2.1. Research Motivation
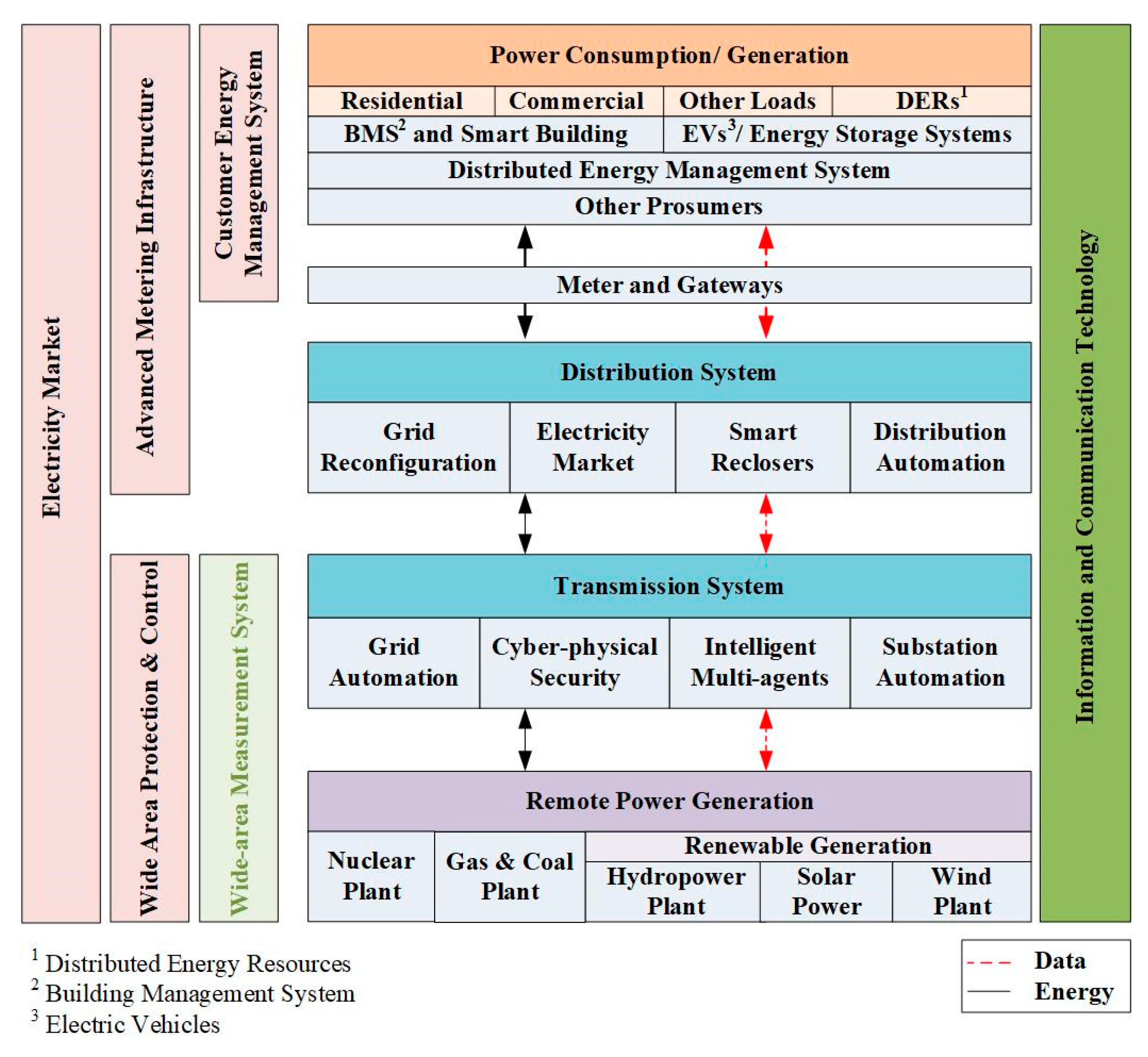
Developing a real-time power system oscillation monitoring framework is an important part of small signal stability studies using WAMS technologies. An overview of Smart Grid components and technologies is shown in
Figure 1. Observe that the smart grid consists of different state-of-the-art technologies enabling effective network management schemes in the presence of renewable energy systems, flexible loads, and energy storage systems. This new concept ultimately offers the efficient and reliable operation of future power systems via a two-way exchange of data and energy among different sectors in the electric power supply chainmn including generation, transmission, distribution, and consumption. Implementation of PMUs and WAMS to achieve a fully observable grid was defined as the first phase of a Smart Grid project [
17,
18].
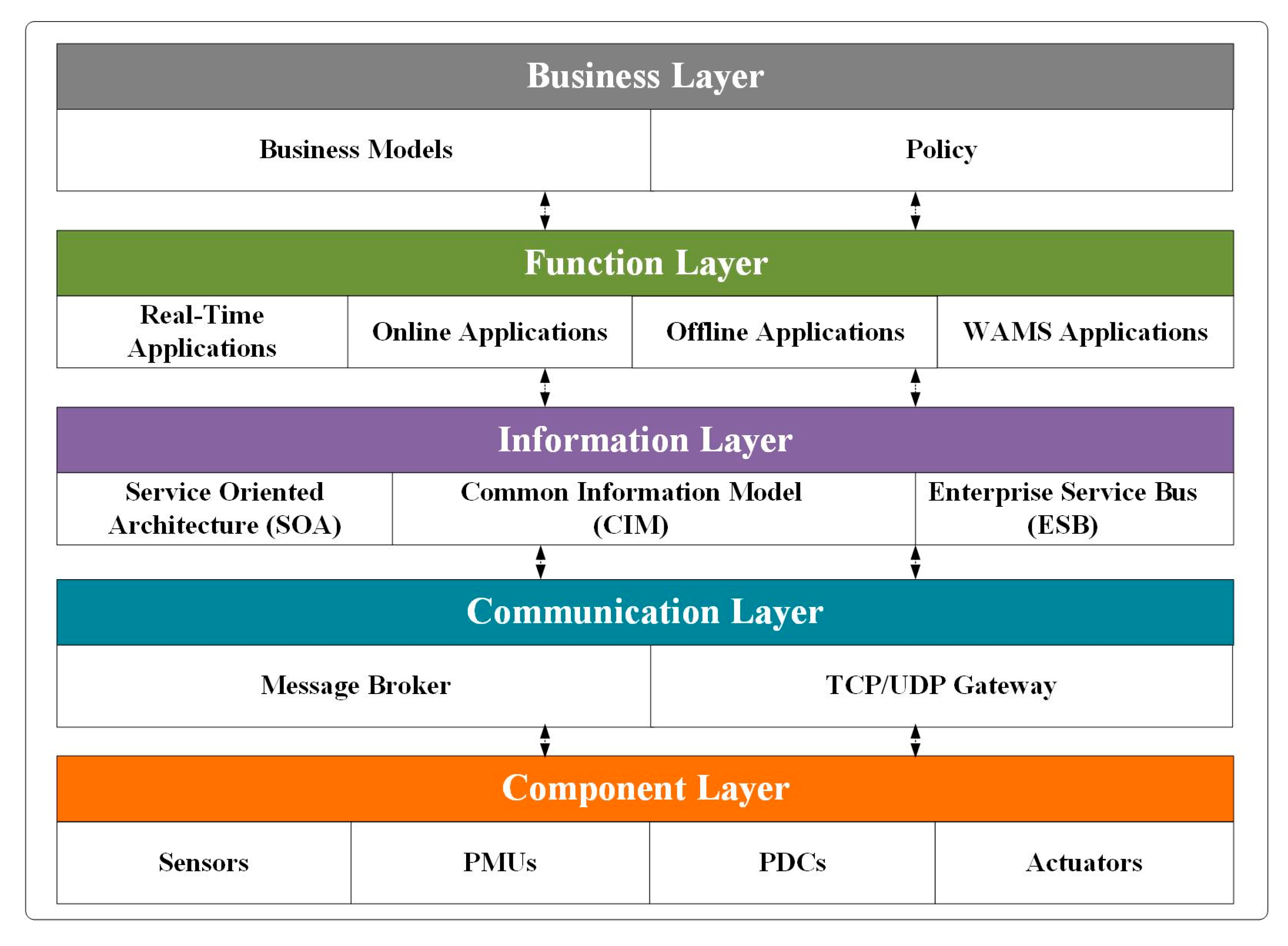
As shown in
Figure 2, WAMS architecture includes five layers. The component layer consists of physical devices. It is responsible for providing data, functions, and communication services for the upper layers. The communication layer applies several methods and protocols to obtain data among various elements in the network. The information layer includes the data model and the communication rules that are used to exchange information. The function layer contains the logical functions or various WAMS applications, independent of the physical architecture; however, it is reliant on the business models and the organization’s policies. Finally, the business layer defines the business models and the policies [
17,
18]
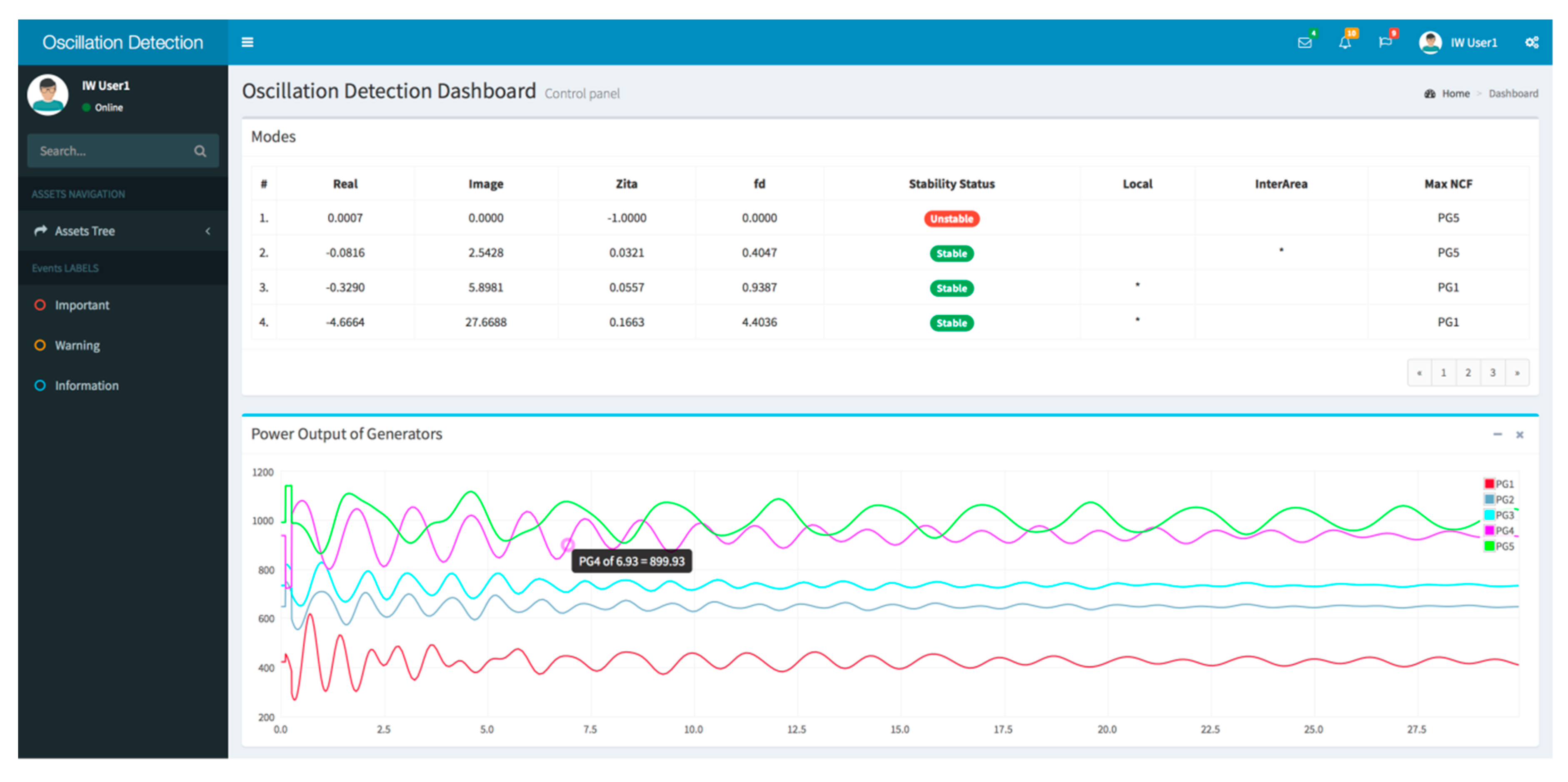
One of the main online applications associated with the proposed WAMS function layer is power system oscillation detection using synchrophasor data, which is the main scope of this paper. The oscillation detection algorithm is detailed in
Section 2.2,
Section 2.3,
Section 2.4 and
Section 2.5.
2.2. Motivation behind Methodology Selection
In many Smart Grid projects, some well-known methods used for power system oscillation detection were analyzed and compared. This has been carried out to identify the best method in terms of: (1) accuracy in the estimation of the oscillatory mode features, (2) simplicity in the implementation, (3) ability to provide visual intuitiveness, (4) skill to determine the most associated state variable to each oscillatory mode, (5) robustness against the noise, and (6) self-verification ability. A survey of the literature showed that the extended Prony methods can be a reasonable choice for the proposed framework. Note that the basic Prony method has some weakness such as its sensitivity to noise and selection of the proper order of the system [
14,
15,
16]. An overestimated order may lead to the generation of extraneous modes by the Prony method. These drawbacks were addressed in some extensions of the Prony method. For example, the study in [
15] proposed a simple criteria for selecting the order of the system. The study in [
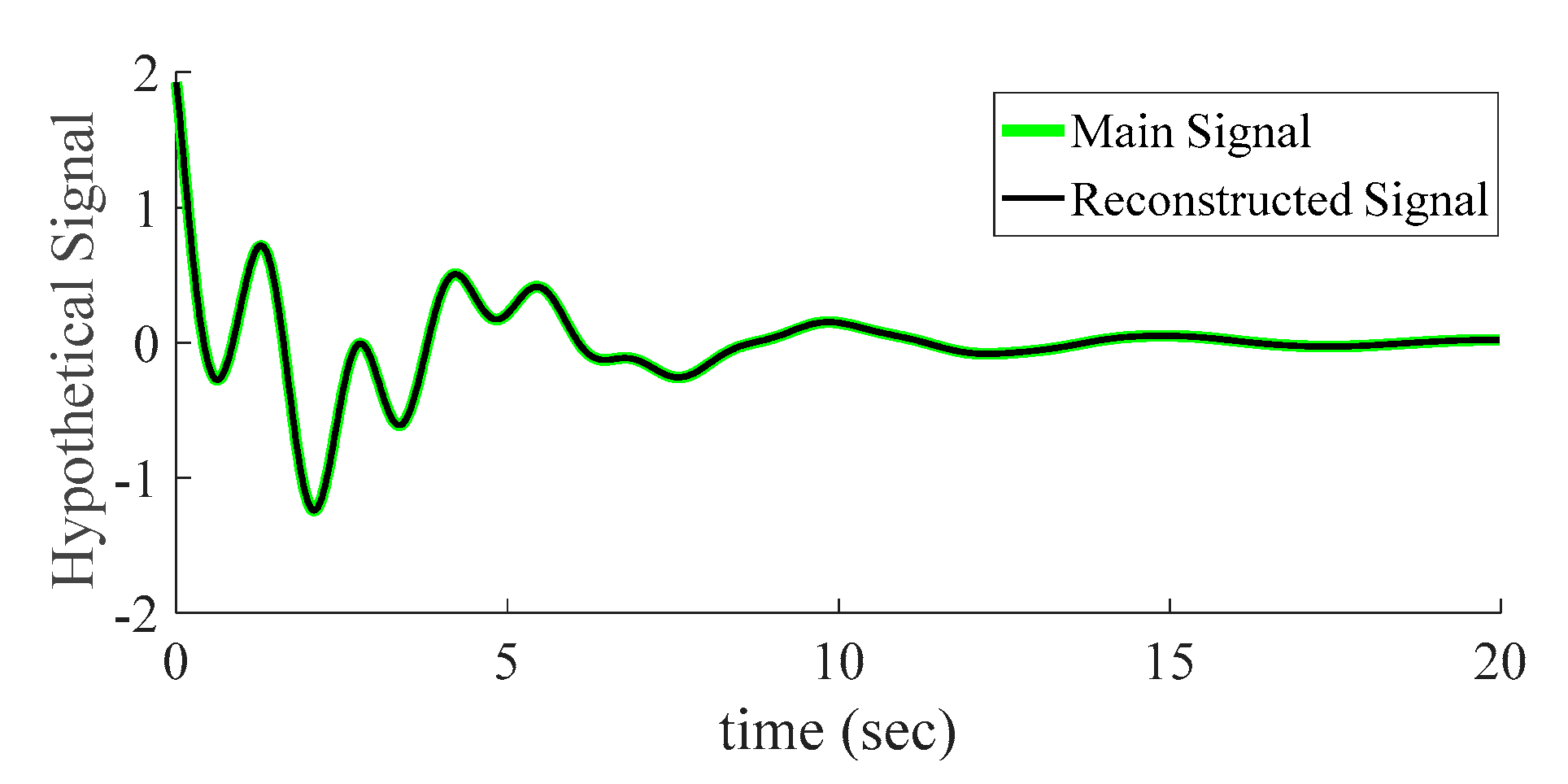
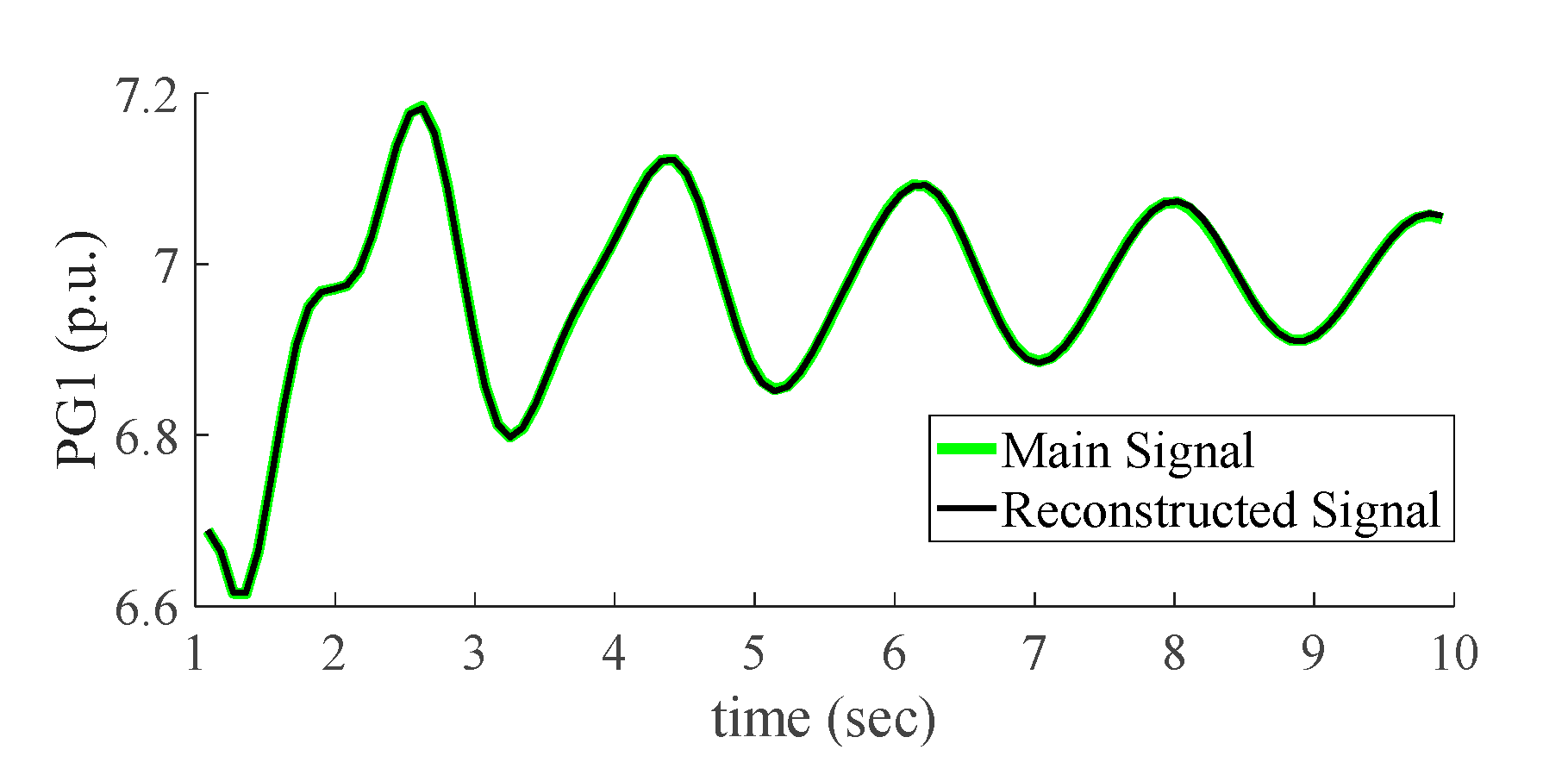
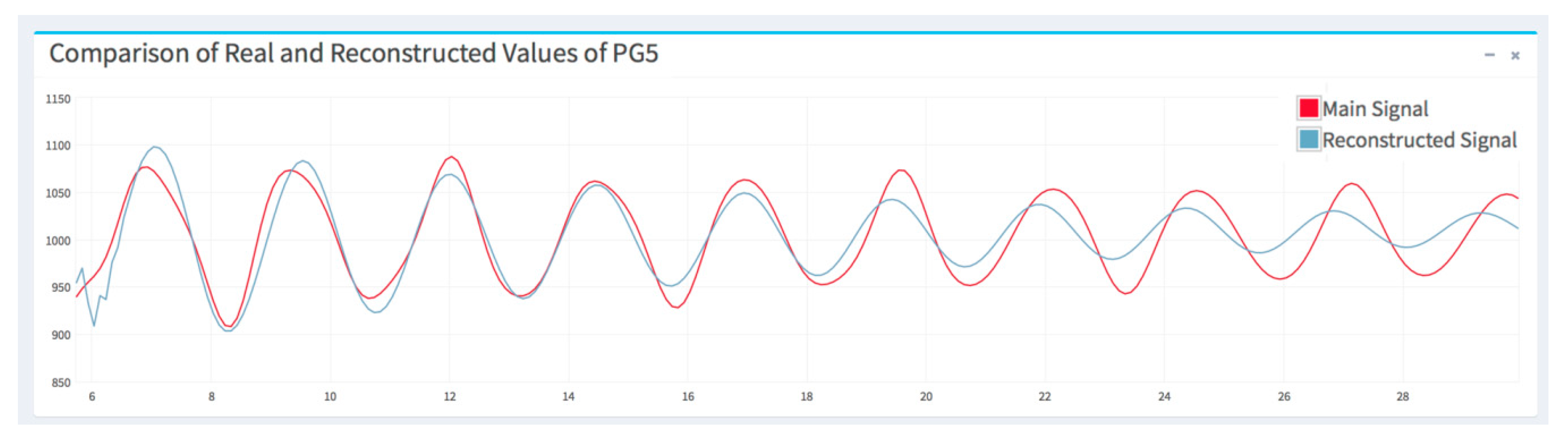
16] suggested that the Prony method can be performed in forward and backward manners, where the final modes are selected from the collection of those extracted in such a process. This process enabled the Prony method to identify extraneous modes, while allowed elimination of the noise effects. Prony is inherently a self-verifiable method because it estimates the modes of a given signal and then reconstructs the main signal from the estimated mode. Comparing the main and the reconstructed signal is a convenient way to verify its performance.
The above features make the Prony method an effective one for practical applications; however, it does not provide visual intuitiveness on contribution various system modes in each oscillatory modes. This is important because power system operators are interested in visual information instead of numerical data. In this regard, the HHT method has advantages over the Prony method, in which the so-called IMFs plots represent the behavior of each mode intuitively, and therefore provide situational awareness on oscillations of the power system. Moreover, the HHT method can determine the contribution of a state variable in a mode based on energy and phase relationship of IMFs. Nevertheless, as stated in the introduction, the HHT method suffers from the EEs, mode-mixing and Gibbs phenomena [
6,
9]. In this paper, an improved Prony method is proposed that is able to calculate IMFs and thus NCFs for a given signal.
Note that HHT has a much wider application than the Prony method and the authors don’t mean the proposed method is generally better than HHT, especially in non-linear situations. We compare our method with HHT because it is the only method that can calculate IMFs and NCFs. To achieve the IMFs and NCFs, HHT should overcome some challenges such as end-effects, mode mixing, and Gibbs phenomena. These challenges are solved in different literature. For example, there are several ways to overcome end-effect issue [
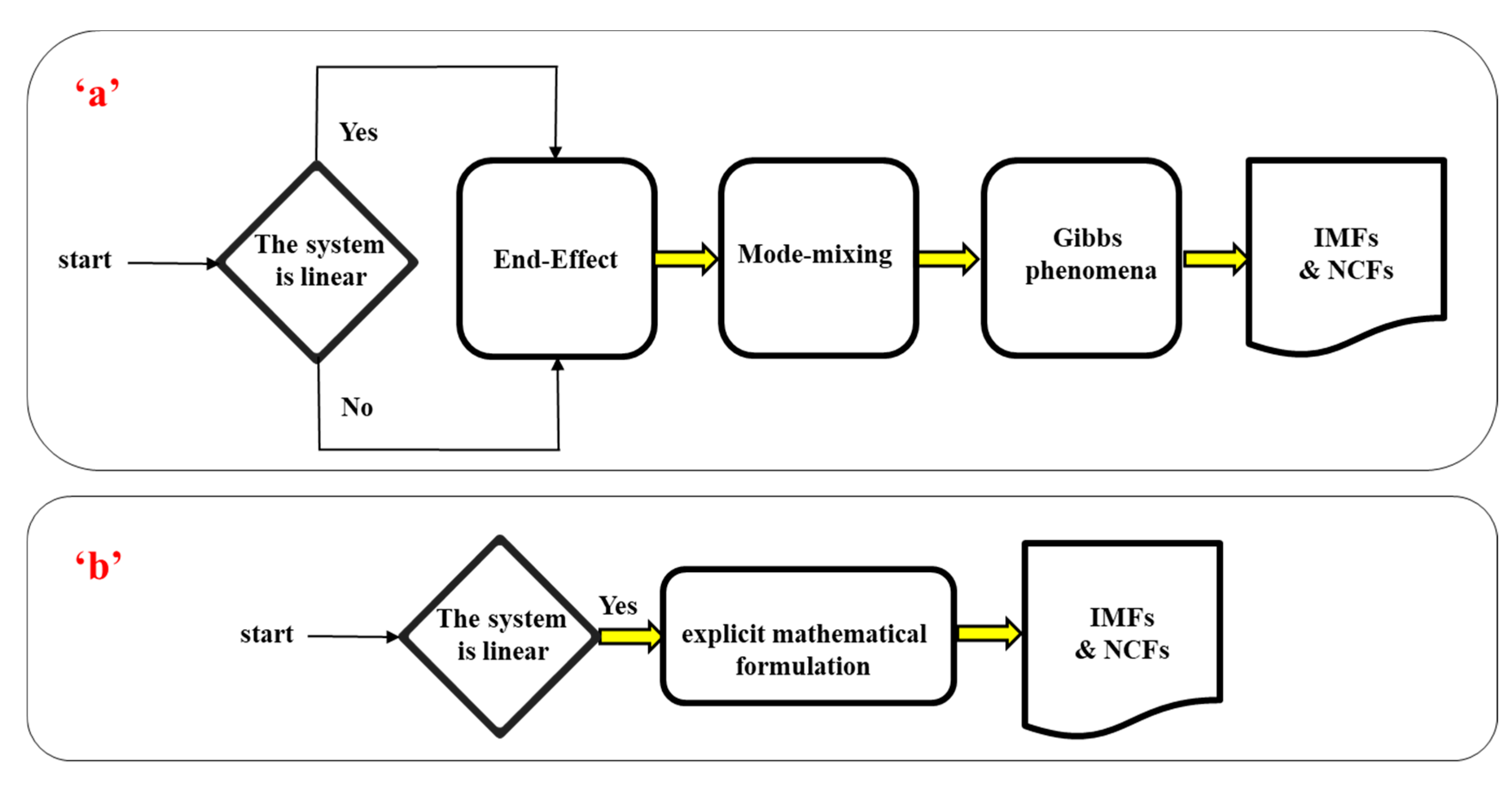
17]. In this paper, a direct method is proposed to obtain the IMFs and NCFs, in which the HHT challenges are avoided. Indeed, we are facing the alternative to obtain IMFs and NCFs as depicted in the following figure:
HHT method that obtains IMFs and NCFs carefully, after solving the end-effects, mode mixing, and Gibbs phenomena. It is based on a heuristic, iterative method. Although it can handle non-linear situations [
18], however, it is not the scope of this paper. Since we deal with the small signal stability assessment in which the linearization is an acceptable and reasonable assumption.
Our Proposed method, which obtains IMFs and NCFs carefully, directly and without need to solve the end-effects, mode mixing, and Gibbs phenomena. It is based on an explicit mathematical formulation. It can be used for applications such as oscillation analysis, which is scope of this paper.
Therefore, both methods (HHT and proposed method) can handle the IMFs and NCFs with different approaches and can be used based on the situations.
Figure 3, briefly shows the above discussions.
2.3. Oscillation Analysis Framework
Assuming a power system of order
, the zero-input time response is as follows [
14]:
where
are called eigenvalues or modes of the system. The Prony method represents a given signal as a sum of exponential functions and then estimates the unknown parameters, i.e.,
and
so that the real and the estimated output have a minimum difference. The estimated signal in the discrete time domain, and can be expressed as follows [
14]:
where,
are the eigenvalues of the system in the discrete time domain or
z-domain,
is the residue corresponding to
and
is the number of the samples. Equation (2) can be described in a matrix form as [
14]:
According to the Prony method, for a discrete time system with an output as (2), the so called characteristic equation is as follows [
14]:
The coefficients of the above equation are obtained by solving the predictive equation as follows [
14]:
which can be given in a matrix form as:
where,
is the Prony Matrix. For WAMS-monitored power systems, both
D and
contain synchrophasor data (e.g., voltages, currents, or powers). Based on the above formulations, the algorithm of the Prony method can be summarized as follows [
14,
15,
16]:
Constitute and using PMU data according to (5).
Solve a linear least square error (LSE) problem and obtain vector .
Solve the polynomial characteristic Equation (4) to achieve the z-domain eigenvalues.
Solve another LSE problem (3), using z values in Step 3.
Reconstruct the main signal using (2).
Based on the above algorithm, in Step 3, the
z-domain eigenvalues are calculated. The eigenvalues of the main signal can be obtained as follows [
14]:
where,
is the sampling rate of the main signal. In many cases, instead of complex values of eigenvalues, two well-known parameters of the modes, i.e., damping ratio
ξ and damping frequency
are represented, which are related to eigenvalues as follows [
1]:
2.4. Calculation of IMFs and NCFs Based on Augmented Prony Method
As previously stated, an online oscillation monitoring framework should be able to determine the contribution of various system buses in each oscillatory mode. Here, as one of the novel contributions of this work, it is demonstrated that the Prony method can be used for such a purpose. Initially, the matrix
is defined as follows:
where,
is defined as column
of matrix
, thus, for a complex eigenvalue, there is another eigenvalue which is the conjugate of
. Without the loss of generality, it is assumed that
and
are the conjugates of
and
, respectively (
), thus:
Substituting
from (9) into (10) yields:
where,
and
are defined as follows:
Thus, (11) can be rewritten as:
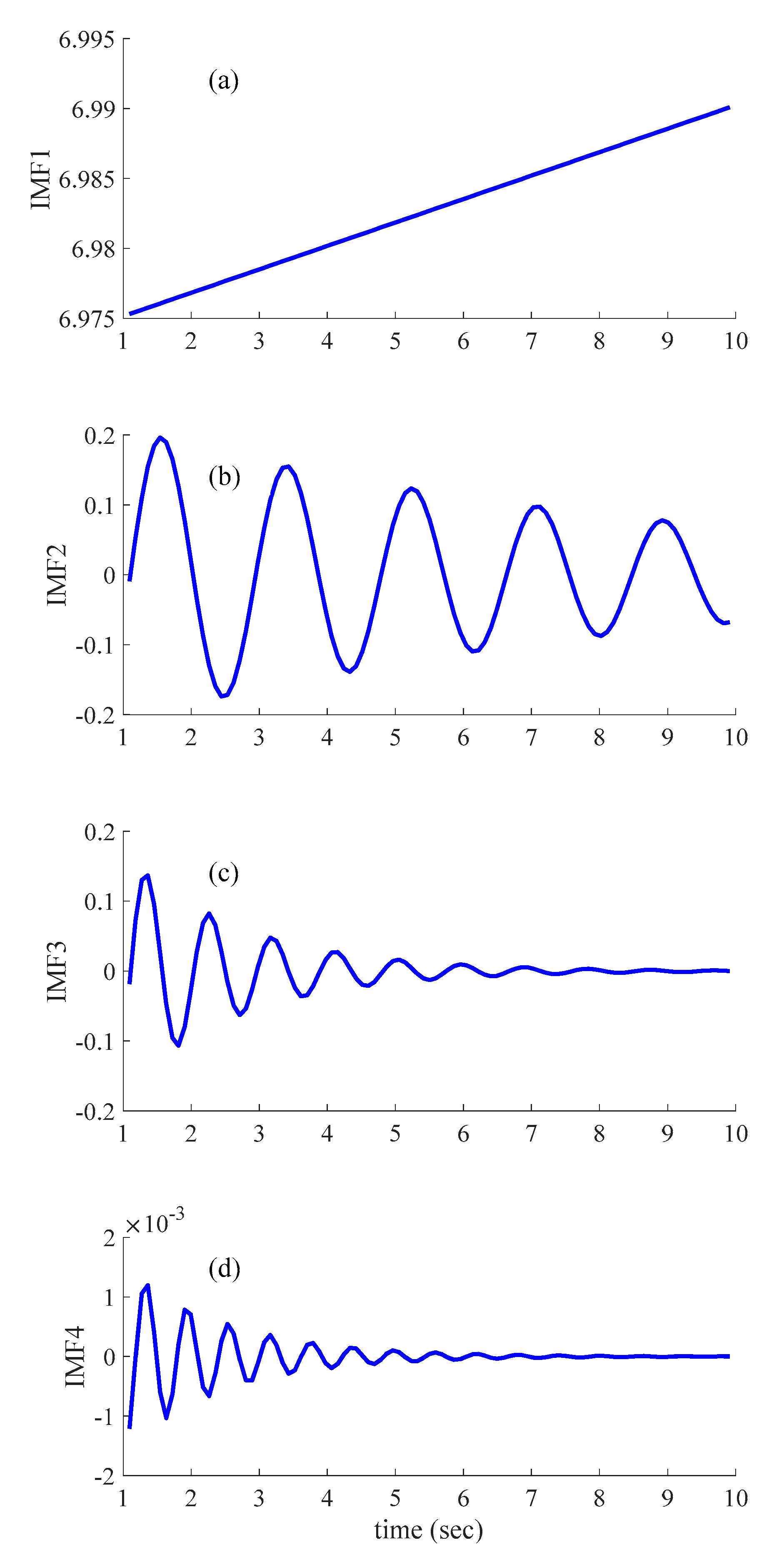
According to the definition of IMF (each of the exponential sinusoids contained in the main signal), the
kth row of the vector in (13) shows the value of IMF of mode
at the time
. Thus, IMFs can be calculated as in (14):
The above expression is valid for complex modes. For any real mode, its corresponding column in matrix
results in values of
. Therefore, a generalized form for the calculation of IMFs can be expressed as:
where,
is a binary variable that shows either mode
is complex (
) or not (
). Note that it is assumed in (15) that columns of the matrix
are sorted based on their real part.
Having intrinsic function of each mode, it is possible to determine the most associated state variable corresponding to each oscillatory mode, using energy and phase relationship of IMFs. In other words, the generator or actuator that is the most associated ones with a specific mode can be identified. As mentioned in the Introduction, the participation of each system bus in an oscillatory mode can be determined using node contribution factor (NCF). This index is defined as follows:
where,
represents the contribution of signal
in mode
.
is defined as the energy of
(related to mode
) obtained by signal
, which is defined as follows:
In (16),
is the average relative phase of
and the first IMF (
that is associated with the dominant mode) in different times:
In order to calculate
a phase angle is assigned to each data point of
. For all IMFs extracted from a measured signal of the network, the initial phase angle of the first IMF is defined as the reference phase (
). For a specific IMF, the phase angle of maximum, minimum, positive zero-crossing, and the negative zero-crossing points are set as π/2, 3π/2, 0 (or 2π) and π, respectively. According to the proposed formulation in (15)–(18), it is possible to directly calculate IMFs of the various signals of the system and therefore obtain their contributions in the different oscillatory modes. It is important to emphasize that so far, the Prony method has not been augmented for calculation of IMFs and thus NCFs. Our proposed formulation in this subsection bypasses the problems of nonlinear and the iterative method of HHT method for IMF calculation, such as the mode mixing of EMD, end effect and Gibbs phenomena [
6,
7,
8,
9].
Note that the understudy signal may contain noise that can be easily eliminated before performing the proposed method. It is worth mentioning that the mode mixing phenomena is not related to the noise. In the HHT method the IMFs are obtained using an iterative procedure with two loops, the outer loop repeats with the number of modes and for each mode an iterative procedure called sifting is performed to achieve the IMF associated with that mode. When the frequency of two modes of the system is close to each other, mode mixing may have occurred. In fact it is related to frequency heterodyne. Therefore, noise that is a high frequency signal may not mix with power system modes, which are low-frequency modes. In our proposed method, all sifting or decomposition procedures are not performed; therefore it is not prone to mode mixing. In the proposed method, each mode has a unique IMF. Thus, with an explicit mathematical formulation, each mode and its IMF are specifically extracted.
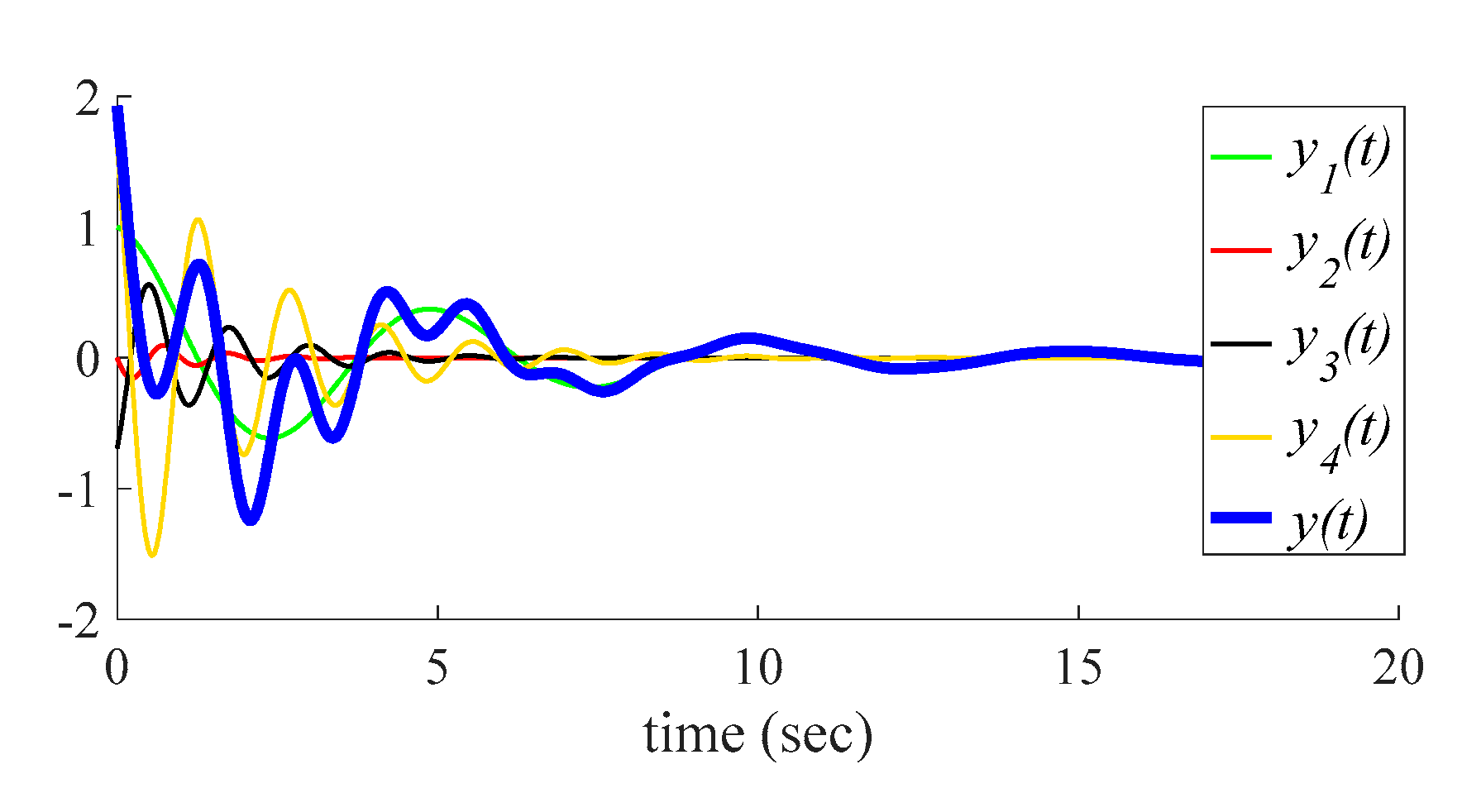
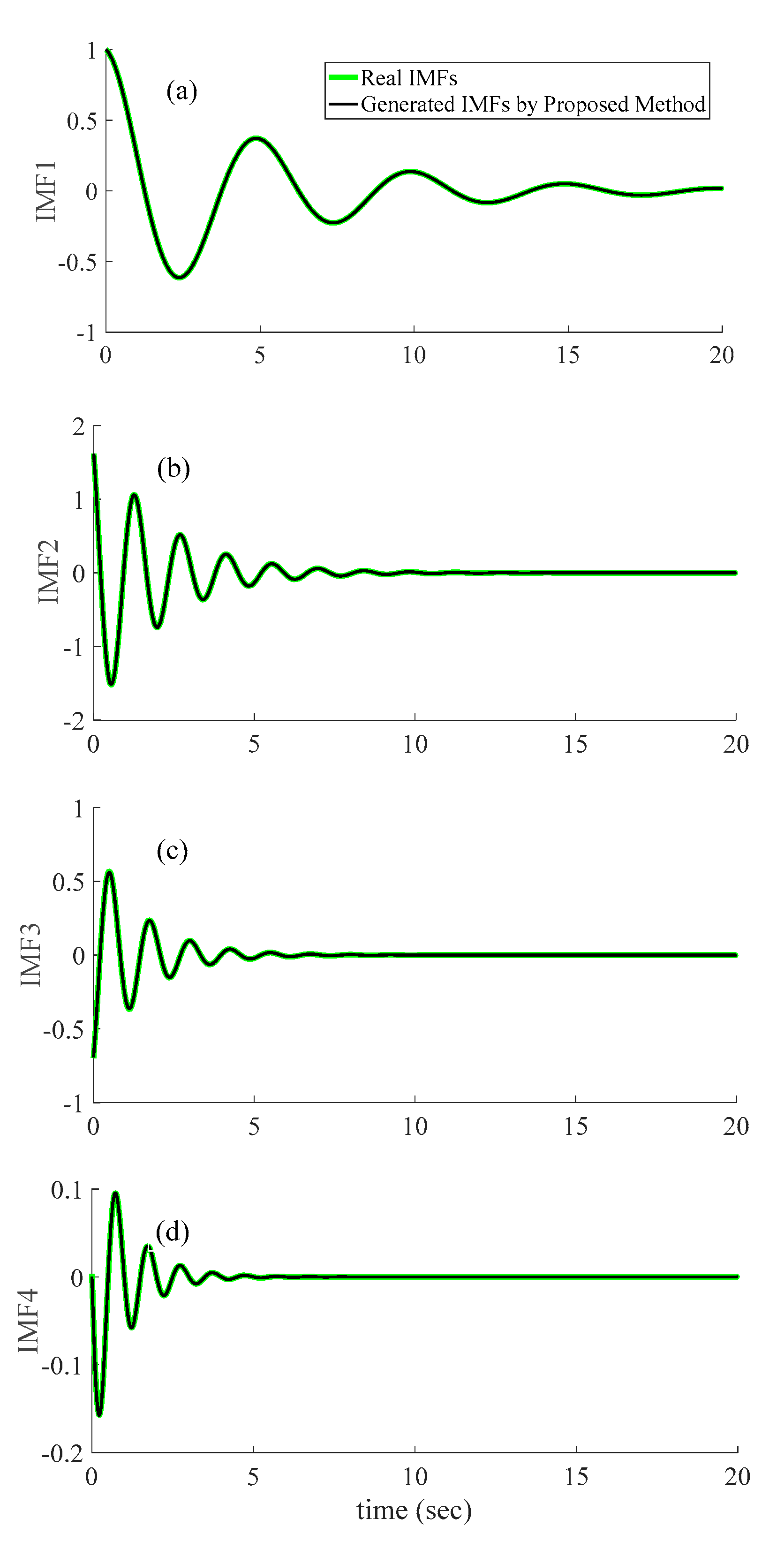
It is worth mentioning that power system oscillation detection and analysis is one of the topics of small signal stability assessment. In small signal stability assessment and analysis, it is generally accepted that the variation of the state variables of the system around the operating point are small, thus the differential equations of the system can reasonably be linearized at the operating point. The zero-input time response of such equations is seen in Equation (1). Therefore, despite the HHT method can handle signals without assumption of structure in Equation (1), in small signal stability analysis, which is the scope of this paper, we deal with the exponential sinusoids signals called intrinsic mode functions (IMFs). It is worth mentioning that the method is performed on many different signals with different parameters (amplitude, damping, frequency, and phase angle), and in all cases, the performance of the method in estimation of the mode parameters and extraction of the IMFs, are approved. However, an example of such signal is presented in
Section 3.1.


 and
and 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}