LCC-S Based Discrete Fast Terminal Sliding Mode Controller for Efficient Charging through Wireless Power Transfer

 ,
,
Abstract
:1. Introduction
- DC voltage source.
- DC/high-frequency AC inverter.
- Compensation networks.
- Transmitting and receiving coils.
- Rectifier.
- Regulatory circuitry.
2. Analysis of the LCC-S Compensation Network
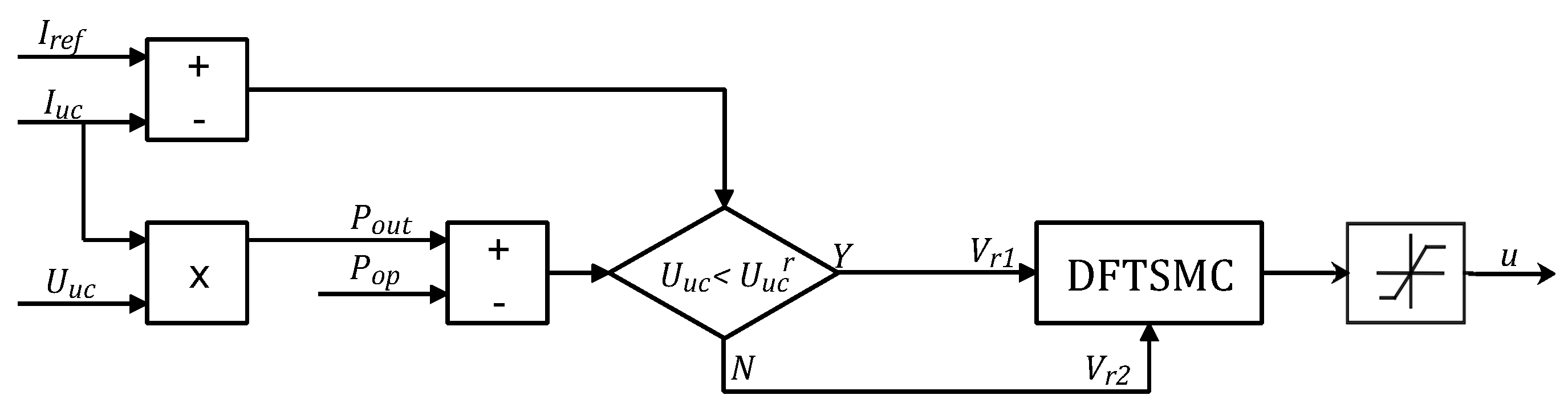
3. Discrete Fast Terminal Sliding Mode Controller Design for the Buck Converter
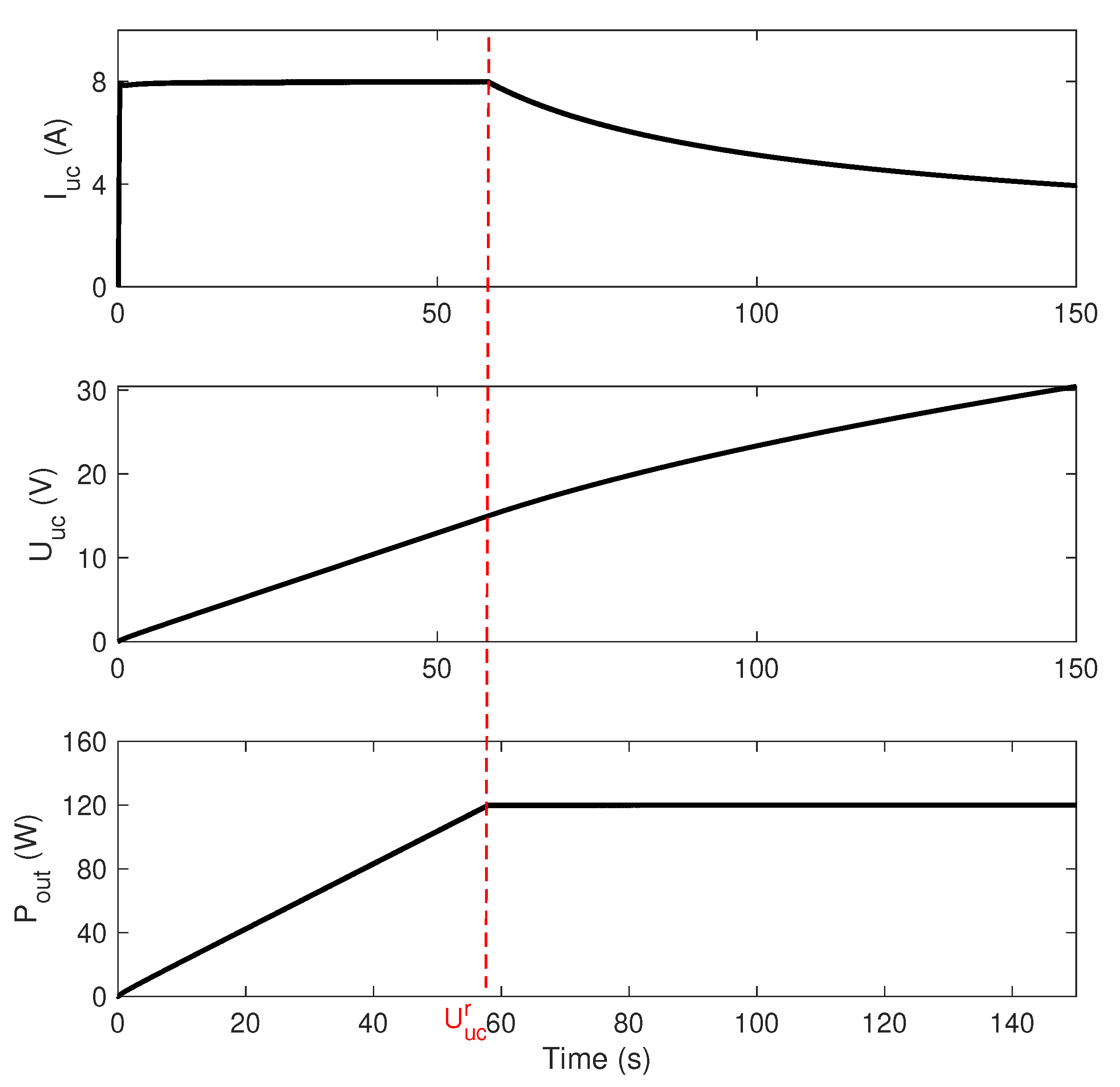
4. Results and Discussion
Comparison with Other Control Schemes
5. Experimental Validation
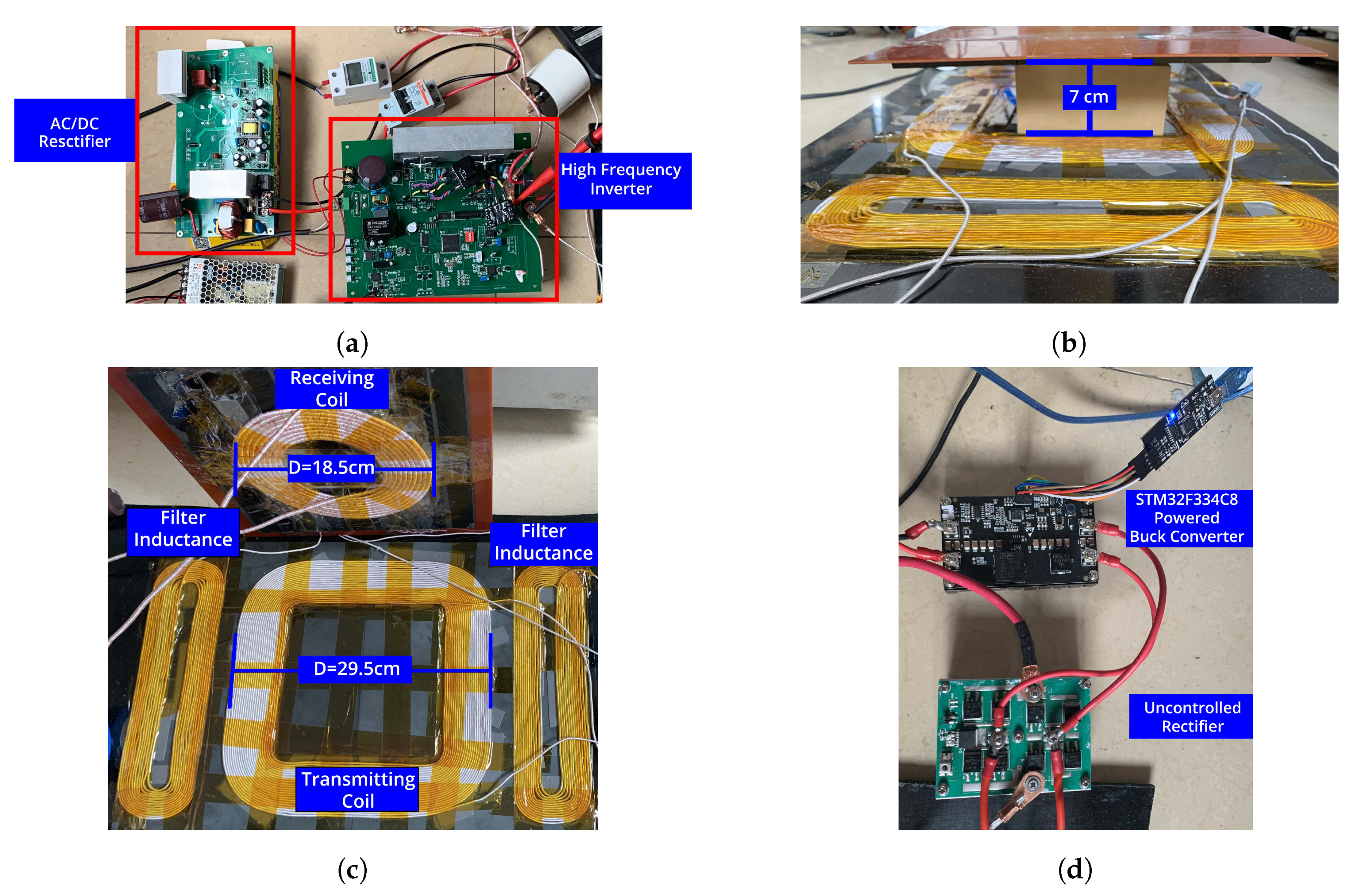
5.1. Experimental Setup
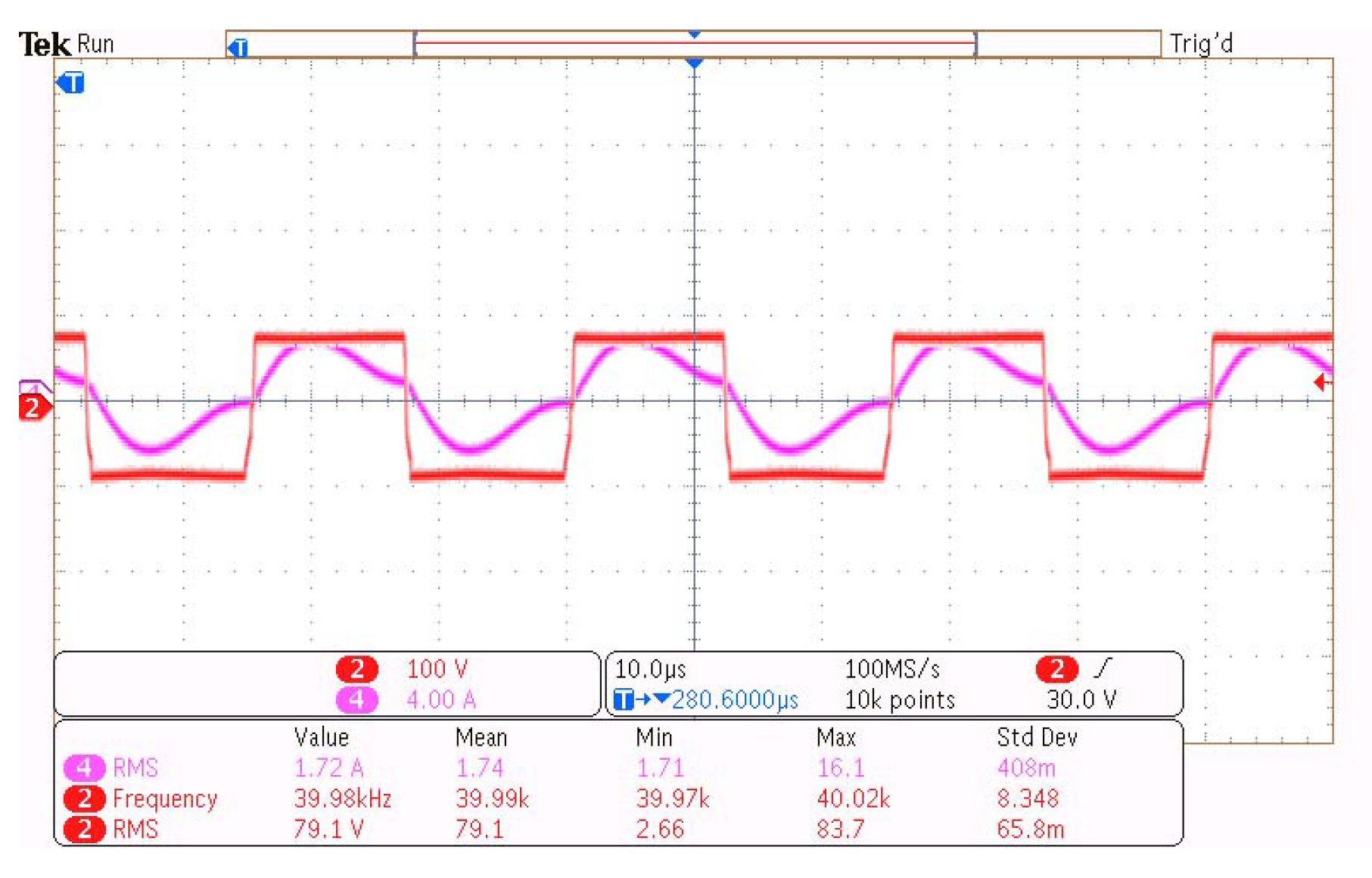
5.2. Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| WPT | Wireless power transfer |
| RIPT | Resonant inductive power transfer |
| CWPT | Capacitive wireless power transfer |
| EMR | Electromagnetic radiation |
| AWPT | Acoustic wireless power transfer |
| OWPT | Optical wireless power transfer |
| SMC | Sliding mode controller |
| PID | Proportional-integral-derivative |
| DFTSMC | Discrete fast terminal sliding mode controller |
| SOC | State of charge |
| SS | Series-series |
| SP | Series-parallel |
| PS | Parallel-series |
| PP | Parallel-parallel |
| LCC | inductor-capacitor-capacitor |
References
- Tesla, N. Apparatus for Transmitting Electrical Energy. US Patent 1,119,732, 1 December 1914. [Google Scholar]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless Charging Technologies: Fundamentals, Standards, and Network Applications. IEEE Commun. Surv. Tutor. 2016, 18, 1413–1452. [Google Scholar] [CrossRef] [Green Version]
- Barth, H.; Jung, M.; Braun, M.; Schmülling, B.; Reker, U. Concept evaluation of an inductive charging system for electric vehicles. In Proceedings of the 3rd European Conference Smart Grids and E-Mobility, Munich, Germany, 17–18 October 2011. [Google Scholar]
- Hui, S.Y.R.; Zhong, W.; Lee, C.K. A Critical Review of Recent Progress in Mid-Range Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 4500–4511. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Niyato, D.; Wang, P.; Kim, D.I.; Han, Z. Wireless charger networking for mobile devices: Fundamentals, standards, and applications. IEEE Wirel. Commun. 2015, 22, 126–135. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Chen, Y.; Madawala, U.K.; Thrimawithana, D.J.; Ma, H. A New Controller for Bidirectional Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2018, 33, 9076–9087. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Mi, C. A Two-Plate Capacitive Wireless Power Transfer System for Electric Vehicle Charging Applications. IEEE Trans. Power Electron. 2018, 33, 964–969. [Google Scholar] [CrossRef]
- RamRakhyani, A.K.; Mirabbasi, S.; Chiao, M. Design and Optimization of Resonance-Based Efficient Wireless Power Delivery Systems for Biomedical Implants. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 48–63. [Google Scholar] [CrossRef] [PubMed]
- Xue, R.; Cheng, K.; Je, M. High-Efficiency Wireless Power Transfer for Biomedical Implants by Optimal Resonant Load Transformation. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 867–874. [Google Scholar] [CrossRef]
- Mashhadi, I.A.; Pahlevani, M.; Hor, S.; Pahlevani, H.; Adib, E. A New Wireless Power Transfer Circuit for Retinal Prosthesis. IEEE Trans. Power Electron. 2019, 34, 6425–6439. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Chen, K. Frequency Decrease Analysis of Resonant Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 1058–1063. [Google Scholar] [CrossRef]
- Roes, M.G.; Duarte, J.L.; Hendrix, M.A.; Lomonova, E.A. Acoustic energy transfer: A review. IEEE Trans. Ind. Electron. 2012, 60, 242–248. [Google Scholar] [CrossRef]
- Dai, J.; Ludois, D.C. Wireless electric vehicle charging via capacitive power transfer through a conformal bumper. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 3307–3313. [Google Scholar] [CrossRef]
- Dai, H.; Liu, Y.; Chen, G.; Wu, X.; He, T.; Liu, A.X.; Ma, H. Safe Charging for Wireless Power Transfer. IEEE/ACM Trans. Netw. 2017, 25, 3531–3544. [Google Scholar] [CrossRef]
- Dickinson, R.M. Wireless power transmission technology state of the art the first Bill Brown lecture. Acta Astronaut. 2003, 53, 561–570. [Google Scholar] [CrossRef]
- Sahai, A.; Graham, D. Optical wireless power transmission at long wavelengths. In Proceedings of the 2011 International Conference on Space Optical Systems and Applications (ICSOS), Santa Monica, CA, USA, 11–13 May 2011; pp. 164–170. [Google Scholar]
- Tseng, V.F.-G.; Bedair, S.S.; Lazarus, N. Phased array focusing for acoustic wireless power transfer. IEEE Trans. Ultrasonics Ferroelectrics Frequency Control. 2017, 65, 39–49. [Google Scholar] [CrossRef] [PubMed]
- Awal, M.R.; Jusoh, M.; Sabapathy, T.; Kamarudin, M.R.; Rahim, R.A. State-of-the-art developments of acoustic energy transfer. Int. J. Antennas Propag. 2016, 2016, 3072528. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Mi, C.C. Wireless power transfer for electric vehicle applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Qiu, C.; Chau, K.T.; Ching, T.W.; Liu, C. Overview of wireless charging technologies for electric vehicles. J. Asian Electr. Veh. 2014, 12, 1679–1685. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.S.; Stielau, O.H.; Covic, G.A. Design considerations for a contactless electric vehicle battery charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- Kalwar, K.A.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B. Coil design for high misalignment tolerant inductive power transfer system for EV charging. Energies 2016, 9, 937. [Google Scholar] [CrossRef] [Green Version]
- Cirimele, V.; Freschi, F.; Guglielmi, P. Wireless power transfer structure design for electric vehicle in charge while driving. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 2461–2467. [Google Scholar]
- Spanik, P.; Frivaldsky, M.; Drgona, P.; Jaros, V. Analysis of proper configuration of wireless power transfer system for electric vehicle charging. In Proceedings of the ELEKTRO 2016, Strbske Pleso, Slovakia, 16–18 May 2016; pp. 231–237. [Google Scholar]
- Geng, Y.; Li, B.; Yang, Z.; Lin, F.; Sun, H. A high efficiency charging strategy for a supercapacitor using a wireless power transfer system based on inductor/capacitor/capacitor (LCC) compensation topology. Energies 2017, 10, 135. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Wang, K.; Chen, W.; Yang, X. A maximum efficiency point tracking control scheme for wireless power transfer systems using magnetic resonant coupling. IEEE Trans. Power Electron. 2014, 30, 3998–4008. [Google Scholar] [CrossRef]
- Li, B.; Geng, Y.; Lin, F.; Yang, Z.; Igarashi, S. Design of constant voltage compensation topology applied to wpt system for electrical vehicles. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016; pp. 1–6. [Google Scholar]
- Li, Z.; Zhu, C.; Jiang, J.; Song, K.; Wei, G. A 3-kW wireless power transfer system for sightseeing car supercapacitor charge. IEEE Trans. Power Electron. 2016, 32, 3301–3316. [Google Scholar] [CrossRef]
- Zhong, W.; Hui, S. Maximum energy efficiency tracking for wireless power transfer systems. IEEE Trans. Power Electron. 2014, 30, 4025–4034. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhong, W.; Kiratipongvoot, S.; Tan, S.C.; Hui, S.Y.R. Dynamic improvement of series–series compensated wireless power transfer systems using discrete sliding mode control. IEEE Trans. Power Electron. 2017, 33, 6351–6360. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhuo, S.; Rathore, A.; Breaz, E.; Nahid-Mobarakeh, B.; Gao, F. Super-twisting differentiator-based high order sliding mode voltage control design for DC-DC buck converters. Energies 2016, 9, 494. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.-X.; Abidi, K. Output Tracking with Discrete-Time Integral Sliding Mode Control. In Modern Sliding Mode Control Theory: New Perspectives and Applications; Bartolini, G., Fridman, L., Pisano, A., Usai, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 247–268. [Google Scholar]
- Lu, F.; Zhang, H.; Hofmann, H.; Su, W.; Mi, C.C. A dual-coupled LCC-compensated IPT system with a compact magnetic coupler. IEEE Trans. Power Electron. 2017, 33, 6391–6402. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Input voltage | 80 V | |
| Transmitting coil inductance | 400 μH | |
| Transmitting coil resistance | ∼300 mΩ | |
| Receiving coil inductance | 30 μH | |
| Receiving coil resistance | ∼120 mΩ | |
| M | Mutual inductance | 60 μH |
| Switching frequency | 40 kHz | |
| Output power | 120 Watts | |
| Output current | 5 A |
| Symbol | Parameter | Value |
|---|---|---|
| Transmitting side compensation inductance | 135 μH | |
| Transmitting side parallel compensation capacitance | 0.117 μF | |
| Transmitting side series compensation capacitance | 0.059 μF | |
| Transmitting side compensation inductor resistance | 200 mΩ | |
| Receiving side series compensation capacitance | 0.52 μF |
| Symbol | Parameter | Value |
|---|---|---|
| L | Inductor | 5 mH |
| C | Capacitor | 500 μF |
| Constant | 500 | |
| Constant | 3000 | |
| h | Sampling period | 1 ms |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, N.; Liu, Z.; Hou, Y.; Armghan, H.; Wei, X.; Armghan, A. LCC-S Based Discrete Fast Terminal Sliding Mode Controller for Efficient Charging through Wireless Power Transfer. Energies 2020, 13, 1370. https://0-doi-org.brum.beds.ac.uk/10.3390/en13061370
Ali N, Liu Z, Hou Y, Armghan H, Wei X, Armghan A. LCC-S Based Discrete Fast Terminal Sliding Mode Controller for Efficient Charging through Wireless Power Transfer. Energies. 2020; 13(6):1370. https://0-doi-org.brum.beds.ac.uk/10.3390/en13061370
Chicago/Turabian StyleAli, Naghmash, Zhizhen Liu, Yanjin Hou, Hammad Armghan, Xiaozhao Wei, and Ammar Armghan. 2020. "LCC-S Based Discrete Fast Terminal Sliding Mode Controller for Efficient Charging through Wireless Power Transfer" Energies 13, no. 6: 1370. https://0-doi-org.brum.beds.ac.uk/10.3390/en13061370