5.1. Setup Cavitation (IGVF = 0)
At first, the results obtained with the setup 1 (cavitation, see
Table 2) are investigated. In
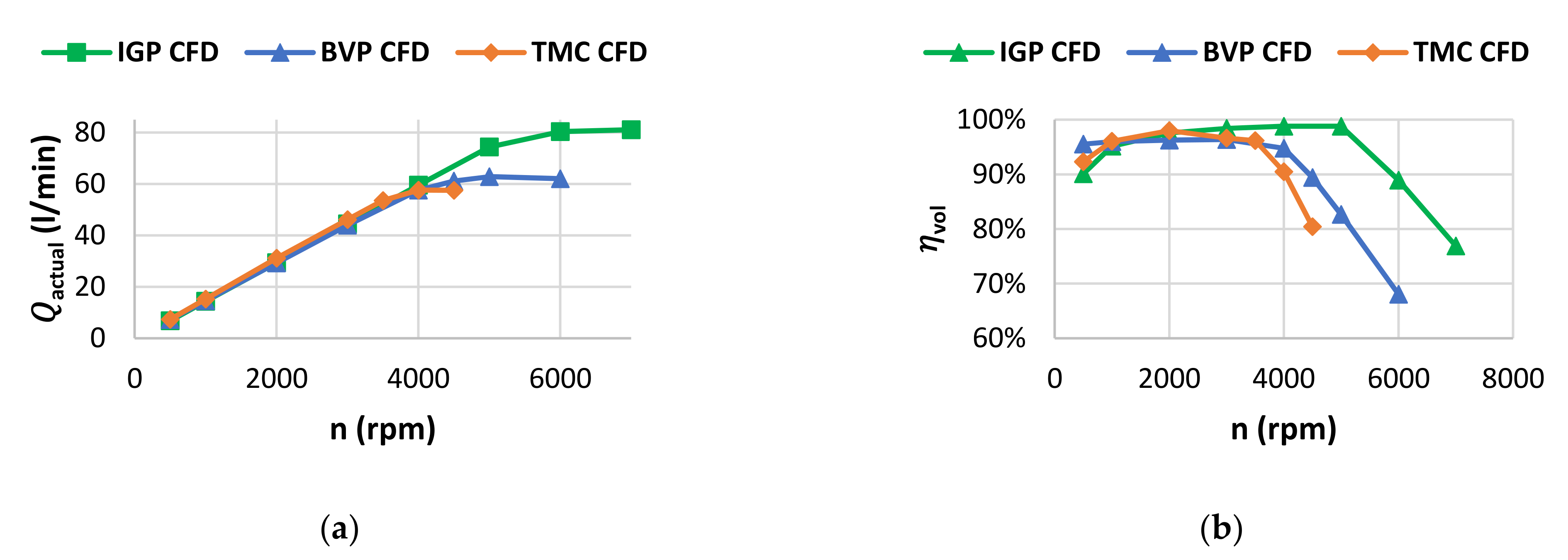
Figure 14, the conveying characteristics and the equivalent volumetric efficiencies of the three pumps are compared. The volumetric efficiencies are calculated as stated in Equation (1).
In
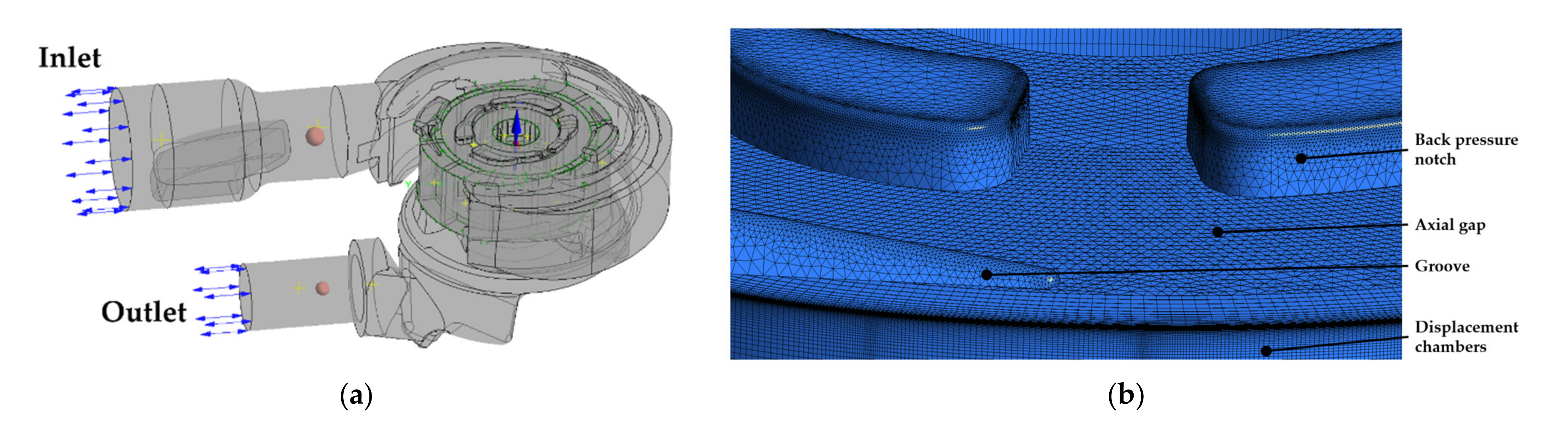
Figure 14a, it is visible that for the TMC pump, cavitation starts at about 3500 rpm. The maximum volumetric flow rate is restricted to a value of slightly below 60 L/min. At 4000 rpm, the BVP is the second pump to reach the cavitation onset, and at 5000 rpm, the IGP is the last one, reaching a volumetric flow rate of approximately 80 L/min. This can be explained by the different suction port geometries and filling strategies of the displacement chambers in the pumps. In the TMC pump, the flow has to perform a 180° turn in the stator suction port area in order to reach the channels in the rotor where the oil is sucked into the displacement chambers (see
Figure 3). This leads to high velocities and a high pressure drop resulting in an early cavitation onset. This could be improved by designing a new suction port geometry with a radial inlet. The BVP has two suction ports where the fluid is fed into the displacement chambers, as it is of two-stroke type. Furthermore, the chambers are fed both axially and radially, which leads to higher flow cross section area, less pressure loss and, hence, a delayed cavitation onset. The IGP, however, has the highest flow cross section area in the suction port. Although it is of one-stroke type and only axially fed, the suction port is laid out with ample flow cross section area and small pressure losses. Therefore, the cavitation onset is further delayed to higher rotational speeds.
Additionally, it can be seen in
Figure 14a that the three pumps show a slightly different gradient
for rotational speeds before the cavitation onset. As
, the TMC pump has a slightly higher gradient and the BVP a slightly lower one with the gradient of the IGP staying between those two. This corresponds to the theoretical displacement volumes
of the pumps, which are listed in
Table 1.
The volumetric efficiencies of the three pumps are in a quite similar range between 1000 and 3500 rpm, which can be obtained from
Figure 14b. At lower rotational speeds the BVP seems to feature slightly higher volumetric efficiencies than the IGP and the TMC pump.
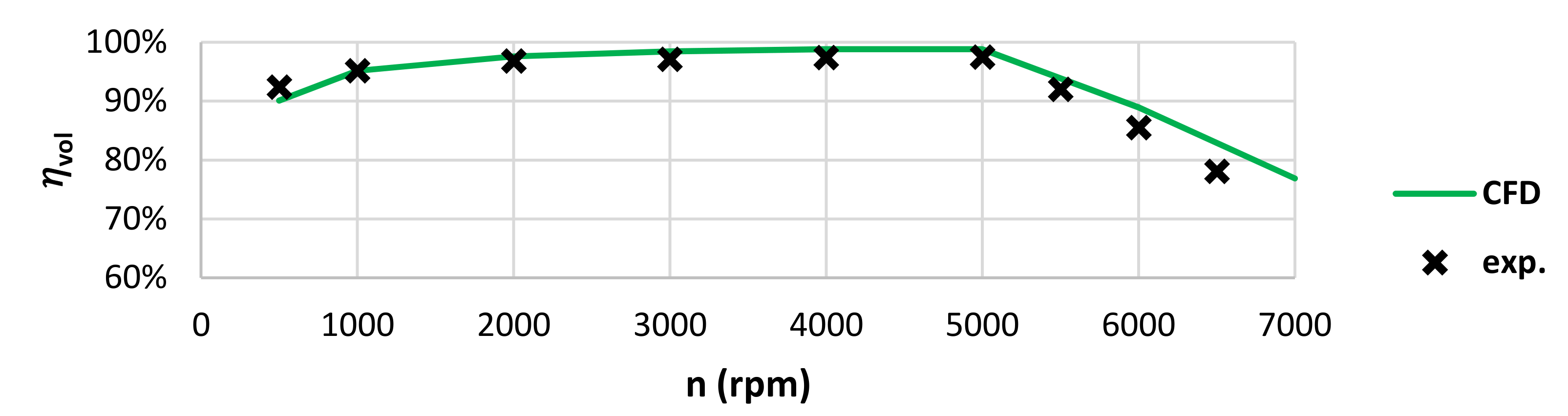
To validate the CFD model of the three investigated pumps, in
Figure 15,
Figure 16,
Figure 17, the volumetric efficiencies obtained from the CFD simulations are compared with the experimental data.
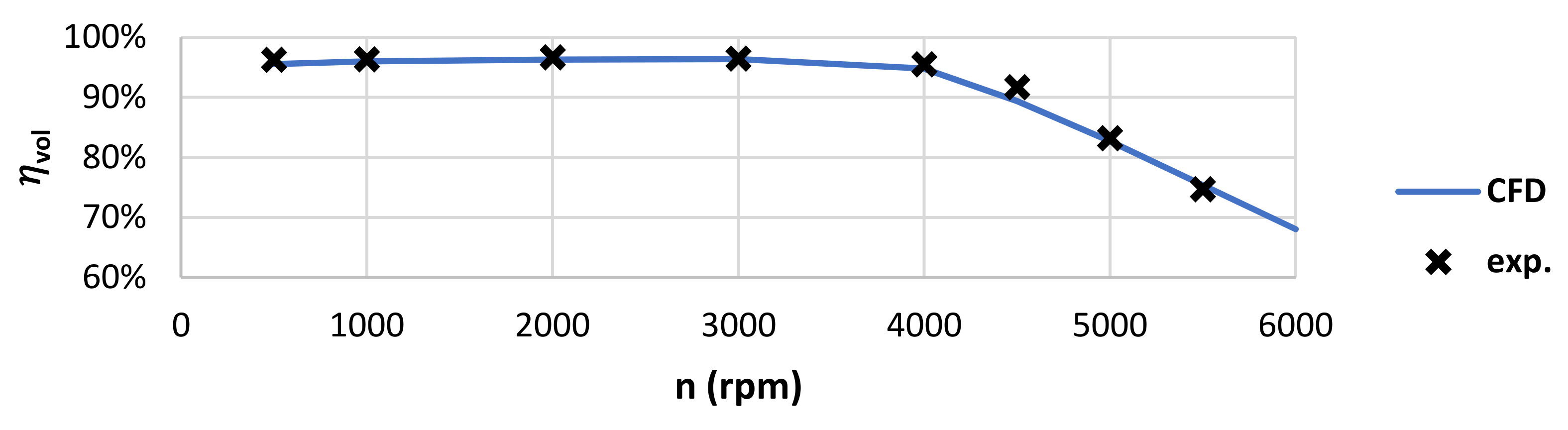
As it can be observed from
Figure 15 and
Figure 16, the CFD data show a good fit to the experimental data for the BVP and the IGP. By iteratively calibrating, the applied Rayleigh–Plesset cavitation model constants to
and
, the cavitation onset is also captured quite well. However, the drop of the volumetric efficiency due to the onset of cavitation with increasing rotational speed is underestimated for all three pump types. This is probably because of the limitations of the Rayleigh–Plesset cavitation model. It only incorporates vapor cavitation, while in reality, we can expect vapor cavitation as well as outgassing of dissolved air from the oil limiting the suction capability of the pumps. The usage of a more sophisticated cavitation model could be a way to enhance this prediction.
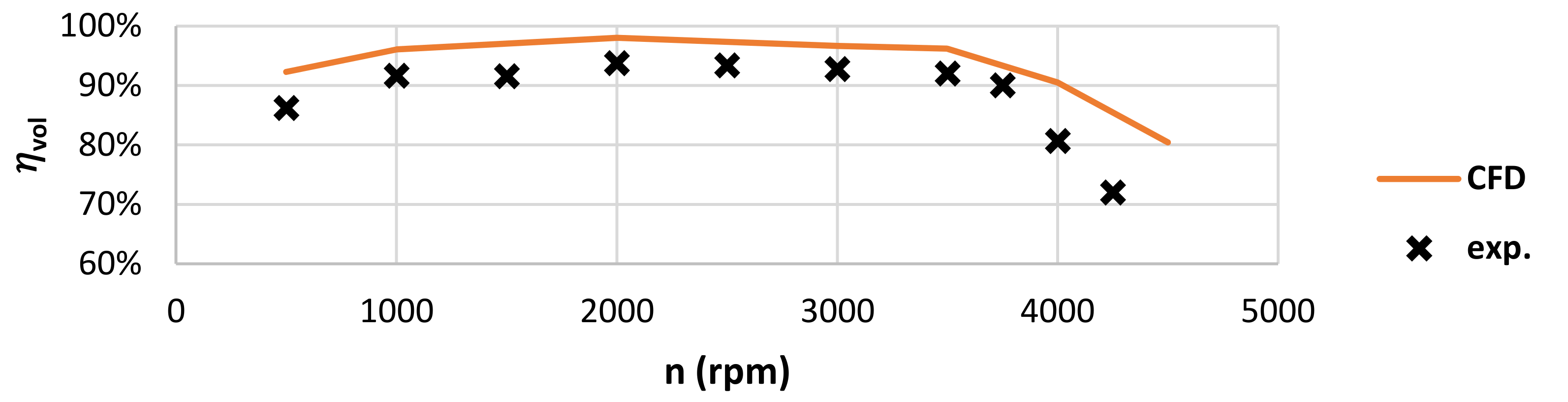
For the case of the TMC pump, it can be clearly seen in
Figure 17 that the CFD prediction for the volumetric efficiency does not fit as well to the experimental data, as it does for the BVP and the IGP. The volumetric efficiency is considerably overpredicted in the CFD simulations. As the volumetric efficiency is governed by the internal leakages, most possibly a difference between the clearance heights assumed in the CFD model and the real clearance heights are responsible for this deviation. Besides the deviation in absolute value of the volumetric efficiency, the qualitative characteristic while increasing the rotational speed is captured quite well. This indicates that the CFD model itself is valid, but the assumptions for the gap heights need to be improved. However, it is quite difficult to determine the actual gap heights during pump operation. Furthermore, the gap height is kept constant in the CFD simulation. In reality, the rotor–stator system with the spring can dynamically move axially depending on the pressure distributions and the spring stiffness. This effect, which then enlarges the gap heights significantly, is not incorporated in the CFD simulations and could be a further reason for the deviation, which especially becomes higher at rotational speeds above 3500 rpm, when cavitation starts. Additionally, the limits of the employed cavitation model contribute to the higher deviations here.
Considering the experimental data, the TMC pump shows lower volumetric efficiencies than the BVP and the IGP, which are both on a similar, higher level. Apparently, the gap heights in the TMC pump are larger than assumed. One possibility to improve this would be to use a spring with a higher stiffness (see
Figure 3). The force pushing the rotor against the stator would increase and the leakages would decrease. However, this would presumably also lead to an increased required driving torque and wear.
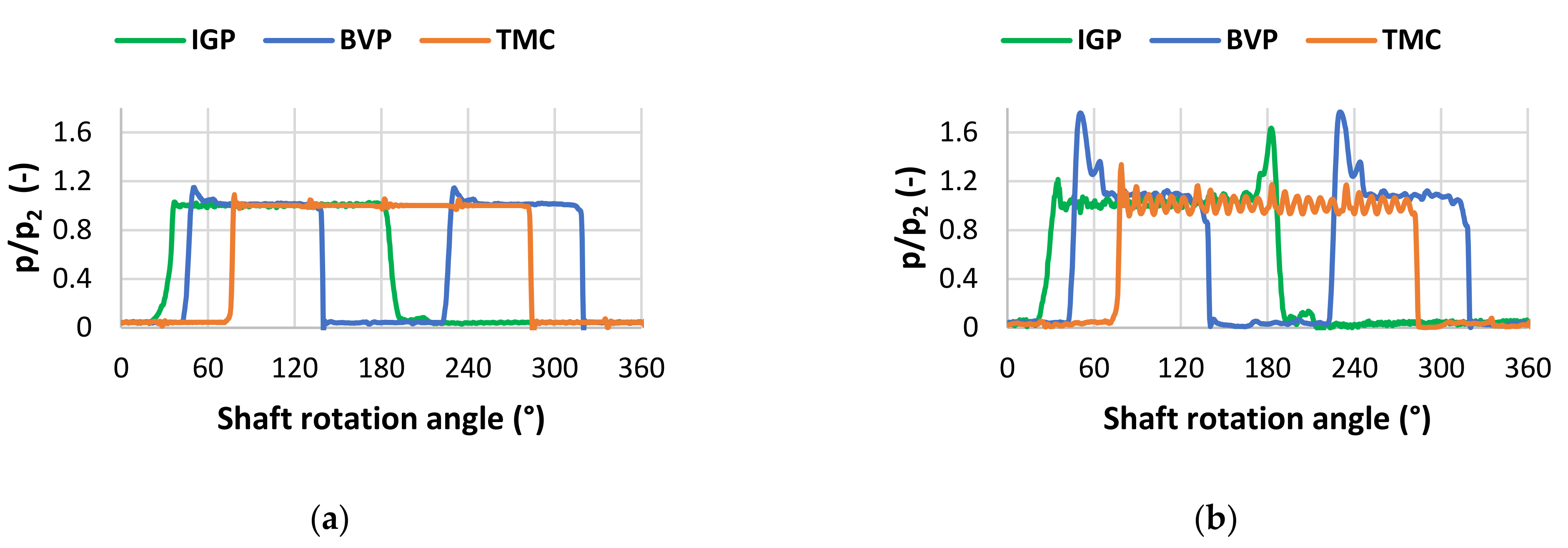
Besides the volumetric efficiency and the conveying characteristic, the instantaneous pressure profile inside a displacement chamber within one shaft rotation is quite distinctive for a pump’s operational characteristic. In
Figure 18, the pressure profiles gained by the CFD simulations for all three pumps are compared to each other at two different operating points. It has to be noted that for the BVP and the IGP, the shaft rotation angle equals the rotor rotation angle. For the TMC pump, because of the slanting plate, this is not the case. Within one shaft rotation of 360° the rotor undergoes a rotation of 51.42° around the tilted axis. However, to compare the pumps, in the following, all instantaneous displacement chamber profiles are plotted over the shaft rotation angle.
The first obvious difference between all three pumps is that the BVP undergoes two delivery pressure plateaus within one shaft revolution. Furthermore, it is obvious that the pressure surge, when the displacement chamber connects to the delivery port, has the highest values for the BVP. Increasing the rotational speed increases the pressure surge height further. For the IGP, a pressure surge occurring when the displacement chamber disconnects from the delivery port seems to be especially distinctive, while both other pumps do not really show a pressure surge at that point. This can be quite well observed in
Figure 18b and is due to the fact that the displacement chambers are still decreasing in volume when they disconnect from the pressure port. Furthermore, the pressure ripple while the displacement chamber is connected to the delivery port shows the highest amplitudes for the TMC pump in
Figure 18b.
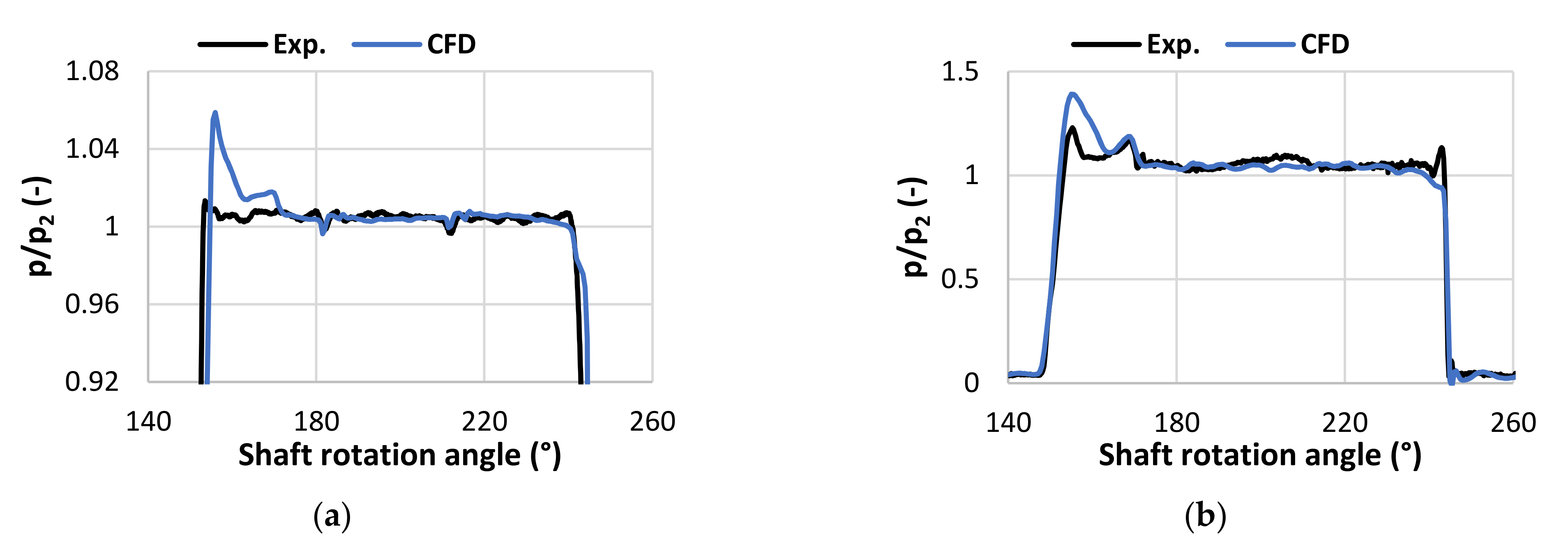
To validate the CFD model, test bench measurements are conducted with a pressure transducer placed in the rotor wall of the BVP, recording the instantaneous pressure profile (see
Section 4). In
Figure 19, both CFD and experimental data are compared at two different operating points.
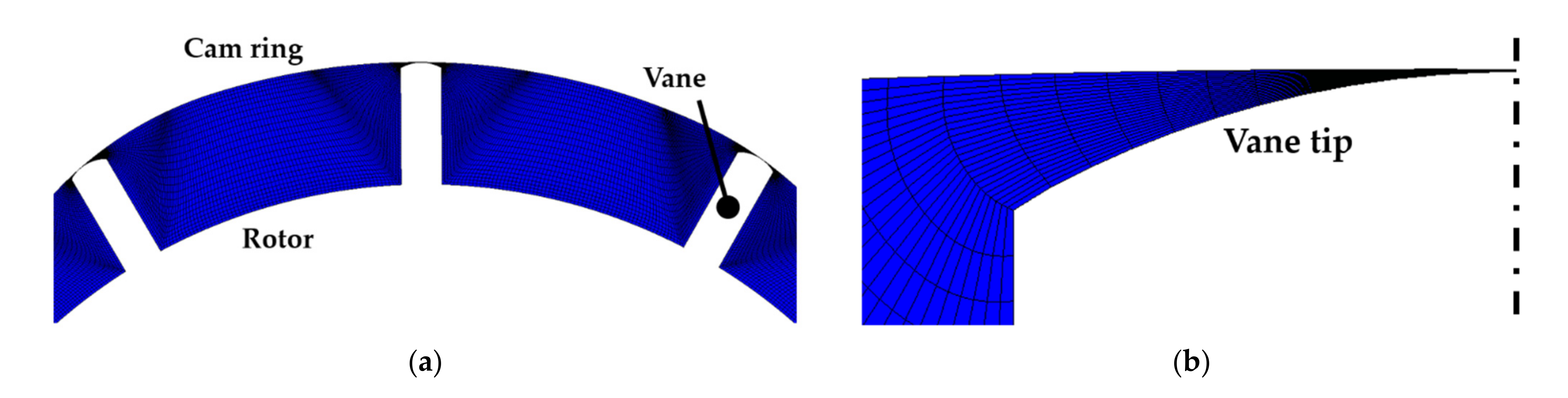
It is clearly visible that the CFD simulations overpredict the pressure surge appearing when the displacement chamber connects to the delivery port. This is, on the one hand, due to numerical reasons and a high sensitivity regarding the meshing of the radial gap area and has also been observed by the authors in [
27] for CFD simulations with the solver STAR-CCM+. On the other hand, in the CFD simulations, the radial gap height is kept constant. In reality, the vanes can radially recede when the force balance is disturbed, and therefore, the pressure surge may be damped, while the vanes slide a bit back into the rotor. Because of these reasons, it is quite challenging to accurately predict this pressure surge in the simulations. Apart from that pressure surge, the pressure profiles obtained numerically fit quite well to the experimental data. In
Figure 19a, it can be seen that especially the two minor pressure drops at 181 and 211° on the delivery port plateau are very well captured. Those pressure drops result from the two following displacement chambers connecting to the delivery port [
27]. The thereby occurring pressure surges are also visible in the observed displacement chamber, as the pressure waves travel through radial and axial gaps between displacement chambers.
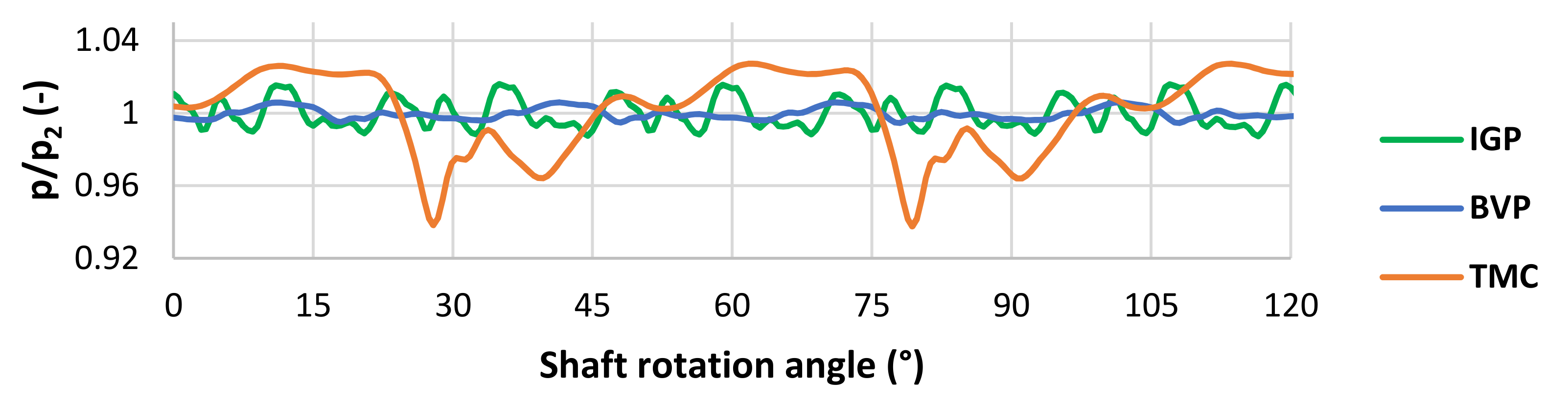
As the noise emission of pumps is an important aspect, in the following, the pressure ripple at the delivery port is analyzed, as it is described in
Section 3.4. In
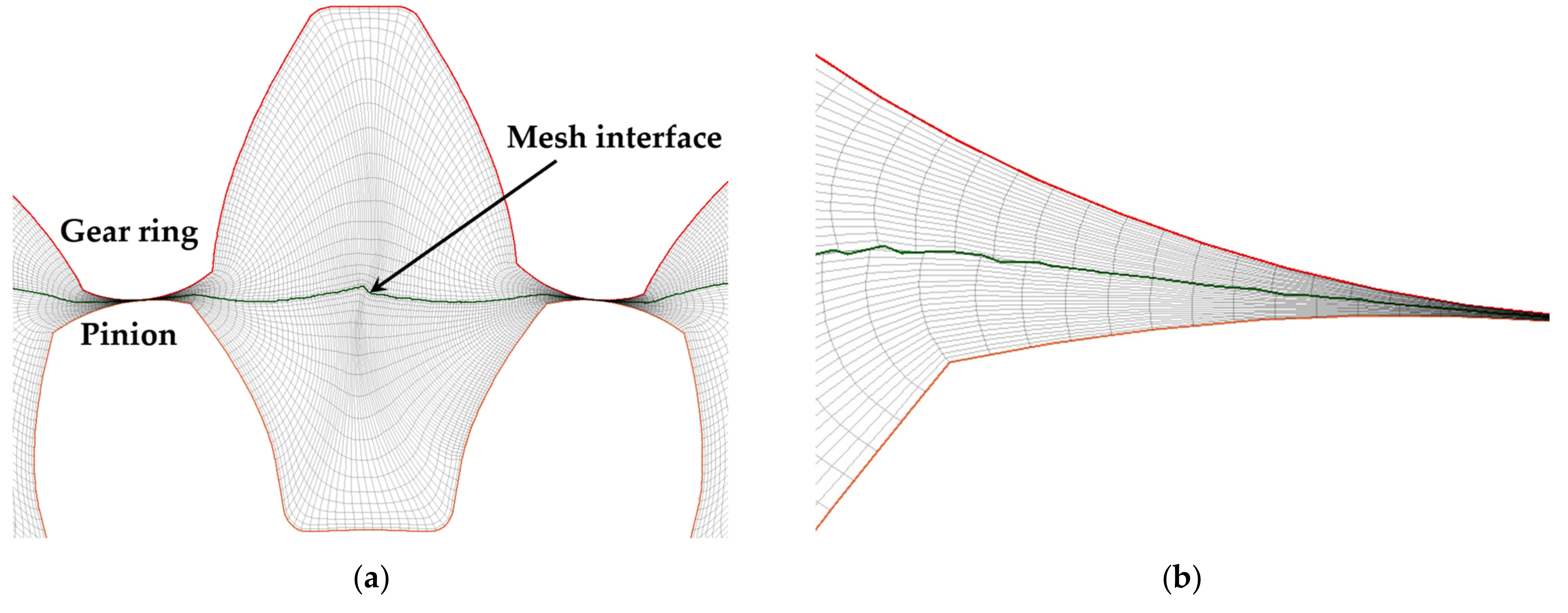
Figure 20, the 30° periodicity in the pressure signal of the BVP can be easily related to the 12 vanes. In the signal of the IGP, a 24° periodicity can be obtained, which here relates to the 15 teeth of the pinion. For the TMC pump, the seven gear teeth in the stator lead to a periodicity of 51.42° in the time signal of the pressure ripple.
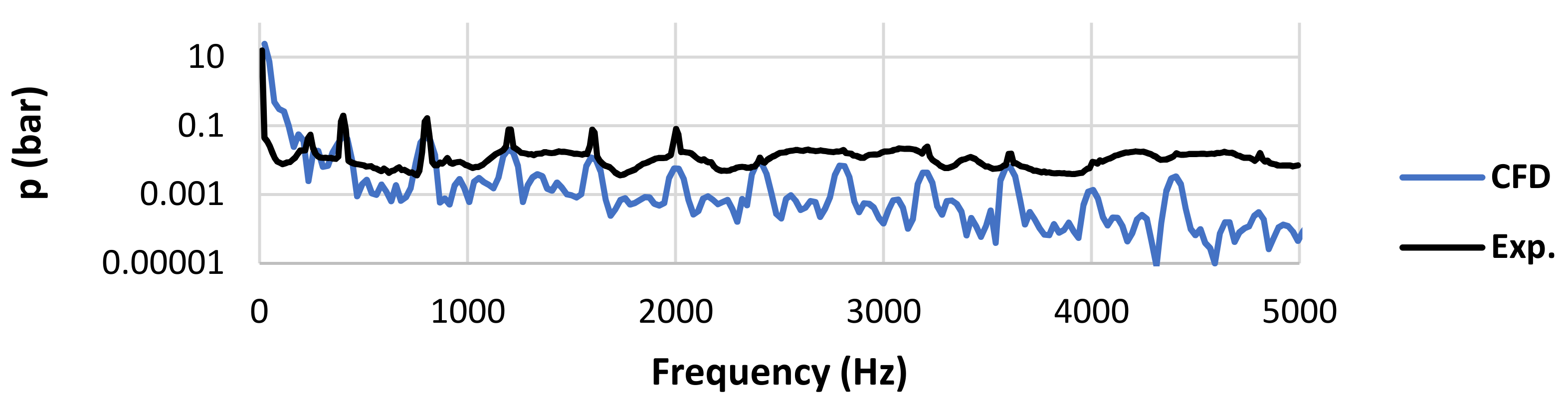
From the CFD simulations for this operating point follows the conclusion that the pressure ripple of the TMC pump seems to be significantly higher in amplitude compared to the BVP and the IGP. However, when comparing the pressure ripple obtained from the CFD simulations to the test bench measurement for the BVP in a FFT analysis frequency wise,
Figure 21 shows a deviation of both curves over the whole frequency range. Although the first few blade passing frequencies are correctly captured, the pressure ripple amplitudes are underpredicted by the CFD simulation. This shortcoming may be due to the negligence of the dynamic vane movement of the BVP in the simulation model.
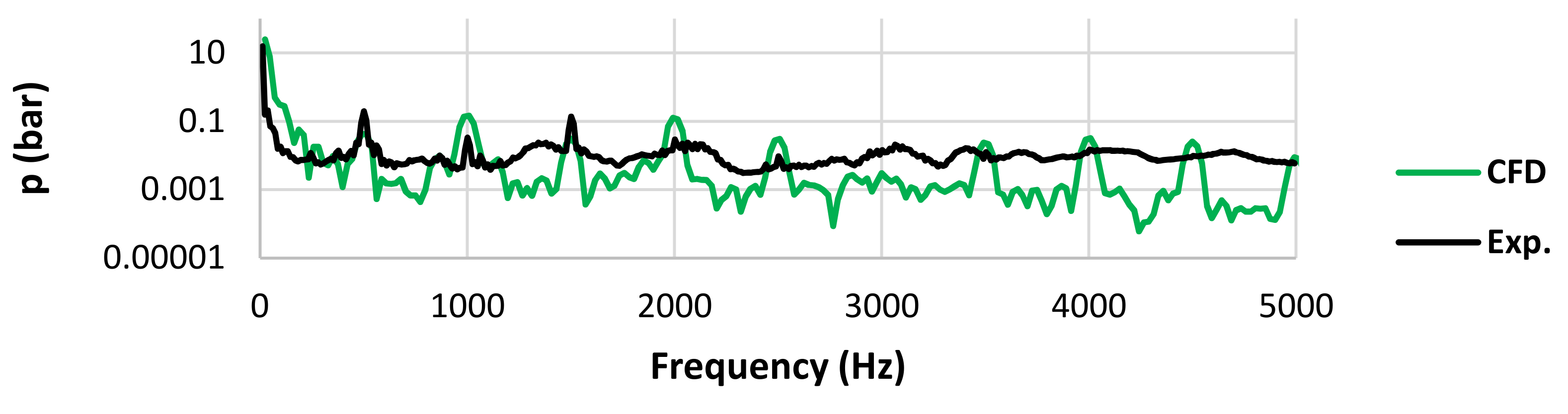
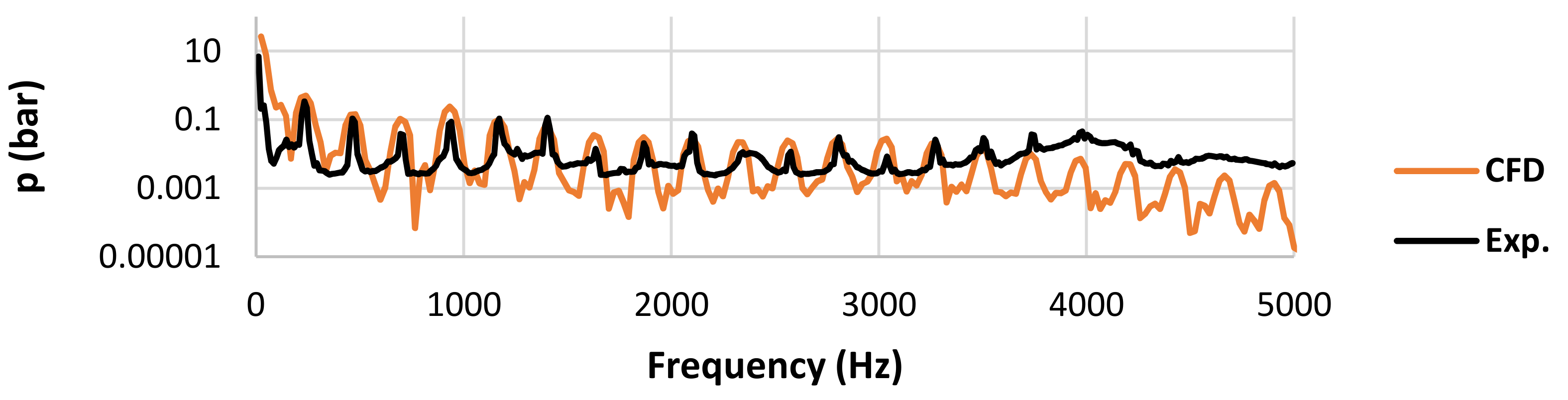
For both the IGP and the TMC pump, the deviation between CFD data and experimentally obtained data is smaller than for the BVP, which can be seen in
Figure 22 and
Figure 23. Both the blade passing frequencies and the amplitudes of the pressure ripple are reasonably captured in the low- and mid-frequency range. At higher frequencies, however, an increasing deviation can be observed for all pumps. Fluid structure interactions as well as additional vibrations in the test bench setup emerging from the driving engine and being transferred through the hydraulic circuit into the fluid, which are not incorporated in the CFD simulations, could be a reason for this.
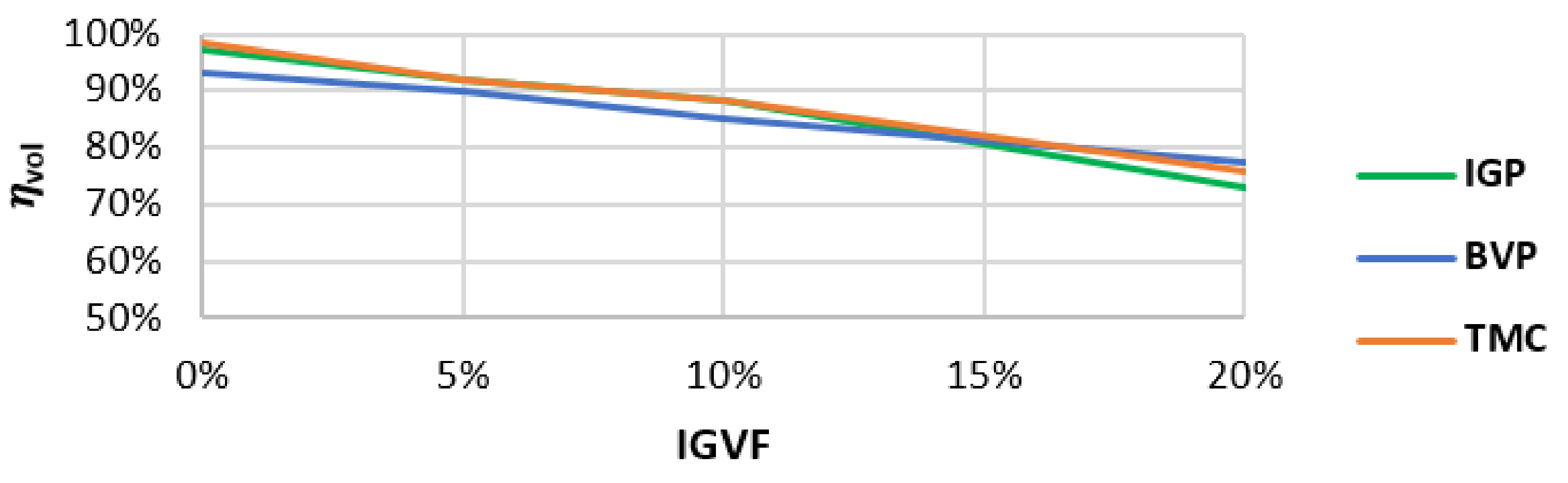
5.2. Setup Free Air (IGVF > 0)
When positive displacement pumps convey a multiphase flow with a nearly incompressible phase of oil and a strongly compressible phase of air, the volumetric efficiency decreases to a value below
as the IGVF of air increases. The CFD setup 2 (IGVF of free air, see
Table 2) is capable of predicting this drop for all three investigated pumps. The respective curves are displayed in
Figure 24.
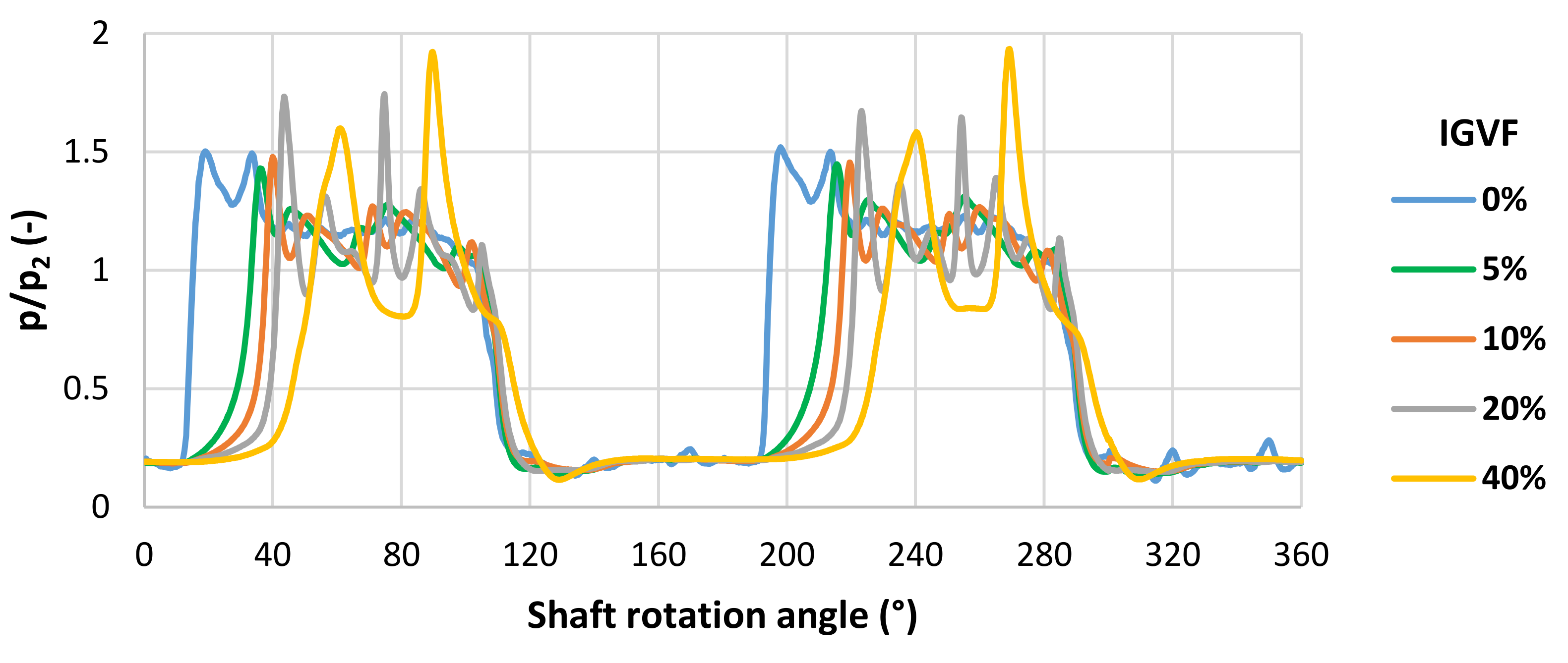
Besides the volumetric efficiency, the displacement chamber pressure profiles also change significantly when an IGVF > 0 is introduced. This was observed by the authors in [
20] for a simplified 2D model of a BVP. In
Figure 25, the influence of increasing the IGVF on the pressure profiles is shown for the BVP. With increasing IGVF, two effects occur. On the one hand, the pressure rise is delayed to higher shaft rotation angles with an increasing IGVF. The displacement chambers need more volume decline to achieve a pressure rise in the highly compressible mixture of oil and air than they need in pure oil. For the BVP, the pressure rise is delayed by 24.75° when the IGVF is at 10% compared to the pure oil with an IGVF = 0.
On the other hand, the pressure ripple while the displacement chamber is connected to the delivery port also increases with increasing IGVF. The increase in the amplitudes of the pressure ripple while the chamber is connected to the delivery port is especially strong in the BVP, as it can be seen in
Figure 25 when comparing it to the other two pumps in
Figure 26 and
Figure 27.
The height of the pressure surge, when the displacement chamber is connected to the delivery port seems not to be much affected by introducing an IGVF. In the 2D investigations of the authors in [
20], increasing the IGVF damped this pressure surge significantly. However, due to the missing third dimension, in the 2D case, this pressure surge is much higher, reaching values of
with pure oil. In the currently investigated 3D case of the BVP, this pressure surge is due to the grooves that are generally much smaller with values of
. Because of that, an increase in the IGVF does not lead to a significant reduction in this first pressure surge.
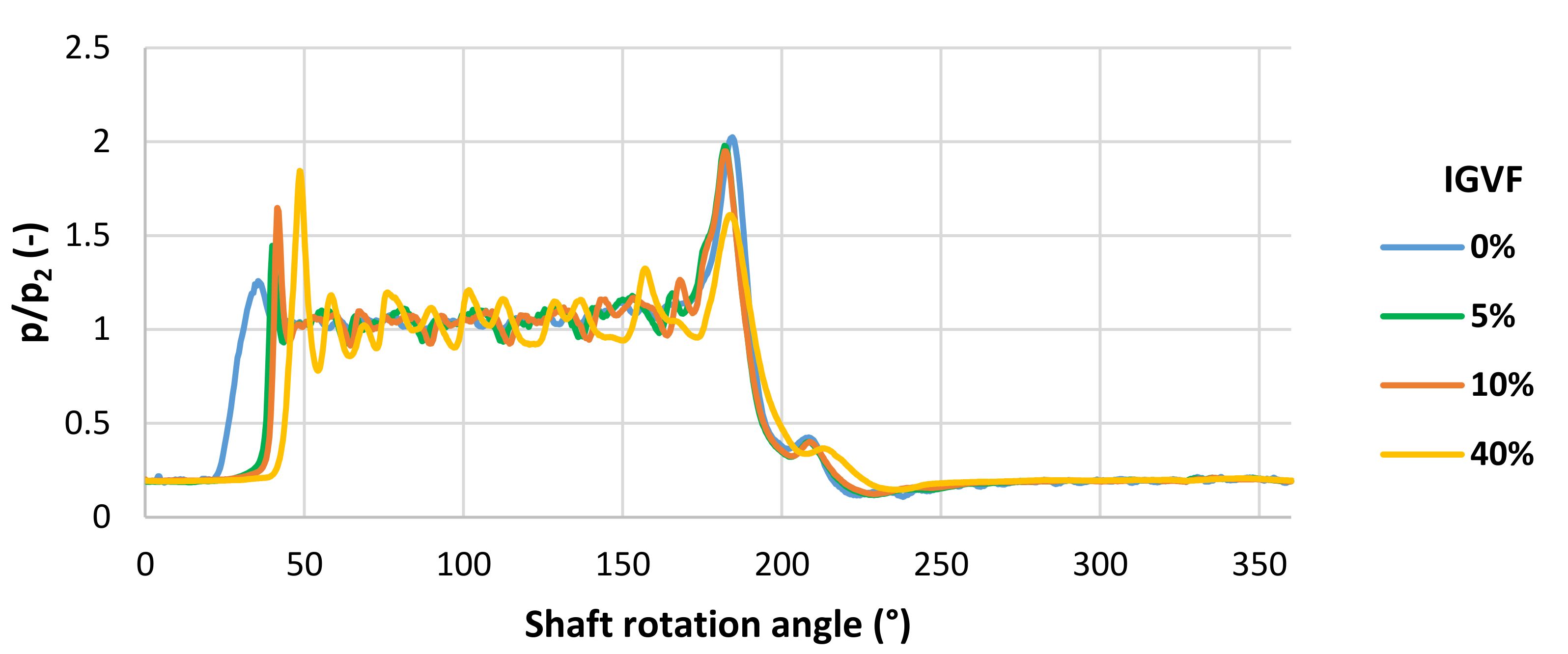
Looking at the pressure profiles for the IGP in
Figure 26, an increase in the IGVF does not decrease the height of the pressure surge when the displacement chamber connects to the delivery port but even increases it. With pure oil, this pressure surge in the IGP is lower than in the BVP, which means that the pump has a superior design with optimized control times at this operating point. A high pressure surge is, therefore, prevented with pure oil. The increased compressibility with free air, however, leads because of the specific and optimized control times and the compression ratio to a higher pressure difference when the displacement chamber connects to the delivery port. Thus, the pressure surge is intensified with an increasing IGVF. Contrary to that effect, the appearing pressure surge when the delivery port is disconnected is reduced with an increasing IGVF. Analog to the BVP, the pressure ripple while the displacement chamber is connected to the delivery port increases while increasing the IGVF. However, the amplitudes of the pressure ripple on the delivery port plateau are much smaller in the IGP compared to the BVP. The delay of the pressure rise with increasing IGVF can likewise be observed in the IGP. The pressure rise is delayed by 15° when the IGVF is at 10% compared to the pure oil with an IGVF = 0.
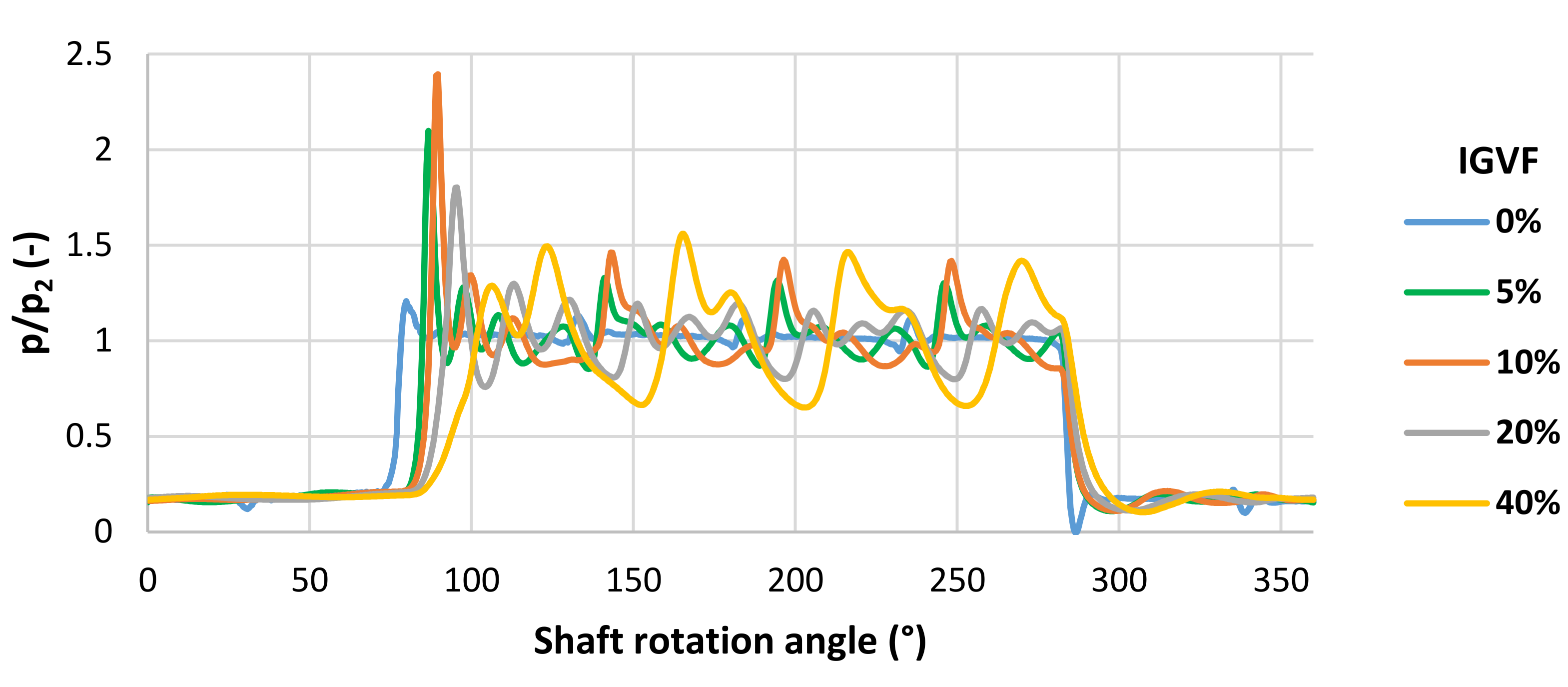
For the TMC pump, the same tendencies can be observed in
Figure 27. The first pressure surge is intensified by increasing the IGVF up to 10%, but then declines when the IGVF is further increased to 20 and 40%. In addition, this first pressure surge reaches values of
for 5 and 10% IGVF, which is higher than at both other pumps.
The same trend as in the other pumps applies to the amplitudes of the pressure ripple on the delivery port plateau. However, after intensifying the amplitudes of the pressure ripple up to an IGVF of 10%, a further increase up to 20% seams to lead to a decline analog to the pressure surge. At 40% IGVF, however, an intensification can be seen in
Figure 27 quite well again, and the pressure ripple amplitudes are the highest.
The delay of the pressure rise when an IGVF of 10% is applied compared to 0% is only 8.4° for the TMC pump. This appears to be due to the lower compression ratio of the displacement chambers compared to the other pumps (see
Table 1). The rotor channels, which are always connected to the displacement chambers forming between stator and rotor gear teeth, are an additional volume, which decreases the effective compression ratio. Therefore, the delay of the pressure rise with an IGVF of 10% is significantly smaller for the TMC pump than for the other pumps.
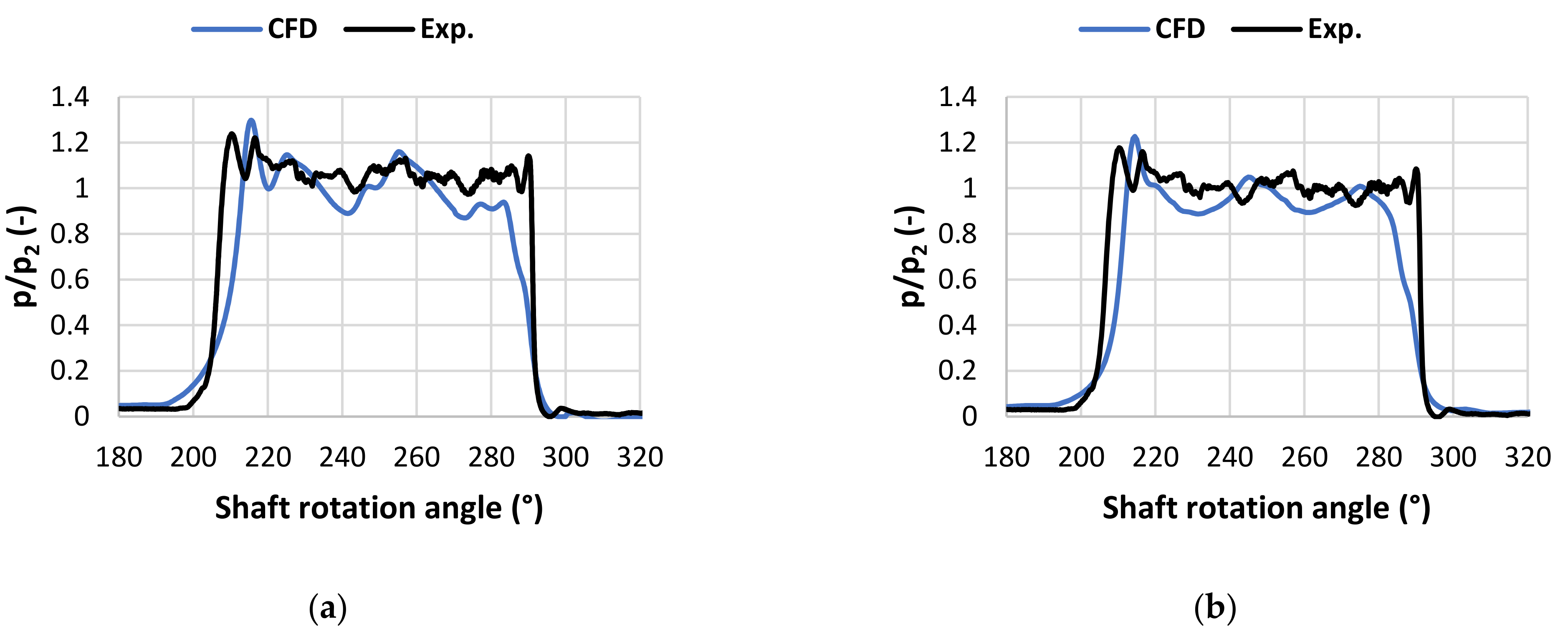
To validate the second CFD setup, experimental data for the displacement chamber pressure in the BVP are compared with data obtained from CFD simulations. Both profiles are plotted in
Figure 28a,b for two different operating points. Due to limitations of the test bench measurement, it is not possible to record the displacement chamber pressure profile for an IGVF > 5%.
Both analyzed operating points show a reasonable fit of the CFD data to the experimentally obtained pressure profiles. The CFD data, however, show an earlier and slower pressure rise than in the experiment. This seems to be because the radial and axial gaps of the CFD model have to be enlarged to 30 µm for the simulations with an IGVF > 0 in order to obtain convergence. The real dimensions of the axial and radial gaps, which are used for the simulations with the CFD setup cavitation, are one order of magnitude smaller, as it is described in
Section 3. Because of these artificially enlarged gaps, leakages through them are higher, and therefore, the pressure rise begins earlier and has a lower gradient as well as the pressure drop after the chamber disconnects from the delivery port begins earlier and is smoother.
The increased pressure ripple on the delivery port plateau is quite well captured by the CFD simulations, although it is a bit overpredicted. However, there are many assumptions in the multiphase flow modelling setup used in this work. This also applies to the experimental test setup. Although a precise measurement of the IGVF of air is possible by the CGS system, as described in
Section 4, no information regarding the phase morphology of the disperse air phase is available. For the CFD simulations, however, a mean air bubble diameter of 0.1 mm is assumed. Bearing in mind those limitations of the numerical as well as of the experimental analysis, it can be stated that the fit of the displacement chamber pressure profile for the BVP is quite reasonable.
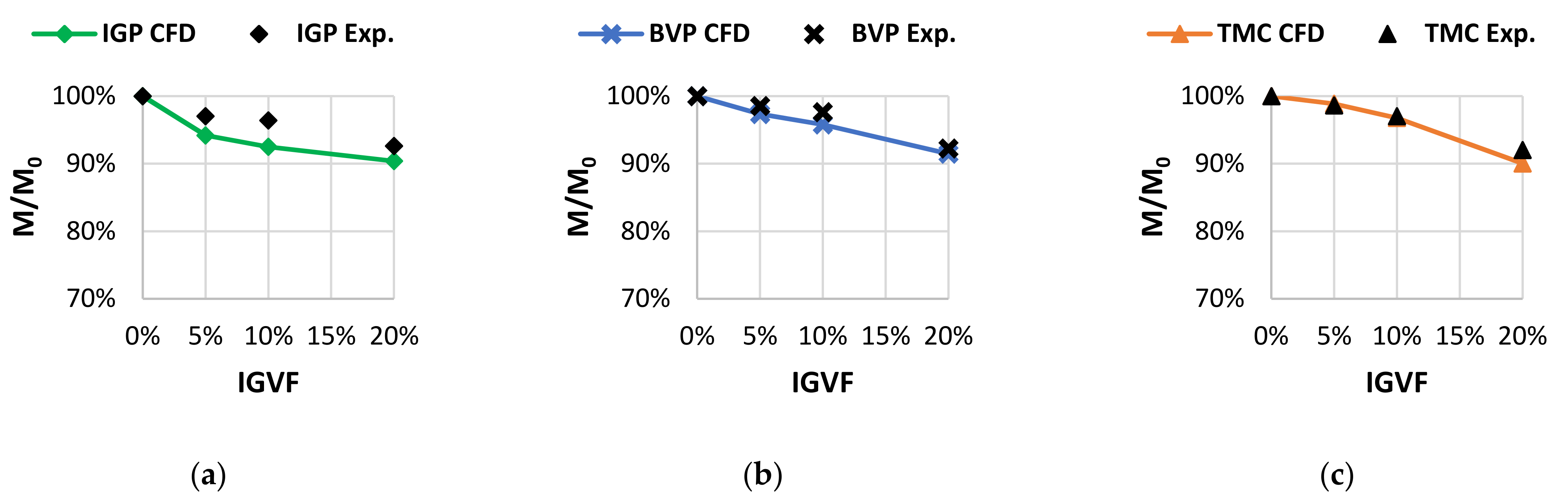
Another finding of the authors in [
20] is that with an increasing IGVF, the required power demand of the 2D pump decreases. As it could be seen in this chapter, the increasing compressibility of the mixture with increasing IGVF leads to a significant delay of the pressure rise in the displacement chamber. The time fraction, when delivery pressure is present in the chamber within one rotation, therefore, is reduced (see
Figure 25,
Figure 26,
Figure 27). This leads subsequently to a reduction in the mean required driving torque. This phenomenon is observed for all three investigated pumps. The required time-averaged driving torque
for an IGVF > 0 is compared to the required driving torque for pure oil
and displayed in
Figure 29. Besides the CFD results, data from the test bench measurements are also displayed.
The numerical results fit quite well to the experimental data for the BVP as well as for the TMC pump. For the IGP, the deviation is a bit higher, but the CFD simulations correctly predict the tendency of the driving torque drop, which can be seen in the experimental data.
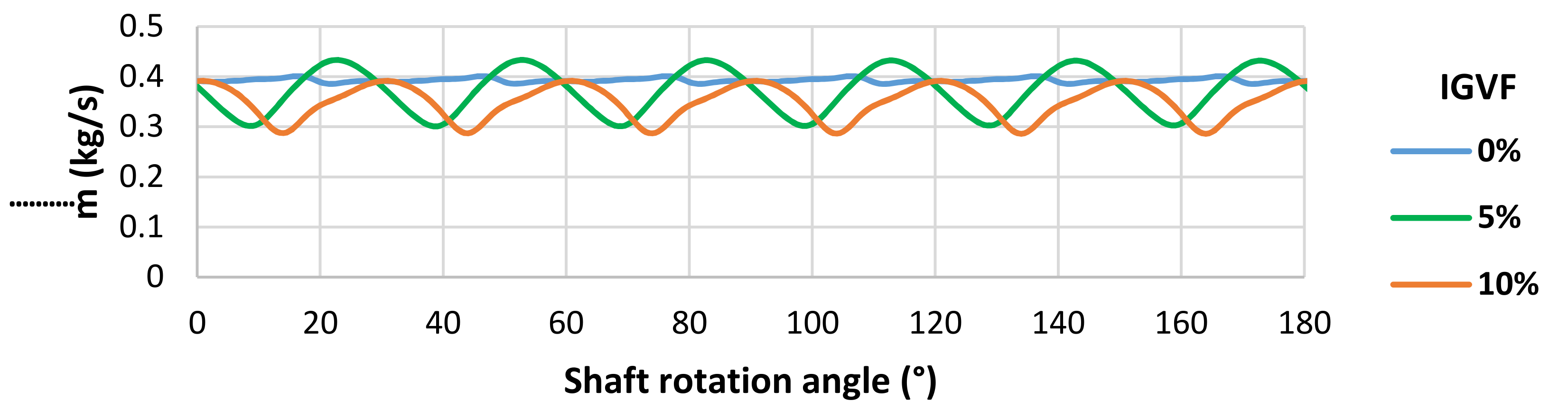
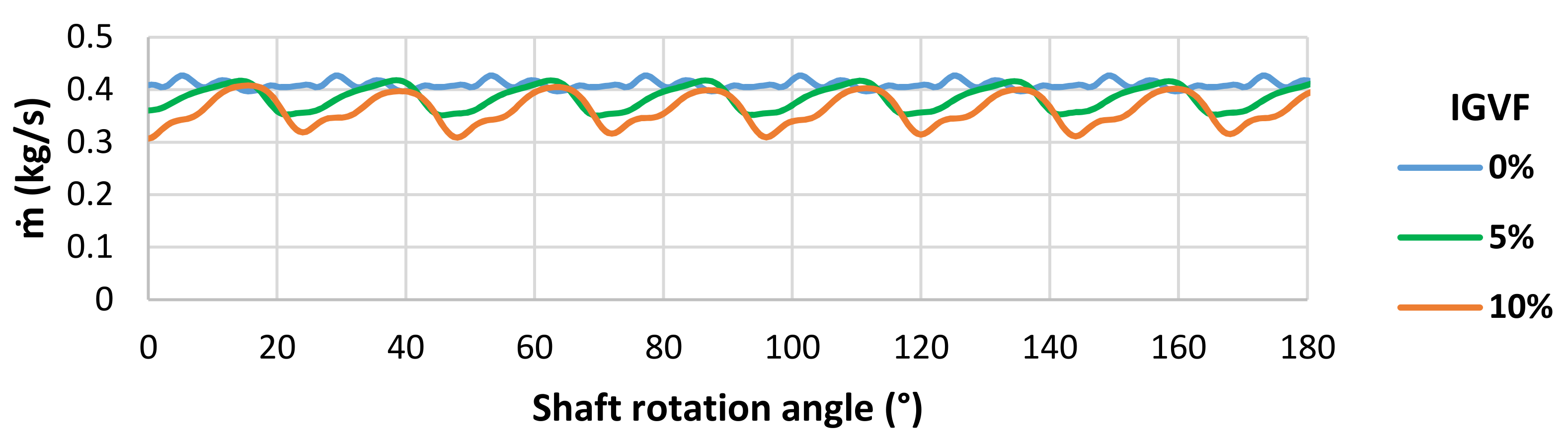
Besides the ripple in the displacement chamber pressure profile, the mass flow ripple at the delivery port outlet is another important aspect when analyzing multiphase flow pumping characteristics of a pump.
By increasing the IGVF, analog to the amplitude increase in the pressure ripple in the displacement chambers, the mass flow ripple at the delivery port outlet also increases. This can be observed in
Figure 30 and
Figure 31 for the BVP and the IGP, respectively. It seems that the increase in the mass flow ripple amplitudes in the BVP is a bit higher than it is in the IGP. This could be due to the difference in compression ratio. The BVP has a slightly lower compression ratio than the IGP (see
Table 1). Of course, the time-averaged mass flow decreases when the IGVF rises. This is due to the falling mixture density of the fluid.
Compared to both other pump types, the outlet mass flow ripple increase when the IGVF is raised is significantly stronger in the TMC pump. This can be clearly seen in
Figure 32. At 10% IGVF, there are shaft rotation angles where the mass flow is nearly at a value of zero. A further increase in the IGVF > 10% then leads to the occurrence of intermittent backflow of the oil–air mixture. An explanation for this phenomenon could be again the much lower compression ratio of the TMC pump compared to the IGP and the BVP. Because of that lower compression ratio, the mixture in the displacement chamber does not reach as high pressure levels before the chamber is connected to the delivery port and subsequently impinged with the delivery port pressure, as it does in both other pumps with higher compression ratios. Therefore, the pressure differences at that point in time are much higher in the TMC pump. This could also be observed in
Figure 25,
Figure 26,
Figure 27 where the TMC pump showed the highest pressure surges with IGVF > 0 when the displacement chamber connects to the delivery port. Subsequently, a stronger backflow of the mixture from the delivery port into the displacement chamber while the fluid is pushed out can be expected. This results in a higher mass flow and pressure ripple. In the BVP and the IGP, the higher compression ratios lead to lower pressure differences when the displacement chambers connect to the delivery port. Consequently, lower pressure ripple and mass flow ripple at the outlet can be observed. Nevertheless, there is the potential to enhance the design of the TMC pump to achieve a higher compression ratio comparable to the other two pumps. This needs to be further investigated.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}