Simplified Sensorless Current Predictive Control of Synchronous Reluctance Motor Using Online Parameter Estimation



Abstract
:1. Introduction
2. Synchronous Reluctance Motor Modeling
3. The Proposed Extended Kalman Filter Estimator
- State vector and covariance matrices initialization, , Q, and R are set with initial values that obtained using offline PSO.
- State vector Prediction at sampling time as follows,
- Covariance matrix Prediction.where, A is the Jacobian matrix as:Therefore, the Jacobian matrix is calculated from (9) as follows,where; , ,,and
- Updating of state-vector:
- Error covariance matrix estimation:
- Put , , and go back to step 2.From the last steps of EKF, it can be revealed that the choice of covariance matrices parameters Q and R play an important role to get a sufficient estimation for EKF state variables. Furthermore, the parameters of of the speed controller play a significant part in the performance and robustness of the drive. Furthermore, tuning of these parameters , and efficiently consume a lot of time. Consequently, the particle swarm optimization (PSO) algorithm is used to tune these parameters.PSO is considered the most active procedure in solving different types of optimization problems with a little number of parameters to adjust [39]. This provides better efficiency than other trial and error methods. Firstly, PSO selects some set of random values of the unknown parameters and each set is represented as a particle. The objective function corresponding to each particle is calculated using the current position of each particle. Then, the particle corresponds to optimum objective value is selected and recorded after each iteration of the algorithm, and finally produces the global optimum solution [40,41]. In this model drive, the cost (objective) functions which used to select the best parameters is represented as follows.Apply the PSO in the whole drive system. Then, the following parameters have been selected.
4. Finite-Set Current Predictive Control of SynRM
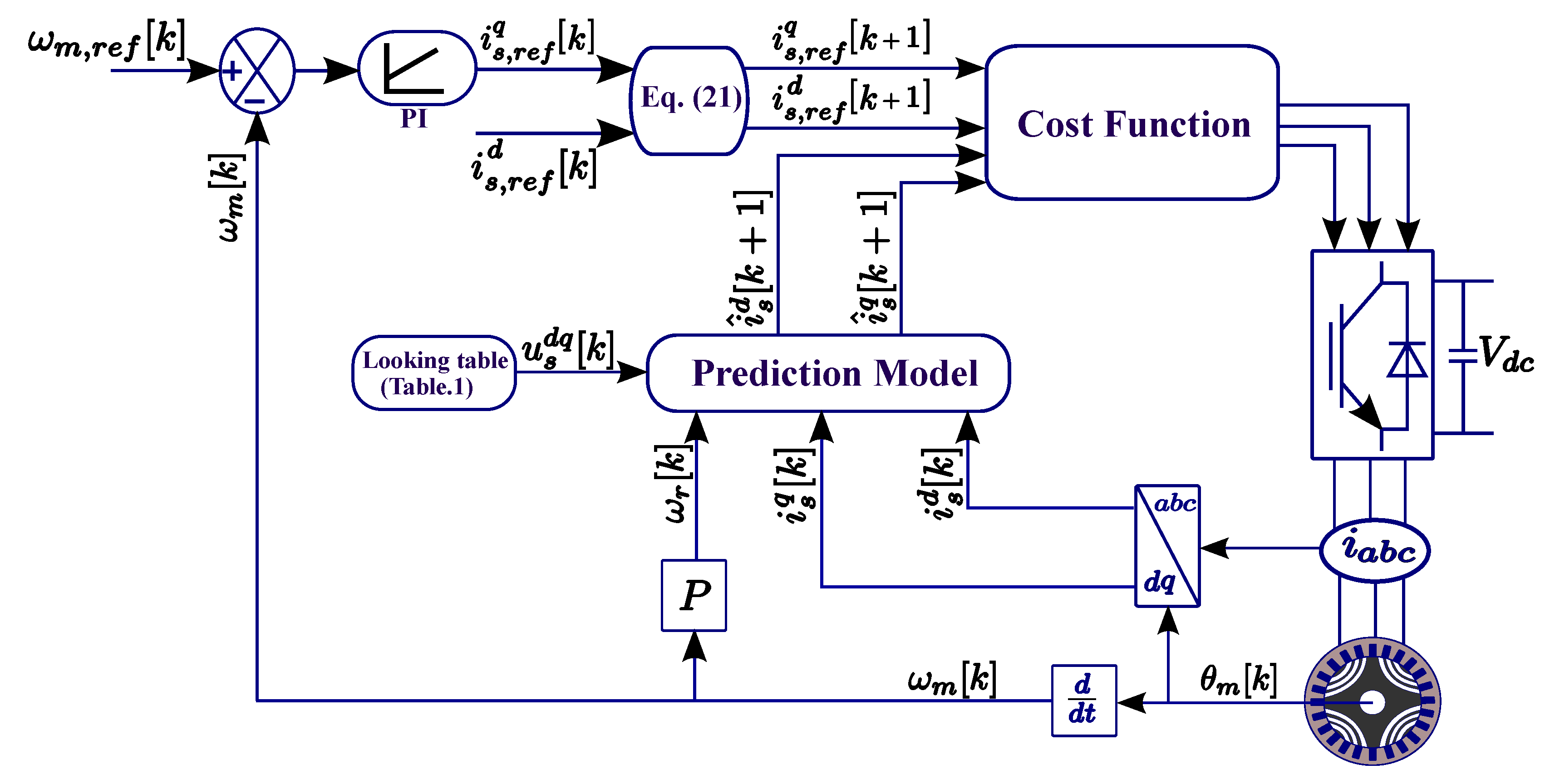
4.1. Conventional FSCPC of SynRM
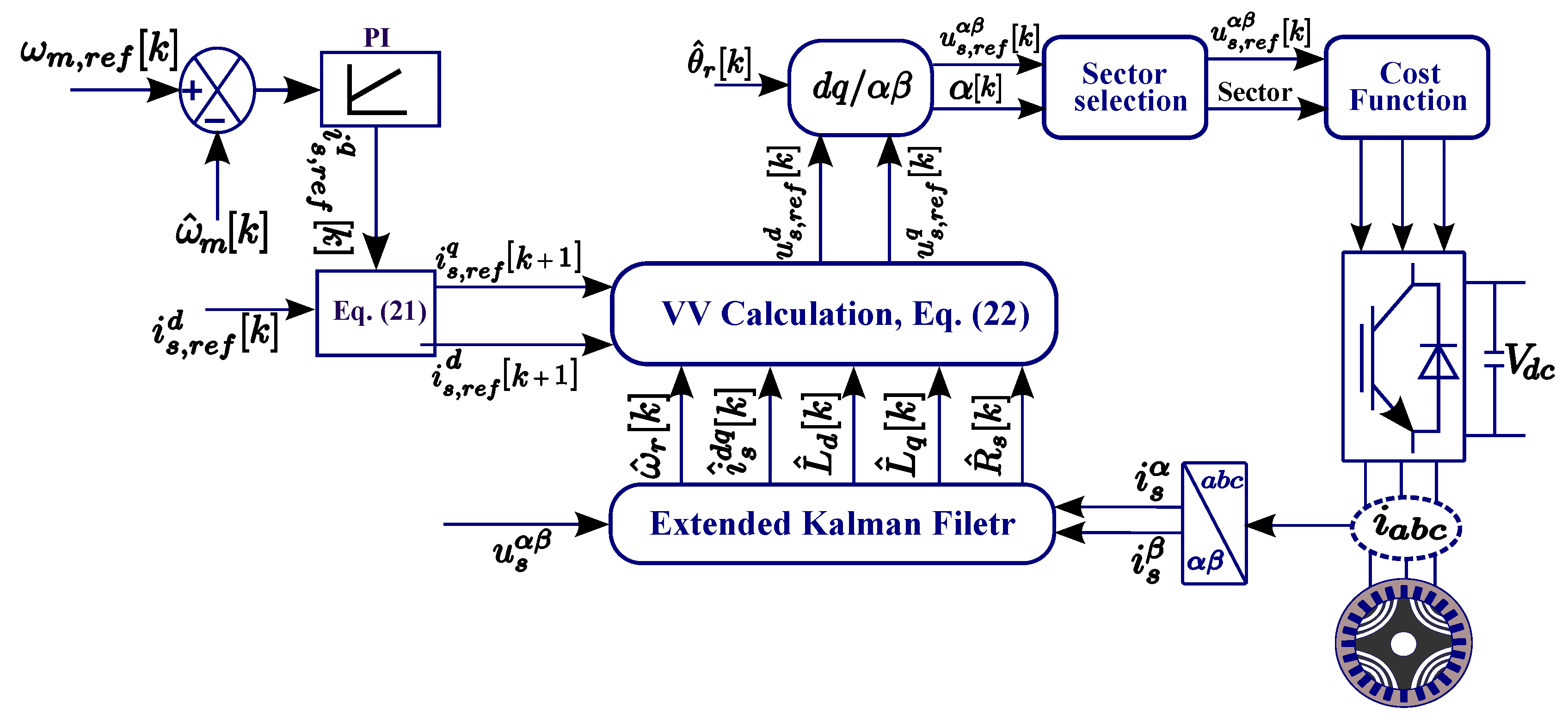
4.2. Proposed FSCPC of SynRM
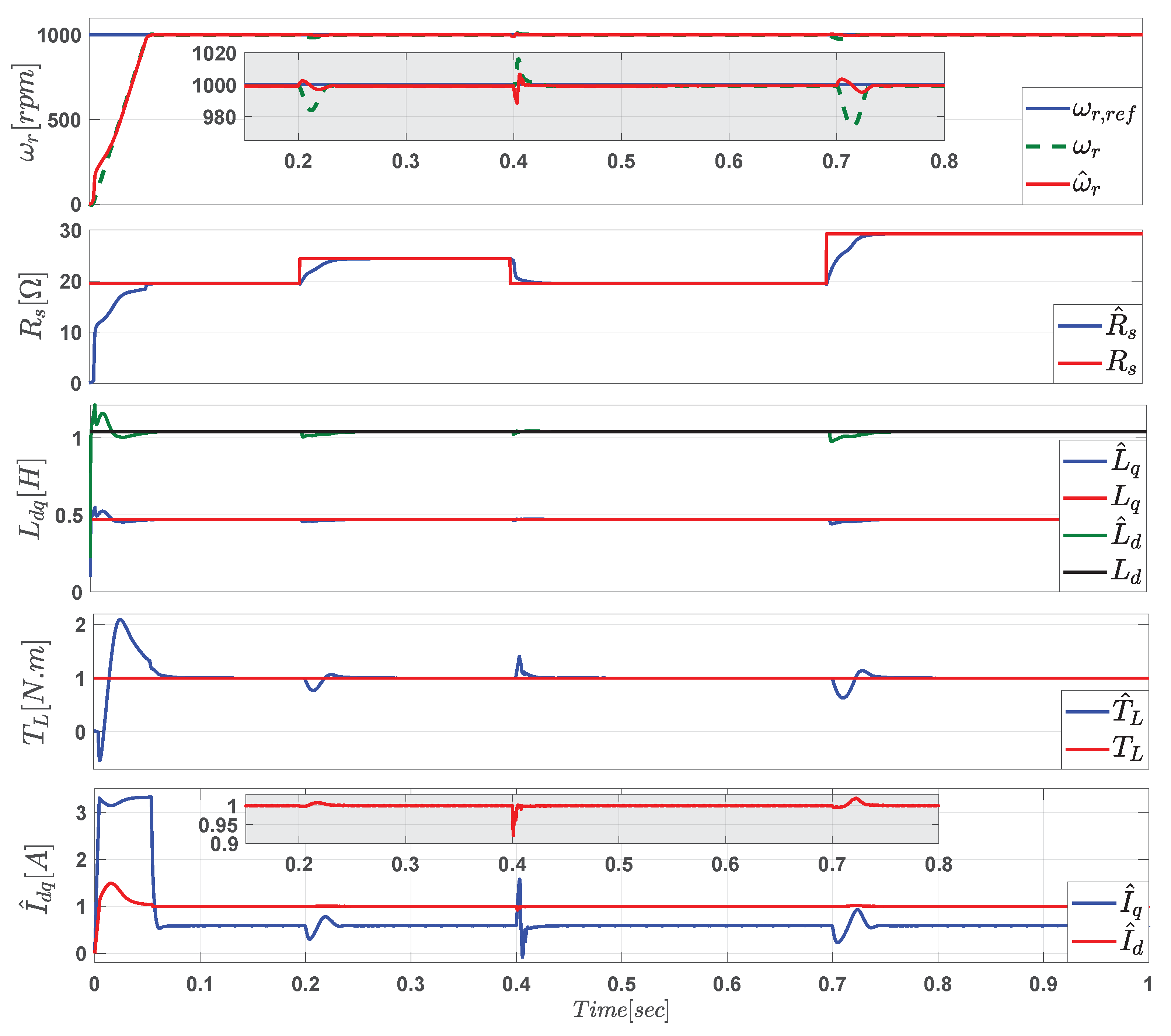
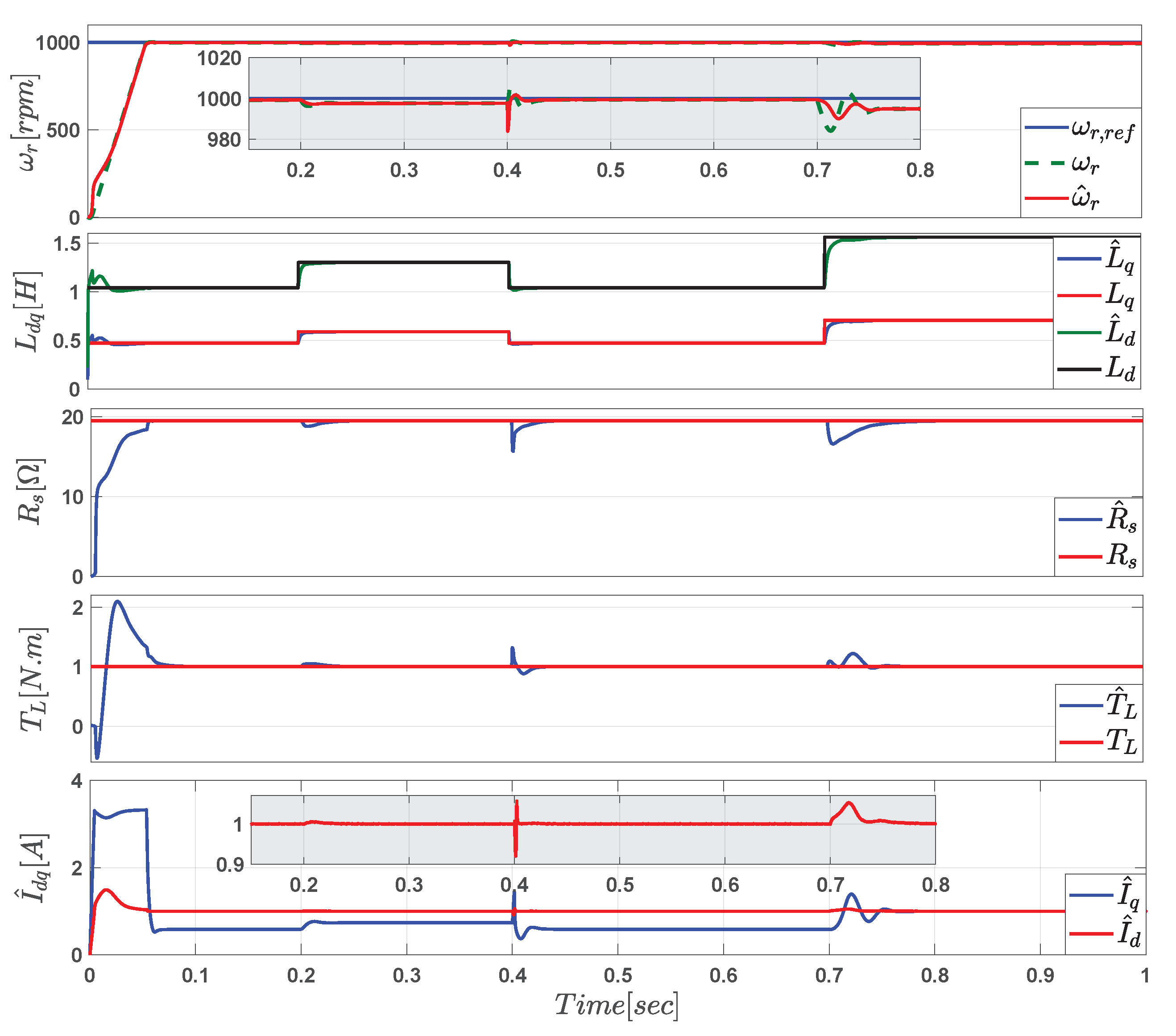
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lin, C.-K.; Lai, Y.-S.; Yu, H.-C. Improved model-free predictive current control for synchronous reluctance motor drives. IEEE Trans. Ind. Electr. 2016, 63, 3942–3953. [Google Scholar] [CrossRef]
- Trubenbach, R.A.; Mackay, A.T.; Kamper, M.J. Performance of a reluctance synchronous machine under vector control. In Proceedings of the IEEE Power Electronics Specialist Conference—PESC’93, Seattle, WA, USA, 20–24 June 1993; pp. 803–808. [Google Scholar]
- Farhan, A.; Saleh, A.; Shaltout, A. High performance reluctance synchronous motor drive using field oriented control. In Proceedings of the 2013 5th International Conference on Modelling, Identification and Control (ICMIC), Cairo, Egypt, 31 August–2 September 2013; pp. 181–186. [Google Scholar]
- Consoli, A.; Fabio, R.; Giuseppe, S.; Antonio, T. Low-and zero-speed sensorless control of synchronous reluctance motors. IEEE Trans. Ind. Appl. 1999, 35, 1050–1057. [Google Scholar] [CrossRef]
- Hadla, H.; Sérgio, C. Predictive stator flux and load angle control of synchronous reluctance motor drives operating in a wide speed range. IEEE Trans. Ind. Electr. 2017, 64, 6950–6959. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Gilbert, H.B.F.; Mahinda Vilathgamuwa, D.; Douglas, L.M. An improved robust field-weakeaning algorithm for direct-torque-controlled synchronous-reluctance-motor drives. IEEE Trans. Ind. Electr. 2014, 62, 3255–3264. [Google Scholar] [CrossRef]
- Tang, L.; Limin, Z.; Muhammed, F.R.; Hu, Y. A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency. IEEE Trans. Power Electr. 2004, 19, 346–354. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Power Electr. 2015, 31, 1381–1390. [Google Scholar] [CrossRef]
- Hong, J.; Pan, D.; Zong, Z. Comparison of the two current predictive-control methods for a segment-winding permanent-magnet linear synchronous motor. IEEE Trans. Plasma Sci. 2013, 41, 1167–1173. [Google Scholar] [CrossRef]
- Lin, C.-K.; Liu, T.-H.; Fu, L.-C.; Hsiao, C.-F. Model-free predictive current control for interior permanent-magnet synchronous motor drives based on current difference detection technique. IEEE Trans. Ind. Electr. 2013, 61, 667–681. [Google Scholar] [CrossRef]
- Xia, C.; Wang, Y.; Shi, T. Implementation of finite-state model predictive control for commutation torque ripple minimization of permanent-magnet brushless DC motor. IEEE Trans. Ind. Electr. 2012, 60, 896–905. [Google Scholar] [CrossRef]
- Carlet, P.G.; Fabio, T.; Silverio, B.; Mauro, Z. An Effective Model-free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef] [Green Version]
- Abdelrahem, M.; Christoph, M.H.; Ralph, K.; Jose, R. Efficient Direct-Model Predictive Control with Discrete-Time Integral Action for PMSGs. IEEE Trans. Energy Convers. 2018, 34, 1063–1072. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Christoph, M.H.; Ralph, K. Simplified model predictive current control without mechanical sensors for variable-speed wind energy conversion systems. Electr. Eng. 2017, 99, 367–377. [Google Scholar] [CrossRef]
- Gao, X.; Mohamed, A.; Christoph, M.H.; Zhenbin, Z.; Ralph, K. Direct Predictive Speed Control With a Sliding Manifold Term for PMSM Drives. IEEE J. Emerg. Sel. Top. Power Electr. 2019. [Google Scholar] [CrossRef]
- Cortés, P.; Marian, P.K.; Ralph, M.K.; Daniel, E.Q.; José, R. Predictive control in power electronics and drives. IEEE Trans. Ind. Electr. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Christoph, M.H.; Billel, K.; Ralph, K. Predictive Direct Torque Control Strategy for Surface-Mounted Permanent-Magnet Synchronous Generators. In Proceedings of the NEIS 2017—Conference on Sustainable Energy Supply and Energy Storage Systems, Hamburg, Germany, 21–22 September 2017; pp. 1–6. [Google Scholar]
- Gonçalves, P.F.C.; Sérgio, M.A.C.; André, M.S.M. Comparison of model predictive control strategies for six-phase permanent magnet synchronous machines. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5801–5806. [Google Scholar]
- Gonçalves, P.; Sérgio, C.; André, M. Finite Control Set Model Predictive Control of Six-Phase Asymmetrical Machines—An Overview. Energies 2019, 12, 4693. [Google Scholar] [CrossRef] [Green Version]
- Hadla, S.C.H. Active flux based finite control set model predictive control of synchronous reluctance motor drives. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016. [Google Scholar]
- Morales-Caporal, R.; Mario, P. A predictive torque control for the synchronous reluctance machine taking into account the magnetic cross saturation. IEEE Trans. Ind. Electr. 2007, 54, 1161–1167. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Ralph, K. Efficient direct model predictive control for doubly-fed induction generators. Electr. Power Compon. Syst. 2017, 45, 574–587. [Google Scholar] [CrossRef]
- Zhang, Y.; Hua, L. Simplified model predictive current control method of voltage-source inverter. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 1726–1733. [Google Scholar]
- Cortes, P.; Alan, W.; Samir, K.; Jose, R.; Haitham, A.-R. Model predictive control of multilevel cascaded H-bridge inverters. IEEE Trans. Ind. Electr. 2010, 57, 2691–2699. [Google Scholar] [CrossRef]
- Agarlita, S.-C.; Ion, B.; Frede, B. High Frequency Injection Assisted “Active-Flux” Based Sensorless Vector Control of Reluctance Synchronous Motors, With Experiments From Zero Speed. IEEE Trans. Ind. Appl. 2012, 48, 1931–1939. [Google Scholar] [CrossRef]
- Consoli, A.; Giuseppe, S.; Giacomo, S.; Antonio, T.; Domenico, A.T. Sensorless rotor position estimation in synchronous reluctance motors exploiting a flux deviation approach. IEEE Trans. Ind. Appl. 2007, 43, 1266–1273. [Google Scholar] [CrossRef]
- El Murr, G.; Damian, G.; Finch, J.W. Universal PLL strategy for sensorless speed and position estimation of PMSM. In Proceedings of the 2008 IEEE Region 10 and the Third international Conference on Industrial and Information Systems, Kharagpur, India, 8–10 December 2008; pp. 1–6. [Google Scholar]
- Doan, P.T.; Thanh, L.B.; Hak, K.K.; Gi, S.B.; Sang, B.K. Rotor speed estimation based on extended Kalman filter for sensorless vector control of induction motor. In AETA 2013: Recent Advances in Electrical Engineering and Related Sciences; Springer: Berlin/Heidelberg, Germany, 2014; pp. 477–486. [Google Scholar]
- Shi, K.L.; Chan, T.F.; Wong, Y.K.; Ho, S.L. Speed estimation of an induction motor drive using an optimized extended Kalman filter. IEEE Trans. Ind. Electr. 2002, 49, 124–133. [Google Scholar] [CrossRef] [Green Version]
- Bolognani, S.; Luca, T.; Mauro, Z. Extended Kalman filter tuning in sensorless PMSM drives. IEEE Trans. Ind. Appl. 2003, 39, 1741–1747. [Google Scholar] [CrossRef]
- Nguyen, D.-Q.; Luc, L.; Kada, D. High-speed sensorless control of a synchronous reluctance motor based on an extended Kalman filter. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–10. [Google Scholar]
- Senjyu, T.; Kaname, K.; Naomitsu, U.; Katsumi, U. Sensorless control of synchronous reluctance motors considering the stator iron loss with extended Kalman filter. In Proceedings of the IEEE 34th Annual Conference on Power Electronics Specialist, Acapulco, Mexico, 15–19 June 2003; Volume 1, pp. 403–408. [Google Scholar]
- Shi, Y.; Kai, S.; Lipei, H.; Li, Y. Online identification of permanent magnet flux based on extended Kalman filter for IPMSM drive with position sensorless control. IEEE Trans. Ind. Electr. 2011, 59, 4169–4178. [Google Scholar] [CrossRef]
- Liu, T.-H.; Hade, S.H.; Tseng, S.-K. Predictive controller design for a high-frequency injection sensorless synchronous reluctance drive system. IET Electr. Power Appl. 2017, 11, 902–910. [Google Scholar] [CrossRef]
- Chen, J.-L.; Liu, T.-H. Implementation of a predictive controller for a sensorless interior permanent-magnet synchronous motor drive system. IET Electr. Power Appl. 2012, 6, 513–525. [Google Scholar] [CrossRef]
- Ichikawa, S.; Mutuwo, T.; Shinji, D.; Shigeru, O. Sensorless Control of Synchronous Reluctance Motors based on an Extended Electromotive Force Model and Inductance Measurement in the Model. IEEJ Trans. Ind. Appl. 2005, 125, 16–25. [Google Scholar] [CrossRef] [Green Version]
- Janiszewski, D. Extended Kalman Filter based speed sensorless PMSM control with load reconstruction. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 1465–1468. [Google Scholar]
- Senjyu, T.; Kaname, K.; Naomitsu, U.; Katsumi, U. High efficiency control of synchronous reluctance motors using extended Kalman filter. IEEE Trans. Ind. Electr. 2003, 50, 726–732. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization (PSO). In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Calvini, M.; Mauro, C.; Andrea, F.; Mario, M. PSO-based self-commissioning of electrical motor drives. IEEE Trans. Ind. Electr. 2014, 62, 768–776. [Google Scholar] [CrossRef]
- Del, V.; Yamille, G.K.; Salman, M.; Jean-Carlos, H.; Ronald, G.H. Particle swarm optimization: Basic concepts, variants and applications in power systems. IEEE Trans. Evol. Comput. 2008, 12, 171–195. [Google Scholar]
- Sanada, M.; Hiramoto, K.; Morimoto, S.; Takeda, Y. Torque ripple improvement for synchronous reluctance motor using an asymmetric flux barrier arrangement. IEEE Trans. Ind. Appl. 2004, 40, 1076–1082. [Google Scholar] [CrossRef]
- Vagati, A.; Aldo, C.; Mario, C.; Michele, P.; Maurizio, R. Design refinement of synchronous reluctance motors through finite-element analysis. IEEE Trans. Ind. Appl. 2000, 36, 1094–1102. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conducting Modes | Switching States | Output Voltages | |||
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | |
| 1 | 0 | 0 | 0 | ||
| 1 | 1 | 0 | |||
| 0 | 1 | 0 | |||
| 0 | 1 | 1 | 0 | ||
| 0 | 0 | 1 | |||
| 1 | 0 | 1 | |||
| 1 | 1 | 1 | 0 | 0 | |
| Parameter | Nomenclature/Unit | Value |
|---|---|---|
| Rated power | P [] | 175 |
| Rated voltage | V [] | 380 |
| Rated speed (mechanical) | [rpm] | 1500 |
| Rated current | [] | |
| frequency | F [] | 3∼50 |
| Nominal d-axis inductance | [] | |
| Nominal q-axis inductance | [] | |
| Nominal Stator resistance | [] | |
| Number of Pole pairs | P | 2 |
| Rotor inertia | J [kg m] |
| Proposed FSCPC | Conventional FSCPC | |
|---|---|---|
| Dynamic response | Fast | Fast |
| Steady state error | Close to Zero | low |
| Current THD | Very low | Low |
| Torque ripples | Some | Some |
| sensitivity | Low | High |
| sensitivity | Very low | Very High |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farhan, A.; Abdelrahem, M.; Saleh, A.; Shaltout, A.; Kennel, R. Simplified Sensorless Current Predictive Control of Synchronous Reluctance Motor Using Online Parameter Estimation. Energies 2020, 13, 492. https://0-doi-org.brum.beds.ac.uk/10.3390/en13020492
Farhan A, Abdelrahem M, Saleh A, Shaltout A, Kennel R. Simplified Sensorless Current Predictive Control of Synchronous Reluctance Motor Using Online Parameter Estimation. Energies. 2020; 13(2):492. https://0-doi-org.brum.beds.ac.uk/10.3390/en13020492
Chicago/Turabian StyleFarhan, Ahmed, Mohamed Abdelrahem, Amr Saleh, Adel Shaltout, and Ralph Kennel. 2020. "Simplified Sensorless Current Predictive Control of Synchronous Reluctance Motor Using Online Parameter Estimation" Energies 13, no. 2: 492. https://0-doi-org.brum.beds.ac.uk/10.3390/en13020492