Assessment of the Condition of Pipelines Using Convolutional Neural Networks

 ,
,
Abstract
:1. Introduction
- The method is integral. Using one or more sensors mounted motionless on the surface of the object, one can monitor the entire object (100% control). This property of the method is especially useful when examining hard-to-reach (inaccessible) surfaces of a controlled pipeline.
- Unlike scanning methods, the acoustic method does not require careful preparation of the surface of the test object. Therefore, the implementation of the control and its results do not depend on the state of the surface and the quality of its processing. The insulation coating (if any) is removed only at the places where the sensors are installed.
- High efficiency and productivity of the method, many times superior to the performance of traditional non-destructive testing methods, such as ultrasonic, radiographic, eddy current and magnetic.
- The ability to control with a significant distance between the operator and the investigated object. This feature of the method allows one to effectively use it to control (monitor) critical large structures, as well as extended or especially dangerous objects without decommissioning and the influence of harmful and dangerous factors on the health of personnel [4].
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Safronchik, V.I. Zashchita Podzemnyh Truboprovodov Antikorrozionnymi Pokrytiyami [Protection of Underground Pipelines with Anti-Corrosion Coatings]; Stroyizdat: Leningrad, Russia, 1977. (In Russian) [Google Scholar]
- Doklad o Sostoyanii Sfery Teploenergetiki i Teplosnabzheniya v Rossijskoj Federacii [Report on the State of Heat Power and Heat Supply in the Russian Federation]. Available online: https://minenergo.gov.ru/view-pdf/10850/80685 (accessed on 20 January 2020).
- Zhukov, A.V.; Kuzmin, A.N.; Styukhin, N.F. Pipeline Inspection by Acoustic Emission Method. NDT World 2009, 1, 29–31. (In Russian) [Google Scholar]
- Xia, Y.; Zhang, C.; Zhou, H.; Hong, W. Mechanical Anisotropy and Failure Characteristics of Columnar Jointed Rock Masses (CJRM) in Baihetan Hydropower Station: Structural Considerations Based on Digital Image Processing Technology. Energies 2019, 12, 3602. [Google Scholar] [CrossRef] [Green Version]
- Zagretdinov, A.R.; Kazakov, R.B.; Mukatdarov, A.A. Control the tightness of the pipeline valve shutter according to the change in the Hurst exponent of vibroacoustic signals. E3S Web Conf. 2019, 124, 03005. [Google Scholar] [CrossRef]
- Krainova, L.N.; Munitsyn, A.I. Prostranstvennye nelinejnye kolebaniya truboprovoda pri garmonicheskom vozbuzhdenii [Three-dimensional non-linear oscillations of the pipeline at harmonic excitation]. Mashinostroenie i Inzhenernoe Obrazovanie Mech. Eng. Eng. Educ. 2010, 2, 46–51. (In Russian) [Google Scholar]
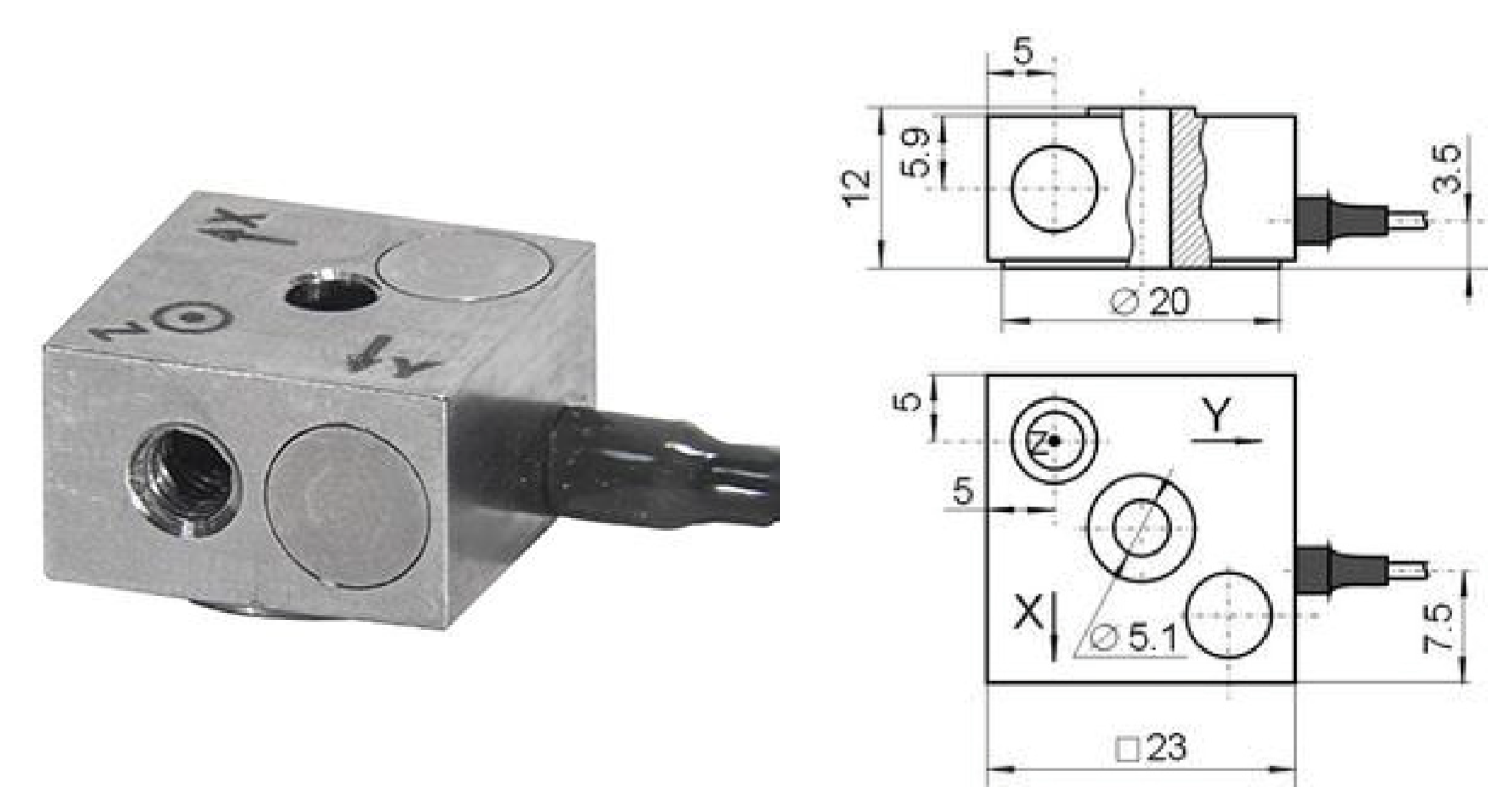
- Vibration Transducer AP2038P-100. Available online: https://globaltest.ru/product/vibropreobrazovatel-ap2038p-100/ (accessed on 20 January 2020).
- Saifullin, E.R.; Zagretdinov, A.R.; Ziganshin, S.G.; Vankov, Y.V. Control of the rotary equipment disbalance by the spectrum of envelope vibroacoustic signal. JARDCS 2018, 10, 2242–2247. [Google Scholar]
- Ziganshin, S.G.; Izmailova, E.V.; Maryashev, A.V. Technique for search of pipeline leakage according to acoustic signals analysis. In Proceedings of the electronic edition of the International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM 2017), St. Petersburg, Russia, 16–19 May 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Vankov, Y.V.; Ziganshin, S.G.; Izmailova, E.V.; Serov, V.V. Determination of the oscillation frequencies of corrosion defects finite element methods in order to develop methods of acoustic monitoring of pipelines. In Proceedings of the IOP Conference Series: Materials Science and Engineering, International Scientific and Technical Conference “Innovative Mechanical Engineering Technologies, Equipment and Materials-2014” (ISC IMETEM 2014), Kazan, Russia, 3–5 December 2014; IOP Publishing: Bristol, UK, 2015. [Google Scholar] [CrossRef]
- Saifullin, E.R.; Ziganshin, S.G.; Vankov, Y.V.; Zagretdinov, A.R. Assessment of technical condition of polyurethane foam thermal insulation pipelines of heating networks using neural network technologies. IJET 2018, 7, 241–244. [Google Scholar] [CrossRef] [Green Version]
- Saifullin, E.R.; Ziganshin, S.G.; Vankov, Y.V.; Serov, V.V. Neural network analysis of vibration signals in the diagnostics of pipelines. J. Fundament. Appl. Sci. 2017, 9, 1139–1151. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G.E. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, R.K.; Greff, K.; Schmidhuber, J. Training very deep networks. In Proceedings of the 29th Annual Conference on Neural Information Processing Systems, Montreal, Canada, 7–12 December 2015; pp. 2377–2385. [Google Scholar]
- LeCun, Y.; Kavukcuoglu, K.; Farabet, C. Convolutional networks and applications in vision. In Proceedings of the 2010 IEEE International Symposium, Circuits and Systems (ISCAS), Paris, France, 30 May–2 June 2010; Volume 201, pp. 253–256. [Google Scholar]
- Jarrett, K.; Kavukcuoglu, K.; Ranzato, M.A.; LeCun, Y. What is the best multi-stage architecture for object recognition? In Proceedings of the International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2146–2153. [Google Scholar]
- Qian, P.; Tian, X.; Kanfoud, J.; Lee, J.L.Y.; Gan, T.-H. A Novel Condition Monitoring Method of Wind Turbines Based on Long Short-Term Memory Neural Network. Energies 2019, 12, 3411. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Hu, W.; Cao, D.; Zhang, B.; Huang, Q.; Chen, Z.; Blaabjerg, F. An Imbalance Fault Detection Algorithm for Variable-Speed Wind Turbines: A Deep Learning Approach. Energies 2019, 12, 2764. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Wu, X.; Liu, Q.; Liu, J.; Yang, X. Fault Simulation and Online Diagnosis of Blade Damage of Large-Scale Wind Turbines. Energies 2019, 12, 522. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 4278–4284. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, D.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Sutskever, I.; Martens, J.; Dahl, G.; Hinton, G. On the Importance of Momentum and Initialization in Deep Learning. In Proceedings of the 30th International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013; Volume 28, pp. 1139–1147. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; Volume 37, pp. 448–456. [Google Scholar]
- Pinto, N.; Cox, D.D.; DiCarlo, J.J. Why is real-world visual object recognition hard? PLoS Comp. Biol. 2008, 4, 27. [Google Scholar] [CrossRef] [PubMed]
- Serre, T.; Wolf, L.; Poggio, T. Object recognition with features inspired by visual cortex. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 994–1000. [Google Scholar]
- Duchi, J.; Hazan, E.; Singer, Y. Adaptive subgradient methods for online learning and stochastic optimization. J. Mach. Learn. Res. 2011, 12, 2121–2159. [Google Scholar]
- Lee, C.Y.; Gallagher, P.W.; Tu, Z. Generalizing pooling functions in convolutional neural networks: Mixed, gated, and tree. In Proceedings of the 18th International Conference on Artificial Intelligence and Statistics, Cadiz, Spain, 9–11 May 2016; pp. 464–472. [Google Scholar]
- Minyazev, R.S.; Rumyantsev, A.A.; Dyganov, S.A.; Baev, A.A. X-ray Image Analysis for the Neural Network-Based Detection of Pathology. Bull. Russ. Acad. Sci. Phys. 2018, 82, 1529–1531. [Google Scholar] [CrossRef]
- Nellore, S.B. Various performance measures in Binary classification—An Overview of ROC study. Int. J. Innov. Sci. Eng. Technol. 2015, 2, 596–605. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
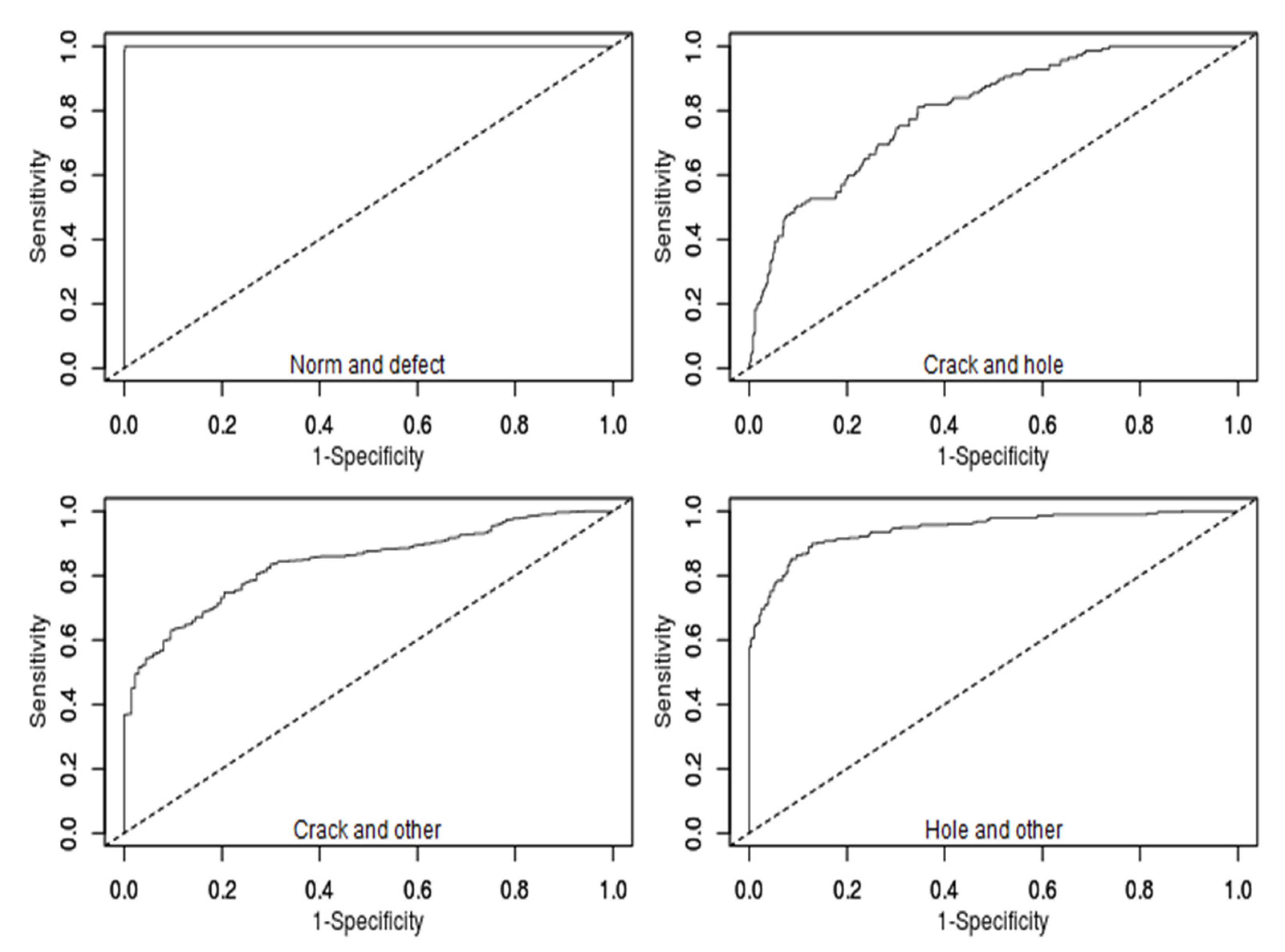
| Criterion | “Norm” and “Defect” | “Crack” and “Hole” | “Crack” and “Others” | “Hole” and “Others” |
|---|---|---|---|---|
| TP (Sensitivity) | 0.993 | 0.810 | 0.796 | 0.861 |
| FP | 0.025 | 0.345 | 0.253 | 0.097 |
| TN (Specificity) | 0.975 | 0.655 | 0.747 | 0.903 |
| FN | 0.007 | 0.190 | 0.204 | 0.139 |
| PPV | 0.903 | 0.387 | 0.395 | 0.899 |
| NPV | 0.998 | 0.928 | 0.946 | 0.865 |
| PLR | 40.168 | 0.426 | 3.144 | 8.830 |
| NLR | 0.007 | 3.451 | 0.274 | 0.154 |
| AUC (Area Under the Curve) | 0.999 | 0.802 | 0.839 | 0.943 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vankov, Y.; Rumyantsev, A.; Ziganshin, S.; Politova, T.; Minyazev, R.; Zagretdinov, A. Assessment of the Condition of Pipelines Using Convolutional Neural Networks. Energies 2020, 13, 618. https://0-doi-org.brum.beds.ac.uk/10.3390/en13030618
Vankov Y, Rumyantsev A, Ziganshin S, Politova T, Minyazev R, Zagretdinov A. Assessment of the Condition of Pipelines Using Convolutional Neural Networks. Energies. 2020; 13(3):618. https://0-doi-org.brum.beds.ac.uk/10.3390/en13030618
Chicago/Turabian StyleVankov, Yuri, Aleksey Rumyantsev, Shamil Ziganshin, Tatyana Politova, Rinat Minyazev, and Ayrat Zagretdinov. 2020. "Assessment of the Condition of Pipelines Using Convolutional Neural Networks" Energies 13, no. 3: 618. https://0-doi-org.brum.beds.ac.uk/10.3390/en13030618