1. Introduction
Space exploration has been one of the main research areas of science for the last few decades. With the increase in the space exploration race, the observation of different planets in space has gained popularity. The nearest neighbor to Earth is Mars, which has attracted human beings more than any other planet. In this context, Mars landing, and exploration missions started in the 1970s. Most of them failed whereas few ended successfully. Mars landing sites for initial missions had high altitudes whereas Mars missions in the future will land at low altitudes. Thus, more precise landing technology is required for future missions. Therefore, this research would be very helpful to present predictive control algorithms for future Mars landings. Every single mission to Mars has these four stages: launch from Earth; the cruise stage, which takes about 6 to 9 months; entry, descent, and landing (EDL); and then finally, the surface missions start. EDL is a crucial stage as it is responsible for the success of the complete mission. It has three phases: the entry phase, parachute phase, and terminal descent phase. The descent phase is further divided into two parts: gravity turn and the powered descent. The focus of this work is the powered descent-based landing of Mars.
- ⮚
Firstly, the major objective of this study is to minimize landing error during the powered descent phase.
- ⮚
The second objective involves constrained optimization in a predictive control framework for landing at non-cooperative sites.
- ⮚
In this work, the landing dynamics of the planetary lander are emulated by a vertical takeoff and landing (VTOL) unmanned aerial vehicle (UAV).
This work is focused on developing a constraint optimization predictive control algorithms for powered descent-based Mars landing. The proposed control laws are validated on an Earth-based testbed in a simulation environment. The testbed used for this purpose is the quadrotor UAV. Due to its dynamic nature, the quadrotor can emulate a planetary lander. It is used to perform landings similar to the Mars-powered descent. During the landing phase, the lander comes across obstacles and hazards. So, there is a need to implement such a control algorithm that can predict such hazardous constraints and generate optimal solutions such that the constraints are not violated. Therefore, MPC is good for use under such conditions as it can predict future output constraints in advance and can also respect input constraints. However, there are a few issues while implementing MPC, including its computation time and feasibility. MPC can take a significant amount of time to generate an optimal solution at every sampling time. As an alternative to this problem, another predictive algorithm is proposed in this work. This alternative predictive control algorithm is known as Explicit MPC (EMPC).
- ⮚
The MPC and it is variant, as stated above, are implemented on quadrotor UAVs for powered descent.
- ⮚
The proposed explicit predictive control algorithm is explored and compared with a simple predictive algorithm for Mars landing, which is the main novelty of this work.
- ⮚
PID and LQR control algorithms are also implemented for the powered descent landing phase to obtain a comparative analysis with predictive control algorithms.
Like guidance and navigation, control is also important for the safe landing of planetary landers. Different control algorithms have been explored for Mars EDL missions. They have been used for trajectory generation and trajectory tracking as well. Similarly, in [
1], a tracker-based reference control was designed. At first, a reference model was planned offline. The algorithm mentioned above with a compensator was used to track the desired profiles. The feasibility and robust behavior of the algorithm were verified using simulations. In [
2], an active disturbance compensation algorithm is given. ADRL is an emerging control algorithm that is independent of the accurate model of the system. Simulations were performed based on the MSL case study. The results were compared with PID, which showed that ADRL is better for tracking problems as compared to PID. Whereas in [
3], a terminal Sliding Mode Control (SMC) algorithm is proposed to track the desired trajectories. The stability of the stated control algorithm was verified through the Lyapunov-based approach. A state observer was used in this work for estimating the uncertainty. These two approaches combined converge the system states to the reference trajectory.
Similarly, in [
4], the powered descent phase of Mars is focused on. An adaptive neural network approach is used to precisely track the desired reference. Using Lyapunov stability, it is proved that the errors for the presented algorithm are uniformly bound. The approach was good at following the desired trajectories and was robust against wind disturbances and uncertainties. In [
5], a detailed overview of Mars guidance and control technologies is given. All the past technologies used for such missions are analyzed and future opportunities are discussed briefly. The primary goal of this work was the atmospheric entry of Mars. An active fault-tolerant control method for Mars entry based on a neural network is proposed. At first, an online neural network is used to for fault detection and isolation. Secondly, a neural network-based PID controller is implemented for fault-tolerant Mars entry. The conventional PID control algorithm is switched to the neural network-based PID controller whenever a fault is detected. The effectiveness of the proposed algorithm was verified by computer simulation.
Recently, in [
6], a barrier Lyapunov function (BLF)-based SMC is presented to overcome the Mars landing problem. With the combination of the novel logarithm-type BLF, the SMC proved stable in the presence of external disturbance and input saturation. The MSL Mission-based Mars entry scenario was used for the simulation to verify the verification. The results proved the effectiveness of the BLF-based terminal SMC design. Whereas in [
7], a tracking control scheme is presented for Mars landing under uncertainty. At first, a novel fixed-time nonsingular terminal sliding mode (FTNTSM) surface is developed, which gives fast convergence. Secondly, based on the FTNTSM surface, a continuous adaptive fixed-time nonsingular terminal sliding mode control (AFTNTSMC) method is designed. Under this control scheme, fixed-time convergence of the tracking error is achieved. The effectiveness of the proposed control algorithm was verified through numerical simulations. Furthermore, in [
8], a deep reinforcement learning-based guidance and control method are proposed for Six Degree-of-Freedom (DOF) planetary landing. Simulation was performed, which showed the effectiveness of the proposed guidance and control methods for the stated problem. It showed a robust performance in the presence of noise and parametric uncertainty. Similarly, in [
9], an integrated estimation and control algorithm for Mars landing is presented for accurate navigation and control in the presence of uncertainties. This method is based on a variable structure control framework. The performance of this method was analyzed via Monte Carlo simulations in the presence of different uncertainties. The results were compared with the results of an extended Kalman filter and PID controller algorithm. The proposed algorithm showed a robust and precise performance and proved its superiority against conventional algorithms.
Like other control algorithms, optimal and predictive control algorithms have also been used for Mars landing problems. Like in [
10], a comparative analysis was performed based on simulations between one and two parametric shooting predictive methods. Additionally, an identification approach that adapts to the varied environment was used. The computer simulations showed the second technique is more accurate. In [
11], a trajectory optimization algorithm for the power descent landing phase is presented considering the disturbances. A composite solution based on a non-linear controller and a disturbance compensator is presented. The robustness and feasibility were verified through simulations for Mars landing missions.
In [
12], it is mentioned that real-time embedded MPC would be an important guidance and control strategy for the next generation of space missions. An embedded MPC for thrust vectored control is proposed for the ascent and pinpoint descent phase. The following simplifications are involved for system modeling: (a) planet rotation is ignored; (b) the flat surface of the planet is considered; (c) uniform gravity; and (d) aerodynamic effects are negligible. Furthermore, for optimization, an accelerated dual gradient projection (GPAD) algorithm is used for quadratic programming. Similarly, in [
13], a composite controller is implemented for following the Mars trajectory. It involves MPC as an optimal trajectory tracking control algorithm and an observer-based feedforward compensator. The simulation results showed an improvement in the performance compared to previous results.
At last, in [
14], a constrained dynamic algorithm is presented that reduces the expected cost whereas the chances of violating the constraints are bounded. Applications of this algorithm have been shown for tracking Mars and lunar landings through simulations. All these predictive algorithms used for the Mars landing gave satisfactory results. However, they lack a few aspects that are very necessary for a safe landing. For example, a few of them lack a constraint handling ability while in others, the computational time was not considered at all. Few of these predictive algorithms were only used for trajectory generation, whereas most were not focused on the powered descent phase. In powered descent, hazard avoidance features of safe landing must also be considered. Therefore, a predictive control algorithm with a constraint handling ability, an effective computational time, and focused on powered descent needs to be further explored.
- ⮚
In most of the research mentioned above, only the entry phase of Mars, the landing, has been the focused area.
- ⮚
In past research, the powered descent phase has not been focused on specifically.
- ⮚
All the above-mentioned research lacks the ability of the constraint handling feature, which is very important for the Mars landing problem.
Like the above-mentioned planetary UAVs, similar control algorithms have been used for terrestrial UAVs as well. In this context, recently, an adaptive SMC was presented for attitude and altitude stabilization of a quadrotor in [
15]. It was concluded that in comparison with conventional control strategies, better tracking performance and disturbance rejection can be achieved with the proposed control algorithm. Whereas, in [
16], another SMC is proposed for the quadrotor tracking control problem to achieve robustness. The main advantage of this proposed method is that the chattering issue is resolved along with a fast and precise dynamic response. Meanwhile, all the errors present in the closed-sloop were proved to be bounded through Lyapunov analysis. Finally, the effectiveness of this control method was verified through simulations and experimentation.
The section division of this paper is as follows:
Section 2 outlines the UAV test platforms whereas
Section 3 discusses the control algorithms for Mars landing.
Section 4 describes Mars landing control. Finally,
Section 5 contains the conclusion of this research work.
2. UAV Test Platform
In the literature, there are examples of emulating the dynamics of the lander with other dynamical systems. A helicopter UAV was used for this in [
17], where a six d.o.f platform was introduced to emulate a planetary lander. Similarly, the Autonomous Helicopter Testbed (AHT) is an experimental platform used to evaluate proposed technologies for future space missions. The Gantry Testbed (GT) was developed to test algorithms before implementing them on the AHT testbed. This can be controlled to follow desired trajectories. Furthermore, the Planetary Landing GNC Test Facility (PLGTF) was designed by European Space Agency (ESA) for the verification of precision landing GNC systems. It consists of a flying testbed that is outdoors along with a station on the ground, which is designed according to the powered descent of Mars and the Moon [
18].
A testbed for a lunar mission specially designed for long-duration analysis and testing was presented in [
19]. It is comprised of hardware and software, which exhibits the dynamics that closely approximate the original lunar landers. Similarly, the Landing Dynamic Test Facility (LDTF) was designed in collaboration with the Canadian Space Agency (CSA) and NGC’s Laboratory, Sherbrooke, Canada in 2007. The main purpose of LDTF was to fill the gap between computer simulations and real and expensive rocket-based flight tests [
20].
A quadrotor is a multirotor type of UAV. It has many advantages over traditional helicopters and fixed-wing aircraft due to its dynamic nature. It has the ability of VTOL, hovering, and flying in six degrees of freedom. Such flying abilities make it possible for quadrotors to take off and land in any environment, making them an ideal and relevant platform for emulating a planetary lander. It has four rotors and their arrangement relative to coordinate system has two configurations: the “x” and “+” [
21]. The quadrotor has four inputs controlling six degrees of freedom output states as given by Equation (1). Three of them are translational while the other three are rotational outputs. It can follow the trajectories like a spacecraft. To implement optimal and predictive control, a state-space model of the system is required. The state-space model can be derived from linear or nonlinear equations of the system. In this part, a state-space model of the system is used to implement MPC. The state-space form can handle linear, nonlinear, and unstable systems as well. The non-linear equations of the quadrotor are given below by Equation (2):
This non-linear model of a quadrotor is used from our past work [
22], where x, y, z is the position; u, v, w represents the velocity; and φ, θ, ψ are the Euler angles. The linear state-space model of a quadrotor is derived from Equation (2) by applying small-angle approximation and is given by Equations (3)–(7):
In Equation (4), x, y, z are the position coordinates of the quadrotor;
are Euler angles; and
are the velocities of the quadrotor given in Equations (6) and (7):
4. Mars Landing Control
The powered descent phase is the main focus area in this study. First, the lander obtains the desired orientation and then descends vertically. Ideally, the lander only has a vertical velocity at this point. In powered descent, once the thrusters start, and they cannot be turned off. Therefore, the controller must look for both the minimum and maximum limits for thrust levels during computation. These thrust constraints should be incorporated during optimization. Another constraint for such propulsive landers is to spend a minimum amount of time near the surface during touchdown. This prevents the lander from facing hazards.
Instead of considering the Mars lander as a point mass, a quadrotor UAV can also be used instead to perform this terminal descent [
32]. It is a very unique idea to implement, test, and evaluate different landing control algorithms on such a simple and reliable test platform before they are implemented on a real Mars lander. We are interested in evaluating the tracking performance of the proposed control algorithms with input constraints on thrust inputs and some output constraints on the trajectory of the Mars lander for the powered descent landing phase. The following assumptions need to be considered to test the proposed control algorithm: at first, a non-zero final vertical position for landing is considered [
32]. Secondly, the curvature of Mars is negligible. Thirdly, centripetal and Coriolis forces are not considered. Furthermore, an optimal trajectory is considered for the powered descent phase of the Mars landing. Moreover, during the descent phase, the distance from the surface is very short, so a uniform gravitational model is used in the equations of motion. Finally, as the lander has very little velocity in the descent phase compared to the entry phase, the aerodynamic forces become insignificant and the thrust force from the descent engine is dominant at this point. In [
33], details of the Mars landing for the Phoenix mission are given. The powered descent starting point has a mean value of 51.9 m in the case of phoenix. This height varies with different missions. It was 142 m in the case of MSL [
34]. Thus, in the simulations, we considered this height to be 150 m. Keeping in view the ending point constraint of the landing, a height of 2 m above the surface level was selected. Two scenarios were selected to exhibit the powered descent on the quadrotor in the simulation environment as stated below. It is assumed in both scenarios that the sensors are given accurate information about the states of the system.
4.1. Scenario 1
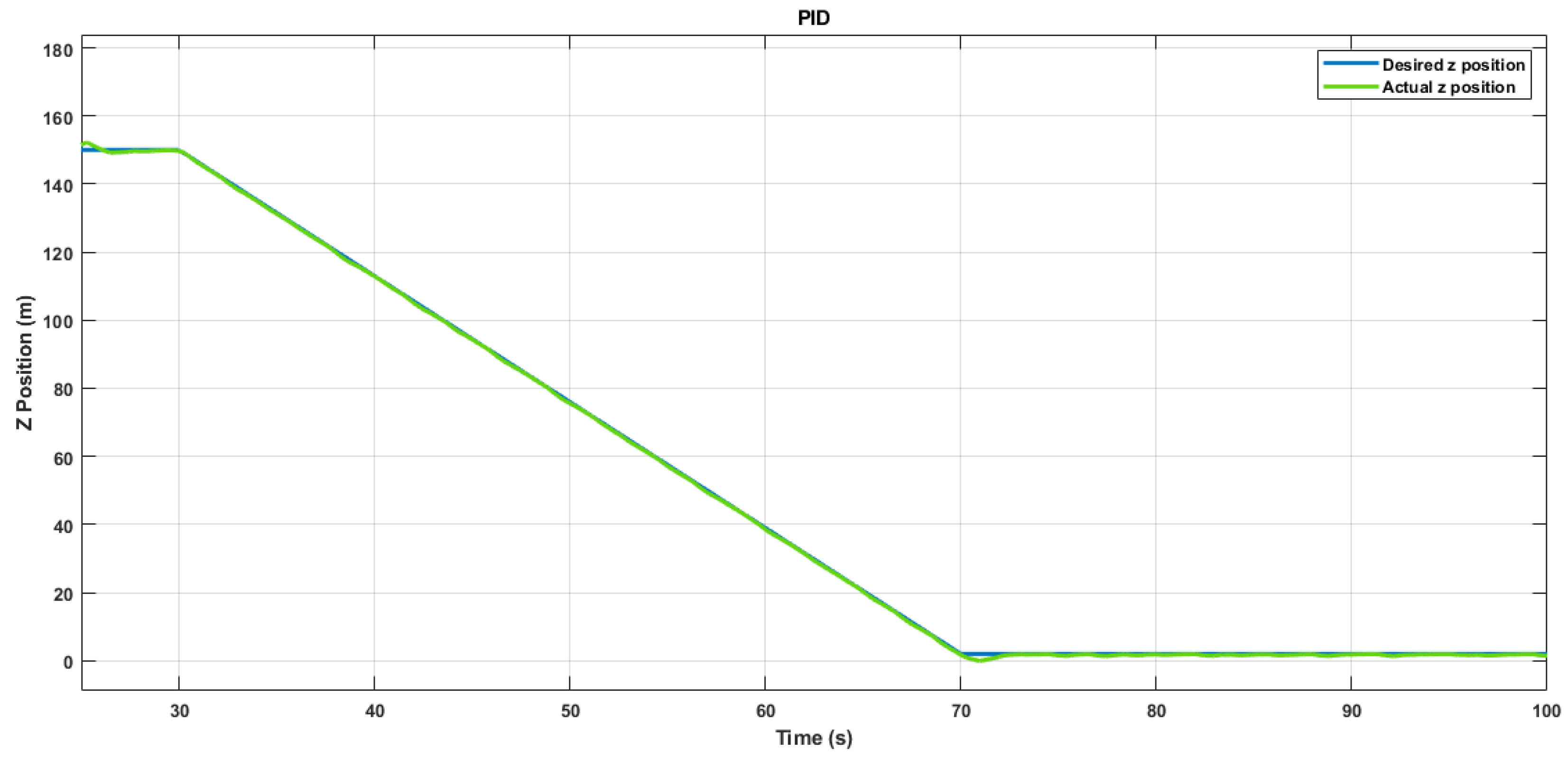
In the first case, the quadrotor descends from a height of 150 m to a height of 2 m, with zero x, y starting positions. A reference trajectory is given to the quadrotor comprising x, y, and z values as required by the condition to evaluate the control algorithm. At first, the tracking performance of the PID control algorithm is checked and the results are plotted in
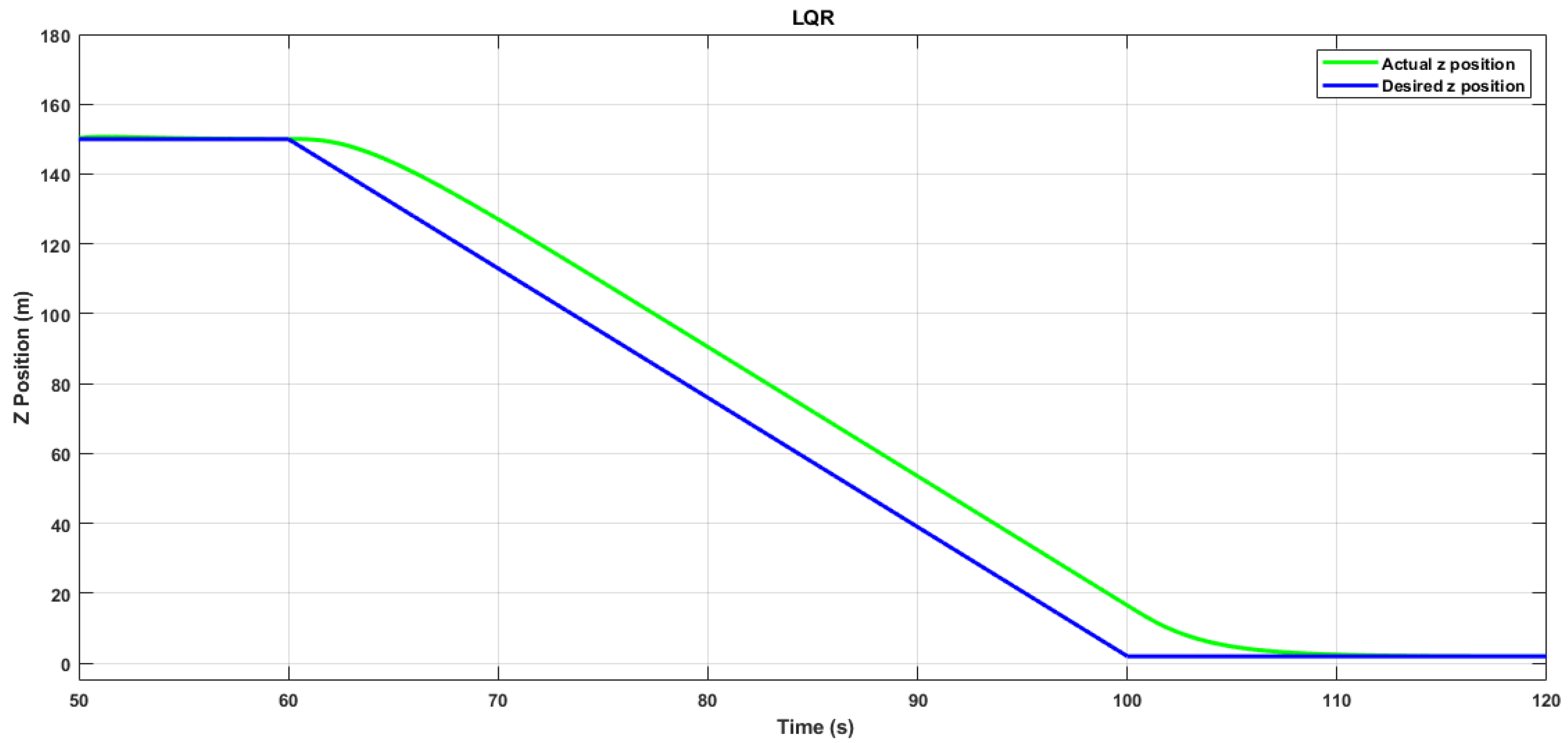
Figure 1. The PID controller shows a good tracking performance. Although the PID algorithm shows some overshoot, overall, it shows good tracking ability. After evaluating the PID algorithm for powered descent, LQR is implemented next. The same trajectory is applied to the quadrotor as a reference with the LQR control algorithm and verified tracking performance. The results of the tracking performance with LQR are given in
Figure 2, showing the desired and actual values along the z-axis. The results show a good tracking performance with the LQR controller. Though it lags in performance for tracking the z-axis by some value compared with PID, it does not overshoot like PID.
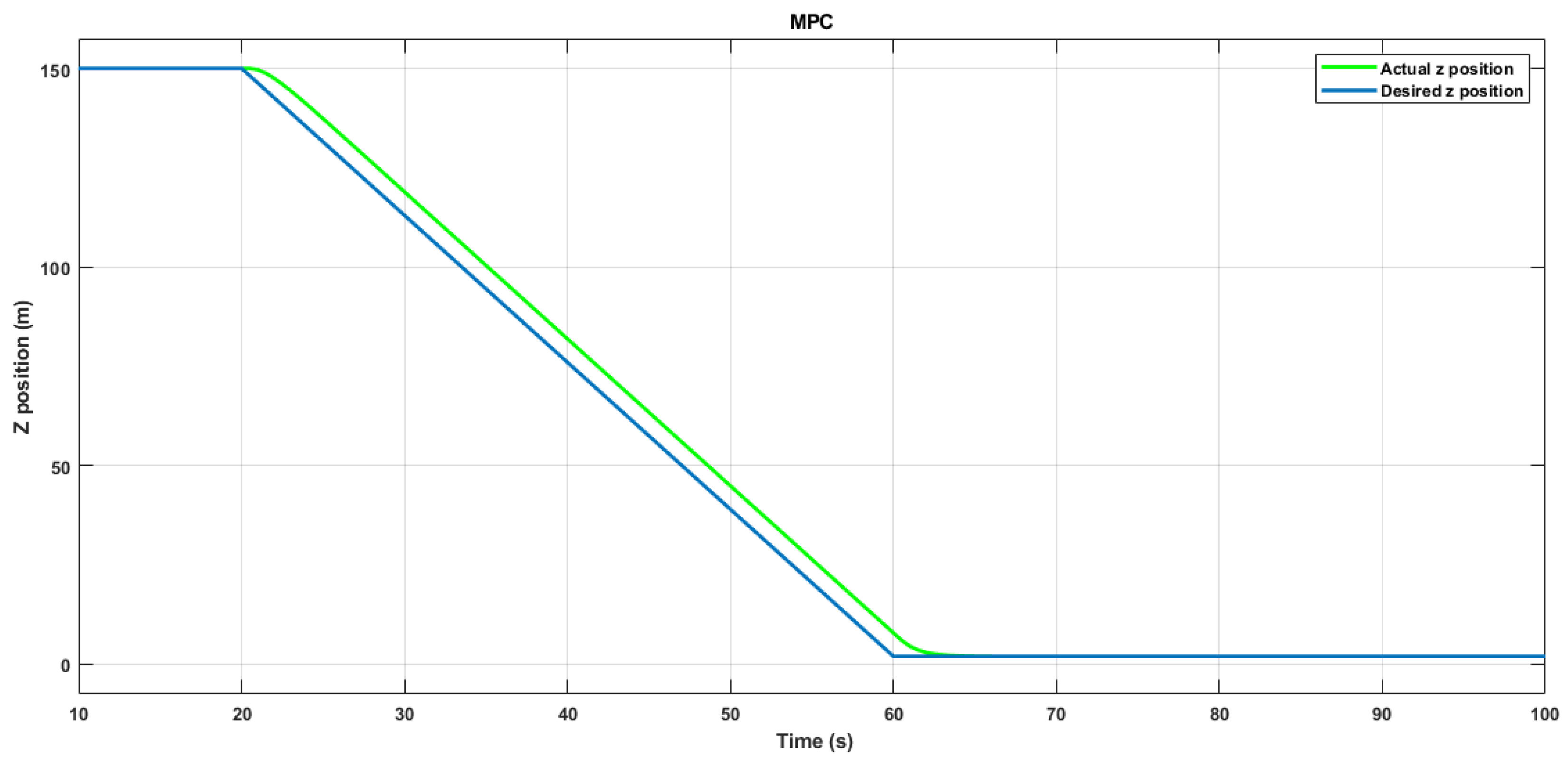
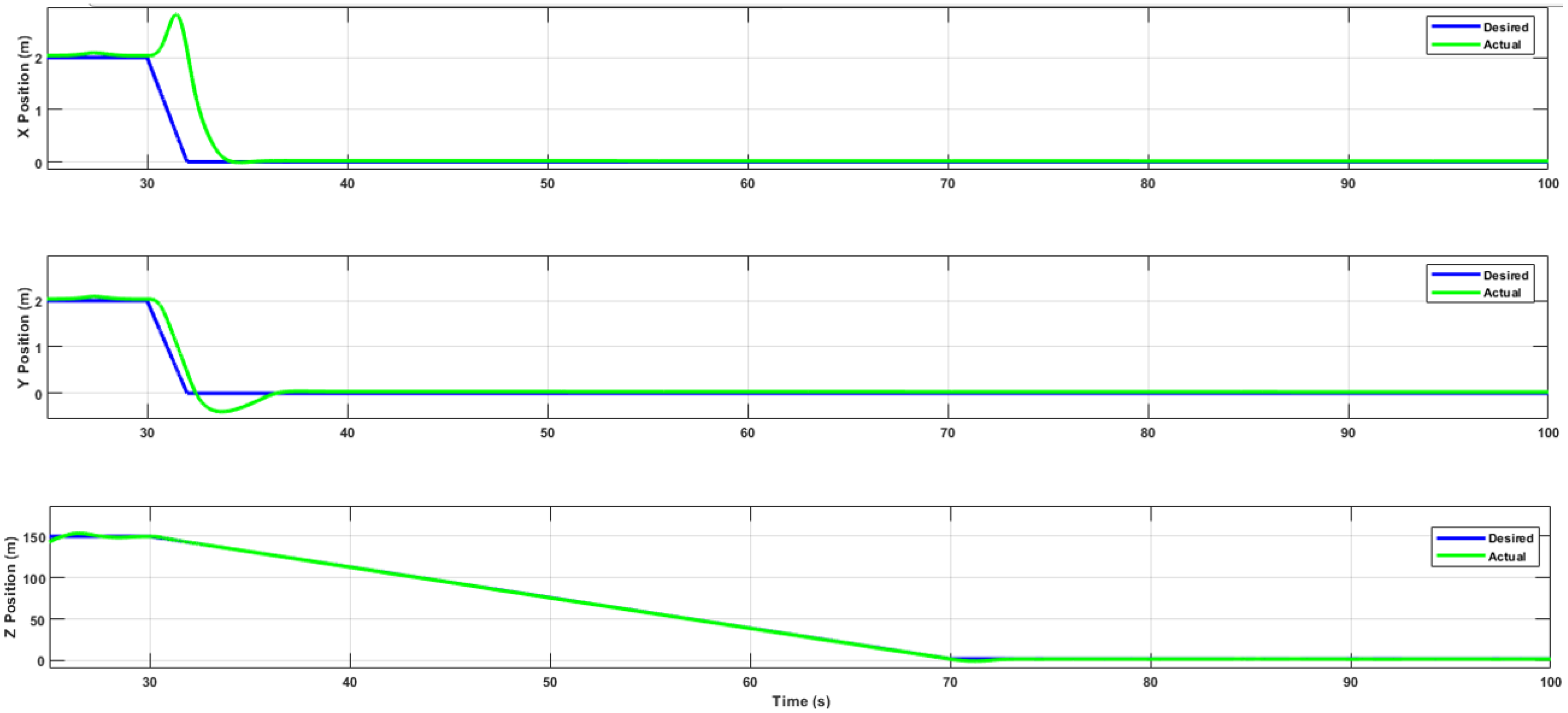
After the PID and LQR control algorithms, MPC is explored for the stated case of the Mars-powered descent.
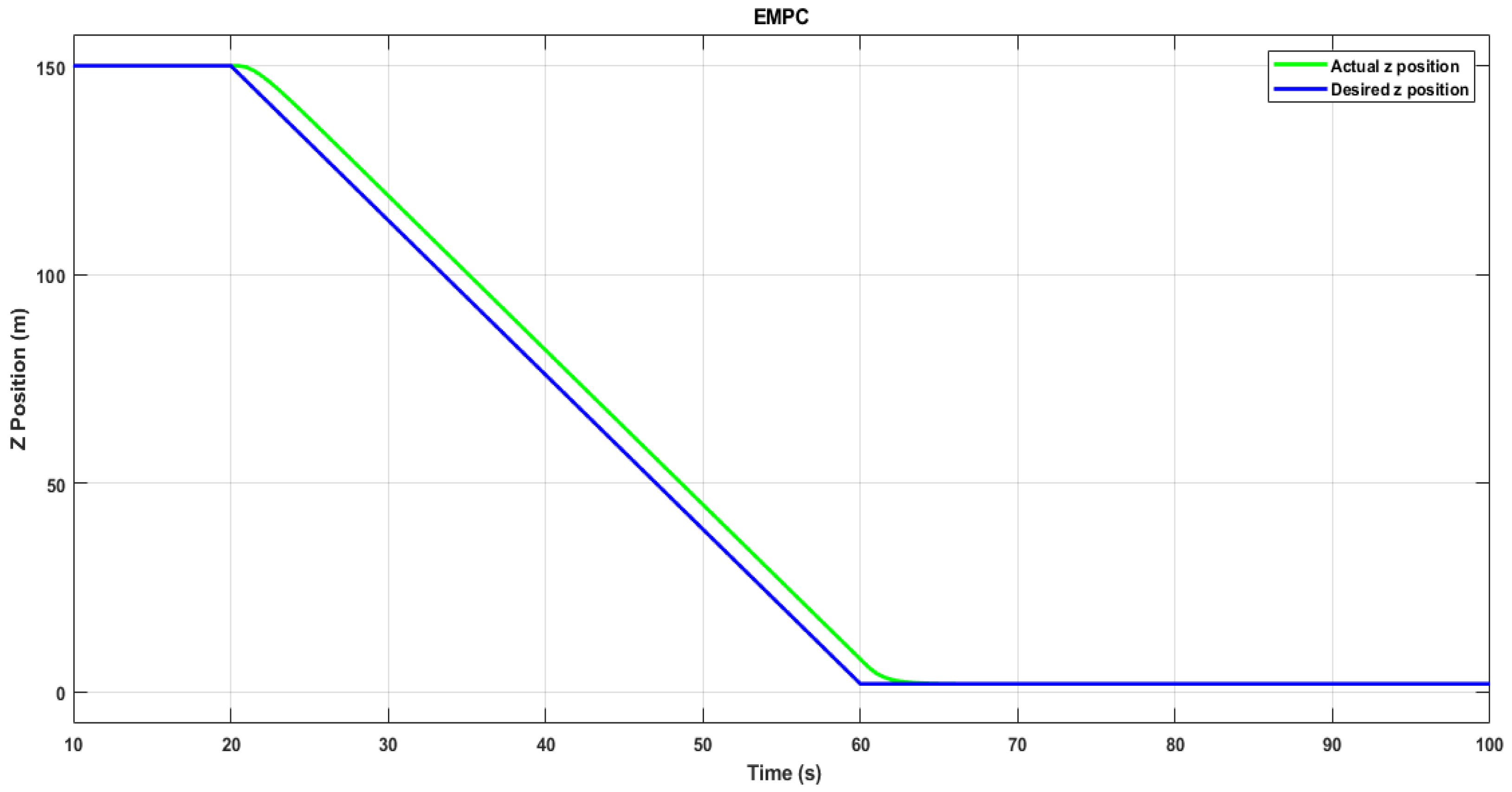
Figure 3 shows the performance results for the MPC algorithm. The MPC algorithm shows a good tracking ability with no overshoot as compared to the PID control algorithm. Another predictive control method is proposed in this study to have less computational time: the Explicit MPC. Thus, this predictive control algorithm is implemented on the quadrotor for powered descent in the same way as the previous control algorithms.
Figure 4 shows the tracking ability and effectiveness of Explicit MPC for the stated landing scenario.
4.2. Scenario 2
In this section, another scenario is designed for Mars-powered where non-zero x and y positions are defined in the reference trajectory. The starting value for x and y is taken as 2 m whereas the starting value for the z-axis is the same as in the previous case. The lander faces disturbances and atmospheric uncertainty, which makes the lander divert from the planned trajectory. Thus, a disturbance signal is also applied along the x-axis, which disturbs the quadrotor to detract it from the desired path. Restriction of the horizontal position of the lander is required so that it cannot go beyond certain limits. Such a safe region is defined in a form of a square. Thus, the horizontal limits of 2 m along the x-axis and the y-axis are considered as output constraints. It is assumed that if the quadrotor goes beyond this boundary, it will face obstacles similar to what a planetary lander faces while landing on non-cooperative sites. Moreover, the thrust input is also limited to a level to validate MPC’s input constraint handling ability. All the control algorithms used in the previous section are implemented in this section to check the performance for the stated scenario in this section. This scenario illustrates the importance of constraints handling.
At first, the PID control algorithm is implemented to track the stated trajectory with a disturbance at 30 s. It can be seen from
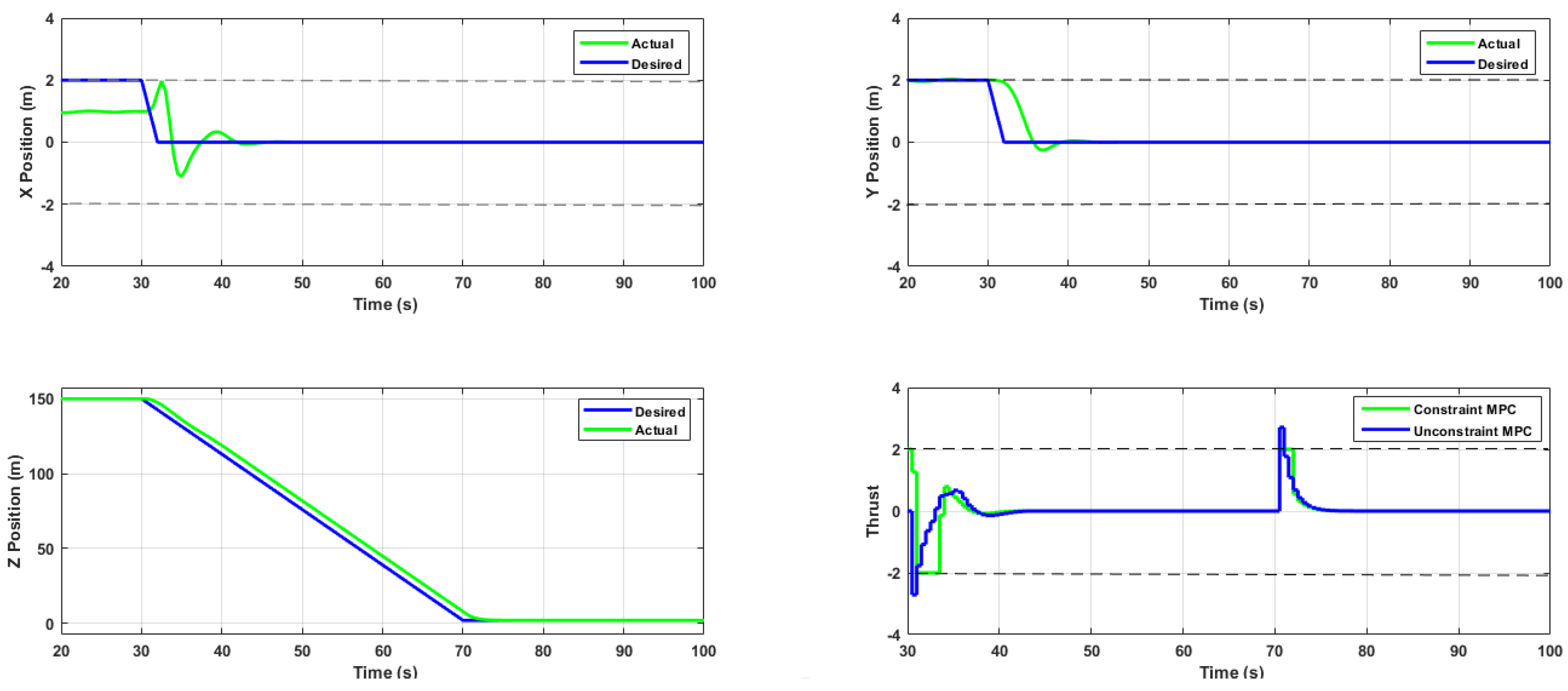
Figure 5 that the PID control algorithm is unable to restrict the system under the boundary limits, which may cause an unsuccessful landing. Furthermore, PID is unable to restrict the input limitations of the system. The same is the case with LQR, which is also unable to show the constraint behavior. Although PID and LQR have a very good tracking ability, they do not show a good performance in a constraint environment. MPC fulfills the constraint drawbacks of PID and LQR as it can give a better performance in a constraint environment by considering the input and output constraints during optimization. Thus, the MPC algorithm is explored for this case to handle the constraint environment. During the design of the algorithm, an output constraint of 2 m is set for the x position of the quadrotor. Similarly, an input constraint for the thrust input of the quadrotor is implemented during the design of the predictive control algorithm. The constraint performance of the quadrotor is given in
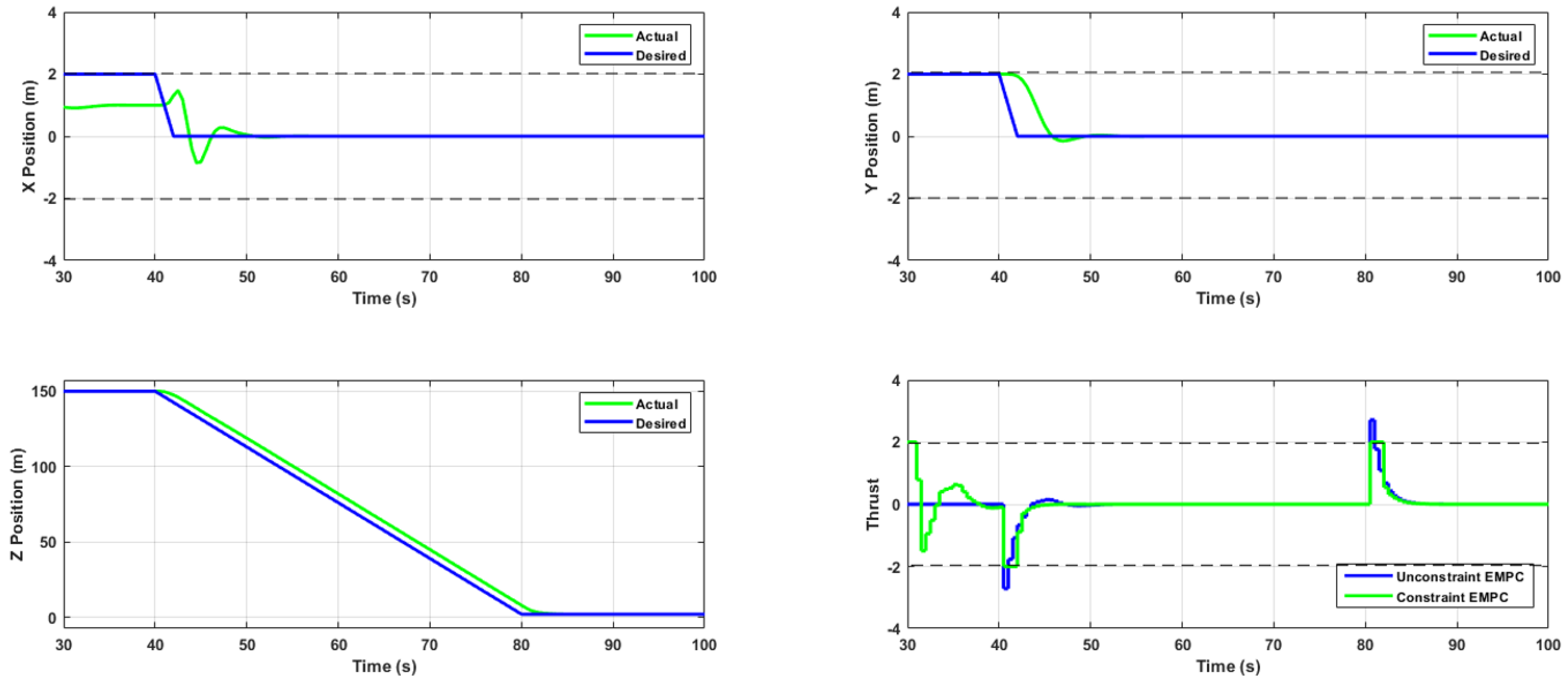
Figure 6. The output variable x of a quadrotor does not go beyond the boundary of 2 m. Similarly, the unconstraint and constraint thrust input is also shown in the fourth section of this figure. Moreover, the tracking performance along the y and z-axis is also shown in the same figure. After implementing MPC for the stated scenario in this section, EMPC is implemented as well. While implementing constraints, EMPC for a MIMO system is difficult compared to implicit MPC. Proper ranges for states, inputs, outputs, and references must be defined properly while designing an EMPC. An EMPC is implemented on the quadrotor for this scenario and the constraint performance is given in
Figure 7. A constraint of 2 m is set for the x output of the system. Like MPC, it shows good constraint behavior and never goes beyond the boundary limits. When generating a control signal by EMPC, 992 solution regions are explored for the constraint system used in the simulation. These solutions are saved to the controller and it gives the optimal and predicted solution without calculation during the run time, thus it reduces the execution time.
- ⮚
The successful constraint behavior of the proposed control algorithm on the stated scenarios shows the feasibility of these predictive algorithms for Mars-powered descent.
- ⮚
The performance of the proposed predictive control algorithms for Mars-powered descend was evaluated based on the constraint handling, feasibility, and computational time.
- ⮚
It is summarized in
Table 1, which gives the computational time, constraints violations, and feasibility, which were the main objectives of this research.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}