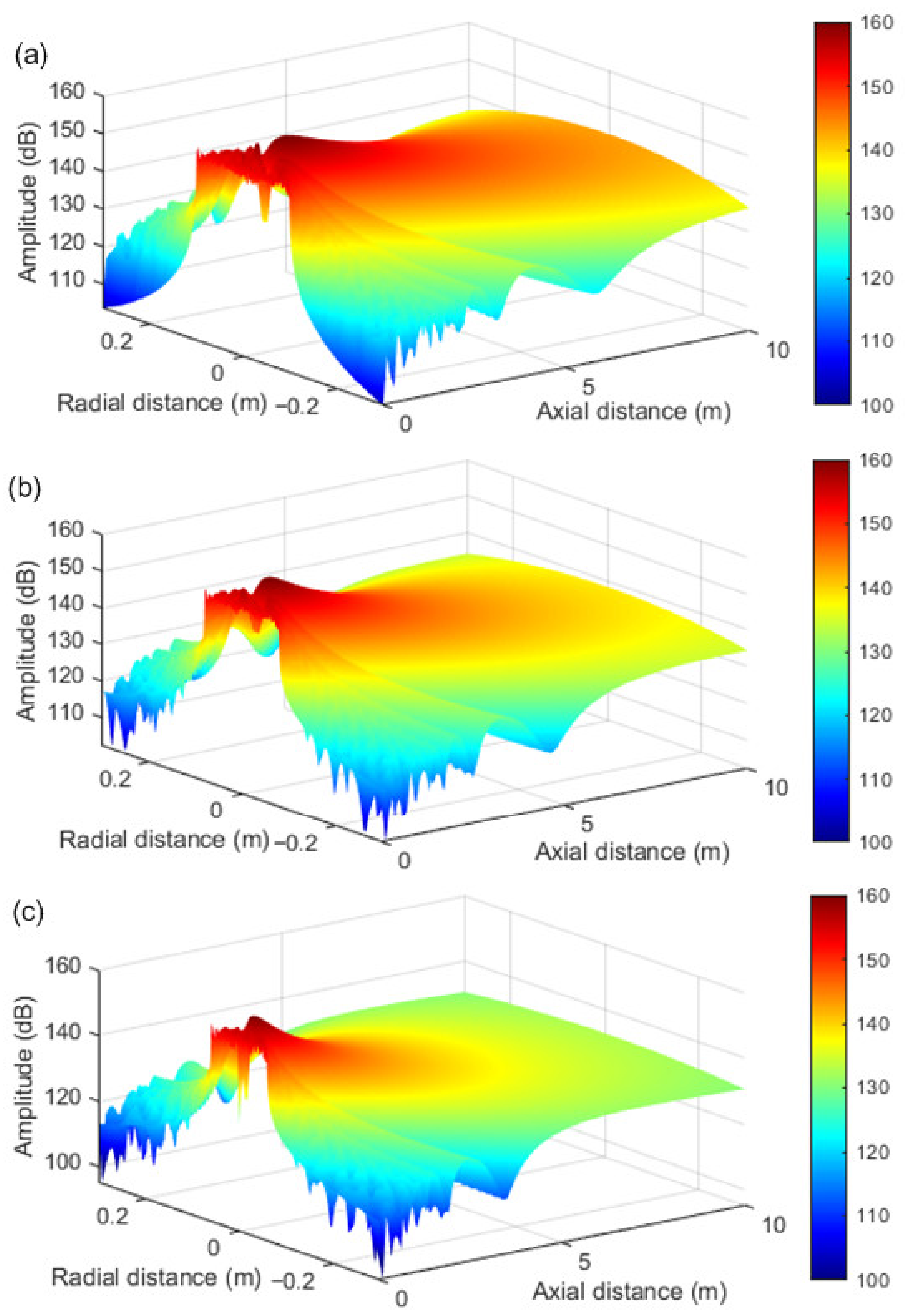
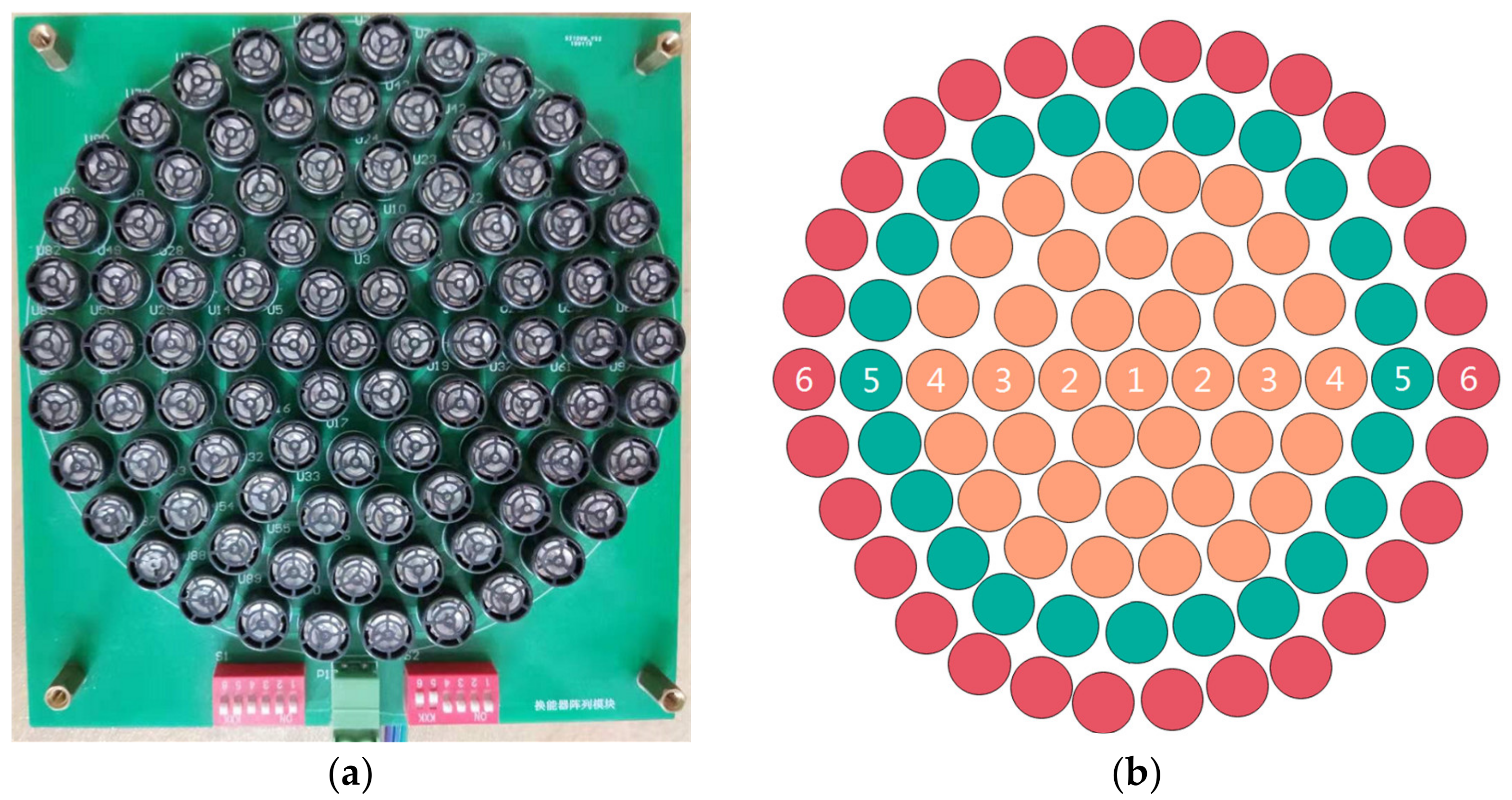
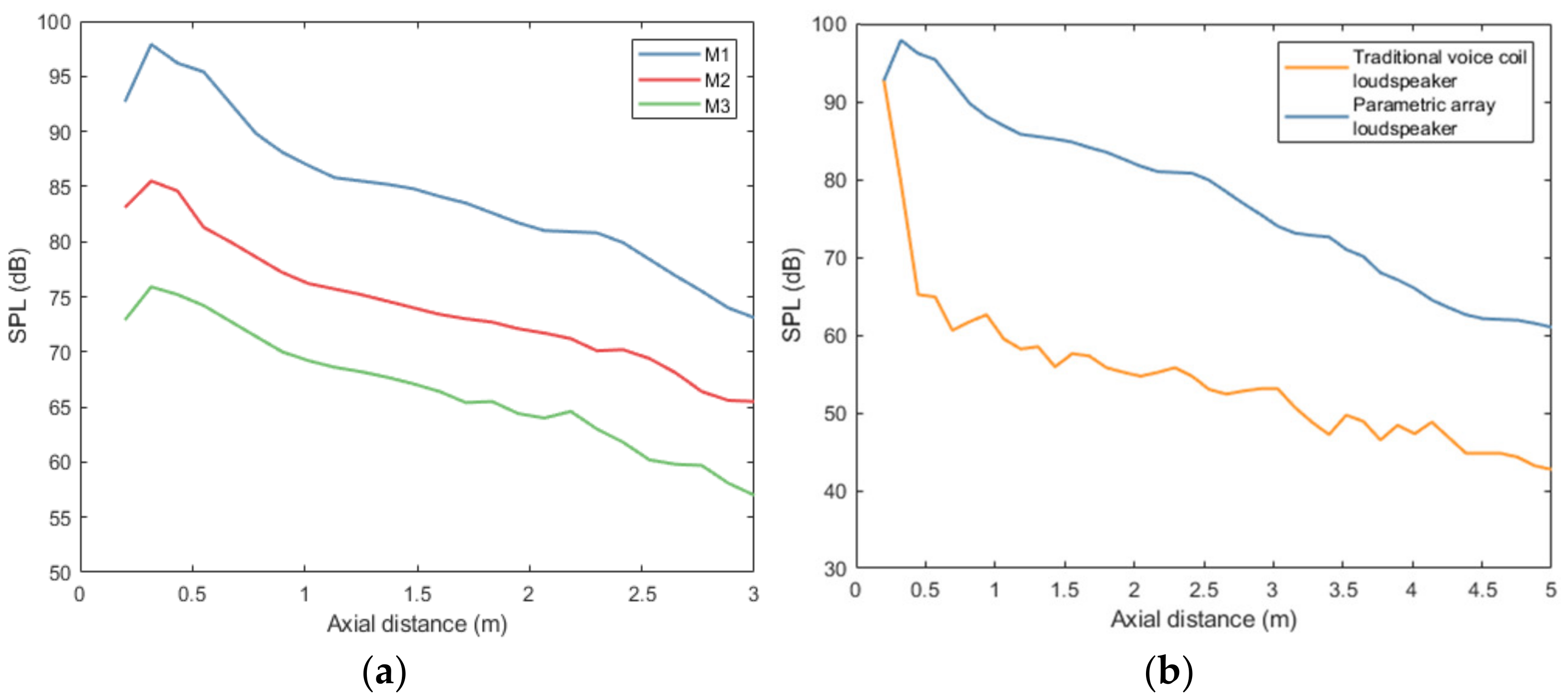
3.1. Sound Field Distribution of PAL
3.2. Adaptive Adjustment of Noise Reduction Target Distance
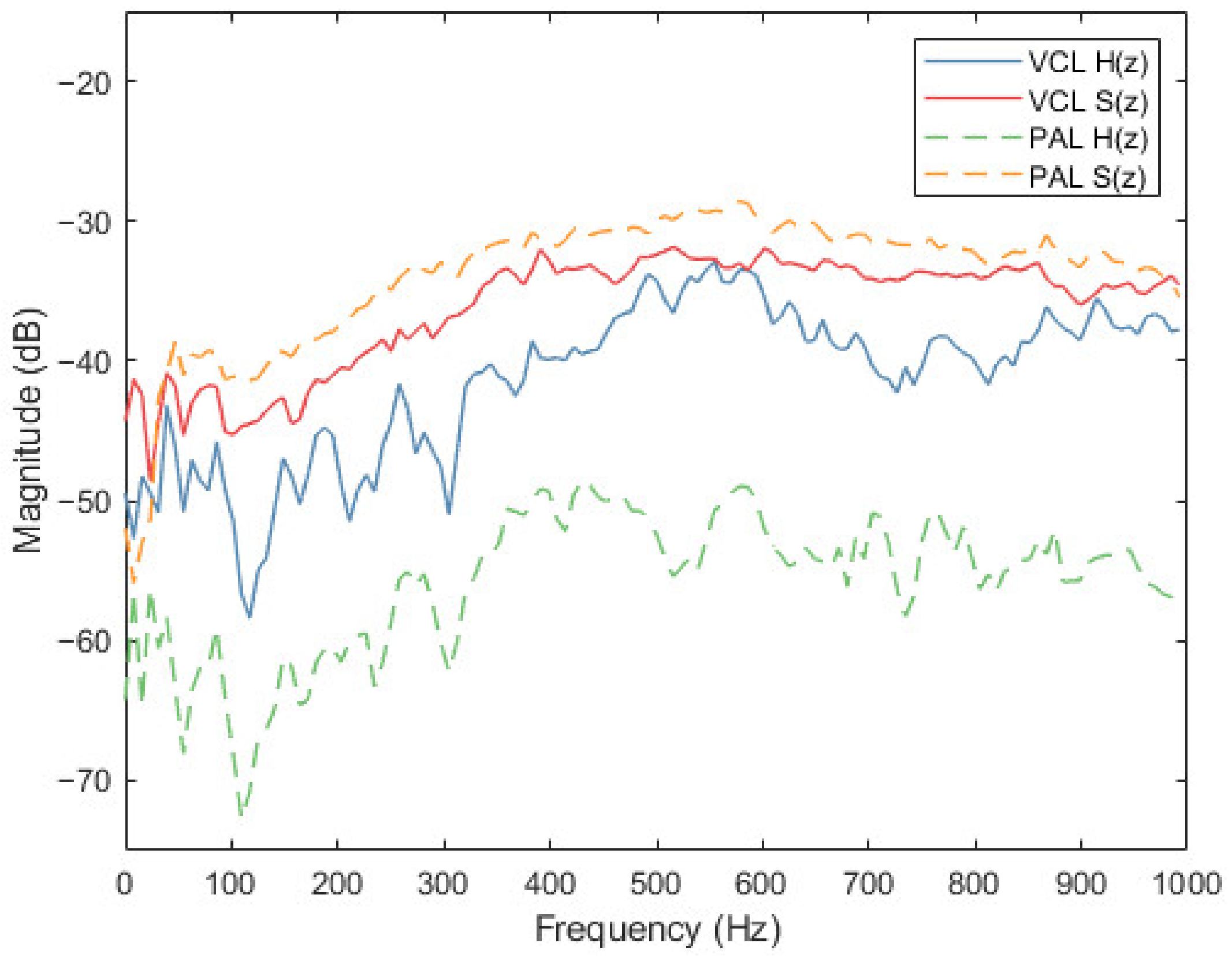
3.3. Acoustic Feedback of Traditional VCL and PAL
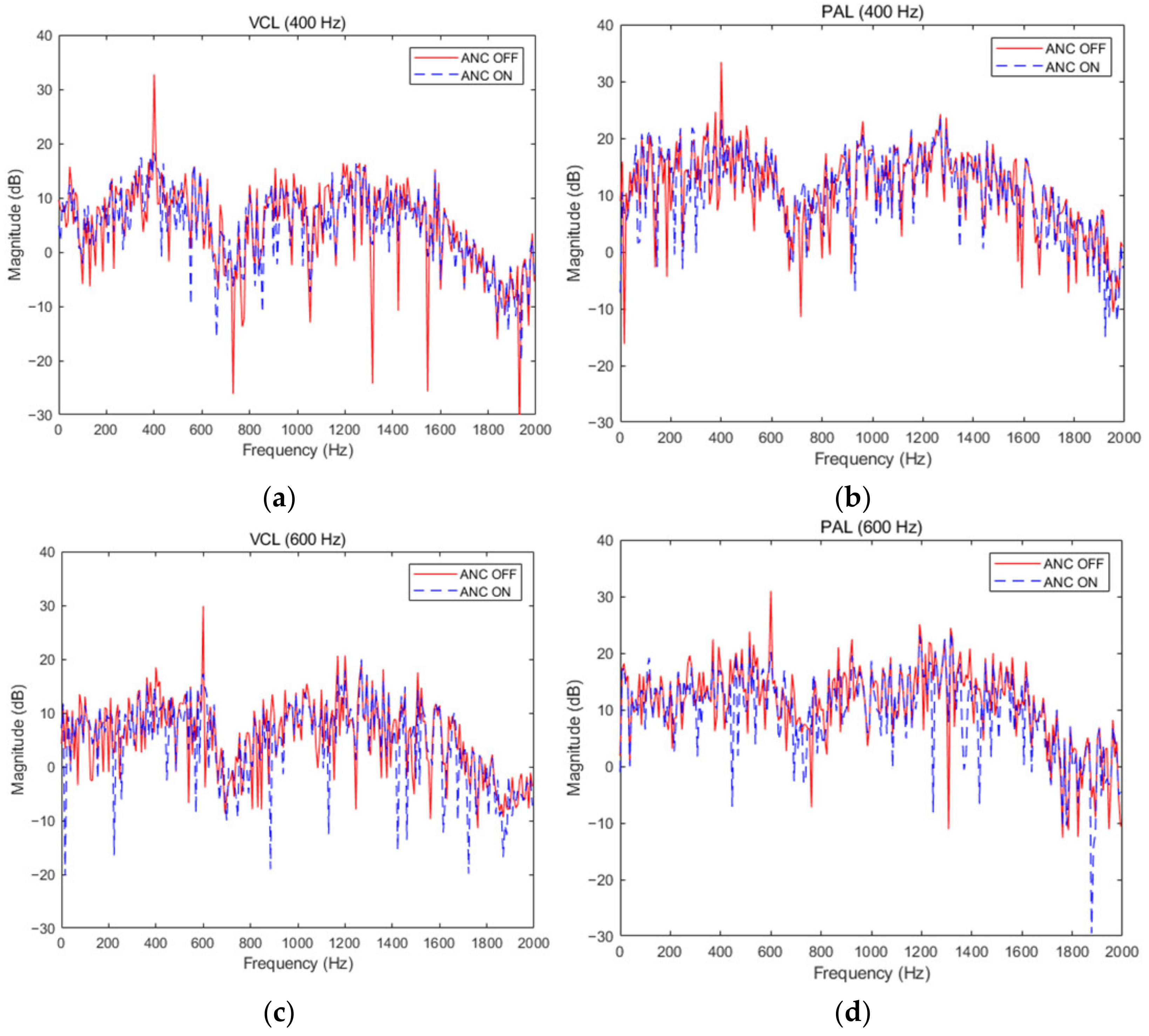
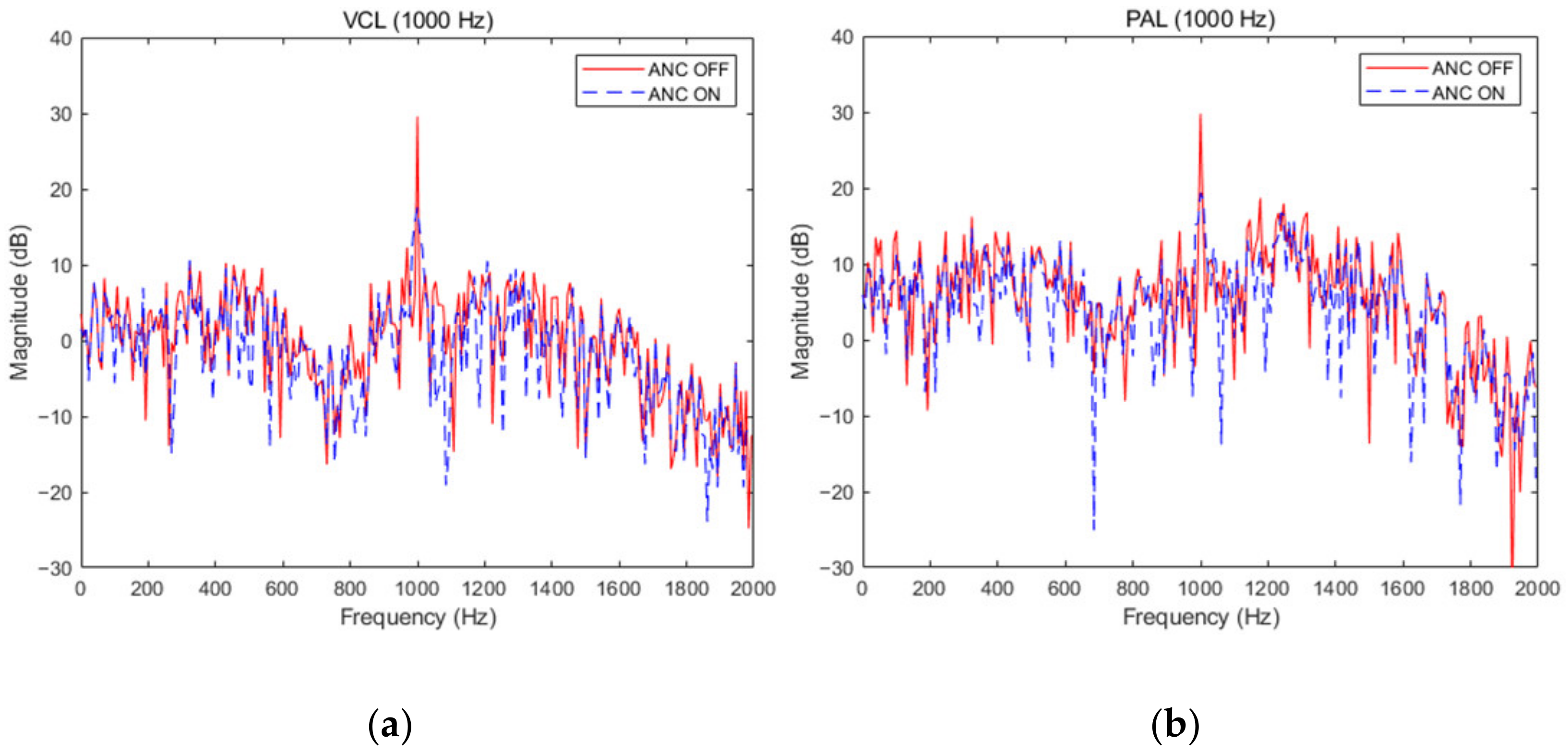
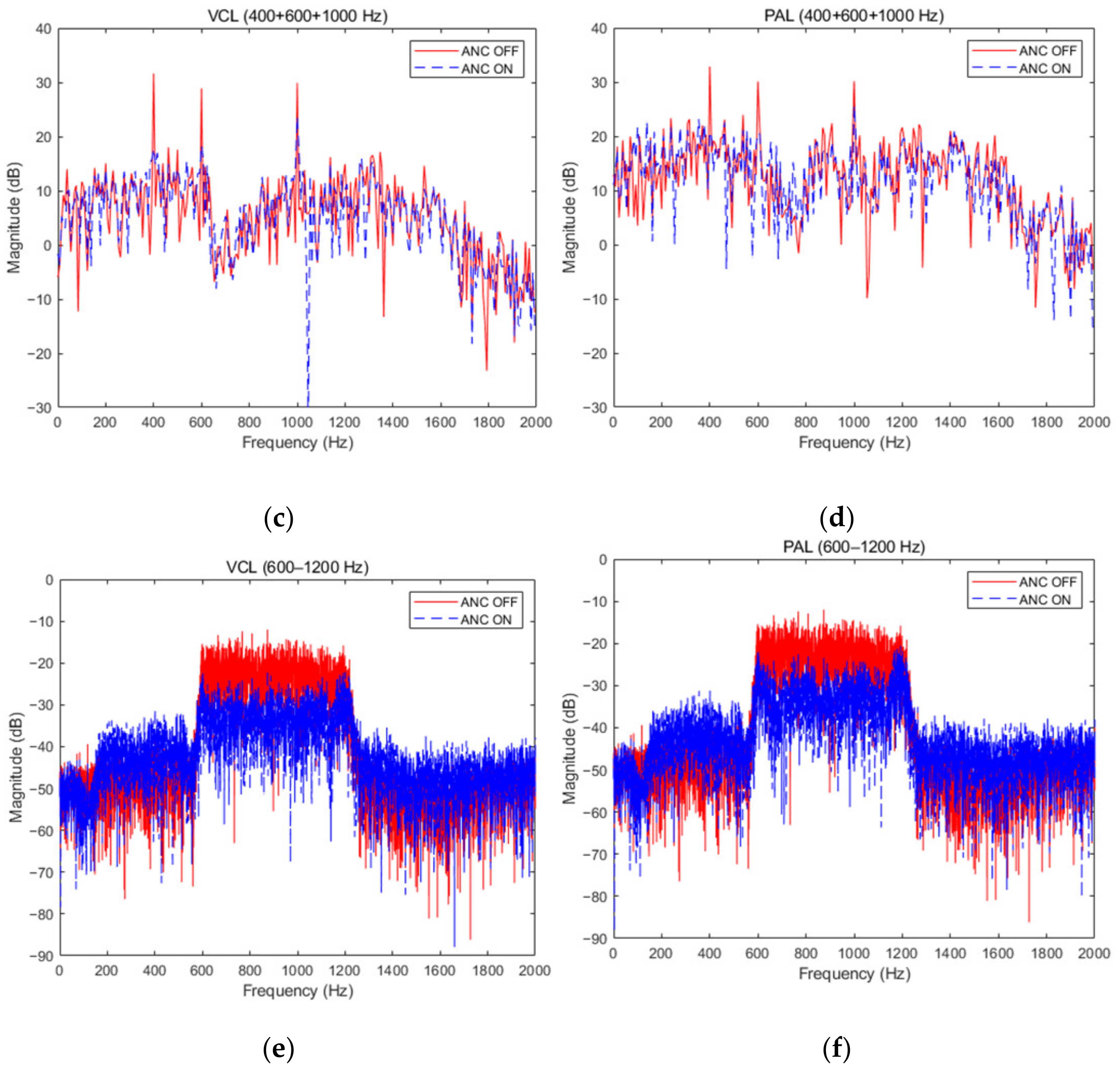
3.4. Noise Reduction Performance of Traditional VCL and PAL
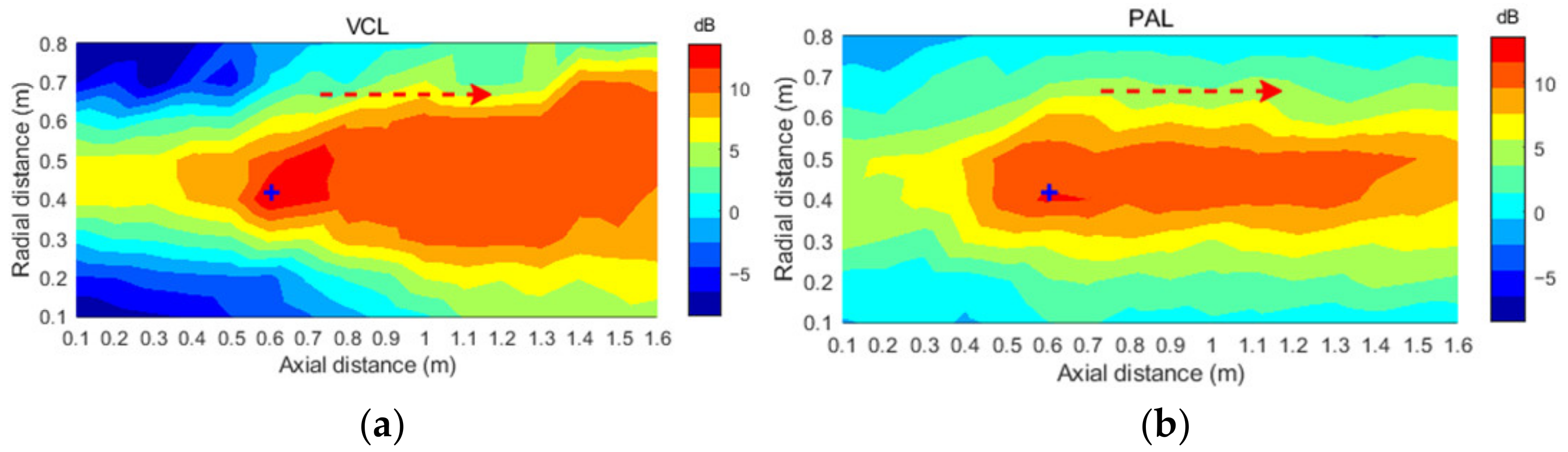
3.5. The Distribution of Noise Reduction Area
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wouters, N.L.; Kaanen, C.I.; den Ouden, P.J.; Schilthuis, H.; Bohringer, S.; Sorgdrager, B.; Ajayi, R.; de Laat, J. Noise Exposure and Hearing Loss among Brewery Workers in Lagos, Nigeria. Int. J. Environ. Res. Public Health 2020, 17, 2880. [Google Scholar] [CrossRef] [PubMed]
- Trieu, B.L.; Nguyen, T.L.; Hiraguri, Y.; Morinaga, M.; Morihara, T. How Does a Community Respond to Changes in Aircraft Noise? A Comparison of Two Surveys Conducted 11 Years Apart in Ho Chi Minh City. Int. J. Environ. Res. Public Health 2021, 18, 4307. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.M.; Hua, Y.T.; Wang, Z.M.; Lim, K.M.; Lee, H.P. A review of the application of active noise control technologies on windows: Challenges and limitations. Appl. Acoust. 2021, 174, 7. [Google Scholar] [CrossRef]
- Zhang, J.H.; Abhayapala, T.D.; Zhang, W.; Samarasinghe, P.N.; Jiang, S.D. Active Noise Control Over Space: A Wave Domain Approach. IEEE-ACM Trans. Audio Speech Lang. 2018, 26, 774–786. [Google Scholar] [CrossRef] [Green Version]
- Chu, Y.J.; Mak, C.M.; Zhao, Y.; Chan, S.C.; Wu, M. Performance analysis of a diffusion control method for ANC systems and the network design. J. Sound Vib. 2020, 475, 17. [Google Scholar] [CrossRef]
- Hirose, S.; Kajikawa, Y.; IEEE. Effectiveness of Headrest ANC System with Virtual Sensing Technique for Factory Noise. In Proceedings of the 2017 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, Aloft Kuala Lumpur Sentral, Kuala Lumpur, Malaysia, 12–15 December 2017; IEEE: New York, NY, USA, 2017; pp. 464–468. [Google Scholar]
- Yang, F.R.; Guo, J.F.; Yang, J. Stochastic Analysis of the Filtered-x LMS Algorithm for Active Noise Control. IEEE-ACM Trans. Audio Speech Lang. 2020, 28, 2252–2266. [Google Scholar] [CrossRef]
- Burgess, J.C. Active adaptive sound control in a duct—A computer-simulation. J. Acoust. Soc. Am. 1981, 70, 715–726. [Google Scholar] [CrossRef]
- Eriksson, L.J.; Allie, M.C. Use of random noise for online transducer modeling in an adaptive active attenuation system. J. Acoust. Soc. Am. 1989, 85, 797–802. [Google Scholar] [CrossRef] [Green Version]
- Akhtar, M.T.; Abe, M.; Kawamata, M. A new variable step size LMS algorithm-based method for improved online secondary path modeling in active noise control systems. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 720–726. [Google Scholar] [CrossRef] [Green Version]
- Carini, A.; Malatini, S. Optimal variable step-size NLMS algorithms with auxiliary noise power scheduling for feedforward active noise control. Ieee Trans. Audio Speech Lang. Process. 2008, 16, 1383–1395. [Google Scholar] [CrossRef]
- Ahmed, S.; Akhtar, M.T.; Zhang, X. Robust Auxiliary-Noise-Power Scheduling in Active Noise Control Systems With Online Secondary Path Modeling. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 13. [Google Scholar] [CrossRef]
- Aslam, M.S.; Raja, M.A.Z. A new adaptive strategy to improve online secondary path modeling in active noise control systems using fractional signal processing approach. Signal Process. 2015, 107, 433–443. [Google Scholar] [CrossRef]
- Elliott, S.J.; Boucher, C.C.; Nelson, P.A. The behavior of a multiple channel active control-system. IEEE Trans. Signal Process. 1992, 40, 1041–1052. [Google Scholar] [CrossRef]
- Aslan, F.; Paurobally, R. Modelling and simulation of active noise control in a small room. J. Vib. Control 2018, 24, 607–618. [Google Scholar] [CrossRef]
- Elliott, S.J.; Jones, M. An active headrest for personal audio. J. Acoust. Soc. Am. 2006, 119, 2702–2709. [Google Scholar] [CrossRef]
- Liu, N.N.; Sun, Y.D.; Wang, Y.S.; Sun, P.; Li, W.W.; Guo, H. Mechanism of interior noise generation in high-speed vehicle based on anti-noise operational transfer path analysis. Proc. Inst. Mech. Eng. Part D -J. Automob. Eng. 2021, 235, 273–287. [Google Scholar] [CrossRef]
- Aslam, M.S.; Shi, P.; Lim, C.C. Self-adapting variable step size strategies for active noise control systems with acoustic feedback. Automatica 2021, 123, 9. [Google Scholar] [CrossRef]
- Ahmed, S.; Akhtar, M.T. Gain Scheduling of Auxiliary Noise and Variable Step-Size for Online Acoustic Feedback Cancellation in Narrow-Band Active Noise Control Systems. IEEE-ACM Trans. Audio Speech Lang. 2017, 25, 333–343. [Google Scholar] [CrossRef]
- Komatsuzaki, T.; Iwata, Y. Active Noise Control Using High-Directional Parametric Loudspeaker. J. Environ. Eng. 2011, 6, 140–149. [Google Scholar] [CrossRef] [Green Version]
- Shi, C.; Kajikawa, Y.; Gan, W.S. An overview of directivity control methods of the parametric array loudspeaker. APSIPA Trans Sig. Inf. Process. 2014, 3, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, K.; Shi, C.; Kajikawa, Y. Multi-channel Active Noise Control Using Parametric Array Loudspeakers. In Proceedings of the 2014 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, Angkor, Cambodia, 9–12 December 2014; IEEE: New York, NY, USA, 2014; pp. 1–6. [Google Scholar]
- Brooks, L.A.; Zander, A.C.; Hansen, C.H. Investigation into the Feasibility of Using a Parametric Array Control Source in an Active Noise Control System. In Proceedings of the ACOUSTICS 2005, Busselton, WA, Australia, 9–11 November 2005; pp. 39–45. [Google Scholar]
- Kidner, M.; Petersen, C.; Zander, A.C.; Hansen, C.H. Feasibility Study of Localised Active Noise Control Using an Audio Spotlight and Virtual Sensors. In Proceedings of the ACOUSTICS 2006, Christchurch, New Zealand, 20–22 November 2006; pp. 55–61. [Google Scholar]
- Tanaka, K.; Shi, C.; Kajikawa, Y. Study on Active Noise Control System Using Parametric Array Loudspeakers. In Proceedings of the 7th Forum Acusticum, Krakow, Poland, 7–12 September 2014. [Google Scholar]
- Ganguly, A.; Vemuri, H.K.; Panahi, I. Real-Time Remote Cancellation of Multi-Tones in an Extended Acoustic Cavity Using Directional Ultrasonic Loudspeaker. In Proceedings of the Iecon 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; IEEE: New York, NY, USA, 2014; pp. 2445–2450. [Google Scholar] [CrossRef]
- Tanaka, K.; Shi, C.; Kajikawa, Y. Binaural active noise control using parametric array loudspeakers. Appl. Acoust. 2017, 116, 170–176. [Google Scholar] [CrossRef]
- Akhtar, M.T.; Abe, M.; Kawamata, M. Noise power scheduling in active noise control systems with online secondary path modeling. IEICE Electron. Express 2007, 4, 66–71. [Google Scholar] [CrossRef] [Green Version]
- Zabolotskaya, E.A.; Khokhlov, R.V. Quasi-Plane waves in nonlinear acoustics of cofined beams. Soviet Physics Acoust. -Ussr 1969, 15, 35–40. [Google Scholar]
- Kuznetsov, V.P. Equations of nonlinear acoustics. Sov. Phys. Acoust. -Ussr 1971, 16, 467–470. [Google Scholar]
- Hamilton, M.F.; Blackstock, D.T. Nonlinear Acoustics: Theory and Applications; Academic Press: Washington, DC, USA, 1997. [Google Scholar]
- Liauh, C.T.; Lin, W.L. Fast numerical scheme of computing acoustic pressure fields for planar circular ultrasound transducers. J. Acoust. Soc. Am. 1999, 105, 2243–2247. [Google Scholar] [CrossRef]
- Westervelt, P.J. Parametric acoustic array. J. Acoust. Soc. Am. 1963, 35, 535–537. [Google Scholar] [CrossRef]
- Rahim, K.A.A.; Jewaratnam, J.; Hassan, C.R.C.; Hamid, M.D. Effectiveness of a Novel Index System in Preventing Early Hearing Loss among Furniture Industry Skills Training Students in Malaysia. Int. J. Environ. Res. Public Health 2020, 17, 16. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zheng, W. A Noise Control Method Using Adaptive Adjustable Parametric Array Loudspeaker to Eliminate Environmental Noise in Real Time. Int. J. Environ. Res. Public Health 2022, 19, 269. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph19010269
Li Y, Zheng W. A Noise Control Method Using Adaptive Adjustable Parametric Array Loudspeaker to Eliminate Environmental Noise in Real Time. International Journal of Environmental Research and Public Health. 2022; 19(1):269. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph19010269
Chicago/Turabian StyleLi, Yinsheng, and Wei Zheng. 2022. "A Noise Control Method Using Adaptive Adjustable Parametric Array Loudspeaker to Eliminate Environmental Noise in Real Time" International Journal of Environmental Research and Public Health 19, no. 1: 269. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph19010269