1. Introduction
Electrical power is vital for our life, as it has illuminated our living areas, workplaces, and planet. Electrical load consumption in a region varies with several parameters such as population density, wealth, social factors, climate and distribution of use between home and industry [
1]. It is required to have an accurate prediction of electrical load to continue to generate electrical power to meet demand and decrease the cost of electrical power delivery. In the UK, a study has shown that one percent load prediction error is equivalent to 10 million GBP in operating costs per year for the UK power system [
2,
3]. Electricity generation companies use load forecasting data from a couple of hours to a week ahead to produce energy at what is perceived to be the correct volume and to plan maintenance [
4]. Traditional flat methods of pricing electrical load are not efficient as they result in high peaks corresponding to people’s social behavior and the habits of industry [
4]. To avoid such peaks, manage the network and reduce bills, newer methods such as variable peak pricing tariff and real time pricing are proposed which heavily depend upon real-time load prediction. The output of the prediction algorithms is further utilized in real time pricing, decision making processes and control algorithms. Therefore, for power system management purposes, improving the performance of predictors is of high interest. Renewable energy sources such as solar energy [
5], wind power [
6] and offshore energy [
7] further increase the complexity and make predictions even more difficult due to their natural power fluctuations. Soft sensors technology [
8] can estimate solar irradiation [
5] which may contribute to decreasing the uncertainty introduced by this source of energy to the overall power system. However, along with reducing the uncertainty associated with renewable energy sources, usage of more powerful prediction approaches to deal with these uncertainties is highly desirable.
A variety of machine learning techniques are already used for electrical load prediction. Among classical approaches, the autoregressive integrated moving average method is most commonly used in the literature [
9,
10]. However, more recent approaches to electricity load prediction have explored the use of fuzzy logic due to its power to describe the real world in terms of IF-THEN statements as well as its learning capabilities. Among fuzzy logic approaches, interval type-2 fuzzy logic systems used in [
1] and interval type-2 Atanassov fuzzy logic systems (IT2AIFLS) used in [
11] are previous approaches which have been used to predict electrical load data in different regions of Australia and Poland, respectively. The IT2AIFLSs benefit from more degrees of freedom compared to interval type-2 fuzzy logic systems, as in addition to membership grades they benefit from non-membership grades. Based on previous studies, the greater degrees of freedom in this type of fuzzy system may improve its overall performance [
11,
12]. However, the success of such fuzzy logic systems is highly dependent on the methods used to solve the complex task of training them. This motivated us to challenge the use of new optimization methods to increase the performance of IT2AIFLSs.
Different methods currently exist to train IT2AIFLSs including gradient descent approaches as well as hybrid computational methods [
11,
12]. A full gradient descent method for training this structure is investigated in [
13], where statistical analysis supported the null hypothesis (
) that the IT2AIFLS outperforms type-1 Attanassov intuitionist fuzzy logic systems. Although gradient descent methods provide a computational approach to train IT2AIFLSs, they suffer from falling in a local minima and instability problems.
Hybrid computational methods instead use different training methods in the antecedent and consequent parts of an IT2AIFLS to improve performance. The hybrid training algorithms investigated in [
11] use gradient descent for the antecedent part of the IT2AIFLS and Kalman filter for its consequent part. This prediction model is then used for prediction of the Mackey–Glass chaotic time series, the Santa Fe time series and the Box–Jenkins time series, in addition to the electrical load consumption of Poland in the 1990s [
11]. This approach has also been applied for the prediction of energy, stock market and house price datasets [
12]. Hybrid training approaches utilizing intelligent optimization algorithms previously implemented on IT2FLSs include particle swarm optimization plus Kalman filter [
14], particle swarm optimization plus recursive least square [
14] and particle swarm optimization plus gradient descent [
15]. However, to the best of the authors’ knowledge a hybrid intelligent optimization approach for the antecedent part of an IT2AIFLS and a computational method for its conclusion part parameters has not been investigated in the literature. Hybrid training methods offer better performance than solely using a computational method as they do not have local minima and instability issues. Since intelligent optimization approaches are more appropriate options for the antecedent part parameters which appear nonlinearly in the output of an IT2AIFLS, they are more appropriate options for training them.
In this paper, a new hybrid training approach is proposed to improve the performance of the hybrid training methods. The gravitational search algorithm (GSA) is chosen for optimizing the antecedent part parameters of the IT2FLS. The GSA is a physics inspired optimization algorithm [
16] which defines each solution in terms of an object with mass, position, velocity and acceleration. The mass assigned to each object is proportional to its cost function and gravitational force among various objects absorbs masses with worst cost function to better object while scanning the space between them to find the optimum solution to the problem [
17,
18]. The GSA was chosen due to its high performance, benefiting from multiple solutions and less probability to fall in a local minimum. This algorithm has already outperformed several optimization algorithms such as particle swarm optimization, the real genetic algorithm, the differential evolution algorithm and central force optimization in benchmark optimization problems [
18,
19,
20]. Additionally, the ridge least square (R-LS) algorithm is chosen for the consequent part parameter which solves an
cost function as a summation over identification error square plus the
-norm of the weights of the prediction system [
21]. The R-LS algorithm is chosen as it is widely known to have superior generalization performance than the simple least square algorithm [
21]. Comparisons are made between the proposed approach and some of the existing approaches in the field including hybrid gradient descent Kalman filter training for an IT2AIFLS [
11] for electrical load prediction in Poland. Another comparison is provided between the proposed estimation method and seven different estimation algorithms for electrical load prediction in five regions of Australia, namely: SVR, ANN, ELM, EEMD-ELM-GOA, EEMD-ELM-DA, EEMD-ELM-PSO and EEMD-ELM-GWO. The comparison results show the superior performance of the proposed approach over state-of-the-art approaches in the literature. In particular, it outperforms the approach investigated in [
11] which uses the IT2AIFLS but hybrid gradient descent Kalman filter as the training algorithm.
This paper is organized as follows.
Section 2 introduces the general structure of interval type-2. The methodology of this paper is presented in
Section 3. Simulation results are presented in
Section 4. Finally concluding marks are presented in
Section 5.
2. Attanassov Intuitionist Fuzzy System
Atanassov intuitionist fuzzy logic systems are a newer variant of the fuzzy logic family which have been successfully applied for prediction purposes [
11] as well as pattern recognition [
22]. Non-membership grade (
) for an input to an ordinary fuzzy MF (
) is simply calculated as the complement of its membership grade as (
). However, for an intuitionist fuzzy set
does not necessarily need to be equal to one [
23]. This introduces a degree of hesitation or intuition for the fuzzy set. Atanassov in 1986 defined
as the degree of hesitation which complements the membership and non-membership grades of an input such that
.
2.1. Attanassov Intutionist Fuzzy Set
A fuzzy set is an ordinary fuzzy set if the degrees of membership and non-membership for every single input value add up to one. However, if the degrees of membership and non-membership do not add up to one for some input values, the fuzzy set is an intuitionist one. Let
be the universe of discourse and
be an individual value selected from it. The intuitionist fuzzy set
is defined as presented in the following equation:
where
is the membership grade and
is the non-membership grade for the input value
, and we have
[
24]. In the special case, when
the intutionist fuzzy set reduces to an ordinary fuzzy set. However, if this equality does not hold the intuition index of
in
is represented by
and defined by:
2.2. Structure of Attanassov Intutionist Fuzzy System
Let
be the total number of inputs for the IT2AIFLS, with each sample containing
dimensional input values
and
dimensional output values
. The membership functions considered for this structure are interval type-2 Gaussian MFs with uncertain
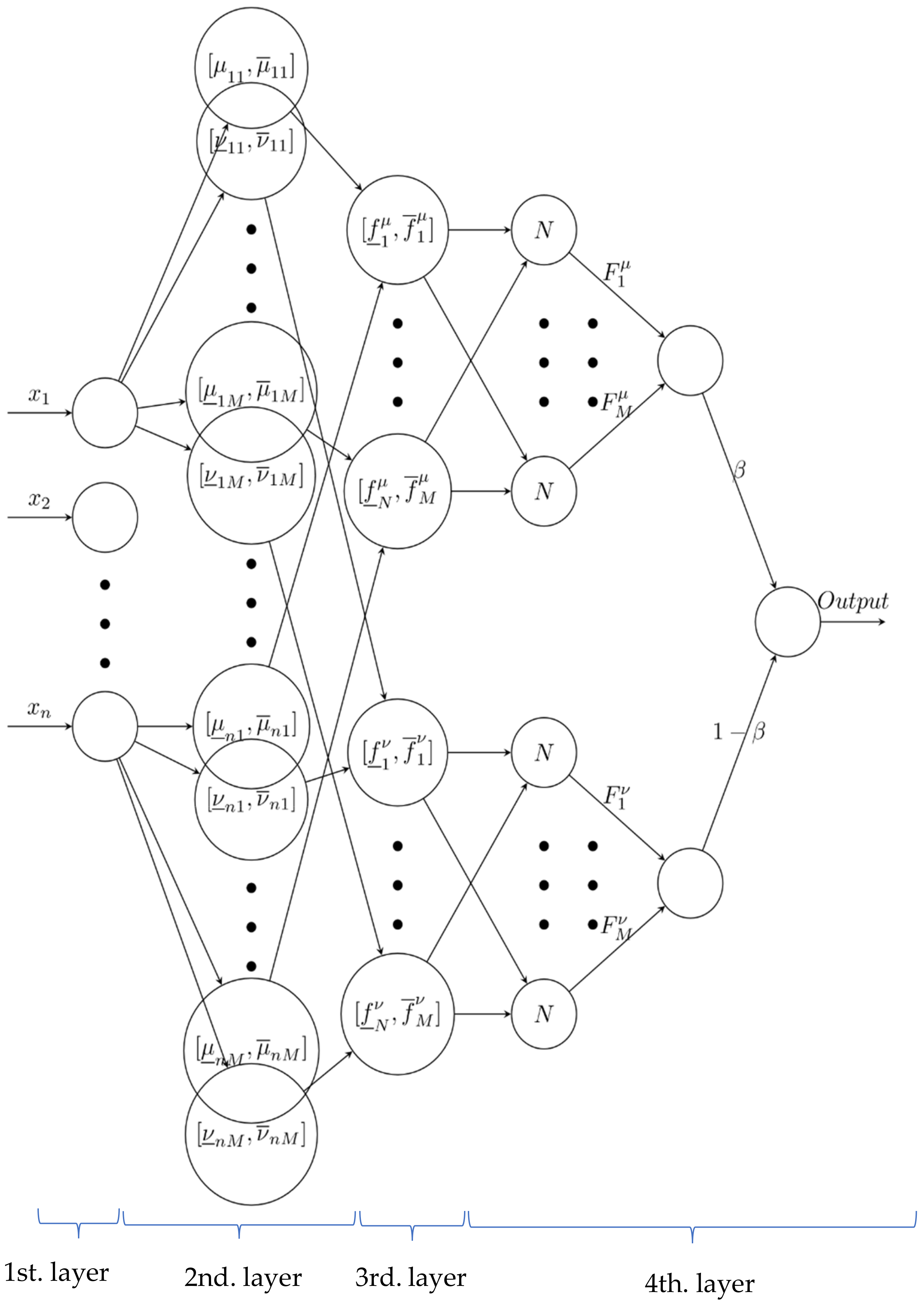
values. The inference mechanism to calculate the output of the IT2AIFLS is demonstrated in
Figure 1 and is explained as follows:
Layer 1: The input layer is the first layer of this system which consists of nodes passing input values to the fuzzification layer.
Layer 2: The fuzzification layer is the second layer which uses interval type-2 Atanassov membership functions. The inputs to this layer are the outputs of the previous layer and its outputs are the degrees of membership and non-membership which are themselves interval values. The
represents the IF-index or hesitation of center and
is the IF-index of variance and are defined by:
such that 0 ≤ π_c (x)≤ 1, 0 ≤ ▁π_var (x) ≤ 1 and 0 ≤ ¯π_var (x) ≤ 1 and the degrees of membership as well as non-membership are defined as follows:
The parameters , , , and are premise part parameters associated with interval type-2 intuitionistic fuzzy MFs. Furthermore, n is the number of inputs to the system and M is the total number of rules in the fuzzy system.
Layer 3: The rule layer is the third layer of the IT2AIFLS which calculates the firing values of the rules of the fuzzy system are presented by [
12]:
Layer 4: The output layer is the last layer of the system which performs the defuzzification + type reduction and calculates the output of the fuzzy system as follows.
where the parameter
is the coefficient which determines the weight of its corresponding terms in the output. Moreover, the firing of the rules corresponding to the membership functions are defined as follows:
and the ones corresponding to non-membership values are defined as follows:
Furthermore,
and
are defined as follows:
The output of the IT2AIFLS can be rewritten as follows [
25]:
The Equation (10) can be further compacted to the following form.
To be able to apply ridge least square algorithm to update the parameters of the IT2AIFLS, we need to write it as follows:
where the parameters
and
are as follows:
and the parameters
and
are as follows:
5. Conclusions
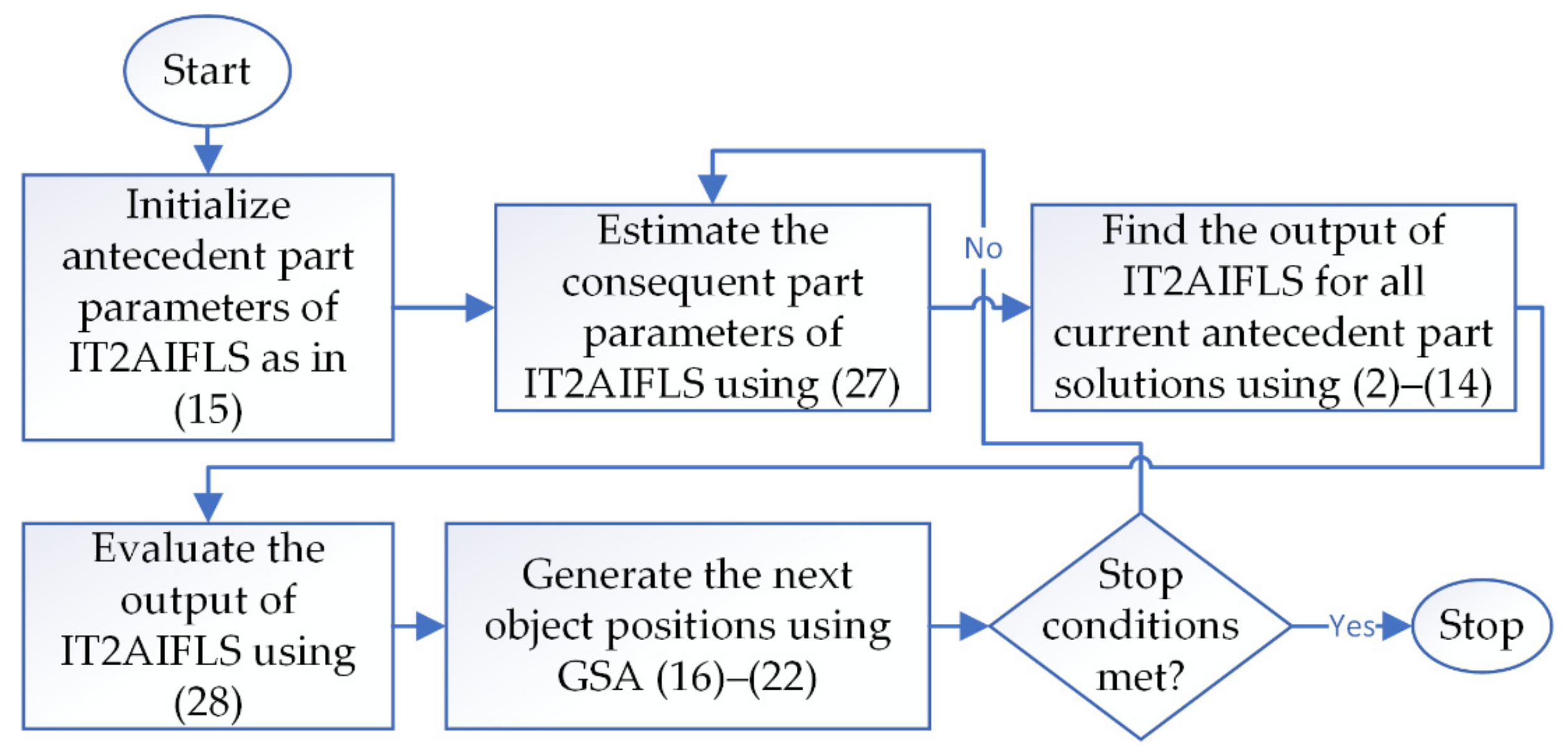
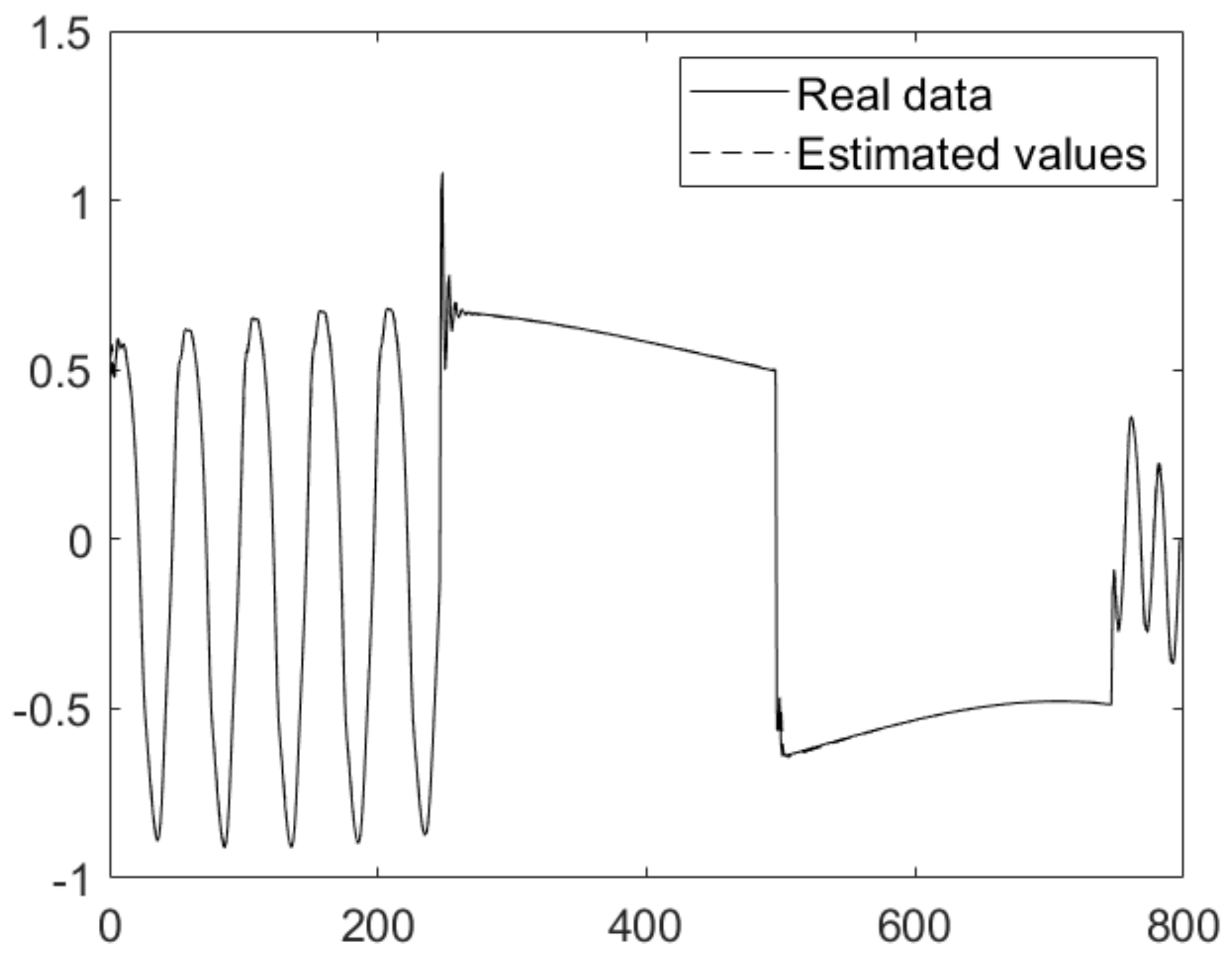
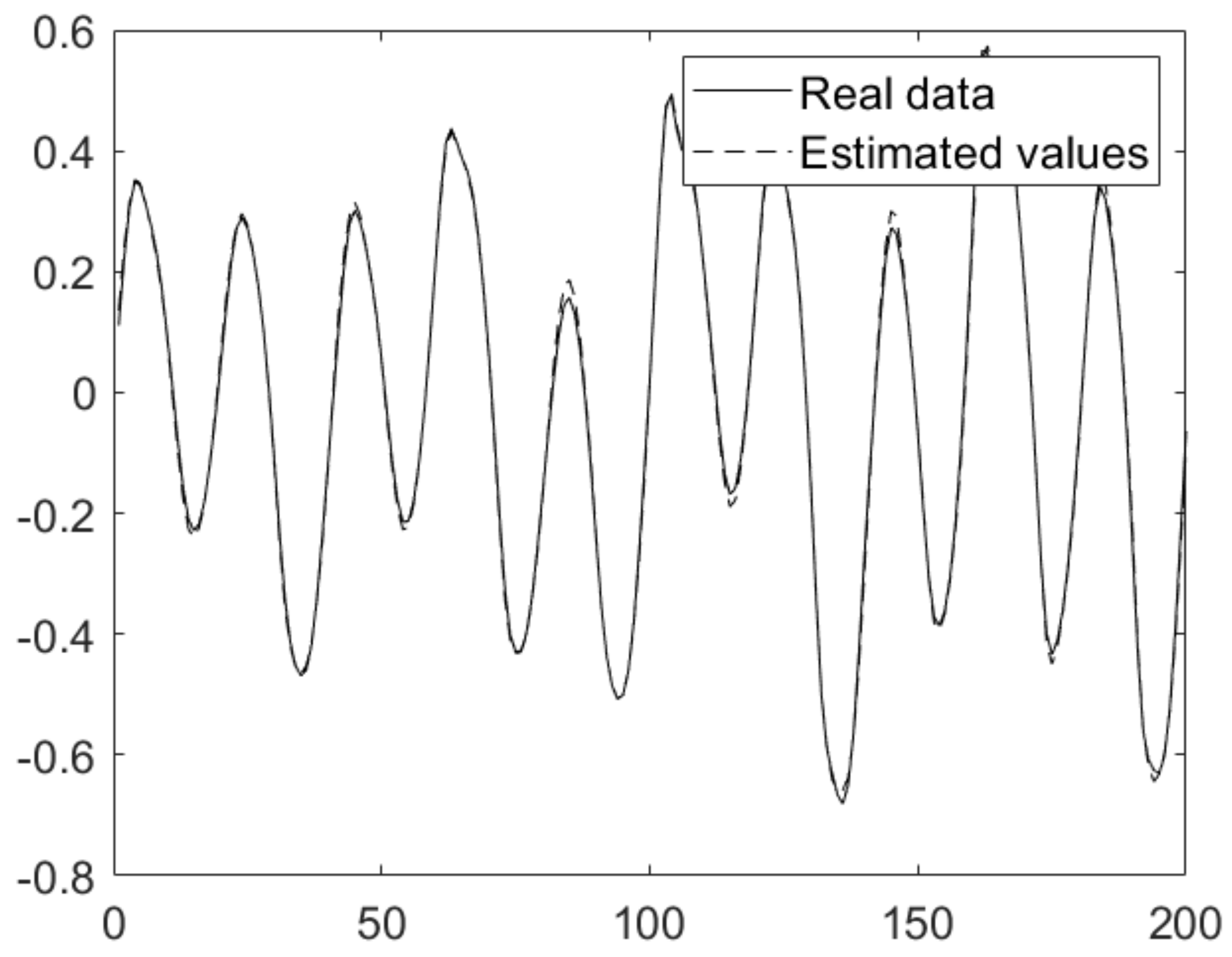
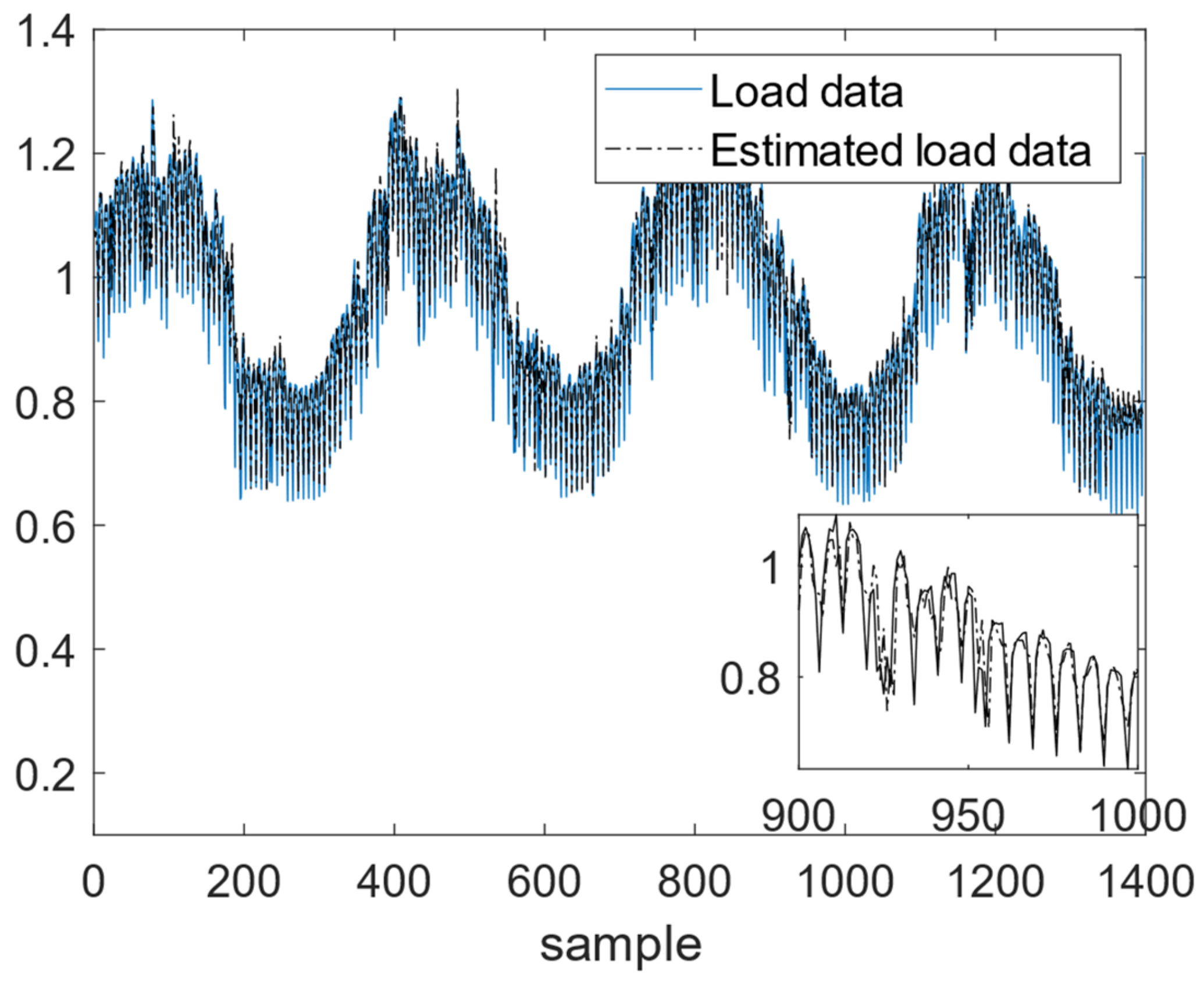
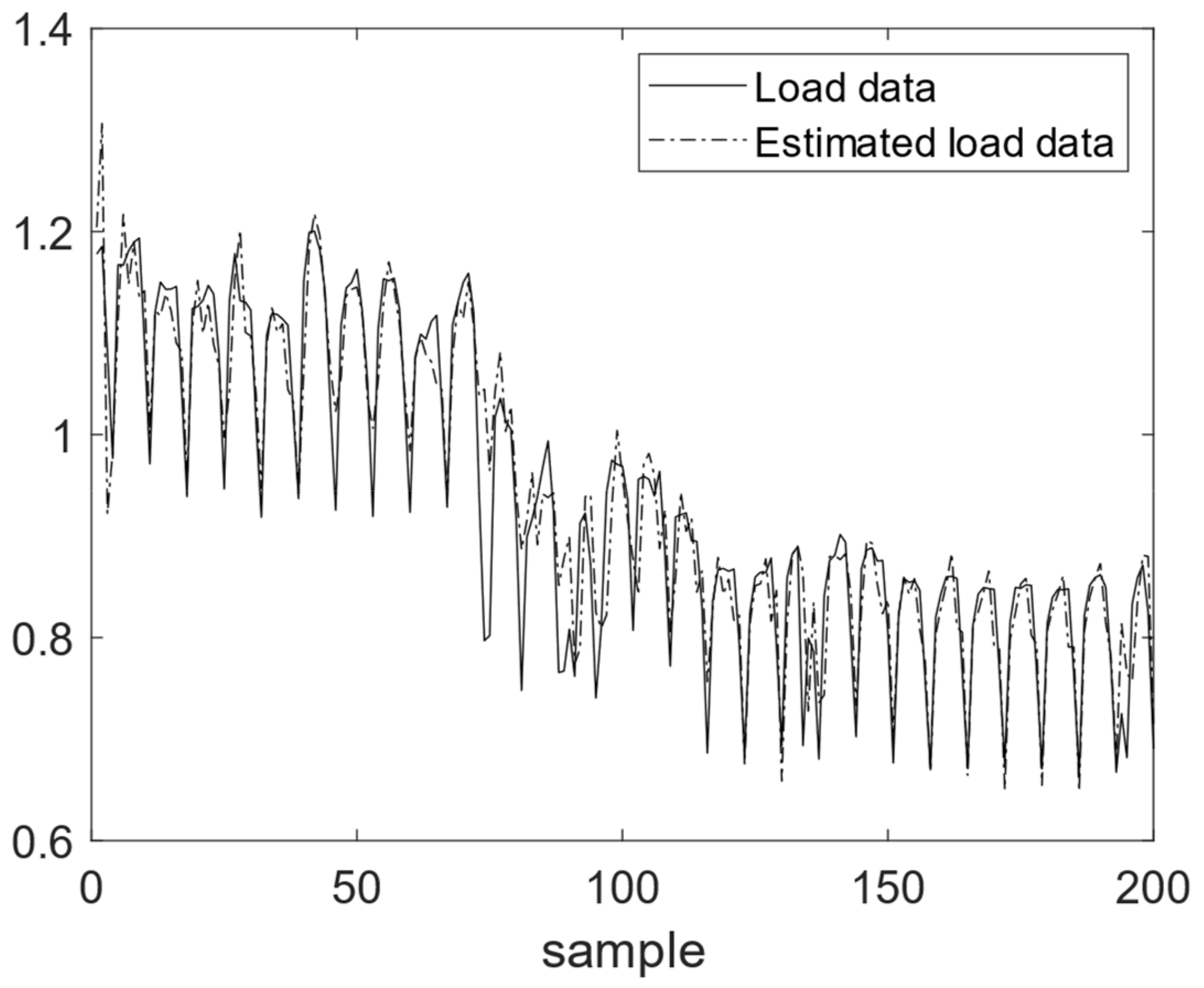
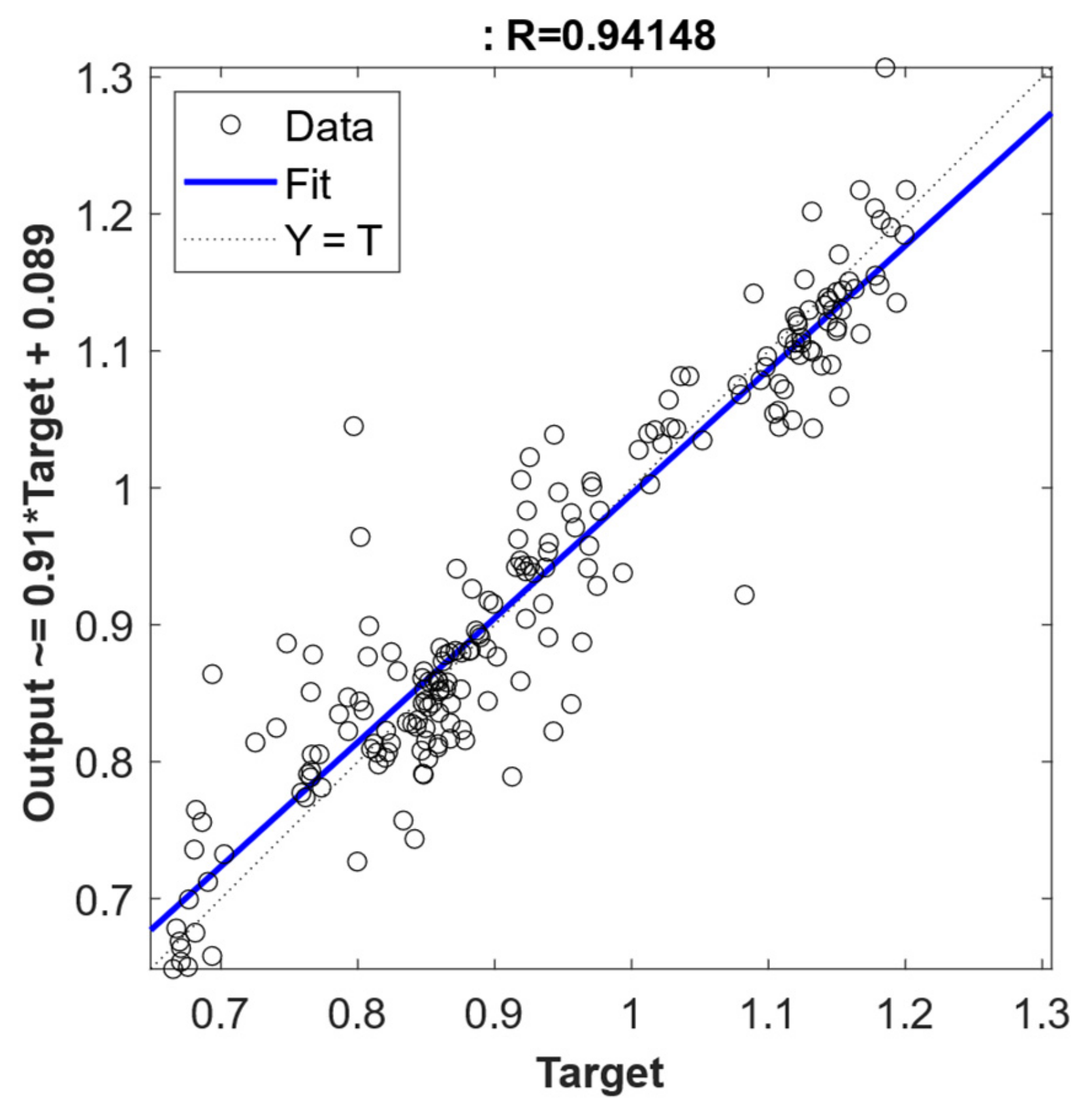
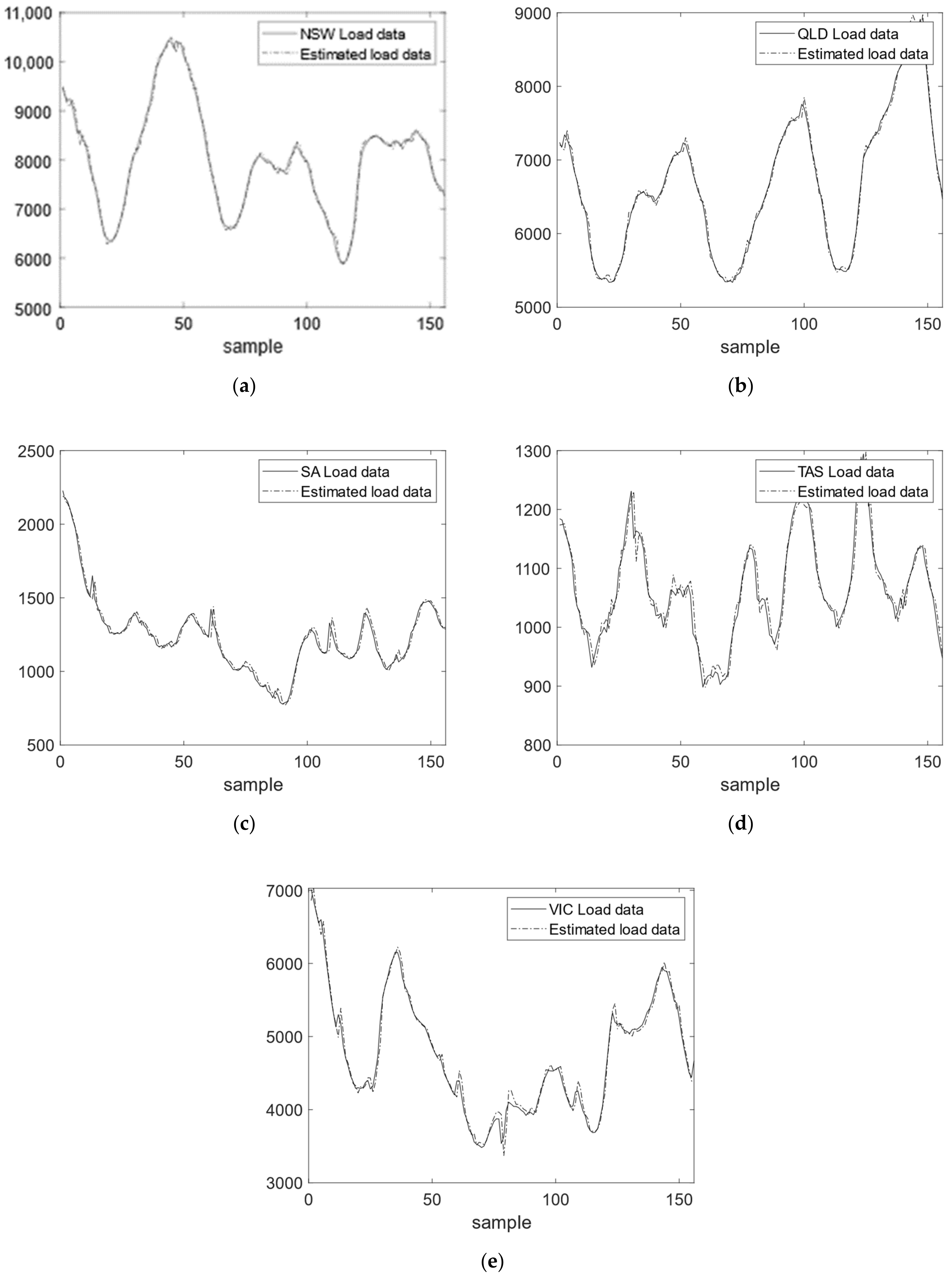
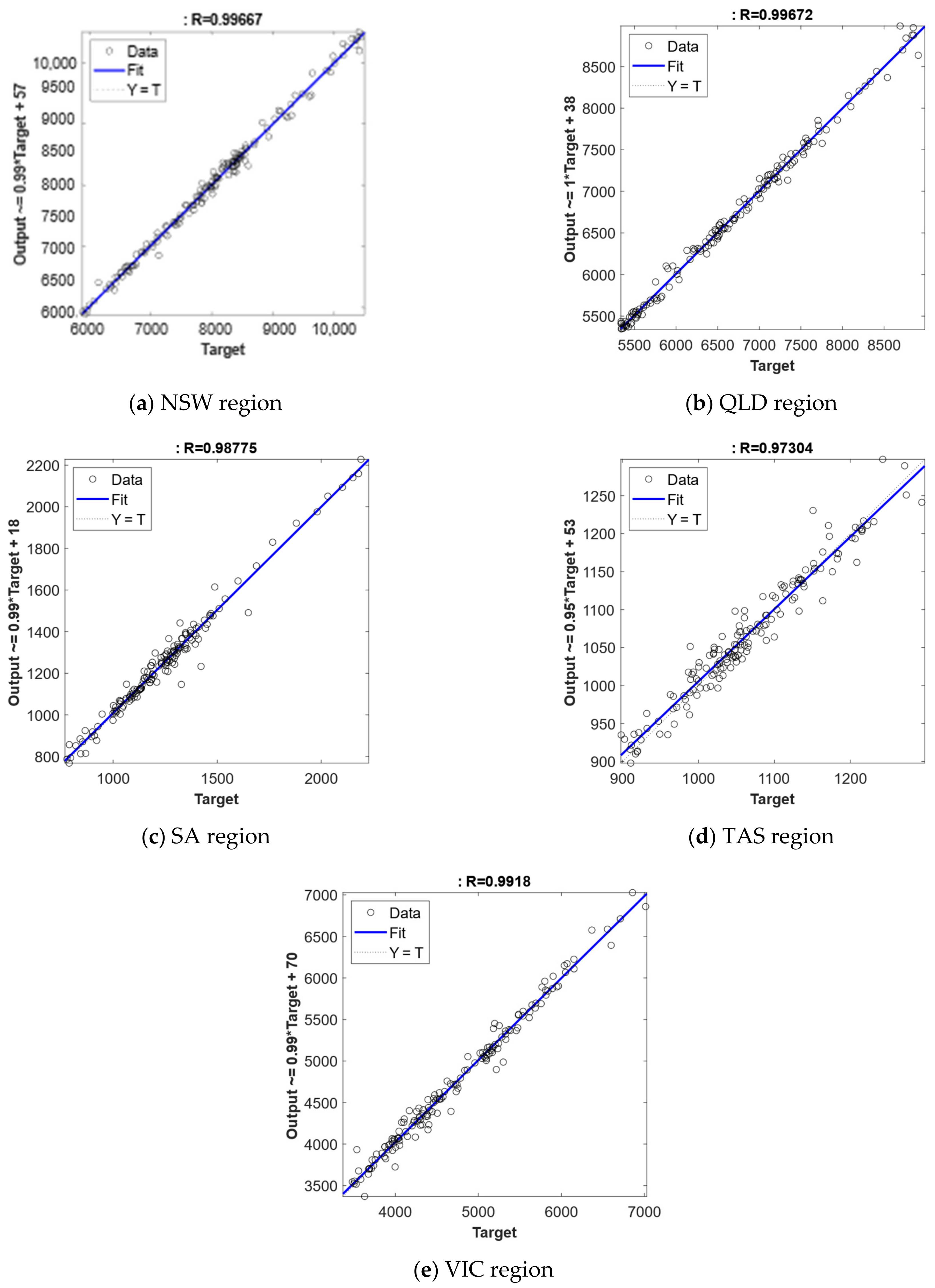
In this paper, a IT2AIFLS is trained using a hybrid method containing the GSA for the antecedent part parameters and the R-LS algorithm for consequent part parameters. A benchmark system identification problem is studied to investigate the efficacy of the proposed system parameter tuning approach on previous identification benchmark problems. The comparisons with several other methods including Type-1 TSK FNS, Type-2 TSK FNS, Feedorward Type-2 FNN, SIT2FNN, SEIT2 FNN, TSCIT2FNN, IT2 FNN-GD, IT2 FNN-SMC, IT2 FNNPSO+ SMC, IT2 IFLS -DEKF+GD, and IT2FLS with Modified SVR support the idea that the proposed approach is an efficient approach in system identification problems. The proposed approach is then investigated on electrical load prediction for five regions of Australia and Poland in the presence of noise and uncertainty which inherently exist in these datasets. Statistical properties of these datasets are presented that show they can be either stationary, trend stationary or difference stationary. In the case of the Poland electrical load dataset, the inputs to the IT2AIFLS are considered to be current values as well as three consecutive time delays of data. In the case of the five regions in Australia, current data values as well as four consecutive lags are used as the inputs to the fuzzy logic system. In both cases, one-step ahead prediction is considered. For the Poland dataset, the obtained prediction results are compared with several other algorithms including IT2FLS DEKF+GD, IFLS DEKF+GD and IT2IFLS DEKF+GD. The comparisons made in this paper show that the proposed algorithm results in superior performance when it is compared to these methods. For the case of the five regions of Australia, it is observed that the proposed prediction can perform with a much higher performance as compared with SVR, ANN, ELM, EEMD-ELM-GOA, EEMD-ELM-DA, EEMD-ELM-PSO and EEMD-ELM-GWO methods of prediction. Hence, the proposed approach is an automated solution to develop the antecedent part parameters of an IT2AIFLS, which successfully outperforms current state-of-the-art approaches in literature when applied to an electrical load prediction problem.
A possible direction of future work is the development of an interpretable IT2AIFLS which would lead to IF-THEN rules to describe the overall behavior of the electrical load system. Such IF-THEN rules are easy to communicate and may help experts to make more efficient decisions using their knowledge and experience. An additional direction of future work would be to apply the model to other time series prediction or system identification problems to test its applicability to enhance prediction in other industries.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}