
Power System Stability Enhancement Using a Novel Hybrid Algorithm Based on the Water Cycle Moth-Flame Optimization


Abstract
:1. Introduction
- The hybrid method WCMFO has been applied and adapted for the first time to optimize the settings of three different control systems (PSS; PSS-PID; PSS-FOPID) in order to improve the stability performance of the electrical grid.
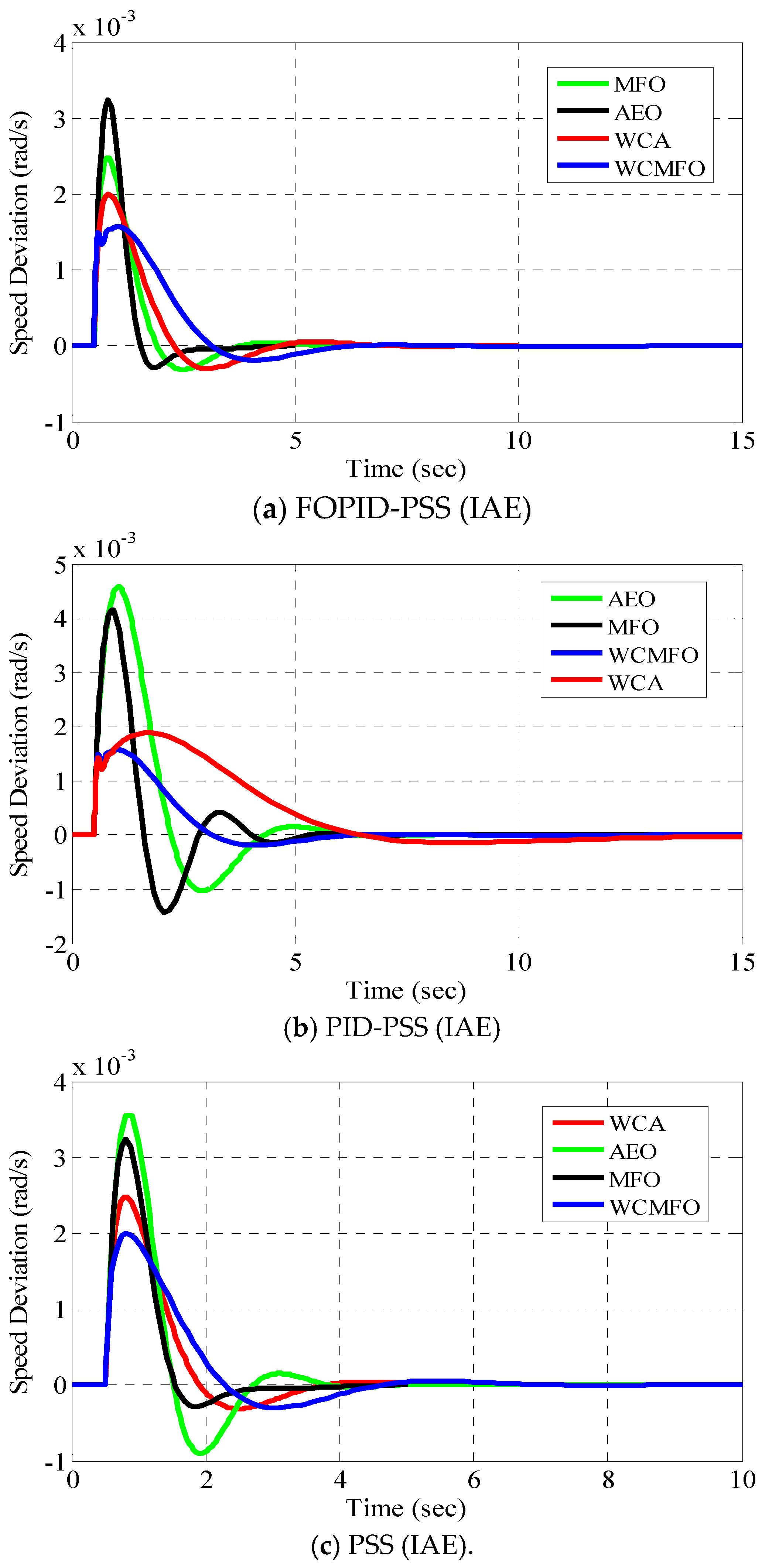
- The WCMFO outperforms the other meta-heuristic algorithms by obtaining significantly better solutions in reducing overshoot, damping oscillations, and settling time.
- The presented model in this article provides a more realistic and accurate stabilization of power system without performing time-consuming simulations.
- The developed model aims to improve the electrical network stability via the minimization of the angular speed deviation in the presence of a severe disturbance event.
2. Power System Modeling
3. Transient Stability and the Proposed Stabilizers
3.1. Transient Stability
3.1.1. Definition
3.1.2. Swing Equation
3.2 Description of the Proposed Stabilizers
3.2.1. Power System Stabilizer (PSS)
3.2.2. PID Based PSS
3.2.3. FOPID Based PSS
3.2.4. Objective Function
3.2.5. Fault Type Selection
4. Hybrid WCMFO Algorithm
WCMFO’s Mathematical Model
- Step1:
- Initialization
- -
- Set the initial parameters Nsr, Npop, max-iter.
- -
- Generate a random initial population using Equation (9) to generate the raindrops values for the population matrix given in Equation (10).
- Step2:
- Sea, rivers and stream creation.
- -
- The cost functions for each flow in the initial population matrix is calculated using:where; .
- -
- The minimum value in raindrops is considered as a sea.
- Step3:
- Determination of the Intensity of rivers and sea by:
- Step4:
- Exploitation phase
- Step5:
- Evaporation condition and rain process
- -
- Assess the evaporation state with:dmax: is a value that adaptively decreases by:
- -
- Rain process:
- Step6:
- Convergence criteria
5. Results and Discussion
5.1. Analysis Strategy
- -
- The overshoots
- -
- Power system oscillations
- -
- Settling time
5.2. Simulation Results
- ➢
- First Part
- ➢
- Second Part
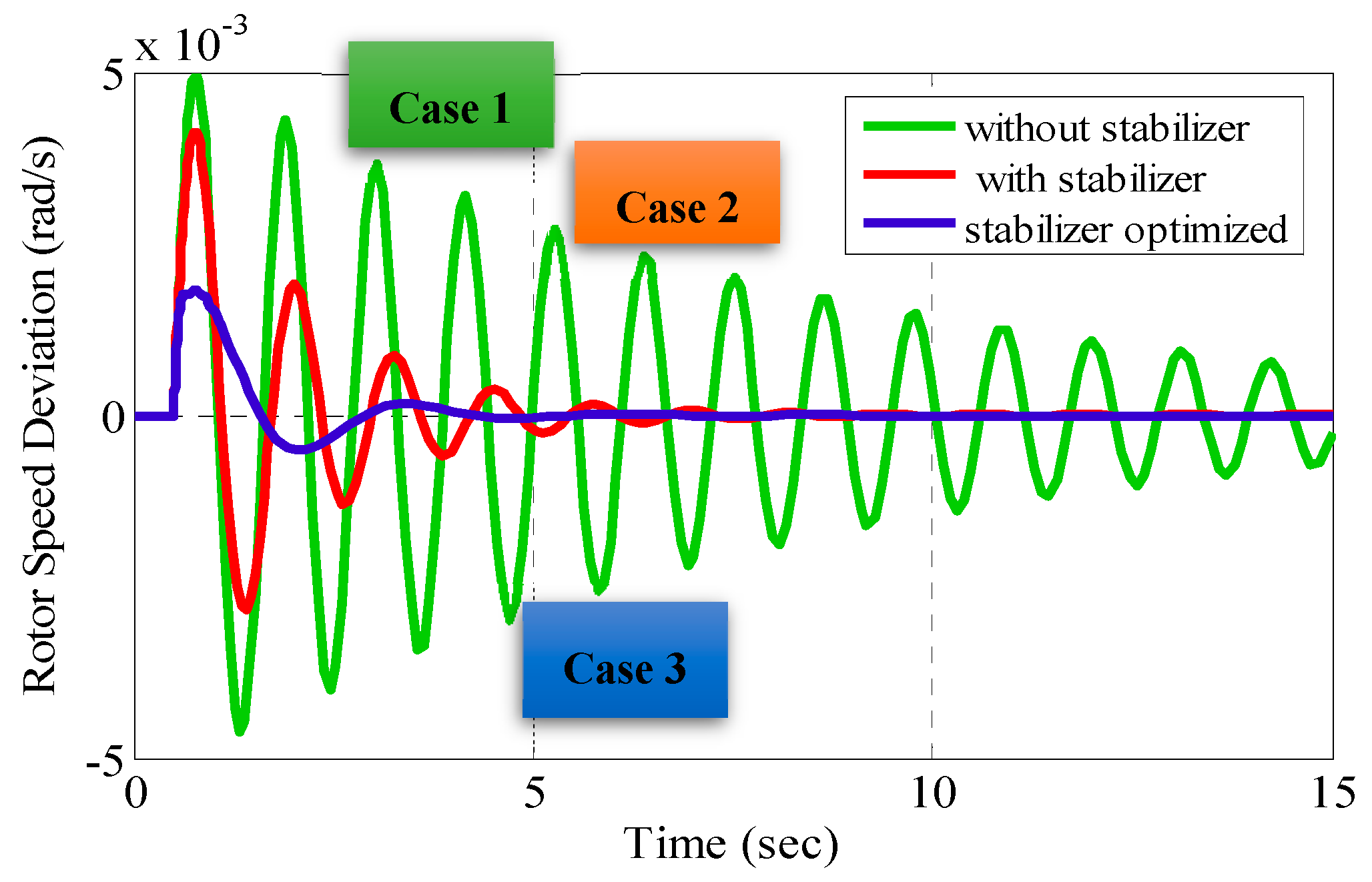
5.2.1. Case 1: System Analysis without Stabilizer
5.2.2. Case 2: System Analysis with Stabilizer Integration
5.2.3. Case 3: Setting the Stabilizer Parameters
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Ci | Cost function |
| D | Represents a damping torque anytime the generator deviates from its synchronous speed. |
| e(t) | Error |
| H | Normalized inertia constant |
| Ki | The integral constant |
| Kd | The differential constant |
| Kp | The proportional constant |
| Kpss | Gain |
| LB | Lower Bound |
| max-iter | Maximum number of iterations |
| Npop | Population size |
| Nsr | Number of rivers + the sea |
| Nsn | Streams numbers which flow in rivers or sea |
| Nvar | Number of decision variables |
| PI | Performance Indices |
| Qepu | Generated electric power added to electric losses in (p.u) |
| Qmpu | Difference between the mechanical power provided by the prime mover and the mechanical losses in (p.u) |
| rand | Random number |
| tsim | The simulation time |
| T | Time in seconds |
| Tw | High-pass filter of time constant |
| T1, T2, T3 and T4 | Lead-lag structured phase compensation blocks |
| TF | Transfer function |
| UB | Upper Bound |
| Greek symbols | |
| δ | Rotor angle referred to the synchronous reference axis in (rad) |
| Fractional-order derivative element | |
| Fractional-order integral element | |
| ∆ω | The synchronous speed deviation |
| syn | Synchronous radian frequency |
| pu | Frequency in (p.u) |
Appendix A
| Parameters | Value (p.u) |
| Line impedance | 0.02 + j 0.65 |
| D-axis reactance, | 1.81 |
| Q-axis reactance, | 1.76 |
| Armature resistance, | 0.003 |
| Infinite bus Voltage, | 1 |
| Inertia constant, | 3.5 |
| Rated speed, | 377 |
| Field circuit time constant, | 8 (s) |
| Daming factor, | 0 |
| Regulation gain, | 200 |
| Exciter time constant, | 1 |
| Exciter gain, | −0.05 |
| Time constant, | 10 |
| Nominal loads, | 0.5, 0.3 |
| Frequency | 60 HZ |
References
- Keskes, S.; Bouchiba, N.; Sallem, S.; Larbi, C.A.; Kammon, M.B.K. Transient Stability Enhancement and Voltage Regulator in SMIB Power System using SVC with PI Controller. In Proceedings of the 6th International Conference on Systems and Control, Batna University, Batna, Algeria, 7–9 May 2017. [Google Scholar]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and Classification of Power System Stability. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Keskes, S.; Bouchiba, N.; Sallem, S.; Larbi, C.A.; Kammon, M.B.K. Optimal Tuning of Power System Stabilizer using Genetic Algorithm to Improve Power System Stability. In Proceedings of the International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017. [Google Scholar]
- Kim, S.; Overbye, T.J. Optimal Subinterval Selection Approach for Power System Transient Stability Simulation. Energies 2015, 8, 11871–11882. [Google Scholar] [CrossRef] [Green Version]
- Gurunath, G.; Indraneel, S. Power System Stabilizers Design for Interconnected Power Systems. IEEE Trans. Power Syst. 2010, 25, 1042–1051. [Google Scholar]
- Bamasak, S.M.; Bensenouci, A. Tuning of fractional order PID Controller for TCSC-based stabilizer. In Proceedings of the IEEE International Energy Conference (ENERGYCOM), Cavtat, Croatia, 13–16 May 2014. [Google Scholar]
- Kumar, P.S. Transient Stability Enhancement of Power System Using TCSC. Int. J. Electr. Comput. Eng. (IJECE) 2012, 2, 317–324. [Google Scholar] [CrossRef]
- Bayu, E.S.; Khan, B.; Ali, Z.M.; Alaas, Z.M.; Mahela, O.P. Mitigation of Low-Frequency Oscillation in Power System through Optimal Design of Power System Stabilizer Employing ALO. Energies 2022, 15, 3809. [Google Scholar] [CrossRef]
- Javad, M.; Rasool, K.; Mohammad, R.A.; Hossein, M. Novel Coordination of Dual Channel PSS, AVR and TCSC Damping Controller to Enhance Power System Overall Stability. In Proceedings of the 20th Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 15–17 May 2012. [Google Scholar] [CrossRef]
- Sheshnarayan, B.V.; Prabin, K.P. Design PID Controller based PSS using Cuckoo Search Optimization Technique. In Proceedings of the 4th International Conference on Recent Trends on Electronics, Information, Communication and Technology (RTEICT), Bangalore, India, 17–18 May 2019. [Google Scholar]
- Lakhdar, C.; Abdelghani, C.; Salem, A. Optimal Design and Tuning of Novel Fractional Order PID Power System Stabilizer using a New Metaheuristic Bat Algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Vijayakumar, K.; Manigandam, T. Nonlinear PID controller Parameter Optimization using Enhanced Genetic Algorithm for Nonlinear Control System. J. Control. Eng. Appl. Inform. 2016, 18, 3–10. [Google Scholar]
- Boucetta, I.; Naimi, D.; Salhi, A.; Zellouma, L. Water Cycle Algorithm Applied to Improve Transient Power System Stability. In Proceedings of the 1th International Conference on Communication, Control System Processing (CCSSP), El Oued, Algeria, 16–17 May 2020. [Google Scholar] [CrossRef]
- Khalilpourazari, S.; Khalilpourazary, S. An efficient hybrid algorithm based on Water Cycle and Moth-Flame Optimization Algorithms for Solving Numerical and Constrained Engineering Optimization Problems. Soft Comput. Methods Appl. 2019, 23, 1699–1722. [Google Scholar] [CrossRef]
- Ben Messaoud, R. Parameters Determination of Proton Exchange Membrane Fuel Cell Stack Electrical Model by Employing the Hybrid Water Cycle Moth-Flame Optimization Algorithm. Int. J. Energy Res. 2020, 16, 4694–4708. [Google Scholar] [CrossRef]
- Dipu, S.; Sagar, K. Optimal Over Current Relay Coordination in Microgrid using a Novel Hybrid Water Cycle Moth-Flame Algorithm. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 553–564. [Google Scholar] [CrossRef]
- Boucetta, I.; Naimi, D.; Salhi, A.; Zellouma, L. Enhancement of Power System Transient Stability with a Large Penetration of Solar Photovoltaic using FACTS. In Proceedings of the 4th International Conference on Electrical Engineering and Control Application (ICEECA), Constantine, Algeria, 17–19 December 2019; Springer: Berlin/Heidelberg, Germany, 2019; Volume 682, pp. 533–547. [Google Scholar]
- Hadi, E.; Ali, S.; Ardeshir, B.; Mohd, H. Water Cycle Algorithm—A Novel Metaheuristic Optimization Method for Solving Constrained Engineering Optimization Problems. Comput. Struct. 2012, 110–111, 151–166. [Google Scholar] [CrossRef]
- Saydali, M. Moth-Flame Optimization Algorithm: A novel nature inspired heuristic paradigm. Knowl. Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Jamil, A.A.; Tu, W.F.; Ali, S.W.; Terriche, Y.; Guerrero, J.M. Fractional-Order PID Controllers for Temperature Control: A Review. Energies 2022, 15, 3800. [Google Scholar] [CrossRef]
- Akbar Khan, I.; Alghamdi, A.S.; Jumani, T.A.; Alamgir, A.; Awan, A.B.; Khidrani, A. Slap swarm Optimization Algorithm-Based Fractional Order PID Controller for Dynamic Response and Stability Enhancement of an Automatic Voltage Regulator System. Electronics 2019, 8, 1472. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | PSS | PSS-PID | PSS-FOPID |
|---|---|---|---|
| Number of Iteration | 50 | 50 | 50 |
| Number of Population (Nvars × 3) | 15 | 24 | 30 |
| Decision Variables (Nvars) | 5 | 8 | 10 |
| Stabilizers Parameters | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Kps | T1 | T2 | T3 | T4 | Kp | Ki | Kd | |||
| Min | 0.1 | 0.01 | 0.01 | 0.01 | 0.01 | 0.001 | 0.001 | 0.001 | 0.1 | 0.1 |
| Max | 5 | 2 | 2 | 2 | 2 | 1.2 | 1.2 | 1.2 | 0.9 | 0.9 |
| Stabilizer Parameters | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Stabilizers | PI | Kps | T1 | T2 | T3 | T4 | Ki | Kp | Kd | ||
| PSS_ FOPID | IAE | 4.9987 | 0.0345 | 0.1957 | 2 | 0.618 | 1.2 | 1.2 | 1.2 | 0.1 | 0.8019 |
| ISE | 5 | 2 | 0.6882 | 1.9891 | 0.6883 | 1.2 | 1.1989 | 1.2 | 0.1 | 0.7926 | |
| ITAE | 4.9896 | 0.01 | 0.7025 | 2 | 0.1554 | 1.1954 | 1.2 | 1.1987 | 0.1 | 0.8183 | |
| PSS_PID | IAE | 5 | 2 | 0.5901 | 2 | 0.1478 | 1.2 | 1 × 10−3 | 0.001 | ||
| ISE | 5 | 2 | 0.6468 | 1.1145 | 0.6468 | 1.2 | 1.2 | 1× 10−3 | |||
| ITAE | 5 | 1.9332 | 0.6118 | 2 | 0.1447 | 1.2 | 1 × 10−3 | 1 × 10−3 | |||
| PSS | IAE | 3.3204 | 1.0799 | 0.9917 | 1.5239 | 1.9805 | |||||
| ISE | 5 | 0.2924 | 0.8689 | 1.997 | 0.822 | ||||||
| ITAE | 2.9575 | 1.9998 | 1.1218 | 0.9513 | 1.999 | ||||||
| Objective Function Values (rad/s) | ||||
|---|---|---|---|---|
| PI | PSS_FOPID | PID_PSS | PSS | |
| WCMFO | IAE | 0.00184 | 0.001902 | 0.002203 |
| ISE | 2.84 × 10−6 | 3.34 × 10−5 | 6.31 × 10−5 | |
| ITAE | 0.001763 | 0.001828 | 0.002065 | |
| WCA | IAE | 0.002004 | 0.002154 | 0.002329 |
| ISE | 3.28 × 10−5 | 3.36 × 10−5 | 1.00 × 10−4 | |
| ITAE | 0.002154 | 0.002269 | 0.002154 | |
| MFO | IAE | 0.002033 | 0.002094 | 0.002208 |
| ISE | 3.29 × 10−5 | 4.41 × 10−5 | 1.04 × 10−4 | |
| ITAE | 0.002109 | 0.002176 | 0.002103 | |
| AEO | IAE | 0.002105 | 0.002144 | 0.002327 |
| ISE | 3.51 × 10−5 | 3.37E-05 | 1.05 × 10−4 | |
| ITAE | 0.002313 | 0.002341 | 0.002204 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boucetta, I.; Naimi, D.; Salhi, A.; Abujarad, S.; Zellouma, L. Power System Stability Enhancement Using a Novel Hybrid Algorithm Based on the Water Cycle Moth-Flame Optimization. Energies 2022, 15, 5060. https://0-doi-org.brum.beds.ac.uk/10.3390/en15145060
Boucetta I, Naimi D, Salhi A, Abujarad S, Zellouma L. Power System Stability Enhancement Using a Novel Hybrid Algorithm Based on the Water Cycle Moth-Flame Optimization. Energies. 2022; 15(14):5060. https://0-doi-org.brum.beds.ac.uk/10.3390/en15145060
Chicago/Turabian StyleBoucetta, Ikram, Djemai Naimi, Ahmed Salhi, Saleh Abujarad, and Laid Zellouma. 2022. "Power System Stability Enhancement Using a Novel Hybrid Algorithm Based on the Water Cycle Moth-Flame Optimization" Energies 15, no. 14: 5060. https://0-doi-org.brum.beds.ac.uk/10.3390/en15145060