
Experimental Comparison of Biofidel Measuring Devices Used for the Validation of Collaborative Robotics Applications

Abstract
:1. Introduction
Literature Review
- Maximise robot accuracy
- Maximise robot dexterity
- Minimise robot weight
- Eliminate pinch points and maximise potential gripping radii
- Maximise robot contact area
- Maximise robot padding thickness
- The collision potential during free impact (unconstrained) depends on the following parameters: effective mass in the collision, velocity at the collision point in the direction of the collision, radius of the colliding robot structure, and damping effects due to material or compliance [11].
- The collision potential during clamping (constrained) depends on the following parameters: acting force due to the active motors in the direction of the collision, velocity at the collision point in the direction of the collision, radius of the colliding robot structure, damping effects due to material or compliance, and maximum stop time (reaction and braking time) [11].
- The relative velocity at the moment of collision;
- The shape, area, and hardness of the contacting part;
- The speed of collision detection;
- The mass of the robot part, and how quickly its movement/force can be braked;
- The software programming of the robot.
- (1)
- Limits of the machine
- (2)
- Lifecycle phases
- (3)
- Personnel involved
- (4)
- Activities carried out
- (5)
- Hazards encountered by the personnel involved
- (6)
- Contact areas on the human body
- (7)
- Injury scale to gauge the severity
2. Materials and Methods
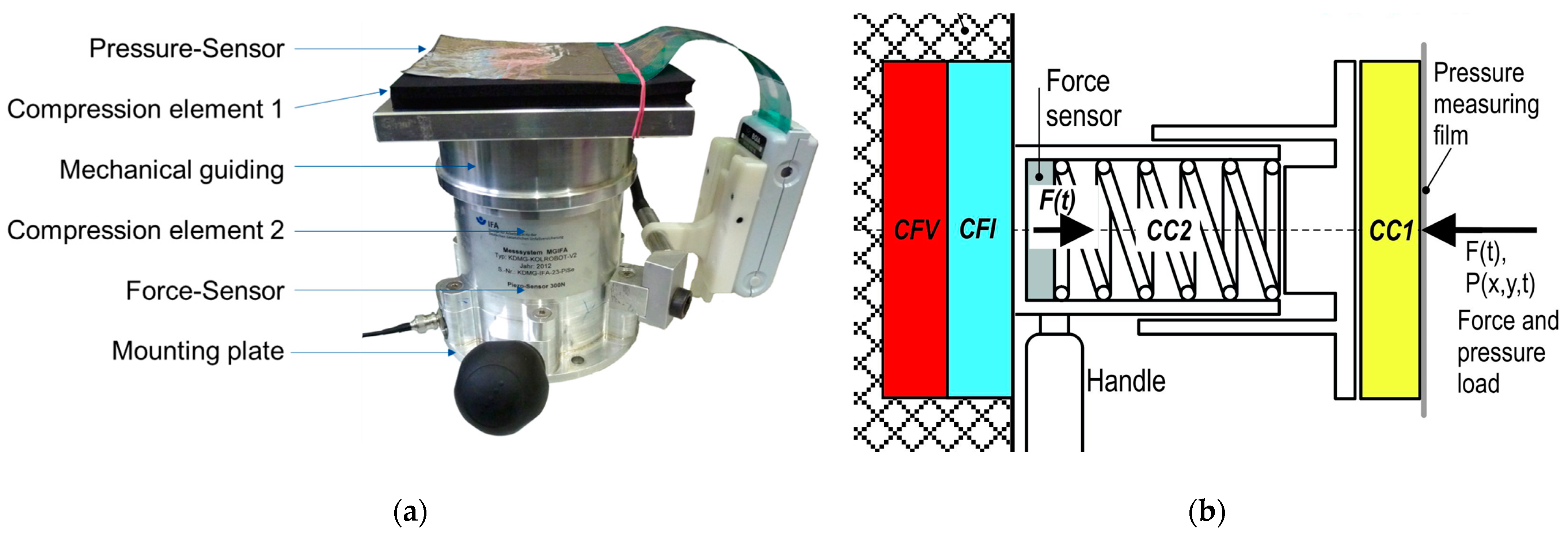
2.1. Description of a Biofidel Measuring Device
2.2. Experimental Equipment
- A test machine (Figure 2a) executes linear quasi-static or dynamic movements of a tappet. The tappet is positioned at a defined distance from the measuring device. Using defined pulses, influences of different device parameters can be obtained.
- A pendulum (Figure 2b) is used to create a short impact to be applied on the measuring device with a defined and limited energy input.
2.2.1. Test Machine
2.2.2. Pendulum
2.3. Experimental Procedure
2.3.1. Analysed Parameters
2.3.2. Concept for a Comparison Protocol
- Comparisons of the different elements:
- ◦
- The compression element 1 (CC1) were compressed up to 400 N with two different tappets. A flat circular tappet with rounded edges and a diameter of 50 mm and a spherical tappet with a radius of 25 mm.
- ◦
- The compression element 2 (CC2) is compressed over the total range of the measuring device so that the spring stiffness can be compared.
- ◦
- Finally, the combined stiffness of CC1 and CC2 was measured with the spherical tappet.
- ◦
- If possible, the weight of the different moving parts (the flywheel mass) should also be measured.
- The dynamic behaviour can be recorded with the test machine. For this, the static value of 200 N was chosen as a reference point, and the starting point was placed 10 mm in front of it, as described earlier. Then, curves with different velocities were used to compare the peak forces and oscillation behaviour.
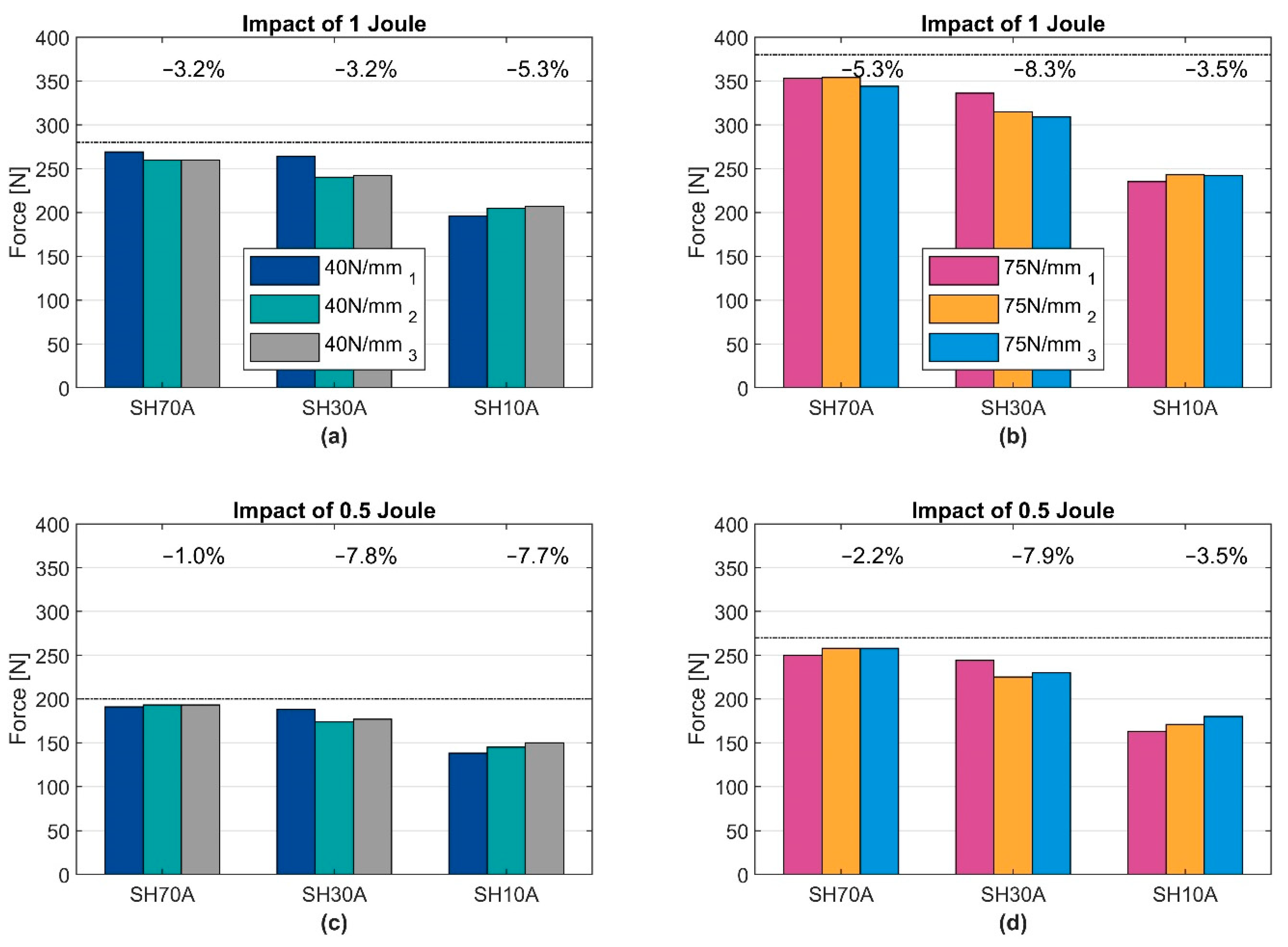
- For the final test, the pendulum was used. Different load levels were used to enable a comparison of the different devices in combination with the corresponding elements. Each setting was repeated 5 times and the mean value was determined.
3. Results and Discussion
3.1. Parameters Identified in the Literature
3.2. Comparative Study with the Influence of Different Parameters
3.2.1. Comparison of the Different Elements
3.2.2. Comparison on the Test Machine
3.2.3. Comparison with Pendulum Test
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Aspects of Fixation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| REF | Fixed | Number of Supporting Springs | ||||
|---|---|---|---|---|---|---|
| 12x | 9x | 6x | 3x | |||
| Test Machine | ||||||
| Q-point 1 on 45 N/mm springs | 200 N (static) | 205 N (dyn.) | −2.4% | −2.9% | −3.4% | −10.7% |
| Q-point 1 on 100 N/mm springs | 200 N (static) | 211 N (dyn.) | −1.6% | −1.9% | −4.7% | −18.7% |
| Q-point 2 on 45 N/mm springs | 300 N (static) | 321 N (dyn.) | −7.6% | −8.1% | −9.5% | −15.2% |
| Q-point 2 on 100 N/mm springs | 300 N (static) | 314 N (dyn.) | −5.1% | −6.4% | −9.2% | −18.2% |
| Pendulum | ||||||
| Q-point 1 on 45 N/mm springs | 1 joule | 268 N (dyn.) | −0.7% | −1.1% | −1.5% | −6.3% |
| Q-point 2 on 45 N/mm springs | 1 joule | 357 N (dyn.) | −3.1% | −3.6% | −5.9% | −18.2% |
Appendix B. Flywheel Mass
| Extra Mass | Q-Point 1 | Q-Point 2 |
|---|---|---|
| Normal | 277 N | 369 N |
| +0.5 kg | −1.0% | −2.3% |
| +1 kg | −4.8% | −3.4% |
| +1.5 kg | −4.9% | −6.3% |
| +2 kg | −8.0% | −10.0% |
| +2.5 kg | −9.6% | −10.4% |
References
- Behrens, R. Biomechanische Grenzwerte für die Sichere Mensch-Roboter-Kollaboration, 1st ed.; Springer Vieweg: Wiesbaden, Germany, 2019; Volume XXXII, p. 334. [Google Scholar] [CrossRef]
- Behrens , R.; Behrens, R.; Pliske, G.; Umbreit, M.; Piatek, S.; Walcher, F.; Elkmann, N. A Statistical Model to Determine Biomechanical Limits for Physically Safe Interactions with Collaborative Robots. Front. Robot. AI 2022, 8, 667818. [Google Scholar] [CrossRef] [PubMed]
- Melia, M.; Geissler, B.; König, J.; Ottersbach, H.J.; Umbreit, M.; Letzel, S.; Muttray, A. Pressure pain thresholds: Subject factors and the meaning of peak pressures. Eur. J. Pain 2019, 23, 167–182. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muttray, A.; Melia, M.; Geißler, B.; König, J.; Letzel, S. Wissenschaftlicher Schlussbericht zum Vorhaben FP-0317: “Kollaborierende Roboter—Ermittlung der Schmerzempfindlichkeit an der Mensch-Maschine-Schnittstelle”; Universitätsmedizin der Johannes Gutenberg Universität Mainz: Mainz, Germany, 2014. [Google Scholar]
- ISO/TS 15066:2016; Robots and Robotic Devices—Collaborative Robots. Beuth-Verlag: Berlin, Germany, 2017. [CrossRef]
- ISO 10218-2:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. Beuth-Verlag: Berlin, Germany, 2012. [CrossRef]
- Huelke, M.; Ottersbach, H. How to approve collaborating robots—The IFA force pressure measurement system. In Proceedings of the 7th International Conference on Safety of Industrial Automation Systems—SIAS, Montreal, QC, Canada, 11–12 October 2012. [Google Scholar]
- Collaborative robot systems-Design of systems with “power and force limiting” function. DGUV Inf. 2017. Issue 08/2017 FB HM-080.
- Ulrich, K.T.; Tuttle, T.T.; Donoghue, J.P.; Townsend, W.T. Intrinsically Safer Robots; NASA Kennedy Space Center: Cambrige, MA, USA, 1995. [Google Scholar]
- Haddadin, S. Towards Safe Robots: Approaching Asimov’s 1st Law, Springer Tracts in Advanced Robotics, XXVI, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 90, p. 350. [Google Scholar] [CrossRef]
- Oberer-Treitz, S. Abschätzung der Kollisionsfolgen von Robotern zur Bewertung des sicheren Einsatzes in der Mensch-Roboter-Kooperation; Stuttgarter Beiträge zur Produktionsforschung; Fraunhofer Verlag: Stuttgart, Germany, 2018; p. 77. [Google Scholar] [CrossRef]
- Oberer-Treitz, S.; Puzik, A.; Verl, A. Sicherheitsbewertung der Mensch-Roboter-Kooperation. In Wt Werkstattstechnik Online; VDI Fachmedien: Düsseldorf, Germany, 2011; pp. 629–632. [Google Scholar]
- HSE. Collision and injury criteria when working with collaborative robots. In Health and Safety Laboratory for the Health and Safety Executive: Research Report RR906; HSE: Buxton, UK, 2012. [Google Scholar]
- Mansfeld, N.; Hamad, M.; Becker, M.; Marin, A.G.; Haddadin, S. Safety map: A unified representation for biomechanics impact data and robot instantaneous dynamic properties. IEEE Robot. Autom. Lett. 2018, 3, 1880–1887. [Google Scholar] [CrossRef] [Green Version]
- Mansfeld, N.; Ott, C.; Haddadin, S. Maximal input limits for independent SISO control in modal space under consideration of actuator constraints. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6721–6728. [Google Scholar]
- Vemula, B.; Matthias, B.; Ahmad, A. A design metric for safety assessment of industrial robot design suitable for power-and force-limited collaborative operation. Int. J. Intell. Robot. Appl. 2018, 2, 226–234. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Matthias, B.; Kock, S.; Jerregard, H.; Kallman, M.; Lundberg, I.; Mellander, R. Safety of collaborative industrial robots: Certification possibilities for a collaborative assembly robot concept. In Proceedings of the 2011 IEEE International Symposium on Assembly and Manufacturing (ISAM), Tampere, Finland, 25–27 May 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Lim, H.-O.; Tanie, K. Human safety mechanisms of human-friendly robots: Passive viscoelastic trunk and passively movable base. Int. J. Robot. Res. 2000, 19, 307–335. [Google Scholar] [CrossRef]
- Khatib, O. Inertial properties in robotic manipulation: An object-level framework. Int. J. Robot. Res. 1995, 14, 19–36. [Google Scholar] [CrossRef]
- Ikuta, K.; Ishii, H.; Nokata, M. Safety Evaluation Method of Design and Control for Human-Care Robots. Int. J. Robot. Res. 2003, 22, 281–297. [Google Scholar] [CrossRef]
- Dagalakis, N.G.; Yoo, J.-M.; Oeste, T. Human-robot collaboration dynamic impact testing and calibration instrument for disposable robot safety artifacts. Ind. Robot. Int. J. 2016, 43, 328–337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kossmann, M. Sicherheit in der Mensch-Roboter-Interaktion durch einen Biofidelen Bewertungsansatz; Technische Universität München: München, Germany, 2019. [Google Scholar]
- Scibilia, A.; Valori, M.; Pedrocchi, N.; Fassi, I.; Herbster, S.; Behrens, R.; Saenz, J.; Magisson, A.; Bidard, C.; Kühnrich, M. Analysis of interlaboratory safety related tests in power and force limited collaborative robots. IEEE Access 2021, 9, 80873–80882. [Google Scholar] [CrossRef]
- Schlotzhauer, A.; Stotz, T.; Awad, R.; Kraus, W. Virtual Validation of Power and Force Limiting Setups in Human-Robot-Collaboration. Procedia CIRP 2022, 107, 845–850. [Google Scholar] [CrossRef]
- Schlotzhauer, A.; Kaiser, L.; Wachter, J.; Brandstötter, M.; Hofbaur, M. On the trustability of the safety measures of collaborative robots: 2D Collision-force-map of a sensitive manipulator for safe HRC. In Proceedings of the 2019 IEEE 15th international conference on automation science and engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 1676–1683. [Google Scholar] [CrossRef]
- Ottersbach, H.J. BG/BGIA Risk Assessment Recommendations according to Machinery Directive—Design of Workplaces with Collaborative Robots; IFA: Sankt Augustin, Germany, 2011. [Google Scholar]
- Han, D.; Park, M.; Choi, J.; Shin, H.; Kim, D.; Rhim, S. Assessment of Pain Onset and Maximum Bearable Pain Thresholds in Physical Contact Situations. Sensors 2022, 22, 2996. [Google Scholar] [CrossRef] [PubMed]
- Behrens, R.; Elkmann, N. Study on meaningful and verified thresholds for minimizing the consequences of human-robot collisions. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3378–3383. [Google Scholar] [CrossRef]
- Fujikawa, T.; Sugiura, R.; Nishikata, R.; Yamada, Y.; Nishimoto, T. Marmarou-type impact tests to investigate criteria for avoiding bruises in extremities by human-robot contact. In Proceedings of the 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Tokoname, Japan, 4–6 March 2021; pp. 297–300. [Google Scholar] [CrossRef]
- Saenz, J.; Aske, L.; Bidard, C.; Buurke, J.; Nielsen, K.; Schaake, L.; Vicentini, F. COVR-Towards simplified evaluation and validation of collaborative robotics applications across a wide range of domains using robot safety skills. In Proceedings of the 9th International Conference on Safety of Industrial Automated Systems (SIAS), Nancy, France, 10–12 October 2018. [Google Scholar]







| Robot Parameters | Measuring Device Parameters |
|---|---|
| Velocity | Stiffness * |
| Effective mass | Effective (flywheel) mass (*) |
| Geometry, shape, area (*) | Filtering (data acquisition) |
| Stiffness, material | Resolution |
| (control) Force | Contact situation |
| Reaction + stopping time | Correction function |
| Inertia | Mounting (*) |
| … 1 | … 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zimmermann, J.; Huelke, M.; Clermont, M. Experimental Comparison of Biofidel Measuring Devices Used for the Validation of Collaborative Robotics Applications. Int. J. Environ. Res. Public Health 2022, 19, 13657. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph192013657
Zimmermann J, Huelke M, Clermont M. Experimental Comparison of Biofidel Measuring Devices Used for the Validation of Collaborative Robotics Applications. International Journal of Environmental Research and Public Health. 2022; 19(20):13657. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph192013657
Chicago/Turabian StyleZimmermann, Jan, Michael Huelke, and Matthias Clermont. 2022. "Experimental Comparison of Biofidel Measuring Devices Used for the Validation of Collaborative Robotics Applications" International Journal of Environmental Research and Public Health 19, no. 20: 13657. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph192013657