
Prolongation of Battery Lifetime for Electric Buses through Flywheel Integration

 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
2. State-of-the-Art
3. Materials and Methods
3.1. Bus and Routes
3.2. Simulation Model
3.3. Energy Management Strategy
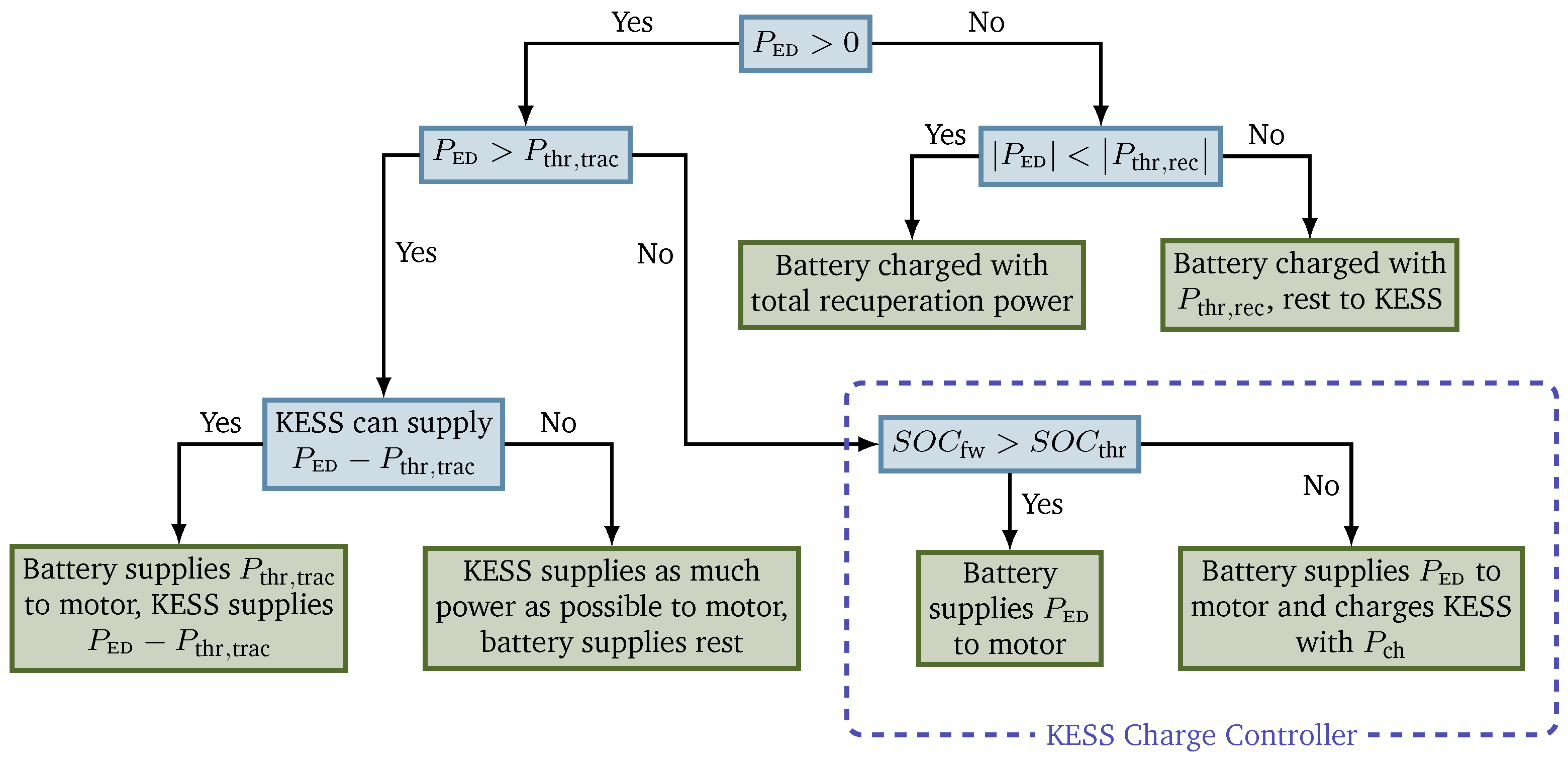
3.3.1. Rule-Based Control Strategy
3.3.2. Nonlinear Model Predictive Control
Simplified Battery and KESS Models for the NMPC
NMPC Implementation
4. Results
4.1. Energy Management Strategies
4.2. Flywheels
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BEB | Battery electric bus |
| BR | Braunschweig driving cycle |
| E11 | Espoo bus line 11 |
| FW1 | Flywheel configuration one |
| FW2 | Flywheel configuration two |
| FW3 | Flywheel configuration three |
| NMPC | Nonlinear model predictive control |
| RB | Rule-based |
| RB1 | Rule-based control without KESS charge controller |
| RB2 | Rule-based control with KESS charge controller |
| TH | Threshold |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | FW1 | FW2 | FW3 | Unit | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| BEB | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | ||
| AVG traction C-rate | 0.60 | 0.36 | 0.35 | 0.35 | 0.35 | 0.35 | 0.34 | 0.37 | 0.37 | 0.37 | |
| SD traction C-rate | 0.64 | 0.32 | 0.28 | 0.26 | 0.37 | 0.26 | 0.22 | 0.37 | 0.30 | 0.33 | |
| AVG recup. C-rate | 0.31 | - | - | 0.003 | - | - | - | - | - | 0.01 | |
| SD recup. C-rate | 0.24 | - | - | 0.002 | - | - | - | - | - | 0.01 | |
| Parameter | FW1 | FW2 | FW3 | Unit | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| BEB | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | ||
| AVG traction C-rate | 0.68 | 0.44 | 0.44 | 0.42 | 0.43 | 0.43 | 0.42 | 0.46 | 0.45 | 0.45 | |
| SD traction C-rate | 0.77 | 0.44 | 0.32 | 0.28 | 0.42 | 0.31 | 0.21 | 0.49 | 0.36 | 0.36 | |
| AVG recup. C-rate | 0.61 | 0.14 | 0.14 | 0.12 | - | - | - | - | - | 0.01 | |
| SD recup. C-rate | 0.47 | 0.03 | 0.03 | 0.03 | - | - | - | - | - | 0.04 | |
References
- European Environment Agency (EEA). Greenhouse Gas Emissions from Transport in Europe. 2019. Available online: https://www.eea.europa.eu/data-and-maps/indicators/transport-emissions-of-greenhouse-gases/transport-emissions-of-greenhouse-gases-12 (accessed on 3 June 2020).
- General Secretariat of the European Council. European Council (23 and 24 October 2014) Conclusions, EUCO 169/14, CO EUR 13, CONCL 5. arXiv 2014, arXiv:1011.1669v3. [Google Scholar]
- Li, Z.; Khajepour, A.; Song, J. A comprehensive review of the key technologies for pure electric vehicles. Energy 2019, 182, 824–839. [Google Scholar] [CrossRef]
- Farhadi, M.; Mohammed, O. Energy Storage Technologies for High-Power Applications. IEEE Trans. Ind. Appl. 2016, 52, 1953–1962. [Google Scholar] [CrossRef]
- GKN Develops Electric Flywheel Hybrid System for Buses. Available online: https://www.sae.org/news/2015/02/gkn-develops-electric-flywheel-hybrid-system-for-buses (accessed on 10 December 2020).
- Conteh, M.A.; Nsofor, E.C. Composite flywheel material design for high-speed energy storage. J. Appl. Res. Technol. 2016, 14, 184–190. [Google Scholar] [CrossRef]
- Lambert, T.N.; Washburn, C.M.; Davis, D.J.; Anderson, B.J.; Calkins, D.; Stong, J.; Massey, L. Next Generation Composite Materials for Flywheel Development; Sandia National Laboratories: Albuquerque, NM, USA, 2012.
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Comparative analysis of two hybrid energy storage systems used in a two front wheel driven electric vehicle during extreme start-up and regenerative braking operations. Energy Convers. Manag. 2017, 144, 69–87. [Google Scholar] [CrossRef]
- Ratniyomchai, T.; Hillmansen, S.; Tricoli, P. Recent developments and applications of energy storage devices in electrified railways. IET Electr. Syst. Transp. 2014, 4, 9–20. [Google Scholar] [CrossRef]
- Hedlund, M.; Lundin, J.; de Santiago, J.; Abrahamsson, J.; Bernhoff, H. Flywheel energy storage for automotive applications. Energies 2015, 8, 10636–10663. [Google Scholar] [CrossRef] [Green Version]
- Ayodele, T.; Ogunjuyigbe, A.; Oyelowo, N. Hybridisation of battery/flywheel energy storage system to improve ageing of lead-acid batteries in PV-powered applications. Int. J. Sustain. Eng. 2020, 13, 337–359. [Google Scholar] [CrossRef]
- Sabri, M.F.; Danapalasingam, K.A.; Rahmat, M.F. A review on hybrid electric vehicles architecture and energy management strategies. Renew. Sustain. Energy Rev. 2016, 53, 1433–1442. [Google Scholar] [CrossRef]
- Mouratidis, P.; Schüßler, B.; Rinderknecht, S. Hybrid Energy Storage System consisting of a Flywheel and a Lithium-ion Battery for the Provision of Primary Control Reserve. In Proceedings of the 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019. [Google Scholar]
- Hou, J.; Sun, J.; Hofmann, H. Control development and performance evaluation for battery/flywheel hybrid energy storage solutions to mitigate load fluctuations in all-electric ship propulsion systems. Appl. Energy 2018, 212, 919–930. [Google Scholar] [CrossRef]
- Sessa, S.D.; Tortella, A.; Andriollo, M.; Benato, R. Li-ion battery-flywheel hybrid storage system: Countering battery aging during a grid frequency regulation service. Appl. Sci. 2018, 8, 2330. [Google Scholar] [CrossRef] [Green Version]
- Sessa, S.D.; Andriollo, M.; Tortella, A. Simulation Results from a Kinetic-Electrochemical Energy Storage Model for Network Frequency Regulation. In Proceedings of the AEIT International Annual Conference (AEIT), Florence, Italy, 18–20 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jaafar, A.; Akli, C.R.; Sareni, B.; Roboam, X.; Jeunesse, A. Sizing and energy management of a hybrid locomotive based on flywheel and accumulators. IEEE Trans. Veh. Technol. 2009, 58, 3947–3958. [Google Scholar] [CrossRef] [Green Version]
- Dhand, A.; Pullen, K. Optimal energy management for a flywheel-assisted battery electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 229, 1672–1682. [Google Scholar] [CrossRef] [Green Version]
- Foley, I. Williams Hybrid Power—Flywheel energy storage. Engine Expo 2013. [Google Scholar] [CrossRef]
- Hansen, J.; O’Kain, D. An Assessment of Flywheel High Power Energy Storage Technology for Hybrid Vehicles; Technical Report; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2011.
- Plomer, J.; First, J. Flywheel energy storage retrofit system for hybrid and electric vehicles. In Proceedings of the Smart Cities Symposium Prague (SCSP 2015), Prague, Czech Republic, 24–25 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Daberkow, P.A.; Ehlert, M.; Kaise, D. Electric Car Operation and Flywheel Energy Storage. In Conference on Future Automotive Technology; Lienkamp, M., Ed.; Springer: Wiesbaden, Germany, 2013. [Google Scholar] [CrossRef]
- Olivier, B.; Vinasse, J.M.; Lajnef, W.; Azzopardi, S.; Woirgard, E. Principle, design and experimental validation of a flywheel-battery hybrid source for heavy-duty electric vehicles. IET Electr. Power Appl. 2007, 1, 643–656. [Google Scholar]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Energy management of a battery-flywheel storage system used for regenerative braking recuperation of an Electric Vehicle. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 2034–2039. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Integration of different modules of an electric vehicle powered by a battery-flywheel storage system during traction operation. In Proceedings of the IEEE International Multidisciplinary Conference on Engineering Technology (IMCET), Beirut, Lebanon, 2–4 November 2016; pp. 126–131. [Google Scholar] [CrossRef]
- Santucci, A.; Sorniotti, A.; Lekakou, C. Power split strategies for hybrid energy storage systems for vehicular applications. J. Power Sources 2014, 258, 395–407. [Google Scholar] [CrossRef] [Green Version]
- Lajunen, A. Lifecycle costs and charging requirements of electric buses with different charging methods. J. Clean. Prod. 2018, 172, 56–67. [Google Scholar] [CrossRef]
- Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City bus powertrain comparison: Driving cycle variation and passenger load sensitivity analysis. Energies 2018, 11, 1755. [Google Scholar] [CrossRef] [Green Version]
- Lajunen, A.; Lipman, T. Lifecycle cost assessment and carbon dioxide emissions of diesel, natural gas, hybrid electric, fuel cell hybrid and electric transit buses. Energy 2016, 106, 329–342. [Google Scholar] [CrossRef]
- Vepsäläinen, J.; Kivekäs, K.; Otto, K.; Lajunen, A.; Tammi, K. Development and validation of energy demand uncertainty model for electric city buses. Transp. Res. Part D Transp. Environ. 2018, 63, 347–361. [Google Scholar] [CrossRef]
- Groot, J. State-of-Health Estimation of Li-Ion Batteries: Cycle Life Test Methods. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 2012. Available online: http://komar.in/files/JensGroot.pdf (accessed on 6 February 2021).
- Vetter, J.; Novák, P.; Wagner, M.R.; Veit, C.; Möller, K.C.; Besenhard, J.O.; Winter, M.; Wohlfahrt-Mehrens, M.; Vogler, C.; Hammouche, A. Ageing mechanisms in lithium-ion batteries. J. Power Sources 2005, 147, 269–281. [Google Scholar] [CrossRef]
- Ecker, M.; Nieto, N.; Käbitz, S.; Schmalstieg, J.; Blanke, H.; Warnecke, A.; Sauer, D.U. Calendar and cycle life study of Li(NiMnCo)O2-based 18,650 lithium-ion batteries. J. Power Sources 2014, 248, 839–851. [Google Scholar] [CrossRef]
- Spotnitz, R. Simulation of capacity fade in lithium-ion batteries. J. Power Sources 2003, 113, 72–80. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J. A comparative study of commercial lithium ion battery cycle life in electric vehicle: Capacity loss estimation. J. Power Sources 2014, 268, 658–669. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J. Cycle life of commercial lithium-ion batteries with lithium titanium oxide anodes in electric vehicles. Energies 2014, 7, 4895–4909. [Google Scholar] [CrossRef] [Green Version]
- Rothgang, S.; Rogge, M.; Becker, J.; Sauer, D.U. Battery design for successful electrification in public transport. Energies 2015, 8, 6715–6737. [Google Scholar] [CrossRef] [Green Version]
- Jafari, M.; Gauchia, A.; Zhao, S.; Zhang, K.; Gauchia, L. Electric Vehicle Battery Cycle Aging Evaluation in Real-World Daily Driving and Vehicle-to-Grid Services. IEEE Trans. Transp. Electrif. 2017, 4, 122–134. [Google Scholar] [CrossRef]
- Namor, E.; Torregrossa, D.; Sossan, F.; Cherkaoui, R.; Paolone, M. Assessment of battery ageing and implementation of an ageing aware control strategy for a load leveling application of a lithium titanate battery energy storage system. In Proceedings of the IEEE 17th Workshop on Control and Modeling for Power Electronics (COMPEL 2016), Trondheim, Norway, 27–30 June 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Schneider, M. Ganzheitlicher Modellbasierter Entwurf von Kinetischen Energiespeichern in Außenläuferbauform. Ph.D. Thesis, TU Darmstadt, Darmstadt, Germany, 2019. [Google Scholar]
- Quurck, L.; Richter, M.; Schneider, M.; Franz, D.; Rinderknecht, S. Design and practical realization of an innovative flywheel concept for industrial applications. Tech. Mech. 2017, 37, 151–160. [Google Scholar] [CrossRef]
- Carter, R.; Cruden, A.; Hall, P.J. Optimizing for efficiency or battery life in a battery/supercapacitor electric vehicle. IEEE Trans. Veh. Technol. 2012, 61, 1526–1533. [Google Scholar] [CrossRef]
- Adamy, J. Nichtlineare Systeme und Regelungen, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 2. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEVs: A review. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M.; Ricker, N. Model Predictive Control Toolbox for Use with MATLAB, 2nd ed.; The MathWorks Inc.: Natick, MA, USA, 2015. [Google Scholar]
- Song, Z.; Hofmann, H.; Li, J.; Hou, J.; Han, X.; Ouyang, M. Energy management strategies comparison for electric vehicles with hybrid energy storage system. Appl. Energy 2014, 134, 321–331. [Google Scholar] [CrossRef]
- Vepsäläinen, J.; Ritari, A.; Lajunen, A.; Kivekäs, K.; Tammi, K. Energy Uncertainty Analysis of Electric Buses. Energies 2018, 11, 3267. [Google Scholar] [CrossRef] [Green Version]









| Application | Name | Peak Power in kW | Energy in Wh | Mass in kg | Max. Speed in rpm |
|---|---|---|---|---|---|
| Racing cars | GKN Porsche GT3R Flywheel | 180 | 375 | 57 | |
| GKN Audi e-tron 2013 Flywheel | 150 | 97 | 27 | ||
| Flybrid Systems LLP | 110 | 111 | 25 | 60,000 | |
| Light-duty & heavy-duty vehicles | |||||
| GKN Gyrodrive FW Hybrid System | 120 | 360 | 60 | 36,000 | |
| Ricardo UK Ltd. | 60 | 220 | 30 | 60,000 | |
| Powerthru | 190 | 667 | 147 | 52,500 | |
| L-3 CMM * | 300 | 2000 | 400 | 12,000 | |
| HyKinesys | 100 | 300 | 50 | 20,000 | |
| Flywheel Energy Systems Inc. | 120 | 750 | 150 | 28,000 |
| Parameter | Value | Unit | |
|---|---|---|---|
| BR | E11 | ||
| Duration | 1740 | 1548 | |
| Distance | 10.9 | 10.2 | |
| Max. speed | 58.2 | 58.4 | |
| Average speed | 22.5 | 23.8 | |
| Number of stops | 28 | 18 | - |
| Stops per km | 2.6 | 1.7 | - |
| Max. acceleration | 2.4 | 1.6 | |
| Max. deceleration | 3.6 | 1.9 | |
| Aggressiveness | 0.24 | 0.15 | |
| Parameter | Symbol | Value | Unit | |
|---|---|---|---|---|
| General | Curb mass | 10,500 | ||
| Vehicle frontal area | 6.2 | |||
| Coefficient of drag | 0.5 | – | ||
| Differential gear ratio | 4.93 | – | ||
| Differential gear efficiency | 98 | |||
| Tire dynamic radius | 0.43 | |||
| Total inertia at output axle | 1.95 | |||
| Rolling resistance coefficient | 0.008 | – | ||
| Air density (for ) | 1.32 | |||
| Ambient temperature | −6 | |||
| Auxiliary power demand | 5.16 | |||
| Motor | Maximum motor power | 180 | ||
| Number of pole pairs | p | 6 | – | |
| Stator armature inductance | 0.3 | |||
| Stator resistance | 157 | |||
| Battery | Number of cells in series | 300 | - | |
| Number of cells in parallel | 4 | - | ||
| Nominal voltage | 690 | |||
| Energy capacity | 55.2 | |||
| Coulombic nominal capacity | 80 | |||
| Internal resistance | 87.5 | |||
| Internal capacitance | 0.8 |
| Parameter | Symbol | Value | Unit | ||
|---|---|---|---|---|---|
| FW1 | FW2 | FW3 | |||
| Maximum power | 100 | 150 | 130 | ||
| Available kinetic energy | 1.10 | 1.50 | 0.75 | ||
| Maximum kinetic energy | 1.93 | 2.38 | 1.40 | ||
| Inertia of rotor | 4.63 | 6.28 | 4.37 | ||
| Energy density of rotor | 7.43 | 8.72 | 5.43 | ||
| Maximum speed | 16552 | 15,790 | 14,520 | ||
| Base speed limit | 11,606 | 8898 | 8923 | ||
| Minimum state of charge | 41 | 35 | 45 | % | |
| Number of pole pairs | p | 5 | 6 | 6 | - |
| Inner diameter of rotor | 332 | 360 | 342 | ||
| Outer diameter of rotor | 435 | 467 | 430 | ||
| Height of rotor | 743 | 768 | 720 | ||
| Diameter of containment | 465 | 497 | 460 | ||
| Height of containment | 833 | 858 | 810 | ||
| Mass of rotor | 148 | 172 | 138 | ||
| Mass of stator | 161 | 204 | 165 | ||
| Mass of containment | 60 | 67 | 58 | ||
| Overall mass of KESS | 368 | 442 | 361 | ||
| Parameter | Symbol | E11 | BR | Unit | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Configuration | FW1 | FW2 | FW3 | FW1 | FW2 | FW3 | ||||||||
| Charging power | 0 | 15 | 0 | 15 | 0 | 10 | 0 | 20 | 0 | 20 | 0 | 20 | ||
| Traction TH | 40 | 30 | 30 | 30 | 40 | 30 | 50 | 30 | 50 | 30 | 50 | 30 | ||
| Recuperation TH | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| Parameter | FW1 | FW2 | FW3 | Unit | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| BEB | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | ||
| Max. battery current | 272 | 151 | 153 | 123 | 302 | 154 | 68 | 304 | 304 | 90 | |
| RMS battery current | 62.5 | 38.6 | 36.2 | 34.3 | 40.4 | 34.6 | 32.1 | 42.2 | 38.2 | 38.8 | |
| Battery energy losses | 147 | 56 | 49 | 44 | 62 | 45 | 39 | 67 | 55 | 57 | |
| KESS energy losses | - | 903 | 905 | 916 | 1026 | 1066 | 1050 | 938 | 954 | 977 | |
| Energy throughput | 29.1 | 24.9 | 24.5 | 23.6 | 24.2 | 24.0 | 23.2 | 25.9 | 25.7 | 24.9 | |
| Battery life increase | - | 16.9 | 18.7 | 23.4 | 20.4 | 21.4 | 25.4 | 12.3 | 13.3 | 17.0 | % |
| Parameter | FW1 | FW2 | FW3 | Unit | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| BEB | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | RB1 | RB2 | NMPC | ||
| Max. battery current | 346 | 350 | 286 | 157 | 286 | 328 | 95 | 352 | 331 | 120 | |
| RMS battery current | 78.8 | 49.7 | 43.7 | 40.4 | 48.2 | 42.6 | 37.7 | 53.7 | 45.7 | 45.3 | |
| Battery energy losses | 263 | 105 | 81 | 69 | 98 | 77 | 60 | 122 | 88 | 87 | |
| KESS energy losses | - | 1002 | 1046 | 1060 | 1174 | 1197 | 1201 | 1059 | 1109 | 1123 | |
| Energy throughput | 42.2 | 34.8 | 34.4 | 33.1 | 34.3 | 33.9 | 32.9 | 36.2 | 35.6 | 34.5 | |
| Battery life increase | - | 21.0 | 22.5 | 27.4 | 22.8 | 24.5 | 28.3 | 16.6 | 18.3 | 22.1 | % |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glücker, P.; Kivekäs, K.; Vepsäläinen, J.; Mouratidis, P.; Schneider, M.; Rinderknecht, S.; Tammi, K. Prolongation of Battery Lifetime for Electric Buses through Flywheel Integration. Energies 2021, 14, 899. https://0-doi-org.brum.beds.ac.uk/10.3390/en14040899
Glücker P, Kivekäs K, Vepsäläinen J, Mouratidis P, Schneider M, Rinderknecht S, Tammi K. Prolongation of Battery Lifetime for Electric Buses through Flywheel Integration. Energies. 2021; 14(4):899. https://0-doi-org.brum.beds.ac.uk/10.3390/en14040899
Chicago/Turabian StyleGlücker, Philipp, Klaus Kivekäs, Jari Vepsäläinen, Panagiotis Mouratidis, Maximilian Schneider, Stephan Rinderknecht, and Kari Tammi. 2021. "Prolongation of Battery Lifetime for Electric Buses through Flywheel Integration" Energies 14, no. 4: 899. https://0-doi-org.brum.beds.ac.uk/10.3390/en14040899