1. Introduction
UAVs, also known as drones, are aircrafts, which can be remotely operated by a person, or by pre-programmed operation systems, thus allowing them to fly autonomously. Some UAV features, such as high mobility, easy deployment and mostly the autonomous operation tend to find appealing solutions in a wide variety of applications including search and rescue, agriculture, civil, public safety, scientific data gathering and numerous others. Thus, UAVs already have a remarkably high market potential which is growing rapidly [
1].
In addition to the above-mentioned applications, UAVs also provide a very promising solution to many problems in the specific field, ranging from ensuring coverage in emergency situations and rural areas to network densification for highly populated areas, offering 5G coverage, taking into account the challenges faced by communication networks to manage increasing demand and different services (see e.g., [
2,
3,
4,
5]). Most of these approaches are inspired by the implementation of an opportunistic network, where users connect to the Base Stations (BSs) carried by flying UAVs.
However, in order to be effectively deployed, several challenges need to be tackled related to autonomous mobility, communication and control, among which the energy efficiency is considered of primary importance given that it directly impacts the flight range of the UAV. In particular, when an UAV-based 5G architecture is assumed, different issues arise [
6,
7,
8], such as the efficient control of the UAV-based BSs swarm and their efficient energy consumption in order to prolong the operation of the opportunistic network.
In recent times, much attention has been given to the optimal autonomous planning and management of opportunistic drone-supported networks [
9,
10]. The general problem of multi-period capacitated network architecture, involving flow models using graph theory [
11], is closely related to optimising these problems. However, although the optimisation problem has been efficiently addressed offline for various cases, in reality, the highly divert flight conditions, require continuous real-time analysis in order the autonomous command and control component to produce the most efficient flight plan in real time during the mission. A UAV in order to respond to this real-time demanding computational task, must be equipped with on-board powerful HW, capable of performing in real-time complex AI tasks for analysing the continuous data flow of the flight statistics. Such a highly computational capable UAV requires high energy consumption, significantly reducing its mission capabilities to significantly small time periods.
The scope of this paper is focused on these issues of autonomous energy-efficient mission planning optimisation of UAV-based BSs by exploiting the edge and low latency capabilities of the modern communication networks and UAVs’ technology advances, based on which it is imperative to softwarise currently onboard HW components from the UAV and offload them at the edge of the network. Such an approach allows the real-time analysis of high computational flight-data resulting in the optimisation of autonomous flight actions, such as recharging, moving and hovering, that finally compose an autonomous mission. By exploiting the low network latency to deliver the UAV control commands and decomposing the autonomous flight plan analysis and optimisation component between the UAV and the edge of the network, this paper presents an energy efficient UAV capable of optimising the flight and prolonging in an autonomous way the creation of an opportunistic network when is needed.
A technology enabler that provides low latency and allows the softwarisation of components and split of them between the client computing node and the edge of the network is the fifth generation (5G) of mobile networks. 5G encompasses both terrestrial and satellite networks with such softwarisation and offloading paradigms [
12,
13] and provides also native support of MEC at multi Gbps data speeds with ultra-reliable low latency communications (URLLC), as well as greater bandwidth and throughput (eMBB) [
14]. By splitting the FCS between the UAV and the MEC of the 5G network, allows the execution of advanced optimisation techniques in real-time during the mission, analysing all the involved offline data (e.g., coverage area, 5G equipment weight, maximum flight distance etc.) and online flight data from UAV-integrated sensors (e.g., wind speed, flight level, battery status, distance from charging base etc.). Such execution of sophisticated optimisation techniques provides to the flight controller on-the-fly optimal decisions in the definition of the flight plan, minimizing unnecessary UAV actions and movements, reassuring a smooth hovering flight, and therefore minimizing the respective energy consumption. Therefore, this processing offloading in combination with the execution of advanced optimisation techniques alleviate the UAV from intense battery consumption and enable it to perform complex and sophisticated flight plans. In fact, standardization endeavours are progressively incorporating UAVs with 5G networks in order to support further development from the relevant industries.
To this end, this paper discusses the amalgamation of UAVs and 5G cellular networks by splitting the FCS between the UAV and the MEC of the 5G network, as an auspicious solution for realising energy efficiency of autonomous UAVs flights by enabling them to execute at the MEC, sophisticated and AI-driven optimisation techniques of the collected flight data in order to support real-time flight decisions, which result to efficient flight during the deployment of an opportunistic 5G network in which users communicate with the BSs held by flying UAVs. By this way, the solution of the optimisation problem for maximizing the energy efficiently of the flying UAVs/BSs is achieved independently of the flying conditions and the opportunistic network can be maintained for longer time periods. By exploiting the MEC architectural feature of a real 5G infrastructure [
15,
16], the paper presents a Proof-of-Concept (POC) implementation of this 5G-enabled UAV that has softwarised its FCS component and has offloaded it at the edge of the 5G network, being capable of executing in real-time sophisticated resource optimisation techniques. Furthermore, in such an implementation, the Control and Command (C2) channel of the UAV is aired over 5G, allowing to the UAV to execute BTLOS missions. Finally, a test flight of the POC UAV has been performed, demonstrating proper functionality of the drone with the C2 channel delivered over 5G and readiness for hosting at the edge optimisation techniques. The benchmarking of various real-time optimisation techniques on the developed POC 5G-enabled UAV is not included in this work, and is a currently on-going activity, which will be reported in a future research paper, which will be dedicated to this comparison.
The rest of this paper is organized as follows.
Section 2, provides a 5G background analysis and a reference is made on the key points of 5G networks, discussing its impact on UAV industry. In
Section 3, we present the experimental 5G infrastructure and the setup that used for the 5G-enabled UAV, while
Section 4 introduces the features and components of the prototype UAV that has been developed for the trial flight.
Section 5 presents the field trials and results. Finally,
Section 6 discusses the paper results and
Section 7 concludes the paper.
2. 5G System Impact on UAVs
2.1. Impact of 5G Key Features on UAVs
Using 5G networks for flying vehicles is an opportunity to provide stable connectivity, while reducing scale, weight and power usage costs and specifications, as well as enhancing UAV multimedia provision [
17]. 5G seeks to provide a wide variety of wireless services across multiple access channels and multi-layer networks delivered to the end user. To that end, it uses a smarter Radio Access Networks (RANs) architecture, no longer limited by the proximity of the base station or complex infrastructure. Some of the technology enablers that support 5G networks and impacts the UAS are:
5G Spectrum and Frequency: UAV connectivity for 4G LTE [
18] has been already widely studied and 5G NR has substantially higher capabilities. Several frequency ranges are devoted to the current 5G radio (NR). The millimetre wave is defined as the frequencies between 30 GHz and 300 GHz, which can provide high throughput and low latency communication between the UAV and a remote command centre. Communication in the mmwave bands along with other transmissions above 6 GHz has emerged as a central component of the 3GPP Fifth Generation (5G) NR standard [
19] due to their enormous potential but can be ineffective for long-distance communication [
19]. Thus, in more densely populated areas sub-6 GHz frequencies are repurposed for 5G, which can be used for enabling long-distance autonomous Beyond Visual Line-of-Sight (BVLOS) UAV missions.
Beamfoaming: New obstacles for 5G broadcasting communications are the specific characteristics of UAV systems, such as three-dimensional space agility and the substantial scale, weight and power constraints. To enhance the capability of signal reception in UAVs, a beamforming technology is required and 5G offers this techno-logical advantage. 5G Multiple Input Multiple Output (MIMO) arrays with thousands of small antennas combined in a single formation can be used to evaluate the most effective transmission path to each end-user unit (e.g., UAV).
Multi Access Edge Computing: 5G NR uses modern physical layer numerology that significantly decreases the latency of the Radio Access Network (RAN), which, when combined with MEC [
20] capabilities in the vicinity of the radio network, enables the C2 link to achieve a very low latency. As an advancement of cloud computing, MEC is a crucial element of the infrastructure that takes apps from centralized data centres to the Edge network, which means closer to the end user and their computers, offering advantages such as low latency, high bandwidth, and real-time access to RAN information. Besides using 5G for communicating with drones, the Drone Pilot will be hosted at the MEC; hence guaranteeing very low-latency communication for the C2 link, as this paper envisages. Moreover, the softwarisation of the pilot and the offloading of it at the edge of computing node of the network, alleviates the UAV from additional energy consumption, providing an energy-efficient UAV variant.
Network Function Virtualisation (NFV) and Software Defined Networks (SDN): Another enabler for 5G is NFV which softwarises hardware network functions such as routers and firewalls and deploys them as virtualised instances with the 5G network, usually at its edge, utilizing the MEC infrastructure. In the UAV industry, the virtualisation process affects various components that are offloaded from the UAV, such as the pilot and the C2 components, as this paper presents. NFV usually couples with SDN, which introduces support for dynamic programmability of network nodes enabling the separation of control and date planes [
21].
Network Slicing: The concept of network slicing allows for multiple virtual networks to simultaneously run on-top of a shared physical network infrastructure. In order to meet the performance of different networks and devices, such as sporting activities, festival parties, etc., 5G embraces three types of new scenarios, URLLC, eMBB, and massive machine-type communications (mMTC). Therefore, network slicing is one function that is particularly interesting for the UAV. It makes a secure slice of aerial vehicle control independent of contact with payloads, such as video streaming to the ground.
2.2. 5G Core Network Impact on UAVs
As specified by 3GPP [
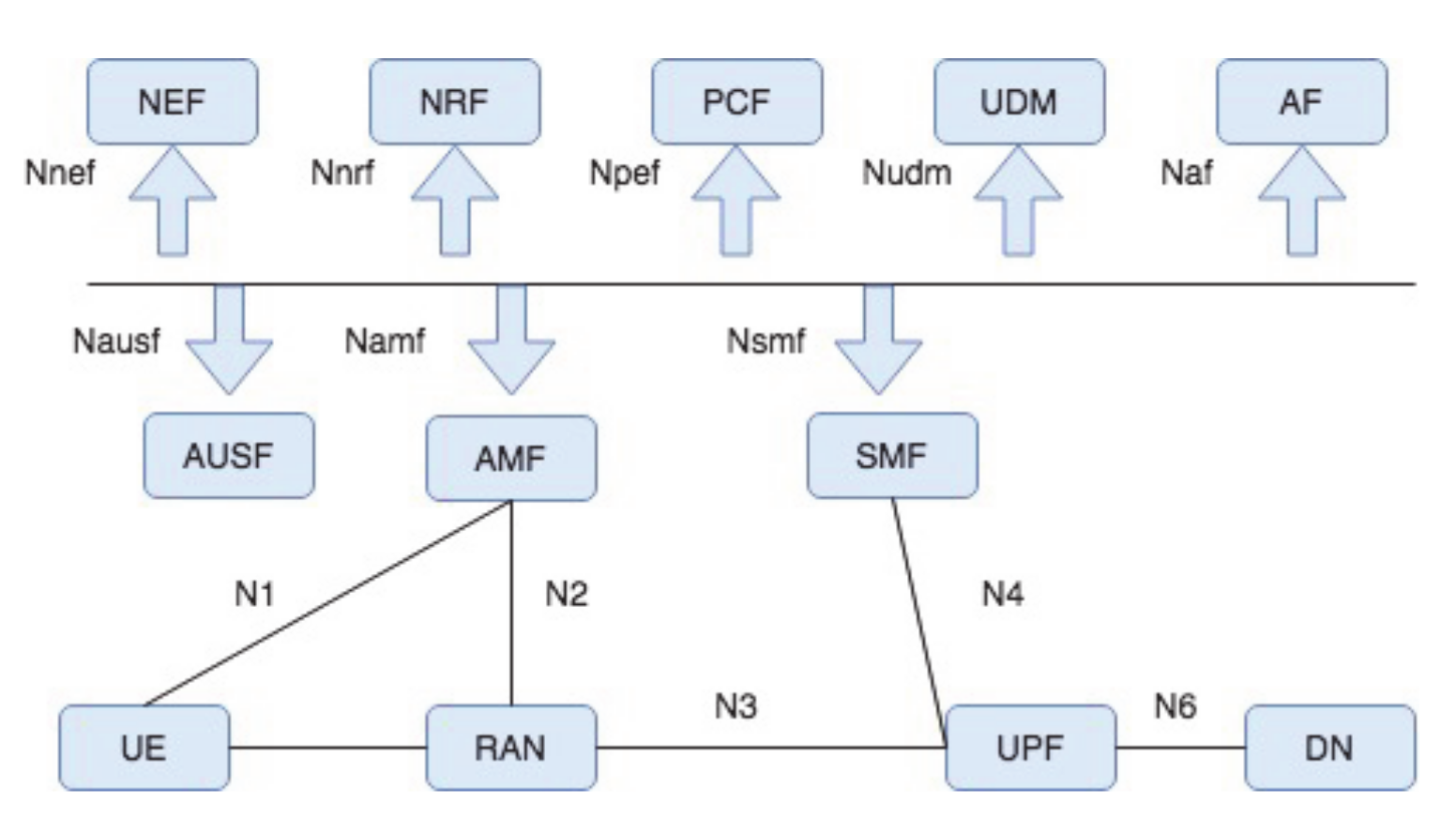
22], the new 5G Network Core uses a cloud-aligned Service-Based Architecture (SBA), as
Figure 1 depicts, that covers all 5G functions and interactions, including authentication, protection, session management and end-user traffic aggregation. It also emphasizes NFV, with virtualised functions deployed using the MEC infrastructure, as an integral design principle. The 5G core network’s main objective is to isolate the control plane from the data plane by building it as a network feature.
In order to achieve effective and more scalable network slicing, another important principle is to eliminate dependencies between the Access Network (AN) and the Core Network (CN) and modularize the function architecture. The following key network functions (NFs) are part of the 5G core network architecture:
Access and Mobility Management Function (AMF) is responsible for access control and mobility.
Session Management Function (SMF) configures sessions according to policy.
User Plane Function (UPF) manages and forwards users’ data traffic.
Authentication Server Function (AUSF) handles the authentication.
Policy Control Function (PCF) handles policy and charging rules.
Unified Data Management Function (UDMF) integrates subscriber information for both fixed and mobile access in the NG core.
Network Slice Selection Function (NSSF) supports the selection of a Network Slice instance.
Network Repository Function (NRF) provides NF service registration and discovery.
Network Exposure Function (NEF) handles the exposure of capabilities and events.
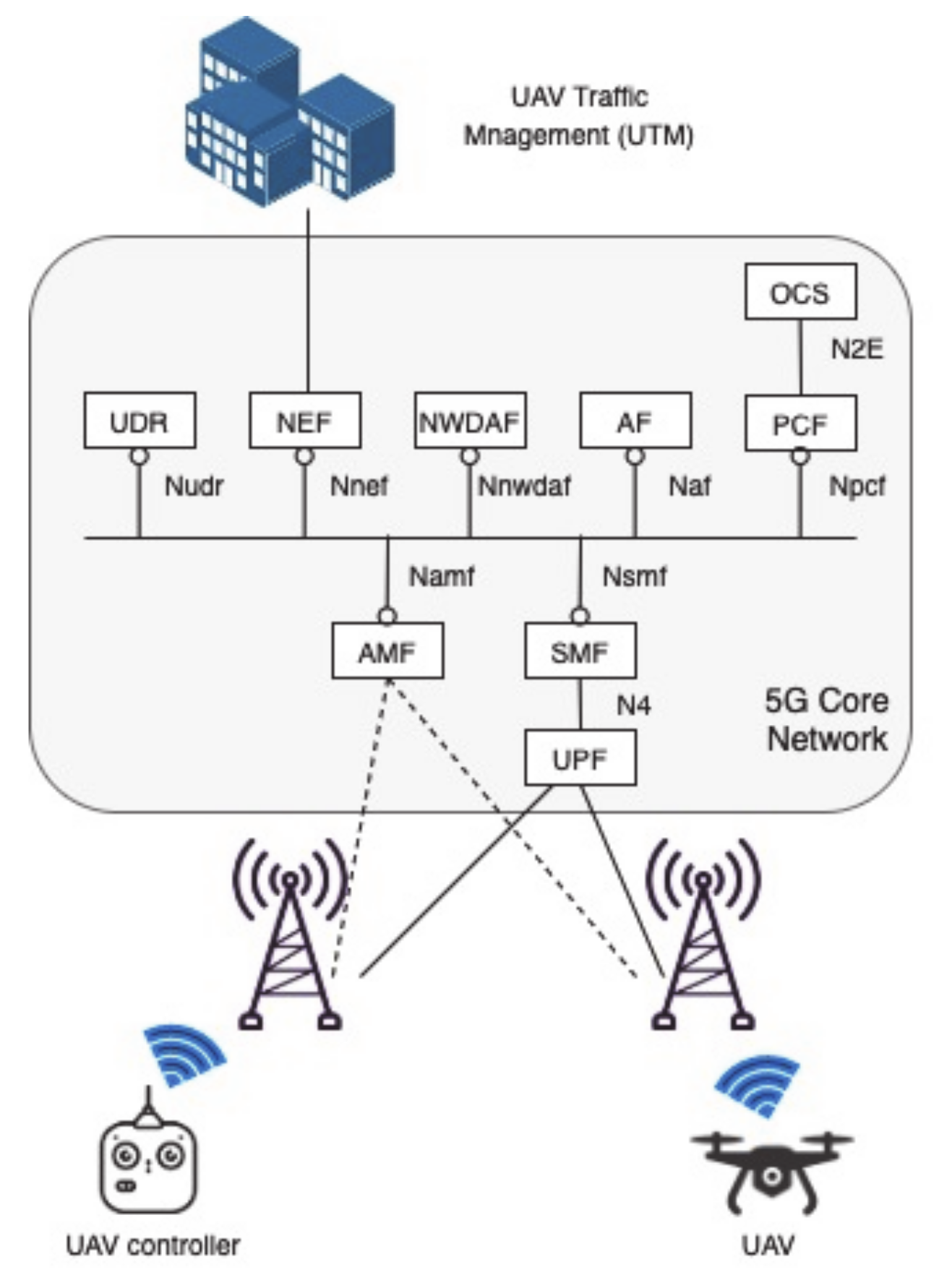
3GPP has implemented a reference model for UAS in 3GPP TR 22.825 based on 5G Core SBA, as shown in
Figure 2, where a UAV (treated as an end-user device) can be controlled remotely either directly or through the network, i.e., allowing Beyond Visual Line-of-Sight (BVLOS) control by a UAV controller [
23]. In terms of coverage, authorization, monitoring and Quality of Service (QoS) support, UAVs can then leverage the benefits of the 3GPP scheme. In addition, the 3GPP framework allows UAS Traffic Management (UTM) to communicate with the UAS and allows approved tenants to query UAV identity and UAS meta-data, e.g., public safety agencies [
24].
The Service-Based Architecture (SBA) is expected to further boost support for UAV facilities, including UAV navigation and air traffic control, weather forecasting and UAV connectivity management.
3. 5G Experimental Infrastructure
Considering the variety of advances that 5G offers to the UAVs, this paper focuses on the provision of 5G MEC capabilities, allowing a UAV to offload the softwarised UAV flight plan and controller at the edge of the network, providing on the one hand energy efficiency to the UAV mission and supporting on the other hand sophisticated and resource-demanding autonomous flight plans (e.g., AI-Driven) for BVLOS missions. This section provides details on the 5G infrastructure, as shown in
Figure 3, that used for the needs of this paper in order to realise the deployment of the softwarised flight controller at the edge of a 5G network and further validate the feasibility of delivering the C2 connectivity a UAV over 5G.
The 5G infrastructure used for the experimental part of this paper belongs to the 5GENESIS experimentation facility in Athens [
25,
26], which provides all the necessary tools for automated experimentation and assessing the 5G Key Performance Indicators (KPIs).
3.1. Mobile Core Network Infrastructure
The 5G experimentation facility that was used for the needs of the paper is equipped with the Amarisoft Core Network. For 5G SA mode, the Core supports 5G NR Release 15. Connectivity with gNBs is implemented through the standard NG interface using NGAP and GTP-U protocols. The 5GC includes built-in AMF, AUSF, SMF, UPF modules handling UE procedures and providing direct access to the IP network.
The core implements the MME portion with integrated SGW, PGW and HSS for 5G NSA mode and supports multiple eNBs with a standard S1 interface (S1AP and GTP-U protocols). It also supports the handling of UE procedures such as attach, authentication, security setup, detach, update of tracking field, service access, establishment of radio bearer, paging. For identity authentication, UEs can use USIM cards with XOR, Milenage and TUAK algorithms.
3.2. 5G RAN Infrastructure
The NR operates PCIe SDR boards provided by Amarisoft as RF front end. The eNB/gNB can run several cells, which can be configured individually and share the same S1 interface with the Core Network. The acquired system includes 3 PCIe SDR cards, providing the option to run simultaneously up to three LTE 2 × 2 cells or two cells of which the first uses LTE and the second 5G technology.
Amarisoft Radio Solution is an entirely software-implemented LTE/NR base station (eNodeB/gNodeB) operating on an ×86 Linux-based host. The host produces a base-band signal that is transmitted from the digital to analog conversion to a radio front end. For the reception, the reverse is done. The RAN connects via the standard S1 interface to the LTE Core Network and via the standard NG interface to the 5GS Core Network.
Moreover, the NR is release 15 compliant and it provides support both for FDD and TDD transmission. Bandwidth configuration varies between 5 to 50 MHz with MIMO options for up to 4 × 46. Supported modulation schemes range up to 256 QAM for Downlink transmission channel and 64 QAM for Uplink. Data subcarrier spacing can be modified between 15 kHz to 120 kHz.
Finally, an eight port Small Cell antenna was used with four wide band ports covering 1695–2690 MHz and four wide band ports covering 3400–3800 MHz. The small cell antenna provides two independent sets of 4 × 4 Multiple-input-Multiple-output (MIMO) functionality across the 1695–2690 MHz and 3400–3800 MHz ports, where the 4× High Band Ports for 3400–3800 MHz are provided in
Table 1.
3.3. User Equipment
For the needs of this paper, commercial 5G UEs/Mobile phones were used as 5G modems with USB tethering, which support 5G band 41 (2500), 78 (3500) and NSA.
4. Field Trial of 5G-Enabled UAV Prototype
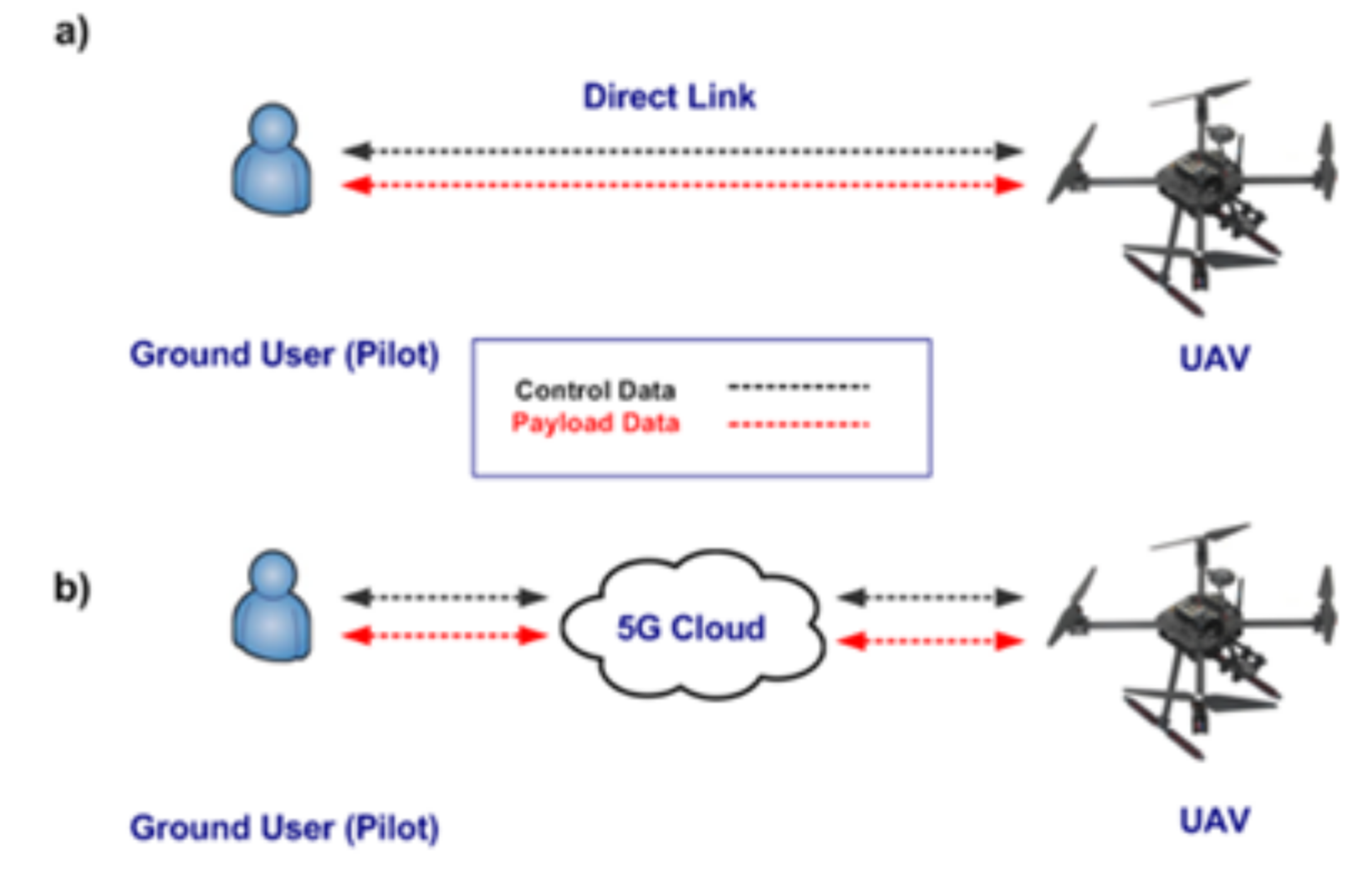
The conventional communication between the ground pilot and the UAV is realised with a direct link from the user to the aircraft as depicted in
Figure 4a. The pilot controls the UAV either moving the sticks of a remote controller or sending commands through a specified software (e.g., Mission Planner, Qgroundcontrol etc.).
In both cases the channel performance is limited for serving demanding applications like UHD video streaming, aerial data relaying, long-distance real-time flight etc. Moreover, computational demanding applications are hosted onboard, resulting in intensive energy consumption that minimizes the flight time and the operational capacity of the UAV for long-distant missions or for sophisticated (e.g., AI-driven) image/video analytics.
Towards unfolding the opportunities that the integration of 5G with the UAVs envisages, in this paper, we present a 5G-enabled UAV prototype, which realises: (i) a 5G communication link between the pilot and the UAV for both the control and the payload data, and (ii) offloads the softwarised flight controller at the edge of the 5G network, as shown in
Figure 4b. The pilot/user and the UAV, both connected to the 5G system, exploit the 5G channel high-capacity capabilities and the low latency characteristics of the edge computing. Therefore, this setup and the proof-of-concept 5G-enabled UAV is capable of supporting a wide range of new services and applications, while at the same time functionalities of the flight controller are deployed at the edge of the 5G network, alleviating the UAV from energy consumption and computational demanding tasks.
4.1. UAS Elements of 5G-Enabled UAV Prototype
The elements of the UAS consist of the Ground Control Station (GCS), the aircraft and the onboard devices for the flight and 5G communication. The majority of the software components used to build the 5G-enabled UAV prototype are open source and therefore further customizations are feasible.
4.1.1. Ground Control Station Deployed at the Edge of 5G
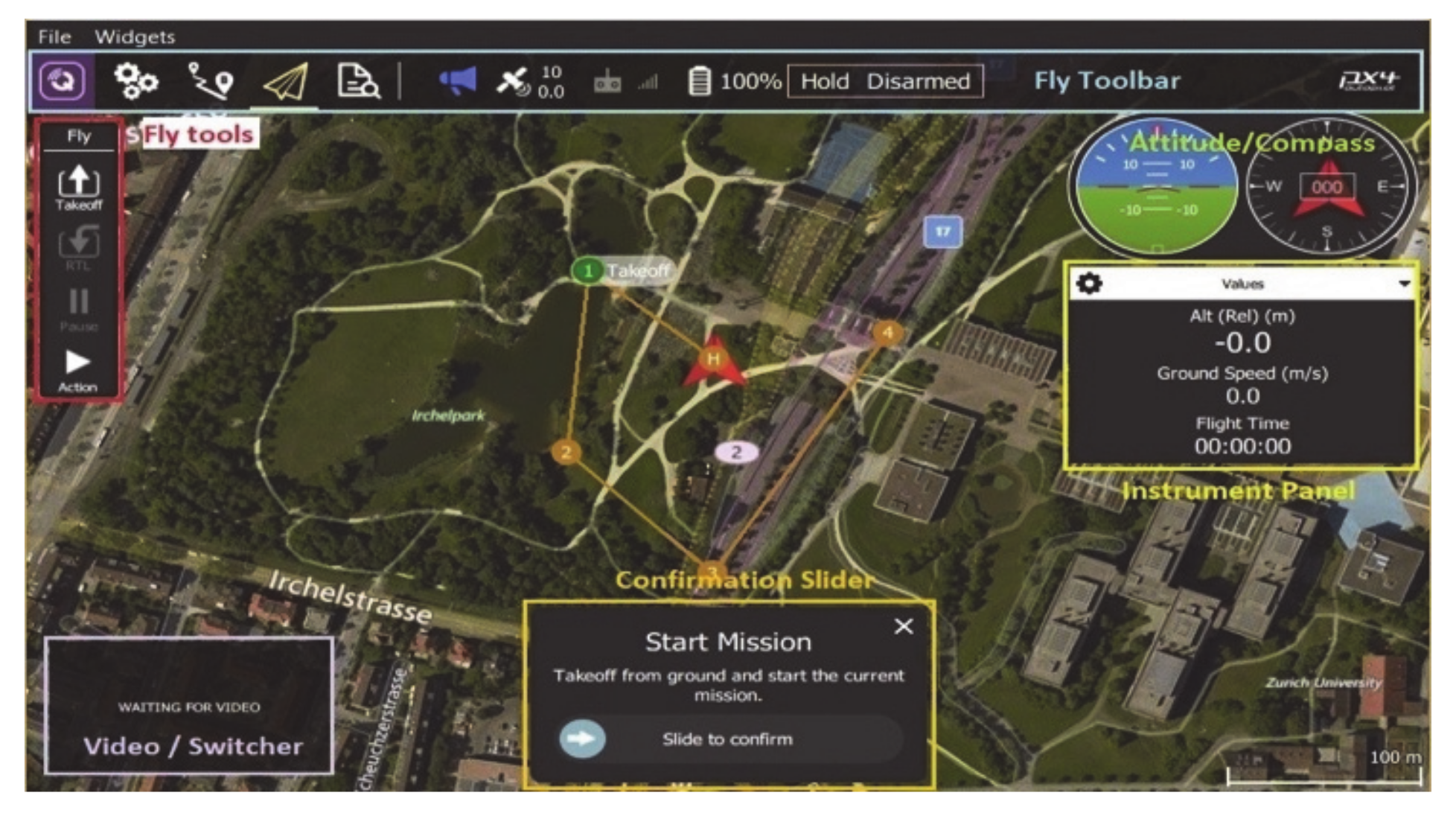
The amount and the complexity of the UAV missions require the remote pilot to use not only a joystick for the real-time navigation, but to utilize a GCS for accessing, analysing and editing all the required data, applying sophisticated piloting mechanisms, based on AI mechanisms and Decision Support Systems (DSS). The GCS of the 5G-enabled UAV prototype consists of a USB joystick/gamepad for the real-time manual UAV control and a Graphical User Interface (GUI) software, running at the edge computing node of the 5G network, for supporting more complex applications and autonomous flying. “QGroundControl” is the open-source GCS software [
27] that is used for the needs of the 5G-enabled UAV prototype, which supports sending joystick/manually-generated piloting commands to the UAV, but also automated generated from a respective autonomous flying application. Additionally, further configurations are supported, such as adjusting the parameters of the UAV flight controller, tracking the UAV position on a map, viewing telemetry data (e.g., battery level, temperature, speed etc.), sending special navigation commands (e.g., loiter, mission etc.) and accessing the flight log as is illustrated in
Figure 5.
The software has also the capability of embedding the UAV video stream, allowing the user to view all the data (i.e., telemetry and video) in one screen. Alternatively, the video stream can open to a new window or even to a new device (e.g., another laptop connected to the 5G network), so other people can watch.
4.1.2. UAV Frame of 5G-Enabled UAV
The UAV frame needs to be rigid to hold all the required equipment for the system realisation and at the same light enough with good flight characteristics. Thus, a full carbon fibre quadcopter has been chosen (see
Figure 6) with a frame diameter of 500 mm (motor to motor). It utilizes four brushless motors, strong enough for lifting an extra payload of 1 kg (with a 3S1P Lipo battery), allowing it to lift all the necessary equipment for the 5G communication. The quadcopter carries two kinds of equipment. The necessary devices for secure and stable flight, even autonomous and the equipment for the 5G communication link.
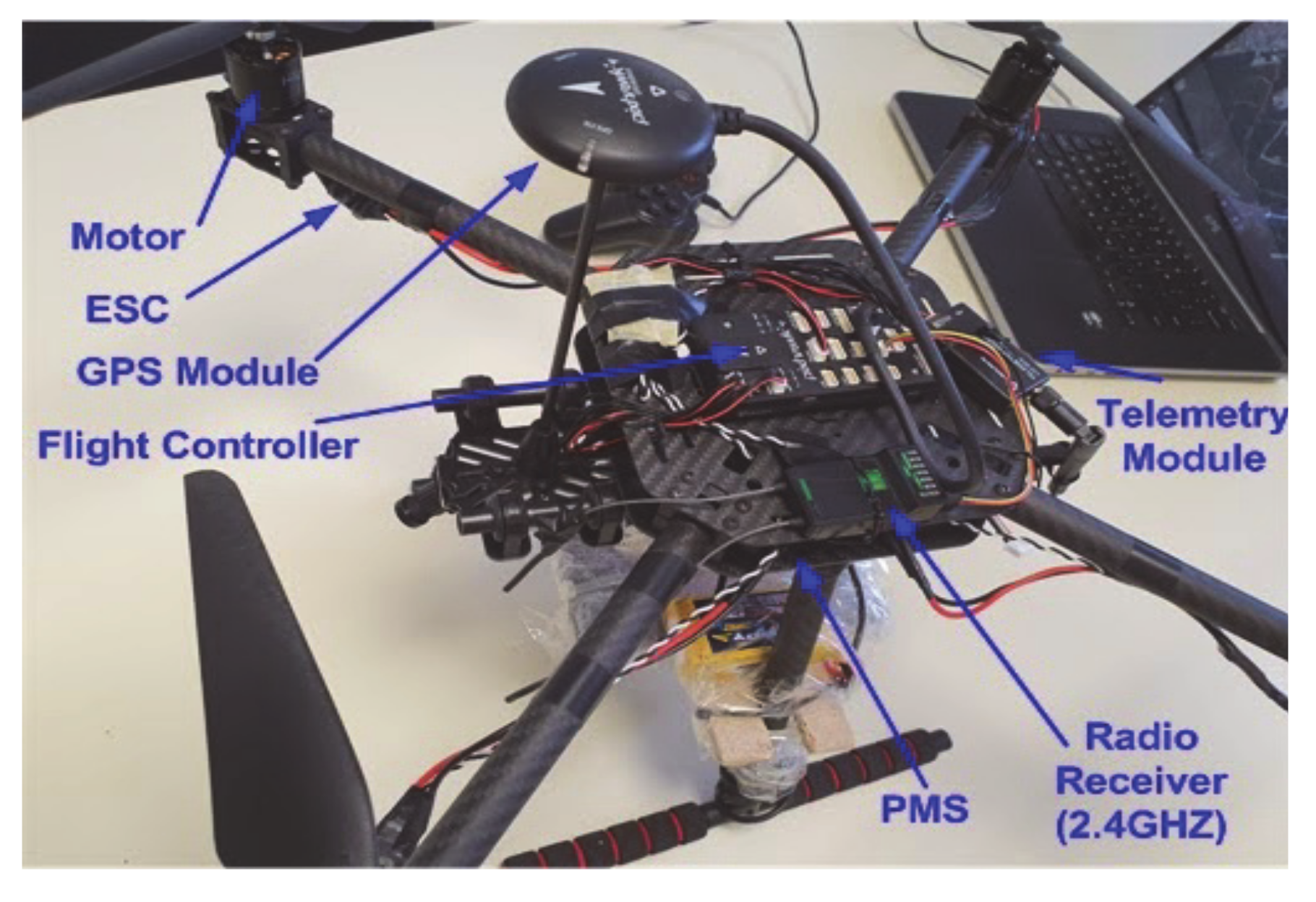
4.1.3. Onboard Standard Flight Equipment
The quadcopter uses the following devices for a standard flight, as
Figure 7 depicts.
Flight Controller/autopilot: This is the main board and the “brain” of the UAV. The autopilot is a Pixhawk 4 [
28], a sophisticated microprocessor platform that combines all the incoming data (from onboard sensors, user’s commands etc.) and sends the appropriate electric signals to the motors for a stable and secure flight. The Inertial Measurement Device (IMU) consists of an accelerometer, a magnetometer and a gyroscope for knowledge of motion and location and autonomous flight capabilities (e.g., autonomous return to base, autonomous navigation to waypoints, autonomous landing etc.). The flight controller runs the open-source Dronecode flight stack (PX4) [
29] and communicates with the Ground Control Station (GCS) (i.e., QGroundControl) sending MAVLink protocol messages [
30].
Global Positioning System (GPS) & compass module: This module combines a GPS antenna and a compass. It is placed away from the UAV electronics for avoiding interference and provides the autopilot with all the necessary positioning data for autonomous navigation.
Telemetry Module: The UAV and the GCS at the edge utilize a dedicated telemetry link in 433 MHz (for Europe) for transmitting flight and real time system configuration data. The first of the two paired modules are serial connected to the flight controller, while the second one is USB connected to the computing node of the 5G Edge running the GCS software.
Radio Control Receiver: The remote pilot has the option to control the quadcopter using a special remote-control transmitter (Tx) sending PPM signals in 2.4 GHz, which is used for security reasons in case that the autopilot or the 5G C2 link fails. The flight controller receives the signals using a radio receiver module (Rx), which is connected to one of its ports.
Power Management System (PMS): This electric circuit is responsible for managing the electric power coming from the UAV main battery, regulating and distributing it to all the onboard devices (e.g., motors, flight controller etc.).
Motors: The UAV utilizes four brushless motors, with a combined lifting power of approximate 4 Kgr (using a 4S1P Lipo battery).
Electronic Speed Controls (ESC): The UAV utilizes four 30A BLHeli _S ESC (one for each motor) for regulating the motor spin. The ESCs are connected both to the PMS (for electric power supply) and to the flight controller (for control signalling).
Main UAV Battery: The main power element of the UAV is a 3S1P LiPo, 11.1 V, 5100 mAh and 25C discharge rate battery.
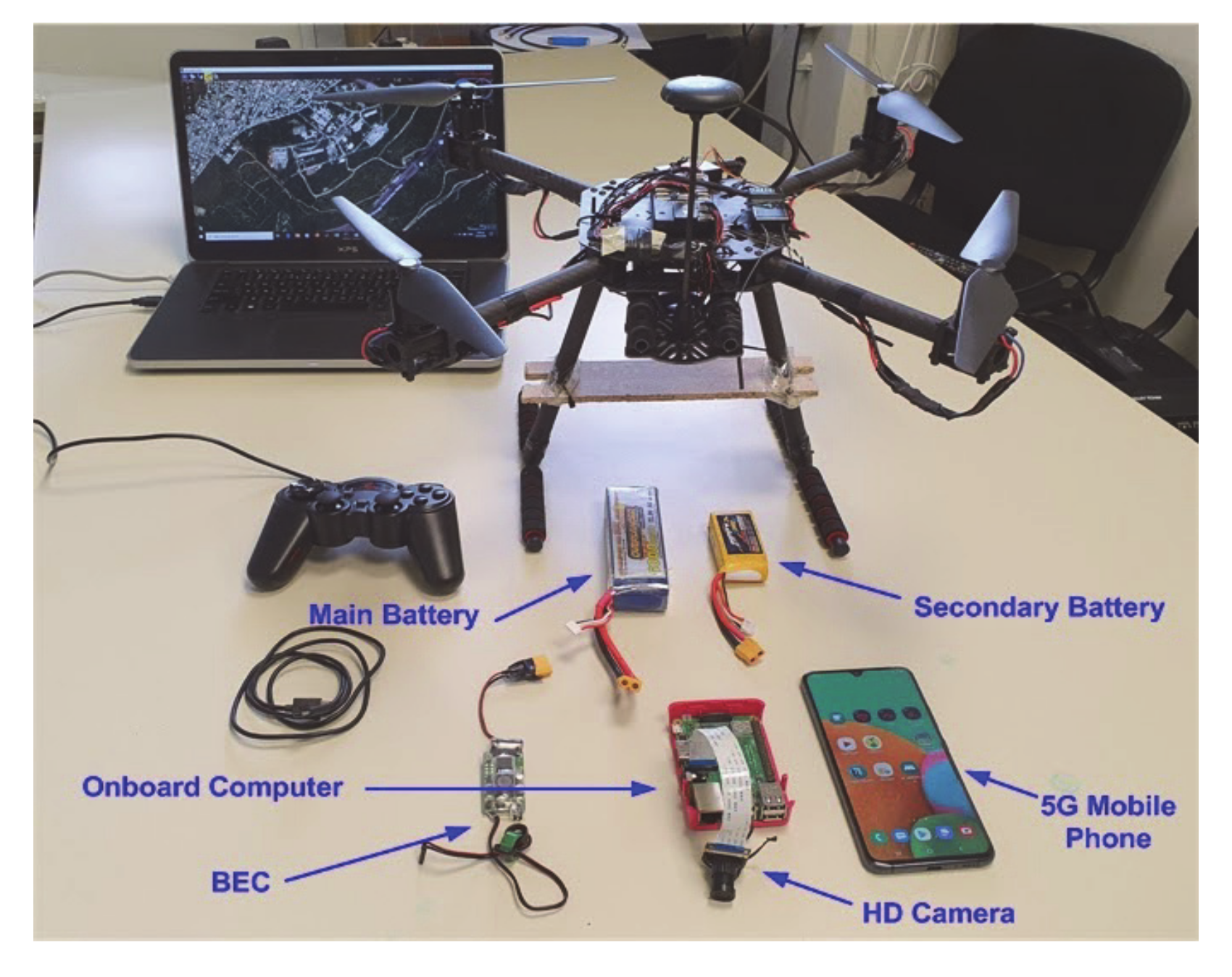
4.1.4. 5G Communication Onboard Equipment
The standard communication between the UAV and the GCS is realised using the 433 MHz telemetry and the 2.4 GHz control links. In order for a 5G communication link to be established, extra equipment is implemented (see
Figure 8), namely:
5G Mobile Handset: This is the 5G gateway of the UAV. The flight controller receives the data from the 5G network through the 5G capable mobile phone.
Onboard Computer: Since the 5G mobile handset cannot be connected directly to the UAV flight controller, a mini-computer is used in between for interfacing purposes. In order for the mini-computer to fit on the quadcopter, it should be lightweight, with small dimensions and low power consumption. The Raspberry Pi3 Model B+ [
31] meets these basic criteria (4 USB ports, max 2.5 A current draw, no more than 45 g in weight and 85 mm × 56 mm × 17 mm in size). The onboard computer runs a specialized software, MavProxy [
32], configured to forward the MAVLink messages of the GCS to the Pixhawk flight controller and vice versa. In addition, it forwards the video stream to the specified ground device (e.g., 5G edge computing node).
HD Camera: An HD (1080 p) 8 MP camera is fitted in the front side of the quadcopter and it is connected directly to the Camera Serial Interface (CSI) of the Raspberry Pi3 using a ribbon cable.
Secondary UAV Battery: For safety and redundancy reasons the 5G related equipment is powered not from the main UAV battery, but from an extra LiPo 3S1P 1500 mAh battery, capable of providing at least 3A of current for enough time period.
Battery Elimination Circuit (BEC): This circuit regulates the voltage from the secondary UAV battery (11.1 V) and powers up the Raspberry Pi3, providing the required stable voltage of the required 5 V to the Raspberry input.
4.2. 5G-Enabled UAS Realisation
The realisation of the 5G-enabled UAS is presented in
Figure 9. The remote pilot sends the control commands moving the sticks of the joystick/gamepad, which is connected via a USB cable to the computing node of the 5G edge infrastructure, hosting the GCS software. The user can also control and configure the UAV parameters from the GCS software and receive the telemetry data, which can be further exploited by sophisticated AI algorithms for advancing the energy efficiency of the flight, considering external parameters, such as the wind and the weather, which can be fed to the system via open data records. These energy-efficient enhancements can significantly improve the mission capabilities of the 5G-enabled UAV.
On the quadcopter side, the onboard mini-computer (i.e., Raspberry Pi3) gains access connectivity to the 5G network by exploiting a USB tethered connection with the 5G UE/mobile phone (acting as a 5G modem).
The onboard computer is also connected to the Pixhawk flight controller via a USB cable in order to forward the telemetry and control data from the GCS to the flight controller and vice versa. The camera is directly connected to the Raspberry and the video stream is also transmitted through the 5G network. It is noted that when the 5G communication link is active, the standard dedicated control and telemetry links (at 2.4 GHz and 433 MHZ respectively) are deactivated. Thus, all of the control commands, the telemetry data and the video stream are transmitted exclusively over the 5G network.
5. Field Trials and Results
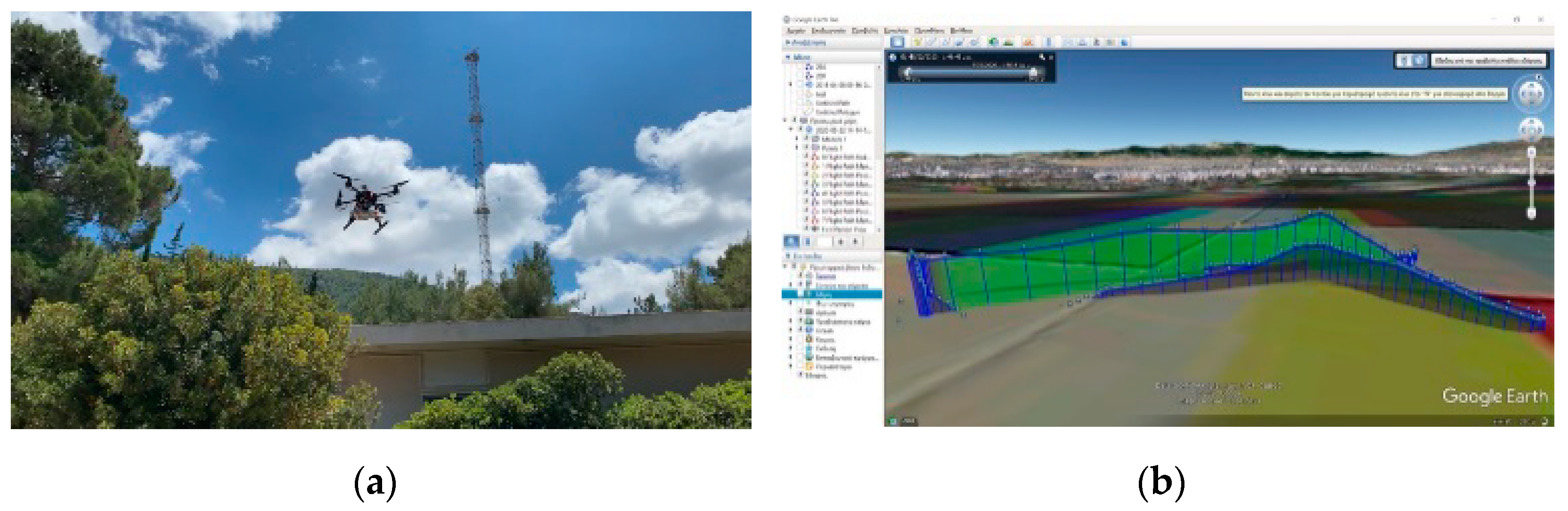
A field trial feasibility flight of the 5G-enabled 5G UAV with GCS deployed at the edge of the network was performed in order to validate of controlling efficiently a UAV over 5G, as a proof-of-concept trial that is the basis for all the other enhancements, including energy efficiency, that the UAS receives from the 5G integration.
The trial flight was performed using the Non-Public 5G Network (NPN-5G) described in
Section 4 of this paper which offered a sufficient coverage for realising the trial flight as shown in
Figure 10.
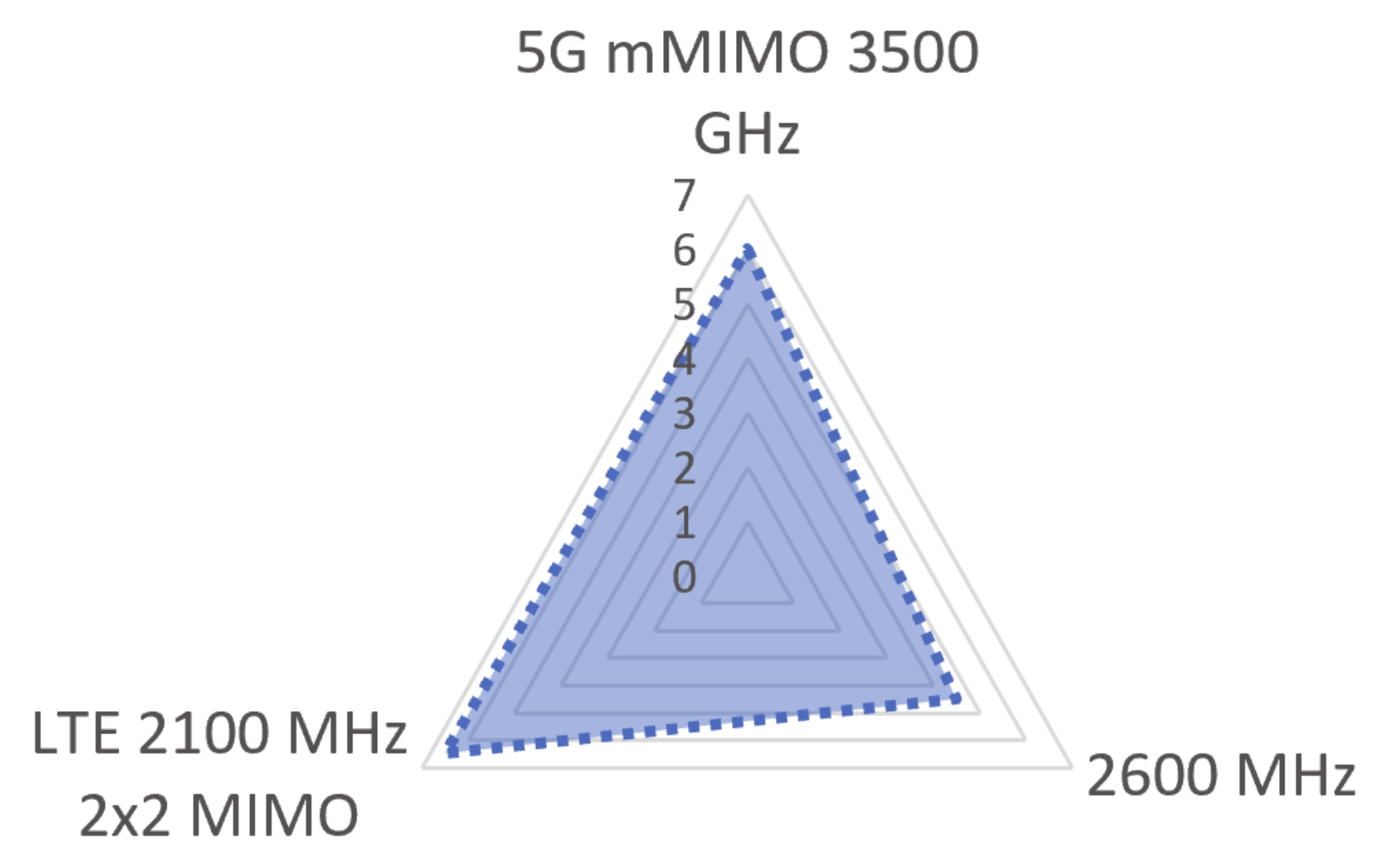
Concerning coverage, 5G and cellular connectivity in general, due to the hand-over capability from one cell to the next, can support safe Beyond Visual Line of Sight (BVLOS) operation and advanced UAV missions, such as cross-border drone flights. The early stages of commercial 5G deployment at sub-6 GHz frequency band, is fulfilling the needs of up to a few Gbps of wide area coverage and data speeds. By using beamforming antennas and lower frequency bands for the uplink, coverage in and around the 3.5 GHz band can be further improved.
Compared to an LTE 2100 MHz 2 × 2 MIMO uplink,
Figure 11 shows the relative outdoor coverage for 2.6 GHz and 3.5 GHz (mMIMO), considering the propagation model of Okumura-Hata. The estimate assumes, a downlink that is 8 dB stronger than the uplink, and a huge gain of 6 dB of MIMO (mMIMO) compared to 2 × 2 MIMO. This calculation shows that 5G at 3500 MHz downlink with massive MIMO will surpass the 2600 MHz and will be similar to LTE 1800 2 × 2 MIMO coverage.
After the system initialization, the GCS deployed at the edge of the 5G network and the UAV pilot established communication successfully with the on-board Pixhawk flight controller module over the NPN-5G network. Although, the environmental conditions were not ideal, as sudden wind bursts randomly occurred during the test flight, however, the pilot managed to successfully take off the aircraft, hover it at about 3 m of altitude, make some manoeuvres and land it successfully, making a semi-autonomous flight of approximately 5 min as it is shown in the recorded flight trajectory in
Figure 12.
Table 2 summarizes the statistics that were collected during the flight. As it can be observed the pitch of the antenna affects the reception quality, resulting to a loss rate of 6%, which is low enough and did not affect the flight over 5G, showing that 5G at 3.5 GHz can be used for delivering efficiently the C2.
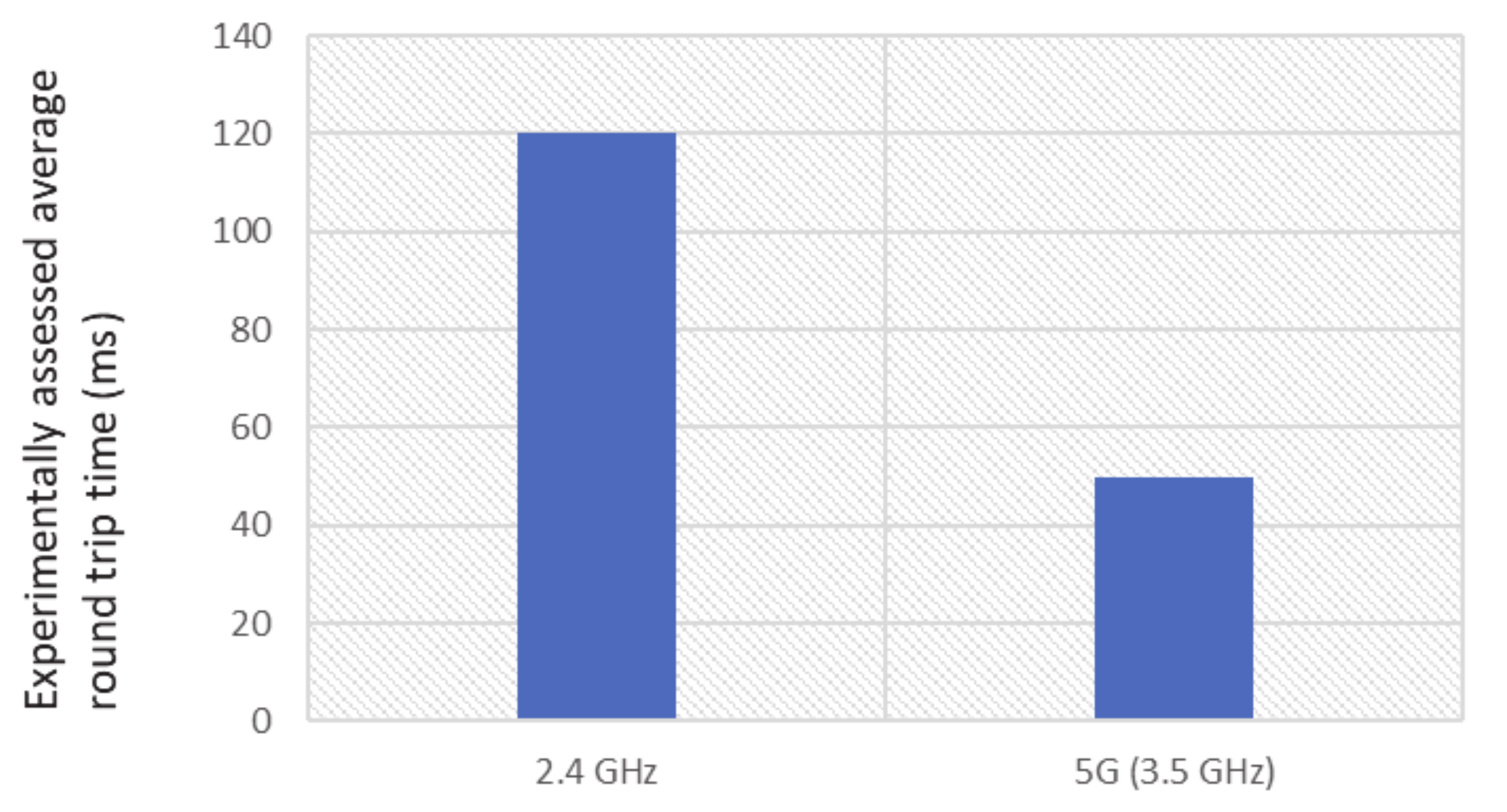
In terms of latency, as
Figure 13 depicts, the average round trip time for the C2 equipment over 2.4 GHz is experimentally assessed at 120 ms, while for the 5G mMIMO at 3.5 GHz is experimentally assessed at approx. 50 ms (these values include the latency introduced by the C2 systems).
Finally, in terms of energy consumption, the 5G equipment that needed the UAV to lift weighted approx. 200 g, which is not a significant load for heavy UAVs capable of lifting communication equipment, such as gNodeBs. More specifically, the heavy UAVs can lift approx. 15 kg, which means that the 5G equipment of the prototype is only 13% of the max payload that the UAV is capable of lifting. Although the extra weight affects the flight time and the battery duration, however the impact is negligent for heavy UAVs, since this small influence can be balanced by proper configuration of the UAV, such as longer propellers. Therefore, this lightweight 5G equipment does not affect the energy efficiency that the 5G system can offer to heavy UAVs for executing advanced flight plans.
6. Discussion
The 5G-enabled UAV prototype that was presented in this paper has proved the feasibility of softwarising and offloading the flight-controller at the edge of the network and delivering the command and control over 5G. Such an approach can significantly alleviate the UAV from resource demanding tasks, achieving therefore energy efficiency on the one hand, and on the other hand computationally demanding tasks can be performed at the edge, supporting autonomous BLOS UAV flights, depending on the analysis of data received from sensors installed on the drone.
Such an improvement towards the next generation of 5G-enabled drones with high computational capabilities, but with optimised energy consumption due to the offloading of resource demanding tasks and optimised flight decisions can support the realisation of various use-cases, among which the creation of opportunistic networks at under-served areas.
Future research directions include the deployment at the edge of AI-driven applications for the realisation of different mobility use-cases, such as autonomous structural inspection of railways and roads, autonomous logistics supply provision and BIM-driven construction inspection.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}