
Evolutionary Multi-Objective Optimization Applied to Industrial Refrigeration Systems for Energy Efficiency



Abstract
:1. Introduction
2. System’s Structure
3. Related Works
4. Problem Formalization
- Maximizing the effectiveness of the cooling tower;
- Minimizing the overall energy consumption of the refrigeration system.
4.1. Objective Functions
Restrictions
5. Evolutionary Algorithms for Multi-Objective Optimization
5.1. SPEA2
- Step 1
- Initialization: Initially, two populations are generated: a random initial population and an initial external population, termed file, such that . Variable t is defined and set to 0, which must be incremented with each new generation of new non-dominated individuals.
- Step 2
- Fitness evaluation: Each solution in the current populations and is evaluated with respect to the objective functions. Then, it is evaluated with respect to dominance relationships. So, each individual is evaluated in relation to the individuals that it dominates and to those that dominate it. When this step is performed for the first time, only individuals from population will be evaluated. Therefore, each individual i of population and in file will be assigned a value called strength, represented by . The strength of individual i coincides with the number of solutions individual i actually dominates, and it is defined as in Equation (8):Moreover, each individual is associated with a value called raw fitness that is equivalent to the sum of the strengths of all the individuals that dominate the individual under analysis, both in the population and in the file, as defined in Equation (9):Note that the strength of a given individual i will be higher when more individuals are dominated by i, and its raw fitness will be lower when less individuals dominate i. Although the raw fitness provides assignments to individuals based on Pareto dominance, if there are many individuals with identical raw fitness values, this mechanism may fail. Therefore, SPEA2 uses neighborhood density information to effectively guide the search. An adaptation of the kth-nearest neighbor method is used, wherein the density at any point is a function of the distance to the kth-nearest neighbor. In this case, SPEA2 simply takes the inverse of the distance to the kth-nearest neighbor as an estimate of the density. The most accurate way to estimate neighborhood density is to calculate the Euclidean distance in the feasible region from an individual i to each individual j in the file and in the population, and store the obtained values in a list. Another possible way is to consider the term as a common point and list the results obtained for all individuals. After sorting the list in ascending order. The kth neighbor will be the one that gives the smallest distance sought, denoted by . Therefore, the density , corresponding to the individual i, is defined as in Equation (10):Note that constant 2 is added to the denominator in order to ensure that its value is greater than zero, and that the density is always less than 1. Finally, the fitness value of the individual is simply defined by . It is noteworthy to mention that the lower the value of an individual’s fitness, the more apt it is, and hence the more chances it will have to propagate over generations and disseminate its characteristics to other individuals.
Algorithm 1 Main steps of SPEA2. Require:, , Ensure: A 1: generate randomicallt, with 2: generate 3: ; 4: while true do 5: compute Fitness in and 6: copy non-dominated solutions in and to 7: then 8: repeat 9: reduce Using slicing algorithm 10: 11: then 12: repeat 13: complete with and 14: 15: end if 16: then 17: save in A the set of non-dominated solution of 18: halt 19: else 20: apply selection binary operator with reposition in 21: apply recombination operator 22: apply mutation operator 23: save in the genetic operators’ results 24: 25: end if 26: end while - Step 3
- Contextual selection: In this step, all non-dominated individuals from population and file are copied to next generation file . If the size of exceeds , it must reduce use of the slicing algorithm. If the size of is smaller than , must be completed using the best dominated individuals in and . The slicing algorithm is an iterative process that eliminates, at each iteration, the individual with the smallest Euclidean distance to the nearest neighbor. In the case of a tie, the second smallest Euclidean distance is verified, and so on. The iterative process ends when the population dimension of .
- Step 4
- Finalization: If , or any other used stopping criterion is satisfied, A is defined as the set of non-dominated individuals that represent the best solution in and for the optimization process. If the stopping conditions are not yet met, proceed with the selection at Step 5.
- Step 5
- Selection: In this step, individuals are selected through the selection operator by a tournament, whose winners are the individuals with the lowest fitness value.
- Step 6
- Crossover and mutation: In this step, the selected individuals are recombined using crossover and mutation operators, thus generating the new individuals of population . Then, the generation counter is incremented () and the fitness calculation at Step 2 is to be returned to.
5.2. NSGA-II
| Algorithm 2 Main steps of NSGA-II. |
| Require: |
| Ensure: |
| 1: ; Generate randomically with ; |
| 2: Apply tournament selection |
| 3: Apply crossover, recombining solutions; Apply mutation; Generate |
| 4: while do |
| 5: ; Sort using non-dominance; ; |
| 6: while do |
| 7: Compute crowding distance for |
| 8: if last spots in then |
| 9: Sort regarding crowding operator () |
| 10: |
| 11: else |
| 12: |
| 13: end if |
| 14: |
| 15: end while |
| 16: Apply crossover, recombining solutions; Apply mutation; Generate |
| 17: |
| 18: end while |
| Algorithm 3 Crowding distance procedure. |
| Require: |
| Ensure: |
| 1: |
| 2: |
| 3: for do |
| 4: |
| 5: end for |
| 6: for each do |
| 7: Sort regarding objective |
| 8: |
| 9: |
| 10: for do |
| 11: |
| 12: end for |
| 13: end for |
5.3. MicroGA
| Algorithm 4 Main steps of Micro-GA. |
| Require:, |
| Ensure:E |
| 1: generate initial population P randomically, with |
| 2: distribute P between the two portions of M |
| 3: |
| 4: while do |
| 5: choose initial for the Micro-GA from M |
| 6: repeat |
| 7: /* Micro-GA cycle */ |
| 8: perform binary tournament selection based on dominance relationship |
| 9: apply recombination operator |
| 10: apply mutation operator |
| 11: apply elitism keeping only one non-dominated solution |
| 12: until nominal convergence is reached |
| 13: copy two non-dominated solutions from to the external memory E |
| 14: if E is full when trying to insert non-dominated solution into then |
| 15: apply the adaptive grid |
| 16: end if |
| 17: copy two non-dominated solutions from to M, (replaceable portion) |
| 18: if mod then |
| 19: apply the replacement cycle |
| 20: end if |
| 21: |
| 22: end while |
6. Performance Results
6.1. System Parameters
6.2. Stopping Criteria
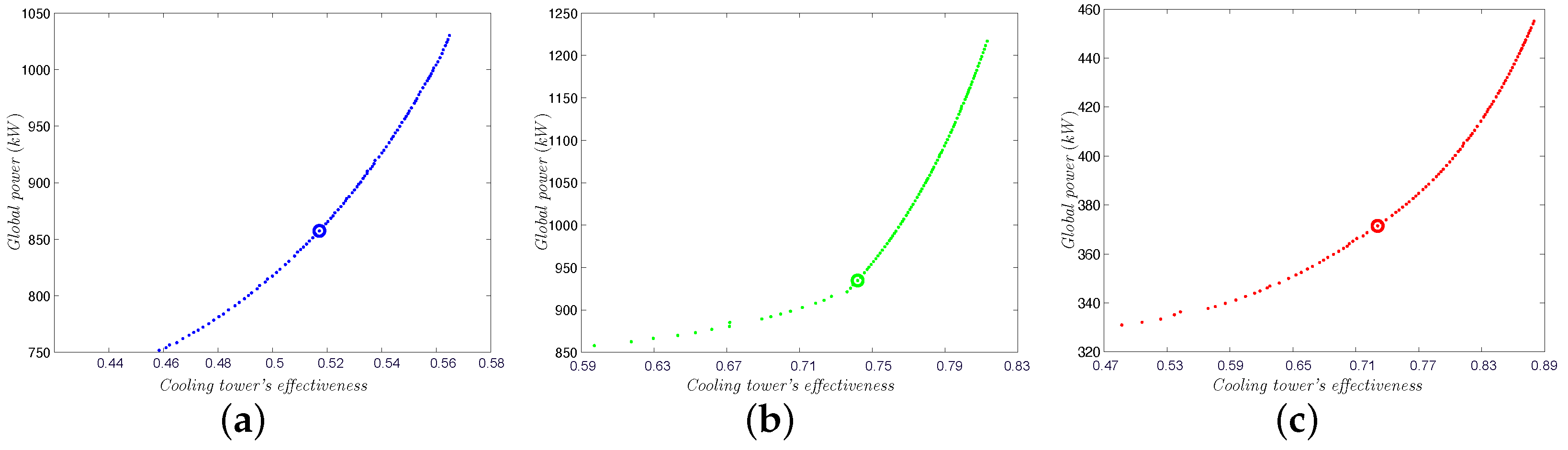
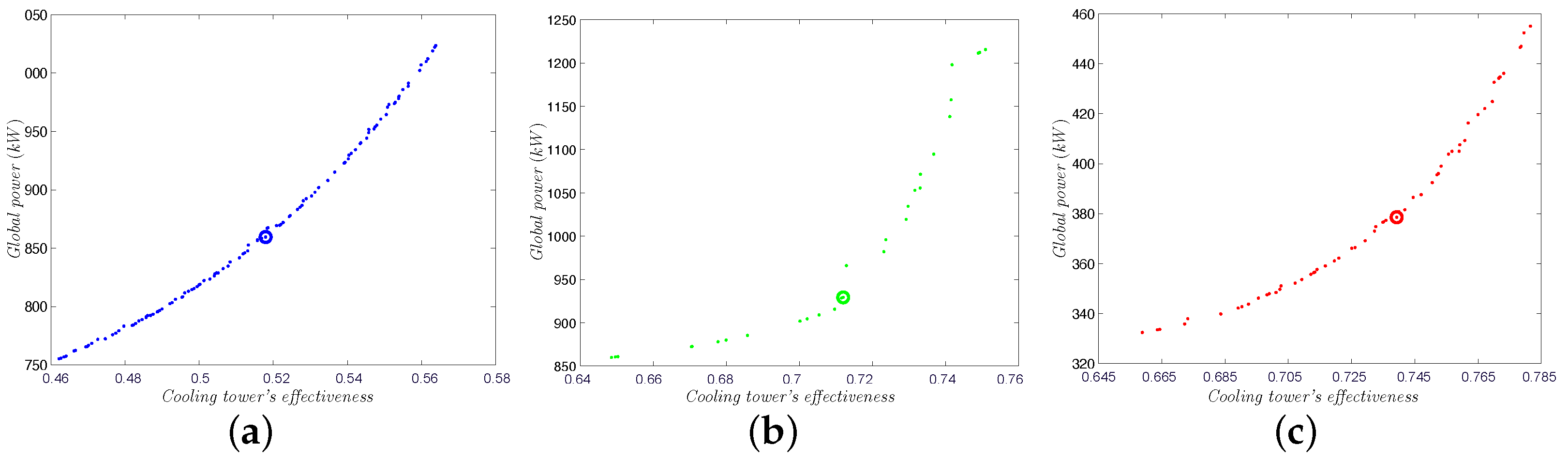
6.3. Preferred Solution Selection
6.4. SPEA2’s Performance Results
6.5. NSGA-II’s Performance Results
6.6. Micro-GA’s Performance Results
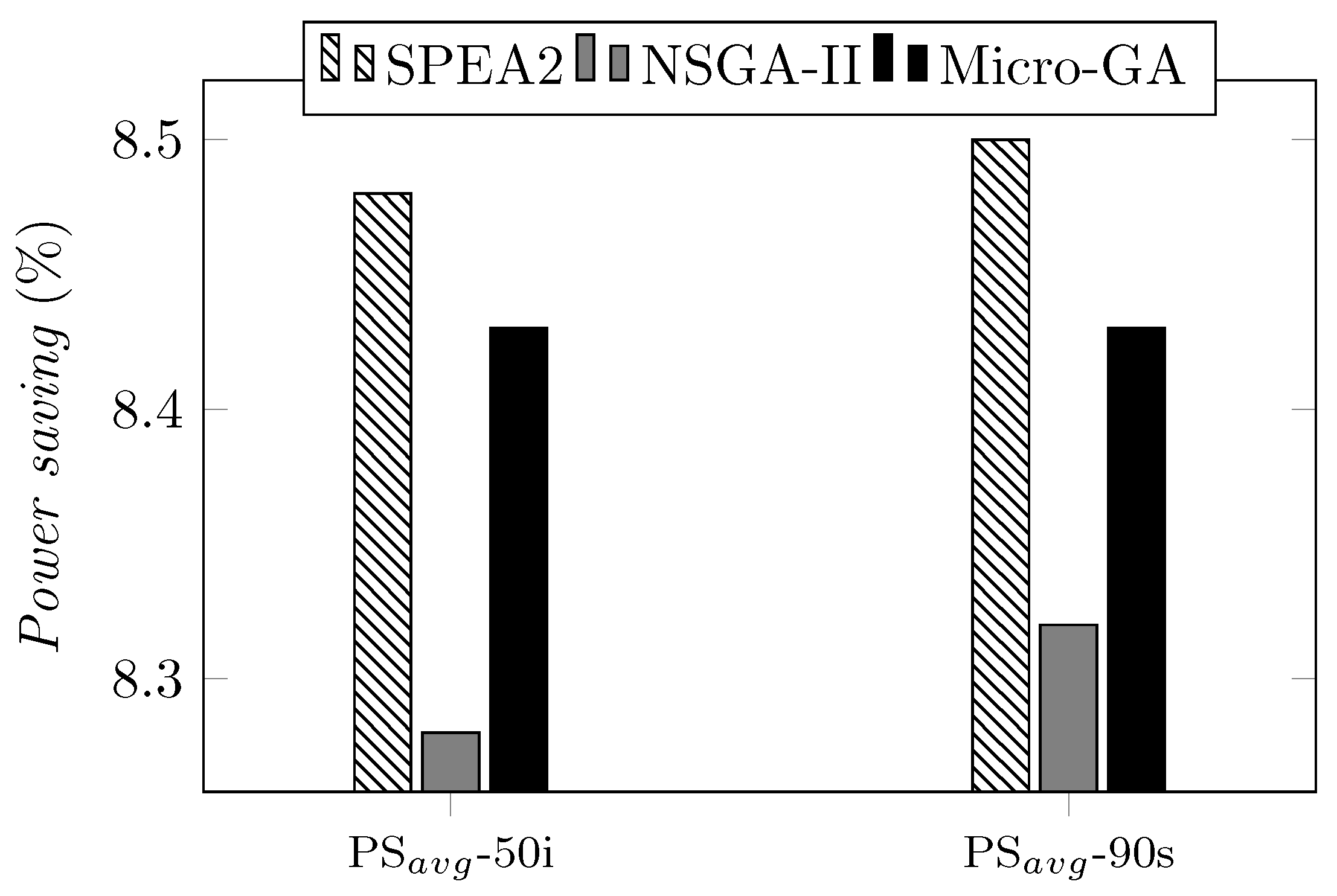
7. Performance Comparison
- The average, minimum and maximum savings obtained in terms of power consumption by the refrigeration system;
- The average, minimum and maximum effectiveness reached for the cooling tower;
- The ratio between the average savings in terms of overall power consumption and the corresponding reduction in terms of average effectiveness of the cooling tower;
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dondapati, R.S.; Saini, V.; Verma, K.N.; Usurumarti, P.R. Computational prediction of pressure drop and heat transfer with cryogen based nanofluids to be used in micro-heat exchangers. Int. J. Mech. Sci. 2017, 130, 133–142. [Google Scholar] [CrossRef]
- Dondapati, R.S.; Rao, V. Entropy generation minimization (EGM) to optimize mass flow rate in dual channel cable-in-conduit conductors (CICCs) used for fusion grade magnets. Fusion Eng. Des. 2014, 89, 837–846. [Google Scholar] [CrossRef]
- Chakravarthy, V.; Shah, R.; Venkatarathnam, G. A Review of Refrigeration Methods in the Temperature Range 4–300 K. J. Therm. Sci. Eng. Appl. 2011, 3, 020801. [Google Scholar] [CrossRef]
- Yu, K.; Hung, Y.; Hsieh, S.; Hung, S. Chiller Energy Saving Optimization Using Artificial Neural Networks. J. Appl. Sci. 2011, 16, 3008–3014. [Google Scholar] [CrossRef] [Green Version]
- Pegallapati, A.S.; Ramgopal, M. Effect of heat transfer area distribution on frosting performance of refrigerator evaporator. Int. J. Heat Mass Transf. 2021, 175, 121317. [Google Scholar] [CrossRef]
- Li, X.; Li, Y.; Seem, J.E.; Li, P. Extremum seeking control of cooling tower for self-optimizing efficient operation of chilled water systems. In Proceedings of the 2012 American Control Conference, Montreal, QC, Canada, 27–29 June 2012; pp. 3396–3401. [Google Scholar] [CrossRef]
- Tyagi, V.; Sane, H.; Darbha, S. An extremum seeking algorithm for determining the set point temperature for condensed water in a cooling tower. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 1127–1131. [Google Scholar] [CrossRef]
- Liu, C.; Chuah, Y. A study on an optimal approach temperature control strategy of condensing water temperature for energy saving. Int. J. Refrig. 2011, 34, 816–823. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, S. Supervisory and optimal control of central chiller plants using simplified adaptive models and genetic algorithm. Appl. Energy 2011, 88, 198–211. [Google Scholar] [CrossRef]
- Kie, P.L.T.; Theng, L. Intelligent Control of Heating, Ventilating and Air Conditioning Systems. In Advances in Neuro-Information Processing; Lecture Notes in Computer Science; Springer: Heidelberg/Berlin, Germany, 2009; Volume 5507, pp. 927–934. [Google Scholar]
- Singh, K.; Das, R. Simultaneous optimization of performance parameters and energy consumption in induced draft cooling towers. Chem. Eng. Res. Des. 2017, 123, 1–13. [Google Scholar] [CrossRef]
- Jia, L.; Wei, S.; Liu, J. A review of optimization approaches for controlling water-cooled central cooling systems. Build. Environ. 2021, 203, 108100. [Google Scholar] [CrossRef]
- Nedjah, N.; Mourelle, L.M.; Lizarazu, M.S.D. Mathematical Modeling of Cooling Tower-based Refrigeration Systems for Energy Efficiency Optimization. In Proceedings of the International Conference on Computational Science and Its Applications, Malaga, Spain, 4–7 July 2022. [Google Scholar]
- Nedjah, N.; Mourelle, L.M.; Lizarazu, M.S.D. Mathematical Modeling of Chiller-based Refrigeration Systems for Energy Efficiency Optimization. In Proceedings of the International Conference on Computational Science and Its Applications, Malaga, Spain, 4–7 July 2022. [Google Scholar]
- More, J.J. The Levenberg–Marquardt algorithm: Implementation and theory. Numer. Anal. 1978, 630, 105–116. [Google Scholar]
- YORK. Curva de Surge das Unidades Resfriadoras UR-S2O3, UR-S2O4, UR-S2O5 e RU-S2O6; Technical Report; YORK: Sorocaba, SP, Brazil, 2009. [Google Scholar]
- Alpina. Memória de cálculo das torres de resfriamento TR-2501 e TR-2502; Technical Report; Alpina S/A Indústria e Comércio: São Bernardo do Campo, SP, Brazil, 2013. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning. Addion Wesley 1989, 1989, 36. [Google Scholar]
- Nedjah, N.; Mourelle, L.M. Real World Multi-Objective System Engineering; Intelligent System Engineering Series; Nova Science Publishers: New York, NY, USA, 2005. [Google Scholar]
- Nedjah, N.; de Macedo Mourelle, L. Evolutionary multi-objective optimisation: A survey. Int. J. Bio Inspired Comput. 2015, 7, 1–25. [Google Scholar] [CrossRef]
- Coello, C.A.C.; Pulido, G.T. A Micro-Genetic Algorithm for Multiobjective Optimization. In First International Conference on Evolutionary Multi-Criterion Optimization; Number 1993 in Lecture Notes in Computer Science; Springer: Zurich, Switzerland, 2001; pp. 126–140. [Google Scholar]
- Srinivas, N.; Deb, K. Muiltiobjective Optimization Using Nondominated Sorting in Genetic Algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Horn, J.; Nafpliotis, N.; Goldberg, D. A niched Pareto genetic algorithm for multiobjective optimization. In Proceedings of the First IEEE Conference on Evolutionary Computation, IEEE World Congress on Computational Intelligence, Orlando, FL, USA, 27–29 June 1994; Volume 1, pp. 82–87. [Google Scholar] [CrossRef]
- Knowles, J.D.; Corne, D.W. Approximatting the Non-Dominated Front Using the Pareto Archived Evolution Strategy. Evol. Comput. J. 2000, 8, 149–172. [Google Scholar] [CrossRef] [PubMed]
- Knowles, J.; Corne, D. M-PAES: A memetic algorithm for multiobjective optimization. In Proceedings of the 2000 Congress on Evolutionary Computation, CEC00 (Cat. No.00TH8512), La Jolla, CA, USA, 16–19 July 2000; Volume 1, pp. 325–332. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In Proceedings of the Parallel Problem Solving from Nature VI Conference, Paris, France, 18–20 September 2000; Volume 1917, pp. 849–858. [Google Scholar]
- Veldhuizen, D.A.V.; Lamont, G.B. Multiobjective Optimization with Messy Genetic Algorithms. In Proceedings of the 2000 Symposium on Applied Computing, Como, Italy, 19–21 March 2000; pp. 470–476. [Google Scholar] [CrossRef]
- Laumanns, M.; Thiele, L.; Deb, K.; Zitzler, E. Combining Convergence and Diversity in Evolutionary Multi-objective Optimization. Evol. Comput. 2002, 10, 263–282. [Google Scholar] [CrossRef] [PubMed]
- Zitzler, E.; Thiele, L. An Evolutionary Algorithm for Multiobjective Optimization: The Strength Pareto Approach; Technical Report 43; Computer Engineering and Communication Networks Lab (TIK), Swiss Federal Intitute of Technology (ETH): Zurich, Switzerland, 1998. [Google Scholar]
- Rudolph, G. Evolutionary Search under Partially Ordered Sets; Tech. Rep. CI-67/99; Department of Computer Science/LS11, University of Dortmund: Dortmund, Germany, 1999. [Google Scholar]
- Corne, D.; Knowles, J.; Oates, M. The Pareto Envelope-Based Selection Algorithm for Multi- Objective optimization. In Proceedings of the Sixth International Conference on Parallel Problem Solving from Nature, PPSN-VI, Paris, France, 18–20 September 2000; pp. 839–848. [Google Scholar]
- Kim, M.; Hiroyasu, T.; Miki, M.; Watanabe, S. SPEA2+: Improving the Performance of the Strength Pareto Evolutionary Algorithm 2. In Proceedings of the International Conference on Parallel Problem Solving from Nature 2004, Birmingham, UK, 18–24 September 2004; pp. 742–751. [Google Scholar]
- Guo, D.; Wang, J.; Huang, J.; Han, R.; Song, M. Chaotic-NSGA-II: An Effective Algorithm to Solve Multi-objective Problems. In Proceedings of the International Conference on Intelligent Computing and Integrated Systems (ICISS), Guilin, China, 22–24 October 2010; pp. 20–23. [Google Scholar] [CrossRef]
- Li, M.; Yang, S.; Liu, X.; Wang, K. IPESA-II: Improved Pareto Envelope-Based Selection Algorithm II. Evol. Multi-Criterion Optim. Lect. Notes Comput. Sci. 2013, 7811, 143–155. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. Evol. Comput. IEEE Trans. 2014, 18, 577–601. [Google Scholar] [CrossRef]
- Sulieman, D.; Jourdan, L.; Talbi, E.G. Using multiobjective metaheuristics to solve VRP with uncertain demands. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the Strength Pareto Evolutionary Algorithm; TIK-Report 103; Swiss Federal Institute of Technology: Zürich, Switzerland, 2001. [Google Scholar]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; Wiley and Sons: New York, NY, USA, 2001. [Google Scholar]
- Goldberg, D.E. Sizing Populations for Serial and Parallel Genetic Algorithms. In Proceedings of the Third International Conference on Genetic Algorithms, Fairfax, WV, USA, 4–7 June 1989; Schaffer, J.D., Ed.; Morgan Kaufmann: San Mateo, CA, USA, 1989; pp. 70–79. [Google Scholar]
- YORK. Print-out de seleção das Unidades Resfriadoras UR-S2O3, UR-S2O4, UR-S2O5 e UR-S2O6; Technical Report; YORK: Sorocaba, SP, Brazil, 2006. [Google Scholar]
- Sayyaadi, H.; Nejatolahi, M. Multi-objective optimization of a cooling tower assisted vapor compression refrigeration system. Int. J. Refrig. 2011, 34, 243–256. [Google Scholar] [CrossRef]
- INPE. Dados Observacionais do Centro de Previsão de Tempo e Estudos Climáticos. 2014. Available online: http://bancodedados.cptec.inpe.br (accessed on 26 June 2022).
- Lizarazu, M.S.D. Otimização Multiobjetivo Aplicada à Efciência Energética de Torres de Resfriamento. Master’s Thesis, Universidade do Estado do Rio de Janeiro, Rio de Janeiro, Brazil, 1996. Available online: https://www.pel.uerj.br/bancodissertacoes/Dissertacao_Marcelo_Lizarazu.pdf (accessed on 26 June 2022).
- Popov, A. Combined Matlab—C Implementation of SPEA2; MathWorks: Natick, MA, USA, 2007. [Google Scholar]
- Heris, S.M.K. A Version of the NSGA-II in Matlab. 2010. Available online: http://delta.cs.cinvestav.mx/~ccoello/EMOO/EMOOsoftware.html (accessed on 26 June 2022).
- Chen, L. SGALAB 1003 Beta 5.0.0.8 (Matrix Variable Inputs): Genetic Algorithm Toolbox for Multi-objective Problems with Fuzzy Logic Controller Applications; MathWorks: Natick, MA, USA, 2004. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Value | Value | Value | ||||
|---|---|---|---|---|---|---|---|
| #Chillers | #Pumps | #Cells (Theoretical) | #Cells (Real) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | ||
| 1 | 1 | 505.00 | 252.50 | 168.30 | - | - | 550.00 | 280.00 | 170.00 | - | - |
| 2 | 2 | 1010.0 | 505.00 | 336.70 | 252.50 | - | - | 485.00 | 330.00 | - | - |
| Point | #Chillers | (kg/s) | (°C) | (°C) | (kg/s) | (°C) | (°C) |
|---|---|---|---|---|---|---|---|
| 8 | 2 | 87.02 | 29.68 | 22.94 | 130.53 | 10.41 | 6.01 |
| 16 | 2 | 70.71 | 29.40 | 24.49 | 106.07 | 11.16 | 6.27 |
| 26 | 1 | 51.65 | 27.94 | 23.31 | 154.96 | 9.72 | 6.05 |
| Point | SPEA2—50 Iterations | SPEA2—90 s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (Hz) | (°C) | (kW) | ec (%) | (Hz) | (°C) | (kW) | ec (%) | |||
| 8 | 44.28 | 6.27 | 0.5192 | 857.44 | 9.55 | 43.48 | 6.25 | 0.5178 | 858.30 | 9.45 |
| 16 | 60.00 | 6.91 | 0.7452 | 934.74 | 11.34 | 59.97 | 6.91 | 0.7451 | 935.46 | 11.27 |
| 26 | 58.22 | 6.80 | 0.7359 | 371.46 | 16.03 | 59.23 | 6.83 | 0.7402 | 372.43 | 15.79 |
| Point | SPEA2—50 Iterations | SPEA2—90 s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (Hz) | (°C) | (°C) | (°C) | (°C) | (Hz) | (°C) | (°C) | (°C) | (°C) | |
| 8 | 44.28 | 6.27 | 26.18 | 3.24 | 30.91 | 43.48 | 6.25 | 26.19 | 3.25 | 30.94 |
| 16 | 60.00 | 6.91 | 25.74 | 1.25 | 31.80 | 59.97 | 6.91 | 25.74 | 1.25 | 31.81 |
| 26 | 58.22 | 6.80 | 24.53 | 1.22 | 28.71 | 59.23 | 6.83 | 24.51 | 1.20 | 28.68 |
| Point | NSGA-II—50 Iterations | NSGA-II—90 s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (Hz) | (°C) | (kW) | (%) | (Hz) | (°C) | (kW) | (%) | |||
| 8 | 44.46 | 6.26 | 0.5196 | 859.03 | 9.37 | 46.04 | 6.28 | 0.5223 | 859.98 | 9.26 |
| 16 | 59.88 | 6.95 | 0.7448 | 928.58 | 11.96 | 59.78 | 6.93 | 0.7444 | 930.36 | 11.78 |
| 26 | 56.87 | 6.71 | 0.7301 | 372.54 | 15.76 | 57.37 | 6.73 | 0.7323 | 373.09 | 15.62 |
| Point | NSGA-II—50 Iterations | NSGA-II—90 s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (Hz) | (°C) | (°C) | (°C) | (°C) | (Hz) | (°C) | (°C) | (°C) | (°C) | |
| 8 | 44.46 | 6.26 | 26.18 | 3.24 | 30.92 | 46.04 | 6.28 | 26.16 | 3.22 | 30.89 |
| 16 | 59.88 | 6.95 | 25.74 | 1.25 | 31.76 | 59.78 | 6.93 | 25.74 | 1.25 | 31.78 |
| 26 | 56.87 | 6.71 | 24.56 | 1.25 | 28.79 | 57.37 | 6.73 | 24.55 | 1.24 | 28.78 |
| Point | Micro-GA—50 Iterations | Micro-GA—90 s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (Hz) | (°C) | (kW) | (%) | (Hz) | (°C) | (kW) | (%) | |||
| 8 | 43.50 | 6.26 | 0.5179 | 857.17 | 9.58 | 43.54 | 6.20 | 0.5179 | 865.90 | 8.58 |
| 16 | 56.67 | 6.77 | 0.7322 | 946.05 | 10.21 | 53.24 | 6.81 | 0.7181 | 929.14 | 11.90 |
| 26 | 57.29 | 6.74 | 0.7320 | 372.23 | 15.83 | 58.30 | 6.65 | 0.7363 | 378.59 | 14.27 |
| Point | Micro-GA—50 Iterations | Micro-GA—90 s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (Hz) | (°C) | (°C) | (°C) | (°C) | (Hz) | (°C) | (°C) | (°C) | (°C) | |
| 8 | 43.50 | 6.26 | 26.19 | 3.25 | 30.93 | 43.54 | 6.20 | 26.19 | 3.25 | 30.98 |
| 16 | 56.67 | 6.77 | 25.81 | 1.32 | 32.03 | 53.24 | 6.81 | 25.87 | 1.38 | 32.05 |
| 26 | 57.29 | 6.74 | 24.55 | 1.24 | 28.77 | 58.30 | 6.65 | 24.53 | 1.22 | 28.80 |
| Metric | After 50 Iterations | After 90 s | ||||
|---|---|---|---|---|---|---|
| SPEA2 | NSGA-II | Micro-GA | SPEA2 | NSGA-II | Micro-GA | |
| (%) | 8.48 | 8.28 | 8.43 | 8.50 | 8.32 | 8.43 |
| (%) | −3.72 | −4.09 | −4.64 | −3.72 | −4.26 | −3.66 |
| (%) | 26.07 | 25.36 | 25.67 | 25.27 | 26.16 | 25.46 |
| 0.6232 | 0.6219 | 0.6183 | 0.6247 | 0.6200 | 0.6159 | |
| 0.4843 | 0.4826 | 0.4818 | 0.4833 | 0.4818 | 0.4816 | |
| 0.8474 | 0.8470 | 0.8350 | 0.8473 | 0.8466 | 0.8285 | |
| Time (s) | 15.70 | 69.82 | 77.92 | 90 | 90 | 90 |
| #Iterations | 50 | 50 | 50 | 548 | 63 | 78 |
| Metric | After 50 Iterations | After 90 s | ||||
|---|---|---|---|---|---|---|
| SPEA2 | NSGA-II | Micro-GA | SPEA2 | NSGA-II | Micro-GA | |
| (%) | 8.48 | 8.28 | 8.43 | 8.50 | 8.32 | 8.43 |
| (%) | 62.32 | 62.19 | 61.83 | 62.47 | 62.00 | 61.59 |
| (%) | 5.29 | 5.42 | 5.78 | 5.14 | 5.61 | 6.02 |
| EER | 1.60 | 1.53 | 1.46 | 1.65 | 1.48 | 1.40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nedjah, N.; de Macedo Mourelle, L.; Lizarazu, M.S.D. Evolutionary Multi-Objective Optimization Applied to Industrial Refrigeration Systems for Energy Efficiency. Energies 2022, 15, 5575. https://0-doi-org.brum.beds.ac.uk/10.3390/en15155575
Nedjah N, de Macedo Mourelle L, Lizarazu MSD. Evolutionary Multi-Objective Optimization Applied to Industrial Refrigeration Systems for Energy Efficiency. Energies. 2022; 15(15):5575. https://0-doi-org.brum.beds.ac.uk/10.3390/en15155575
Chicago/Turabian StyleNedjah, Nadia, Luiza de Macedo Mourelle, and Marcelo Silveira Dantas Lizarazu. 2022. "Evolutionary Multi-Objective Optimization Applied to Industrial Refrigeration Systems for Energy Efficiency" Energies 15, no. 15: 5575. https://0-doi-org.brum.beds.ac.uk/10.3390/en15155575