In this section, the working principle of the GTDS is provided in terms of the mathematics and thermodynamics including the lumped-parameter model and the control model, which may contribute to a better understanding of the function and dynamic characteristics of the system.
2.2.1. Lumped-Parameter Model
As illustrated in
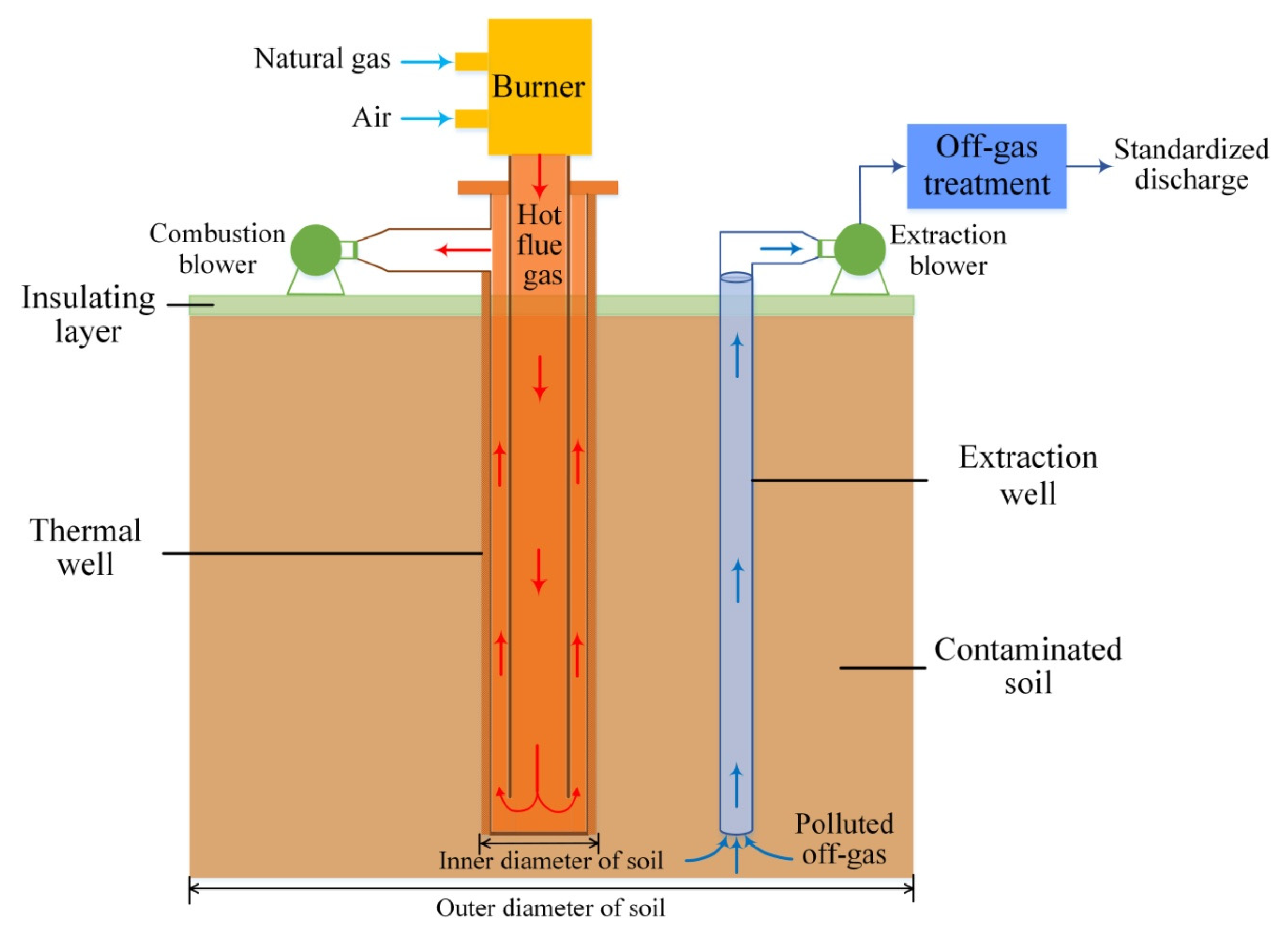
Figure 4a, a dynamic heat-transfer model based on the lumped-parameter method for the GTDS is proposed to investigate the thermal performance of the system in detail. In accordance with layout of the GTDS in
Figure 1, the burner, the inner pipe of the heat well, the outer pipe of the heat well and the heated soil can be treated as four lumped-parameter nodes respectively, which will be fully described afterwards in this section.
1. Model of Burner
The schematic diagram of the burner is depicted in
Figure 4b. Based on the energy conservation principle, the temperature dynamics of the burner can be expressed by [
35,
36]:
where
mb is the mass of the burner;
tb and
t0 are the temperature of the burner and the ambient temperature;
Gg,
Ga and
Gf are the mass flow rates of the natural gas, the air and the flue gas respectively;
Lg is the volume flow rate of the natural gas;
QL is low heating value of the natural gas;
Rb is thermal resistance between the burner wall and burner crick;
hg,
ha and
hf are the enthalpies of the natural gas, the air and the flue gas which can be written as:
where
tb,
tg and
ta are the temperatures of the burner, the natural gas and the air respectively;
cg,
ca and
cf are the specific heat of the natural gas, the air and the high temperature flue gas respectively. Thereby,
cf can be calculated by:
where
gi is mass fraction of the flue gas,
cfi is mass specific heat of components of the flue gas; the output flue gas temperature from the burner
tf can be expressed by:
where
ηb is the heat exchange efficiency of the burner.
In addition,
Ga and
Gf are given by Equations (5) and (6) respectively, where
V0 is theoretical volume of the air for complete combustion of the natural gas,
is excess air coefficient.
2. Model of Thermal Well
Figure 4c illustrates individual temperature points of the heat well. The temperature dynamics of the inner pipe and outer pipe of the thermal well, which are based on the energy conservation principle, are represented by Equations (7)–(8) [
31,
37]:
where
mW1 and
mW2 are the mass of the inner pipe and outer pipe;
tW1,
tW2 and
ts are the temperatures in Celsius of the inner pipe, the outer pipe and the heated soil respectively;
TW1 and
TW2 are Kelvin temperatures of the inner pipe and outer pipe;
tfi1 and
tfi2 are the input temperatures of the flue gas that flows into the inner pipe and the outer pipe;
cW1 and
cW2 are the specific heat of the inner pipe and outer pipe;
ηW is the heat-exchange efficiency of the thermal well;
RWs is thermal resistance between the outer pipe and the soil;
C0 is the black-body radiation coefficient;
A1 and
A2 are surface area of the inner pipe and outer pipe;
ε1 and
ε2 are the emissivity of the inner pipe and outer pipe;
εa is the system emissivity which is defined in Equation (9) [
38].
Equations (10) and (11) present the output flue gas temperatures from the inner pipe (
tfo1) and that from the outer pipe (
tfo2) respectively. As clearly depicted in
Figure 4c,
tfo1 is actually the input flue gas temperature of the outer pipe (
tfi2), which is expressed by Equation (12).
3. Model of Heated Soil
For simplicity, some assumptions are made as follows:
- (1)
The soil is homogeneous porous medium and there is no chemical interaction in the soil.
- (2)
Solid, liquid, and gas phases are separately continuous in unsaturated soil.
- (3)
Natural convection of fluids in the soil satisfies Darcy’s law.
- (4)
The target site is considered as one of the unit blocks and each block is heated by a thermal well individually. There is no heat exchange between the heated site and the surrounding sites at the boundary.
- (5)
There is no moisture transfer between the target heated site and the surrounding heated sites, moreover, the moisture transfer mainly occurs between the heated soil and the underlying unheated soil.
- (6)
The influence of gravity on the soil moisture transfer in the unsaturated soil is assumed to be negligible.
- (7)
The pressure inside the soil is evenly distributed.
- (8)
The gases in the soil are assumed to be ideal.
(a) Liquid flow model
Based on the mass conservation principle, the VWC variation Equation [
39] can be written as:
where
θs is the VWC of the soil,
ρw is density of liquid water,
Vs is volume of the soil,
mwv represents mass of vaporized liquid water, and
mwi denotes mass of liquid water flowing vertically into the heated soil [
40] which is given by:
where
Acs is the migration area of liquid water in the vertical direction,
Jwi is the liquid water migration flux density.
A lot of research [
41,
42,
43,
44] has shown that water seepage in the unsaturated soil is primarily caused by the temperature gradient and the moisture gradient. The liquid water migration flux density
Jwi can be expressed by Equation (15) in line with Assumptions (5)–(6),
where
ts is temperature of the heated soil,
Dwt and
Dwθ are the mass diffusivities of the liquid water in soil caused by temperature gradient and moisture gradient respectively;
l is the transfer distance of the liquid water in the vertical direction,
Kw is the hydraulic conductivity of the soil [
45,
46] which is defined by:
ε is the void ratio of the soil,
Kws is saturated hydraulic conductivity,
b is the characteristic coefficient of the soil.
(b) Vapor flow model
Likewise, on the basis of mass conservation principle, the mass equation of vapor can be written as:
where
Vvs is vapor volume in the soil,
ρv is density of vapor water,
mvo is mass of vapor water extracted into the extraction well which is defined by:
where
Ne is the power of the extraction blower,
Peo is the outlet pressure of the extraction blower,
Rv is the gas constant of vapor water,
Tv is Kelvin temperature of the vapor water.
Based on Assumption (7), provided that the volume of vapor in the soil pores
Vvs and that in the extraction well
Vv_e are considered as a whole, the pressure variation equation can be derived from Equations (17) and (18) that:
(c) Heat-Flow Model
As presented in
Figure 5, the temperature dynamics of the soil [
31,
33] can be expressed by:
where
QW is heating power of the thermal well;
Qup and
Qdown are heat leakage between the heated site and the insulating layer, as well as that between the heated site and the underlying unheated soil;
QW,
Qup and
Qdown can be calculated by:
Qw and
Qv represent the heat flux of liquid water migration and vapor water extraction respectively which can be given by:
where
hw and
hv are specific enthalpy of liquid water and vaporous water,
mwi and
mvo can be calculated by Equations (14) and (18).
Qeva indicates the energy absorbed by liquid water evaporation which is defined by:
where
H is latent heat of evaporation.
2.2.2. Fluid-Flow Model
As shown in
Figure 6, the overall flow resistance network of the gaseous fluids for the GTDS is a non-linear parallel and series flow network which can be expressed in detail by the following equations. Specifically, the fluid flow network comprises of the inlet natural gas pipe and inlet air pipe which are connected in parallel, as well as the burner wall, the heat well inner pipe, the heat well outer pipe and the flue gas outlet pipe which are associated in series. When the gaseous fluids such as natural gas, air and flue gas flow through the above channels, there exist flow resistances correspondingly which can be expressed by Equation (24) [
47], where
μ is the fluid viscosity,
l is the channel length,
ξ is the equivalent coefficient of channel length considering the bend and corner [
48].
Given the flow resistance of the inlet natural gas pipe
Rg and that of the inlet air pipe
Ra calculated from Equation (24), the parallel flow resistance
Rpar [
49,
50] can be presented by Equation (25), where
ϕg and
ϕa characterize the valve opening of the inlet natural gas pipe and air pipe. After that, the overall flow resistance
Rnet is proposed in Equation (26) where
Rb,
Rwi,
Rwo and
Rpo are the flow resistances corresponding to each series branches as expressed in
Figure 6.
For a given pressure difference Δ
Pc defined in Equation (27), where
Pci and
Pco denote the inlet pressure and outlet pressure of the combustion blower respectively, the mass flow rate of flue gas through the fluid loop
Gf can be written as Equation (28).
According to Equations (5) and (6), the natural gas mass flow rate
Gg and the air mass flow rate
Ga can be separately expressed by Equations (29) and (30), correspondingly. Furthermore, the natural gas inlet pressure
Pg and the air inlet pressure
Pa can be obtained by Equations (31) and (32), where
Pb is inlet pressure of the burner.
2.2.4. Simulation Condition Settings
Related parameter determinations of the GTDS and the original state of the system are summarized in
Table A2 in
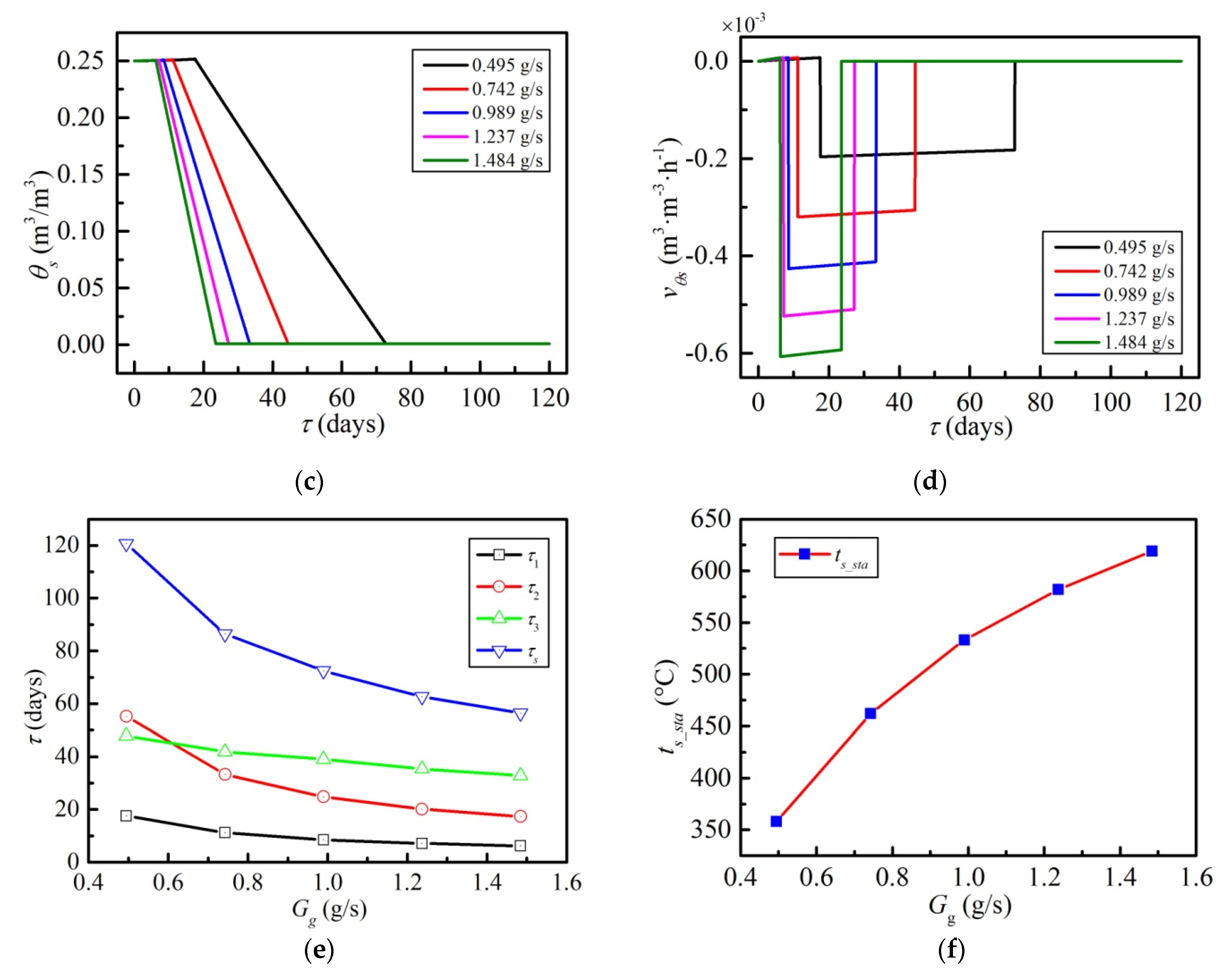
Appendix B. The mass flow rate of the natural gas (
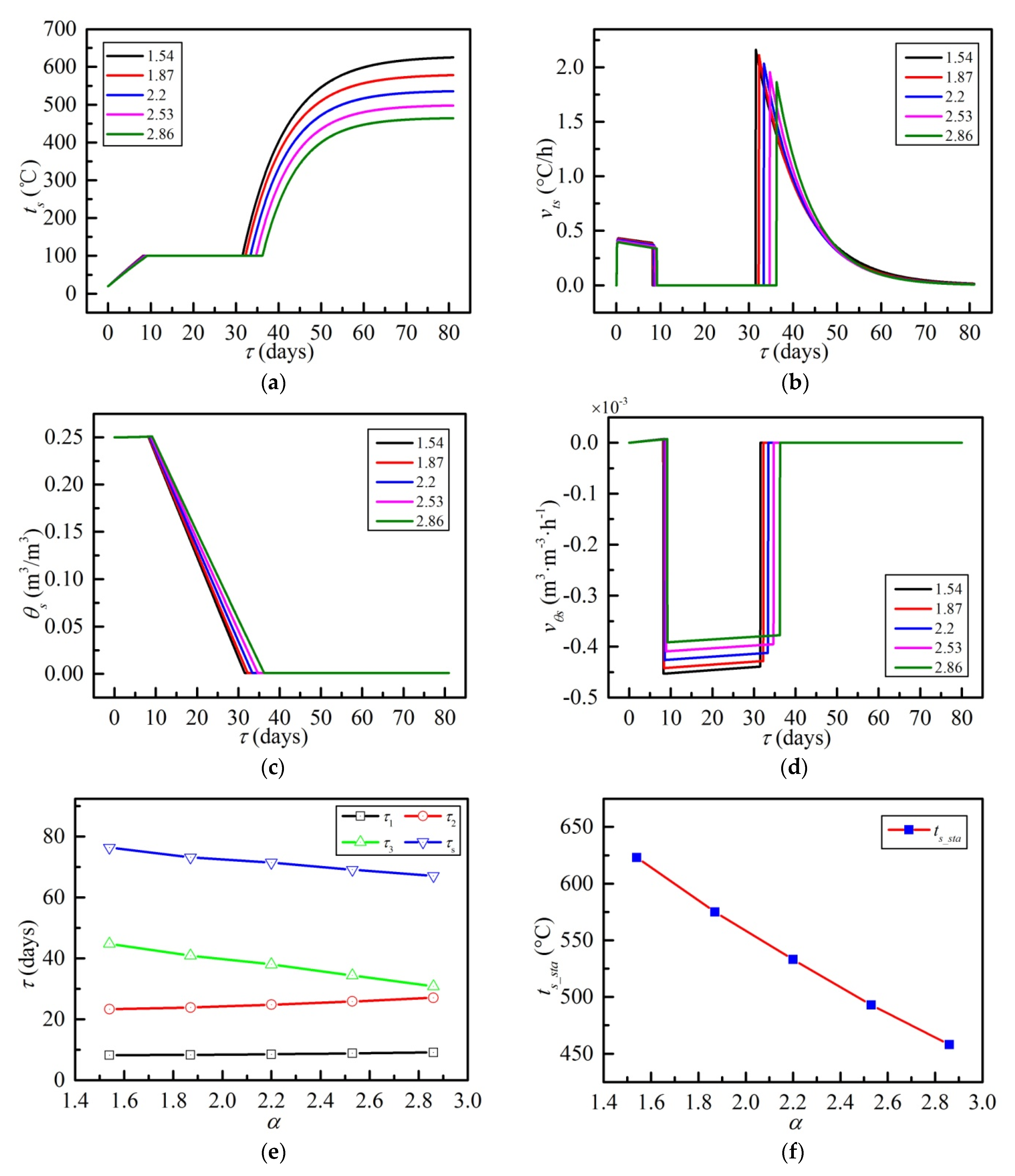
Gg) and excess air coefficient (
α) are two primary input variables which will be changed and controlled throughout the simulation process. As the base line for transient performance and control effect analyses, the initial
Gg is 0.989 × 10
−3 kg/s, and the initial
α is 2.2.
Matlab R2017a was used as the simulation software. The flowchart of the simulation process is illustrated in
Figure 8 which can be described in detail as follows: (1) the program is initialized at the beginning in accordance with the parameters tabulated in
Table A2. (2) The simulation time and the calculation step are set. (3) Initial parameters are provided. (4) The desired values of
,
and
are derived. (5) The actual values of
vts1,
vts2 and
vts3 can be obtained by Equations (1)–(23) and Equation (33). (6) During the closed-loop control, the control errors
e1,
e2 and
e3 can be calculated by Equation (34) firstly; and then
Gg can be adjusted according to Equation (35). (7) After all the above procedures, two judgments need to be made. The first judgment is whether the control objective is convergence. If no, the simulation process will be updated by the new control parameters. If the first judgment is yes, the simulation continues to the second judgment, which is whether the simulation will continue. If the second judgment is yes, the simulation will jump to step (2). If the second judgment is no, the simulation will end.
For investigating the effects of various input variables on the heating performance of the target soil, two simulation conditions are organized and listed in
Table 1. Two simulation conditions are organized and listed in
Table 1. To be specific, various step disturbances in the input
Gg and
α take place to demonstrate the influence of the natural gas mass flow rate and the excess air coefficient upon the soil’s heating characteristics.
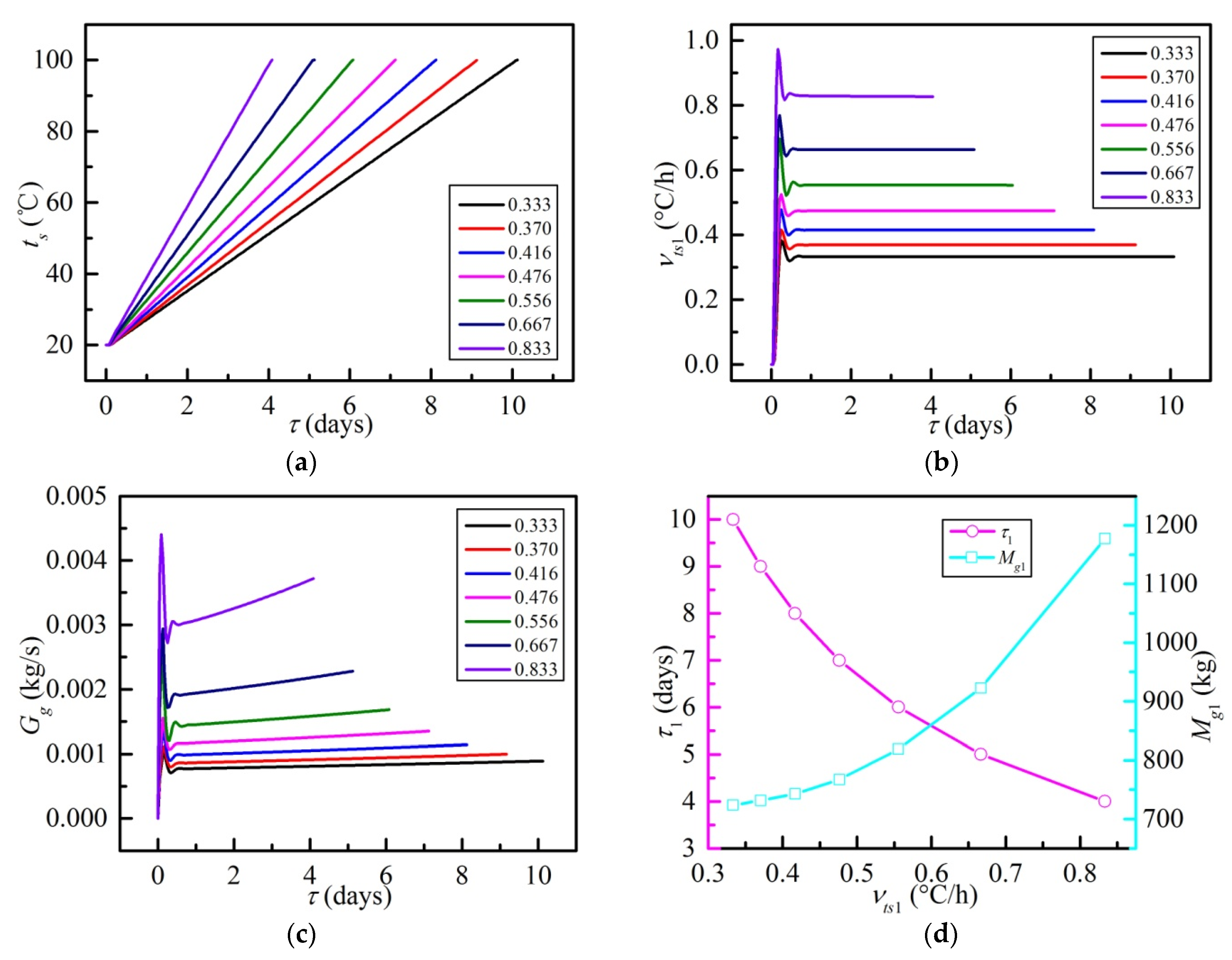
Given a fixed temperature variation or VWC variation, the desired temperature change rate (
) or desired VWC change rate (
) vary with the heating time at different phases. For the purpose of investigating the influence of
or
on the system performances, simulation conditions for each phase are offered in
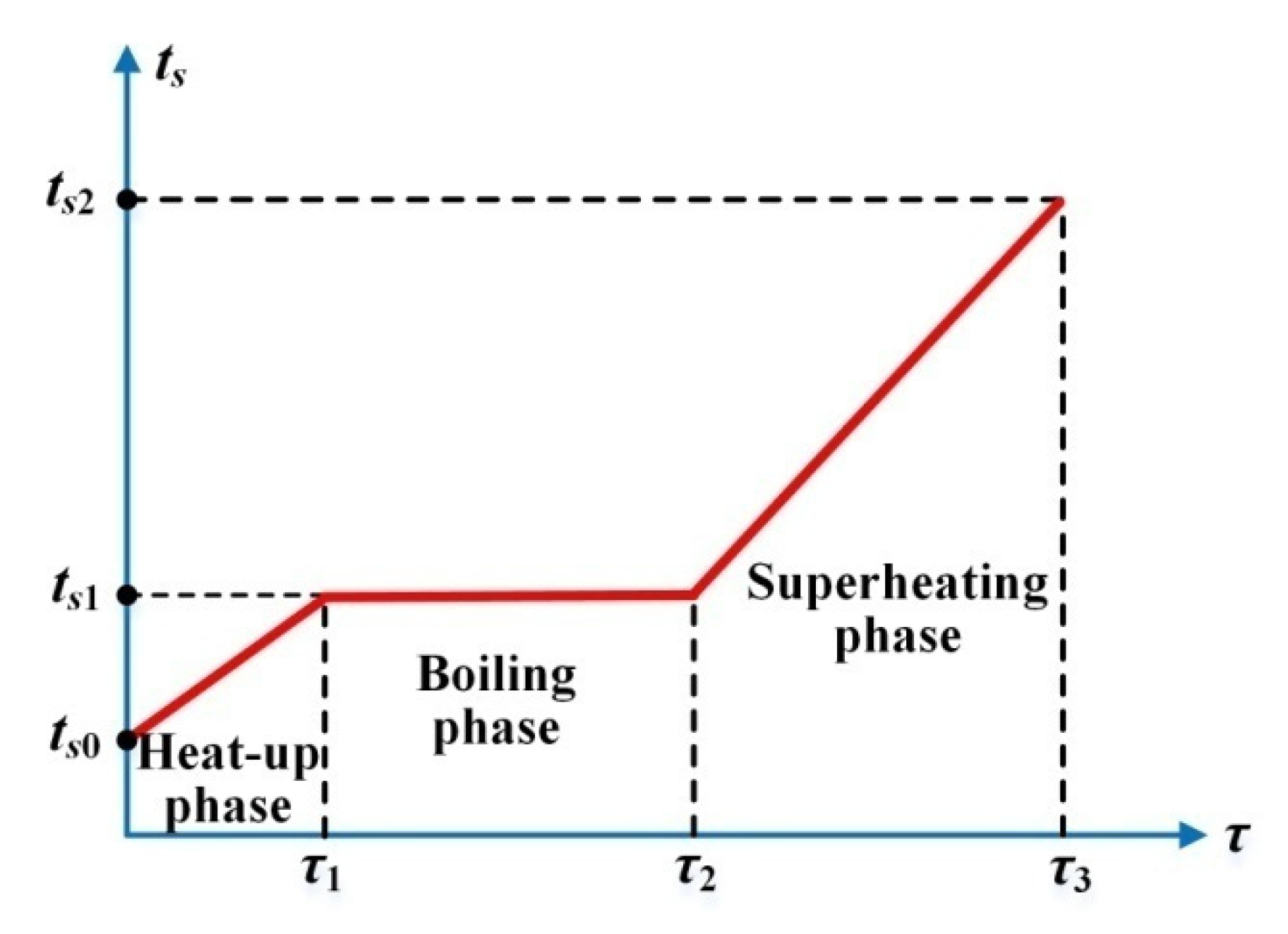
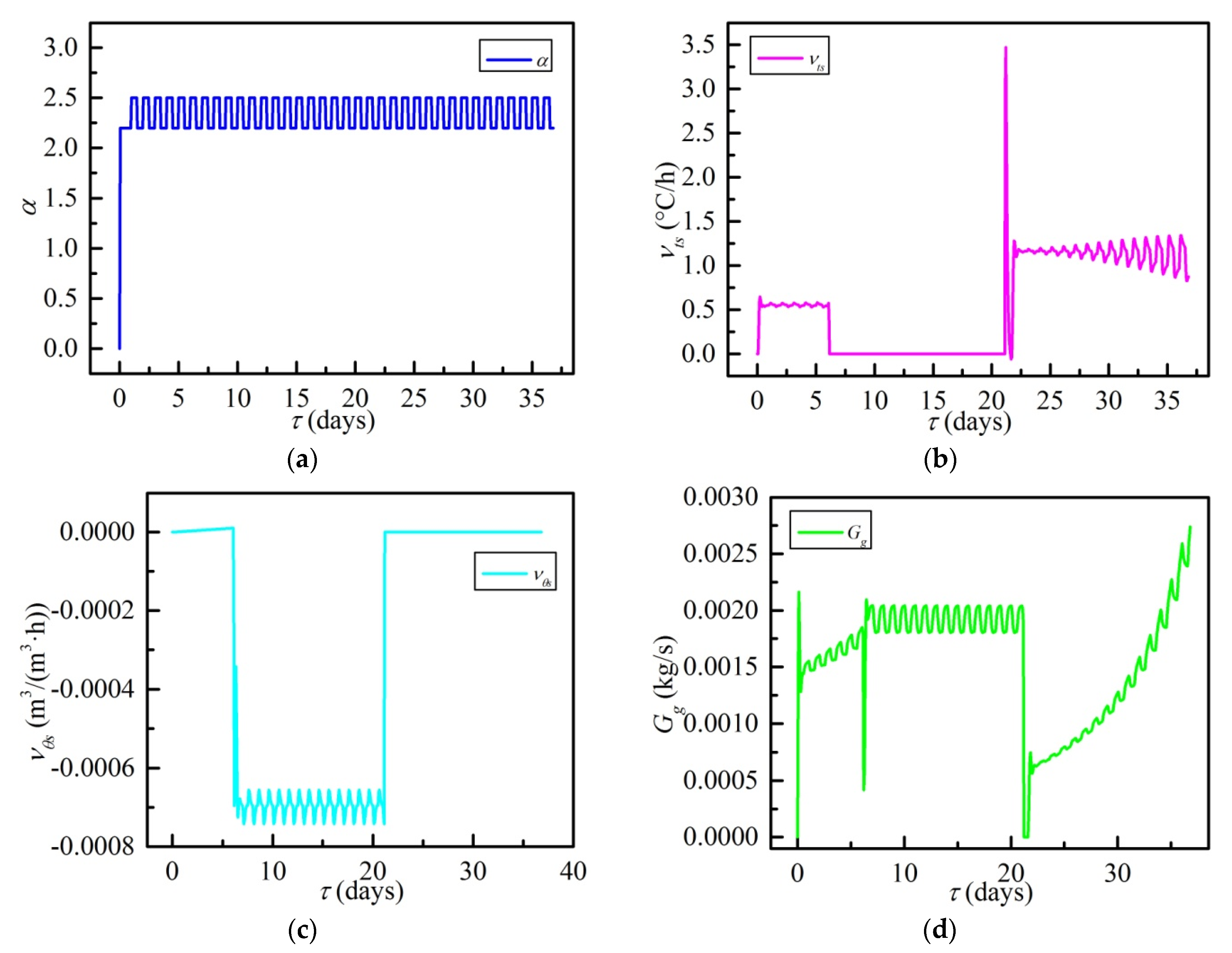
Table 2. It is worth noting that the initial temperature and the objective temperature of soil are assumed to be 20 °C and 525 °C, respectively, which leads to the temperature change of Phase-1 being 80 °C and that of Phase-3 being 425 °C. Moreover, considering an original VWC of 0.25 m
3/m
3 and the VWC increment of 0.0005 m
3/m
3 in Phase-1, the VWC variation of Phase-2 is −0.2505 m
3/m
3. Determinations of relevant PID parameters are summarized in
Table 3.
In addition, to investigate the performance in rejecting disturbances of the controller, two cases are arranged and listed in
Table 4.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















