Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot



Abstract
:
1. Introduction
2. Materials and Methods
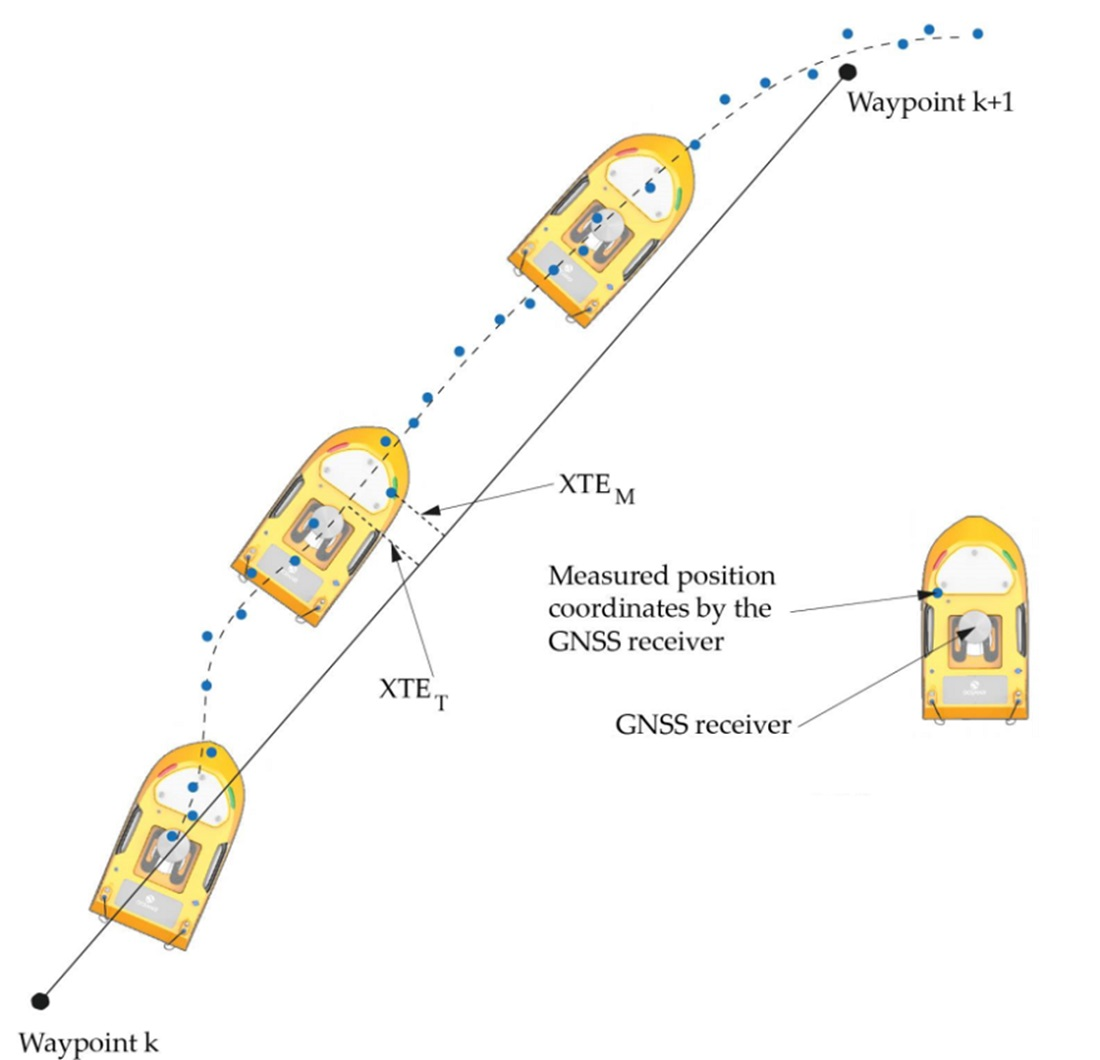
2.1. XTE Parameter of the USV
2.2. Measurements
2.3. Algorithm for Determining the XTE Parameter
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brčić, D.; Kos, S.; Žuškin, S. Navigation with ECDIS: Choosing the Proper Secondary Positioning Source. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 317–326. [Google Scholar] [CrossRef]
- International Hydrographic Organization. Hydrographic Dictionary, 5th ed.; English Special Publication No. 32; IHO: Monte Carlo, Monaco, 1994. [Google Scholar]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping Topobathymetry in a Shallow Tidal Environment Using Low-cost Technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Specht, C.; Specht, M.; Cywiński, P.; Skóra, M.; Marchel, Ł.; Szychowski, P. A New Method for Determining the Territorial Sea Baseline Using an Unmanned, Hydrographic Surface Vessel. J. Coast. Res. 2019, 35, 925–936. [Google Scholar] [CrossRef]
- Umbach, M.J. Hydrographic Manual, 4th ed.; NOAA: Silver Spring, MD, USA, 1976. [Google Scholar]
- United States Army Corps of Engineers. EM 1110-2-1003 USACE Standards for Hydrographic Surveys; USACE: Washington, DC, USA, 2013. [Google Scholar]
- Grządziel, A.; Felski, A.; Wąż, M. Experience with the Use of a Rigidly-mounted Side-scan Sonar in a Harbour Basin Bottom Investigation. Ocean Eng. 2015, 109, 439–443. [Google Scholar] [CrossRef]
- Jang, W.; Park, H.; Park, S. Analysis of Positioning Accuracy of PPP, VRS, DGPS in Coast and Inland Water Area of South Korea. J. Coast. Res. 2018, 85, 1276–1280. [Google Scholar] [CrossRef]
- Jang, W.; Park, H.; Seo, K.; Kim, Y. Analysis of Positioning Accuracy Using Differential GNSS in the Coast and Port Area of South Korea. J. Coast. Res. 2016, 75, 1337–1341. [Google Scholar] [CrossRef]
- Song, F.; Gong, S.; Zhou, R. Underwater Topography Survey and Precision Analysis Based on Depth Sounder and CORS-RTK Technology. IOP Mater. Sci. Eng. 2020, 780, 042051. [Google Scholar] [CrossRef]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring Sandy Shores Morphologies by DGPS–A Practical Tool to Generate Digital Elevation Models. J. Coast. Res. 2008, 246, 1516–1528. [Google Scholar] [CrossRef]
- Dziewicki, M.; Specht, C. Position Accuracy Evaluation of the Modernized Polish DGPS. Pol. Marit. Res. 2009, 16, 57–61. [Google Scholar] [CrossRef]
- Moore, T.; Hill, C.; Monteiro, L. Is DGPS Still a Good Option for Mariners? J. Navig. 2001, 54, 437–446. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative Analysis of Positioning Accuracy of Samsung Galaxy Smartphones in Stationary Measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef] [PubMed]
- Canadian Hydrographic Service. CHS Standards for Hydrographic Surveys, 2nd ed.; CHS: Ottawa, ON, Canada, 2013. [Google Scholar]
- International Hydrographic Organization. IHO Standards for Hydrographic Surveys, 5th ed.; Special Publication No. 44; IHO: Monte Carlo, Monaco, 2008. [Google Scholar]
- International Hydrographic Organization. Manual on Hydrography, 1st ed.; Publication C-13; IHO: Monte Carlo, Monaco, 2005. [Google Scholar]
- National Oceanic and Atmospheric Administration. NOS Hydrographic Surveys Specifications and Deliverables; NOAA: Silver Spring, MD, USA, 2017. [Google Scholar]
- Breivik, M. Topics in Guided Motion Control of Marine Vehicles. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned Surface Vehicles: An Overview of Developments and Challenges. Ann. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Kum, B.-C.; Shin, D.-H.; Lee, J.H.; Moh, T.J.; Jang, S.; Lee, S.Y.; Cho, J.H. Monitoring Applications for Multifunctional Unmanned Surface Vehicles in Marine Coastal Environments. J. Coast. Res. 2018, 85, 1381–1385. [Google Scholar] [CrossRef]
- Bellingham, J.G.; Rajan, K. Robotics in Remote and Hostile Environments. Science 2007, 318, 1098–1102. [Google Scholar] [CrossRef] [Green Version]
- Specht, M.; Specht, C.; Szafran, M.; Makar, A.; Dąbrowski, P.; Lasota, H.; Cywiński, P. The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk. Remote Sens. 2020, 12, 2585. [Google Scholar] [CrossRef]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef] [Green Version]
- Jorge, V.A.M.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.F.; dos Santos, D.H.; Gonçalves, L.M.G.; Amory, A.M. A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors 2019, 19, 702. [Google Scholar] [CrossRef] [Green Version]
- Cui, K.; Lin, B.; Sun, W.; Sun, W. Learning-based Task Offloading for Marine Fog-cloud Computing Networks of USV Cluster. Electronics 2019, 8, 1287. [Google Scholar] [CrossRef] [Green Version]
- Naus, K.; Marchel, Ł. Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters. Appl. Sci. 2019, 9, 3530. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. ISPRS Int. J. Geo-Inf. 2019, 8, 80. [Google Scholar] [CrossRef] [Green Version]
- Lv, C.; Yu, H.; Hua, Z.; Li, L.; Chi, J. Speed and Heading Control of an Unmanned Surface Vehicle Based on State Error PCH Principle. Math. Probl. Eng. 2018, 2018, 7371829. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-art Research on Motion Control of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.; Jeong, S.-K.; Ji, D.-H.; Tran, N.-H.; Vu, M.T.; Choi, H.-S. Study on Control System of Integrated Unmanned Surface Vehicle and Underwater Vehicle. Sensors 2020, 20, 2633. [Google Scholar] [CrossRef] [PubMed]
- Mou, J.; He, Y.; Zhang, B.; Li, S.; Xiong, Y. Path Following of a Water-jetted USV Based on Maneuverability Tests. J. Mar. Sci. Eng. 2020, 8, 354. [Google Scholar] [CrossRef]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating Sensors into a Marine Drone for Bathymetric 3D Surveys in Shallow Waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suhari, K.T.; Karim, H.; Gunawan, P.H.; Purwanto, H. Small ROV Marine Boat for Bathymetry Surveys of Shallow Waters—Potential Implementation in Malaysia. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, XLII-4/W5, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Mattei, G.; Troisi, S.; Aucelli, P.P.C.; Pappone, G.; Peluso, F.; Stefanile, M. Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV. Water 2018, 10, 1686. [Google Scholar] [CrossRef] [Green Version]
- Cloet, R.L. The Effect of Line Spacing on Survey Accuracy in a Sand-wave Area. Hydrogr. J. 1976, 2, 5–11. [Google Scholar]
- Bouwmeester, E.C.; Heemink, A.W. Optimal Line Spacing in Hydrographic Survey. Int. Hydrogr. Rev. 1993, LXX, 37–48. [Google Scholar]
- Yang, Y.; Li, Q.; Zhang, J.; Xie, Y. Iterative Learning-based Path and Speed Profile Optimization for an Unmanned Surface Vehicle. Sensors 2020, 20, 439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kadyrov, M.; Greshnikov, P.; Maltsev, S.; Maistro, A.; Pereverzev, A.; Kiselev, K.; Durnev, A.; Starobinskii, E.; Buldakov, P. Design and Construction of the Cadet-M Unmanned Marine Platform Using Alternative Energy. E3S Web Conf. 2019, 140, 02011. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Burdziakowski, P.; Najdecka, K.; Domagalska-Stateczna, B. Accuracy of Trajectory Tracking Based on Nonlinear Guidance Logic for Hydrographic Unmanned Surface Vessels. Sensors 2020, 20, 832. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aguiar, A.P.; Hespanha, J.P. Trajectory-tracking and Path following of Underactuated Autonomous Vehicles with Parametric Modeling Uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef] [Green Version]
- Do, K.D.; Pan, J. Global Tracking Control of Underactuated Ships with Nonzero Off-diagonal Terms in Their System Matrices. Automatica 2005, 41, 87–95. [Google Scholar] [CrossRef]
- Li, C.; Jiang, J.; Duan, F.; Liu, W.; Wang, X.; Bu, L.; Sun, Z.; Yang, G. Modeling and Experimental Testing of an Unmanned Surface Vehicle with Rudderless Double Thrusters. Sensors 2019, 19, 2051. [Google Scholar] [CrossRef] [Green Version]
- Kristić, M.; Žuškin, S.; Brčić, D.; Valčić, S. Zone of Confidence Impact on Cross Track Limit Determination in ECDIS Passage Planning. J. Mar. Sci. Eng. 2020, 8, 566. [Google Scholar] [CrossRef]
- Azar, A.T.; Ammar, H.H.; Ibrahim, Z.F.; Ibrahim, H.A.; Mohamed, N.A.; Taha, M.A. Implementation of PID Controller with PSO Tuning for Autonomous Vehicle. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2019 (AISI 2019), Cairo, Egypt, 26–28 October 2019. [Google Scholar]
- Miskovic, N.; Vukic, Z.; Barisic, M.; Tovornik, B. Autotuning Autopilots for Micro-ROVs. In Proceedings of the 2006 14th Mediterranean Conference on Control and Automation (MED 2006), Ancona, Italy, 28–30 June 2006. [Google Scholar]
- Pan, Y.; Huang, D.; Sun, Z. Backstepping Adaptive Fuzzy Control for Track-keeping of Underactuated Surface Vessels. Control Theory Appl. 2011, 28, 907–914. [Google Scholar]
- Chattopadhyay, S.; Roy, G.; Panda, M. Simple Design of a PID Controller and Tuning of Its Parameters Using LabVIEW Software. Sens. Transducers 2011, 129, 69–85. [Google Scholar]
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for Performing Territorial Sea Baseline Measurements in Selected Waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Szot, T.; Dąbrowski, P.; Specht, M. Testing GNSS Receiver Accuracy in Samsung Galaxy Series Mobile Phones at a Sports Stadium. Meas. Sci. Technol. 2020, 31, 064006. [Google Scholar] [CrossRef]
- Hasan, M.; Rouf, R.R.; Islam, S. Investigation of Most Ideal GNSS Framework (GPS, GLONASS and GALILEO) for Asia Pacific Region (Bangladesh). Int. J. Appl. Inf. Syst. 2017, 12, 33–37. [Google Scholar] [CrossRef]
- Protaziuk, E. Geometric Aspects of Ground Augmentation of Satellite Networks for the Needs of Deformation Monitoring. Artif. Satell. 2016, 51, 75–88. [Google Scholar] [CrossRef] [Green Version]
- Jaskólski, K.; Felski, A.; Piskur, P. The Compass Error Comparison of an Onboard Standard Gyrocompass, Fiber-Optic Gyrocompass (FOG) and Satellite Compass. Sensors 2019, 19, 1942. [Google Scholar] [CrossRef] [Green Version]
- Dąbrowski, P.S.; Specht, C.; Felski, A.; Koc, W.; Wilk, A.; Czaplewski, K.; Karwowski, K.; Jaskólski, K.; Specht, M.; Chrostowski, P.; et al. The Accuracy of a Marine Satellite Compass under Terrestrial Urban Conditions. J. Mar. Sci. Eng. 2020, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Felski, A. Exploitative Properties of Different Types of Satellite Compasses. Ann. Navig. 2010, 16, 33–40. [Google Scholar]
- Siejka, Z. Validation of the Accuracy and Convergence Time of Real Time Kinematic Results Using a Single Galileo Navigation System. Sensors 2018, 18, 2412. [Google Scholar] [CrossRef] [Green Version]
- Specht, M.; Specht, C.; Wilk, A.; Koc, W.; Smolarek, L.; Czaplewski, K.; Karwowski, K.; Dąbrowski, P.S.; Skibicki, J.; Chrostowski, P.; et al. Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions. Energies 2020, 13, 3646. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Dąbrowski, P.; Czaplewski, K.; Smolarek, L.; Lewicka, O. Road Tests of the Positioning Accuracy of INS/GNSS Systems Based on MEMS Technology for Navigating Railway Vehicles. Energies 2020, 13, 4463. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | OceanAlpha USV SL20 |
|---|---|
| Hull material | Carbon fiber |
| Dimension | 105 cm × 55 cm × 35 cm |
| Weight | 17 kg |
| Payload | 8 kg |
| Draft | 15 cm |
| Propulsion | water-jet propulsion |
| Communication range | Autopilot: 2 kmRemote Control: 1 km |
| Remote control frequency | 900 MHz/2.4 GHz |
| Data telemetry frequency | 2.4 GHz/5.8 GHz |
| Survey speed | 2–5 kn (1–2.5 m/s) |
| Max speed | 10 kn (5 m/s) |
| Battery | 6 h (1.5 m/s), 1 × 33 V 40 Ah |
| Positioning (standard—not used) | u-blox LEA-6 series |
| Positioning (used in maneuvering) | Leica Viva GNSS GS15 receiver |
| Heading | Honeywell HMC6343 |
| Echosounder | Echologger series SBES |
| Accuracy Measure | Route No. 1 | Route No. 2 | Route No. 3 | Route No. 4 |
|---|---|---|---|---|
| Number of measurements | 571 | 1 092 | 542 | 905 |
| XTE68 | 2.11 m | 1.73 m | 1.46 m | 1.62 m |
| XTE95 | 2.72 m | 2.36 m | 2.13 m | 2.32 m |
| Accuracy Measure | Route No. 1 | Route No. 2 | Route No. 3 | Route No. 4 |
|---|---|---|---|---|
| Number of measurements | 262 | 440 | 249 | 435 |
| XTE68 | 1.43 m | 1.31 m | 1.00 m | 1.16 m |
| XTE95 | 1.99 m | 1.85 m | 2.42 m | 2.28 m |
| Accuracy Measure | Route No. 1 | Route No. 2 | Route No. 3 | Route No. 4 |
|---|---|---|---|---|
| Number of measurements | 159 | 286 | 160 | 281 |
| XTE68 | 1.85 m | 1.57 m | 2.18 m | 1.92 m |
| XTE95 | 2.74 m | 2.44 m | 2.76 m | 2.40 m |
| Accuracy Measure | Route No. 1 | Route No. 2 | Route No. 3 | Route No. 4 |
|---|---|---|---|---|
| Measurement year | 2019 | 2020 | 2019 | 2020 |
| Number of measurements | 458 | 571 | 848 | 1 092 |
| XTE68 | 0.92 m | 2.11 m | 1.15 m | 1.73 m |
| XTE95 | 2.01 m | 2.72 m | 2.38 m | 2.36 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marchel, Ł.; Specht, C.; Specht, M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot. Energies 2020, 13, 5637. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215637
Marchel Ł, Specht C, Specht M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot. Energies. 2020; 13(21):5637. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215637
Chicago/Turabian StyleMarchel, Łukasz, Cezary Specht, and Mariusz Specht. 2020. "Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot" Energies 13, no. 21: 5637. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215637