
Analysis of the Characteristics of Stator Circulating Current Inside Parallel Branches in DFIGs Considering Static and Dynamic Air-Gap Eccentricity
 ,
,
Abstract
:1. Introduction
2. Theoretical Analysis
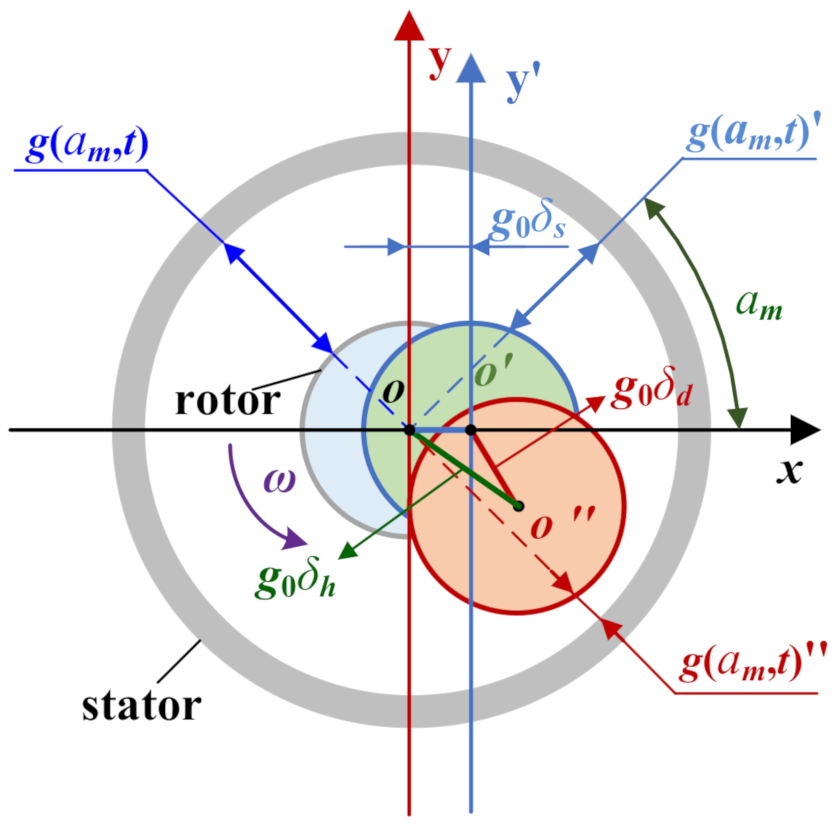
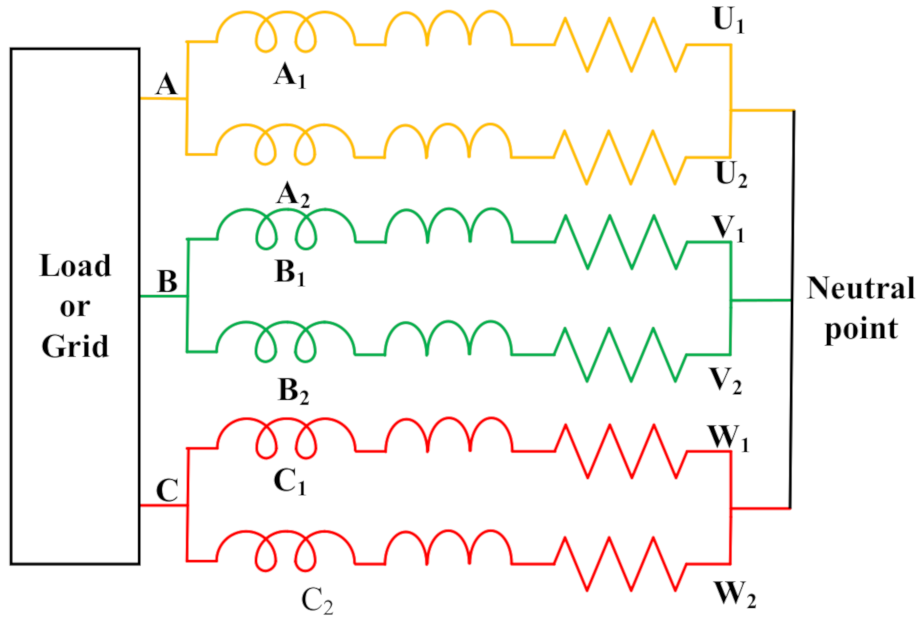
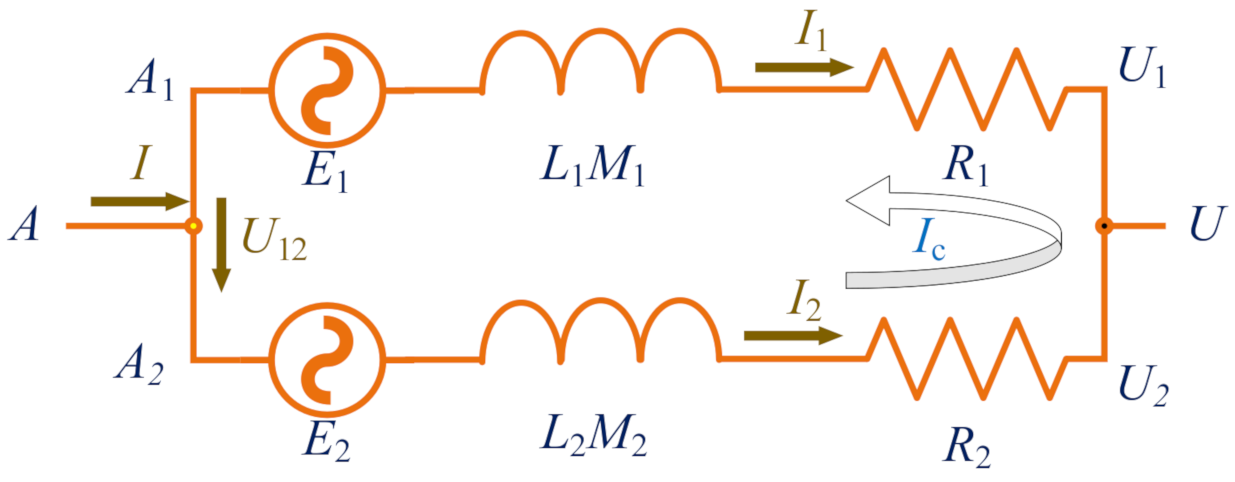
Theoretical Model
- (1)
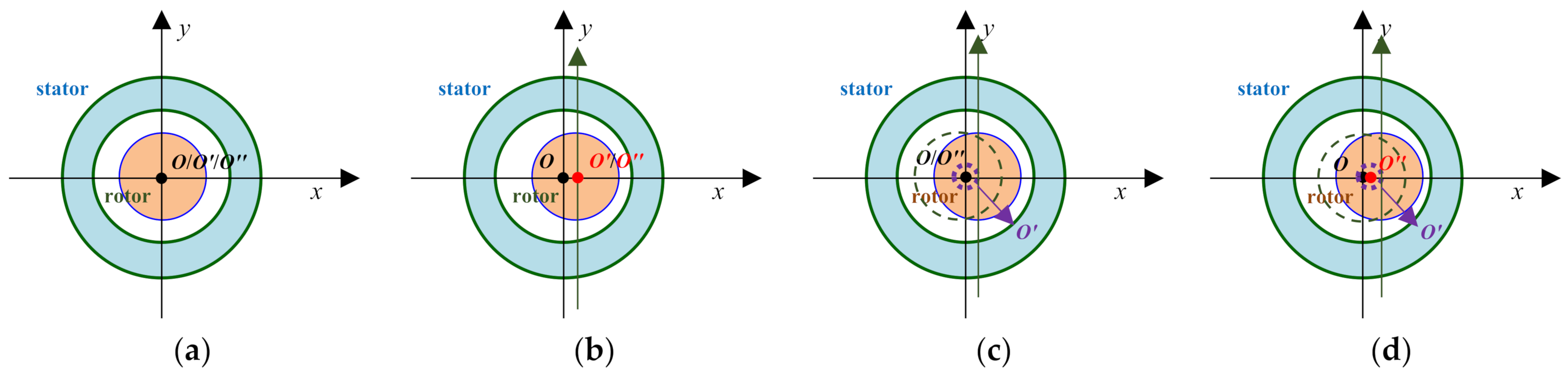
- O, O′, and O″ coincide when there is no eccentricity;
- (2)
- In RSAGE, O′ coincides with O″ but not with O;
- (3)
- In RDAGE, O and O″ coincide but not with O′;
- (4)
- In RHAGE, O, O′, and O″ do not coincide.

3. FEA and Experiment Validation
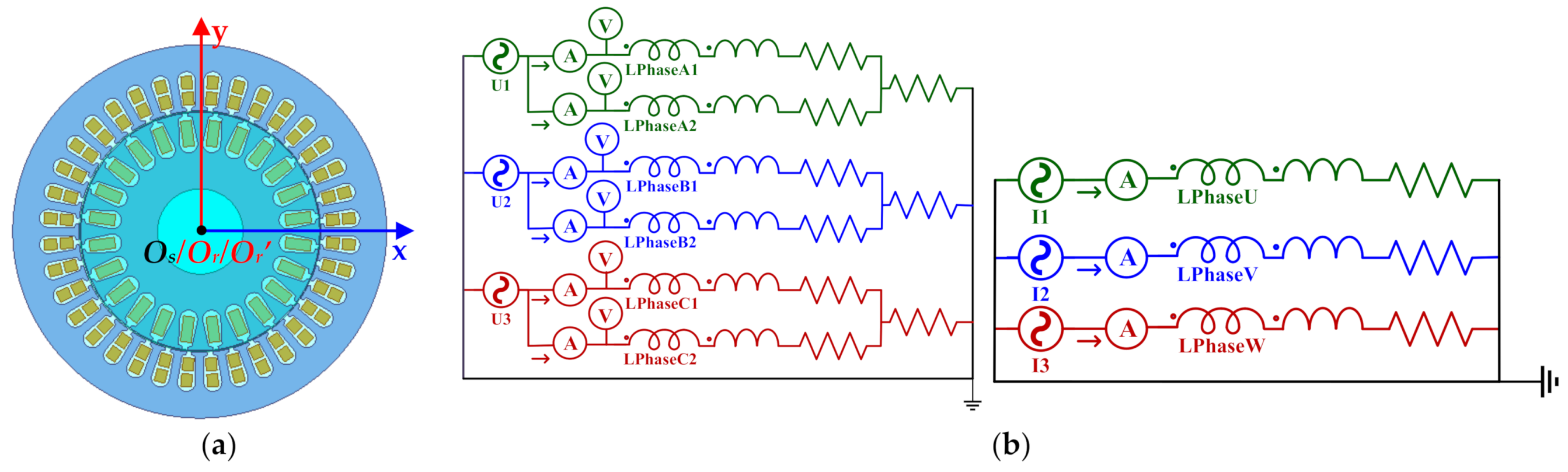
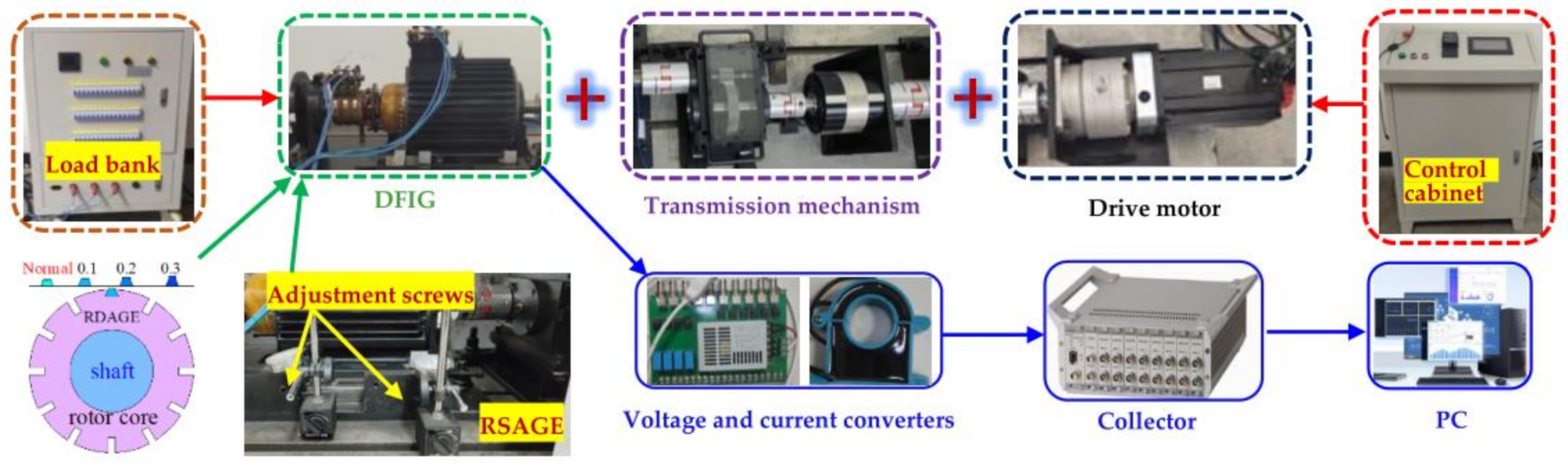
3.1. FEA and Experiment Setup
- (1)
- Common normal condition;
- (2)
- RSAGE of 0.1, 0.2, and 0.3 mm;
- (3)
- RDAGE of 0.1, 0.2, and 0.3 mm;
- (4)
- RHAGE of 0.1, 0.2, and 0.3 mm.
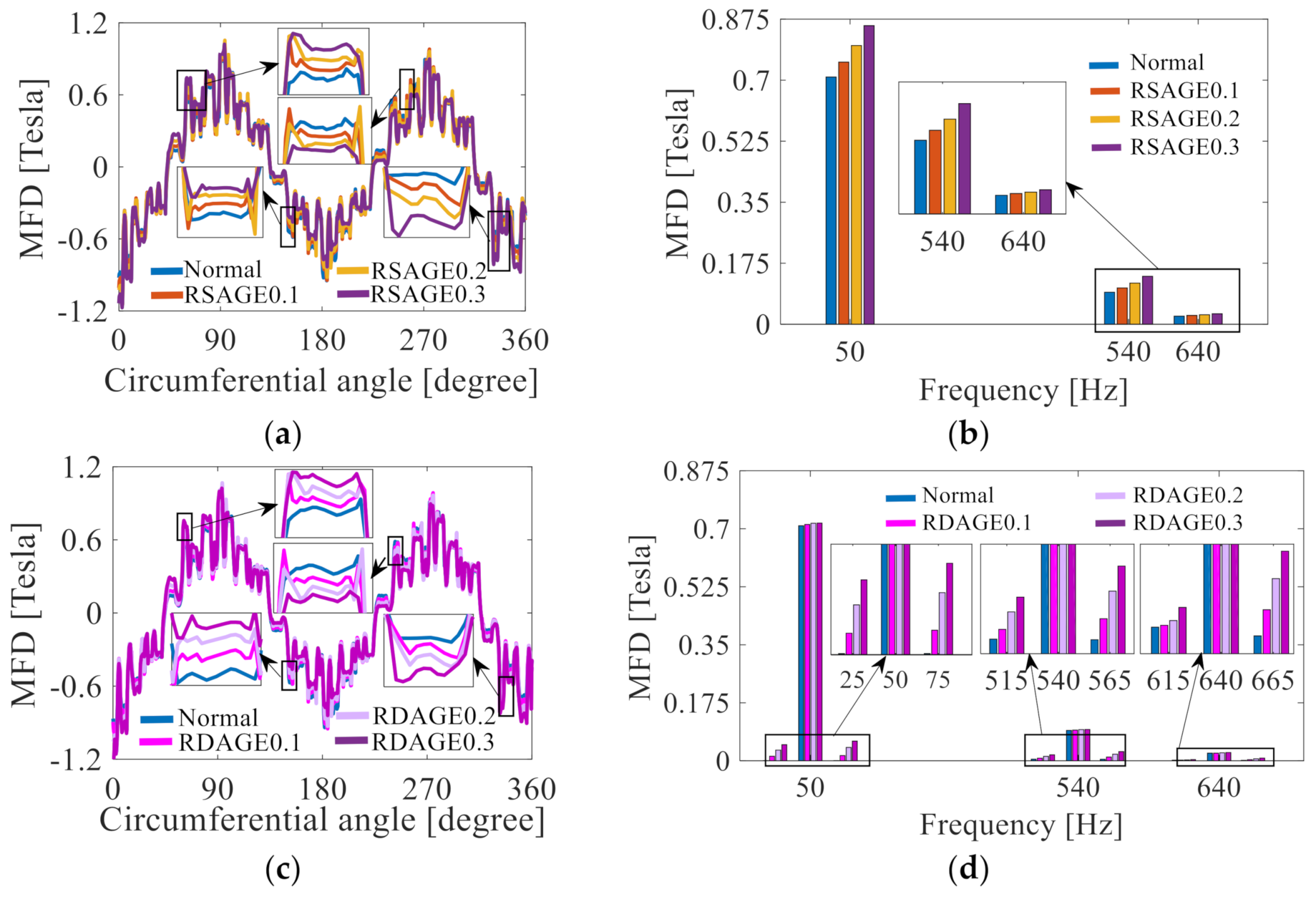
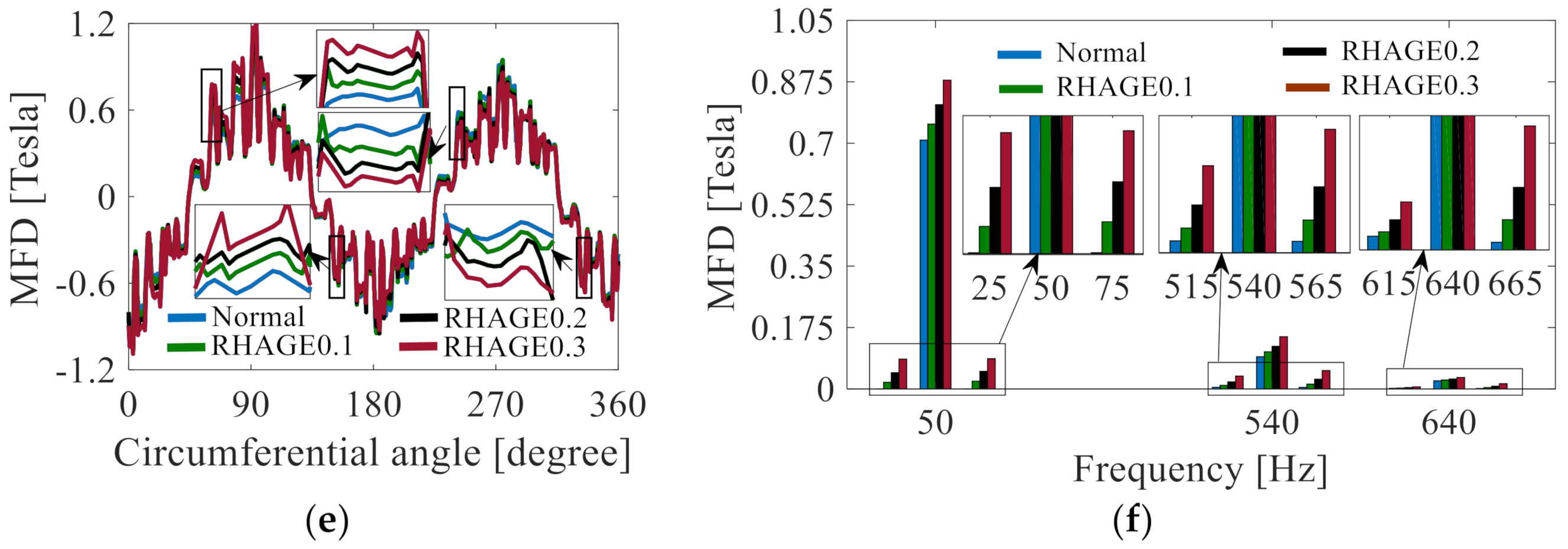
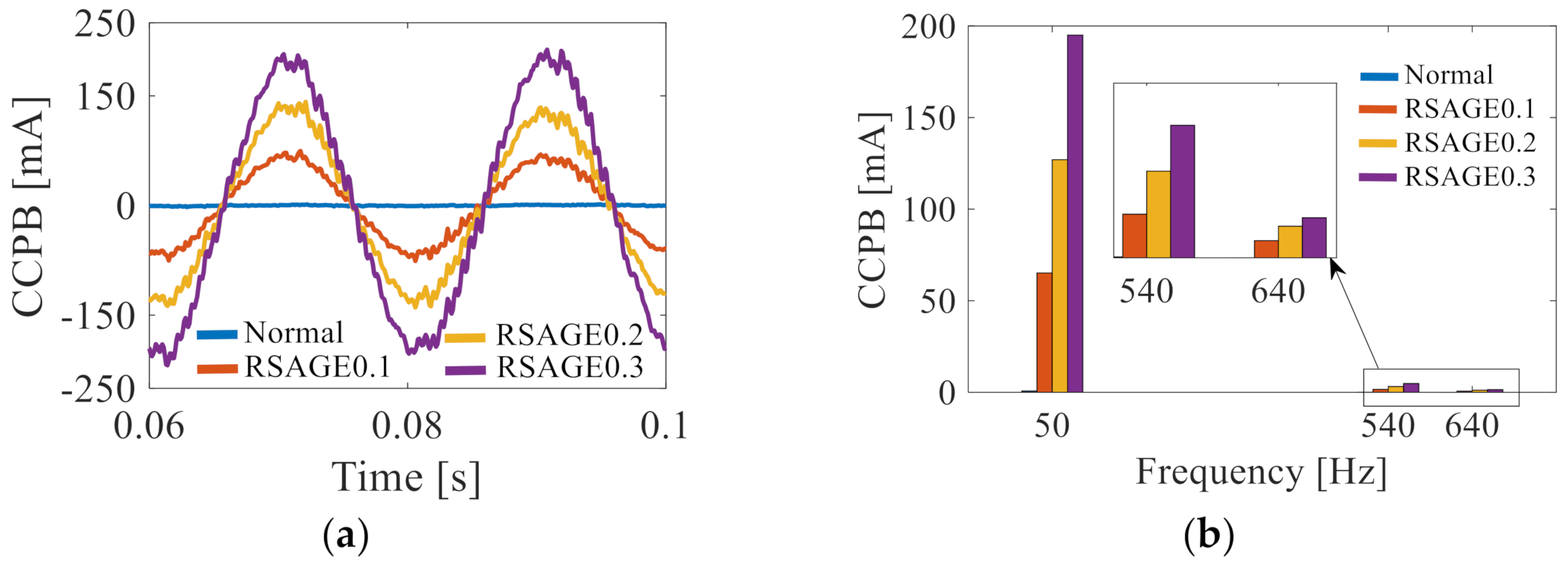
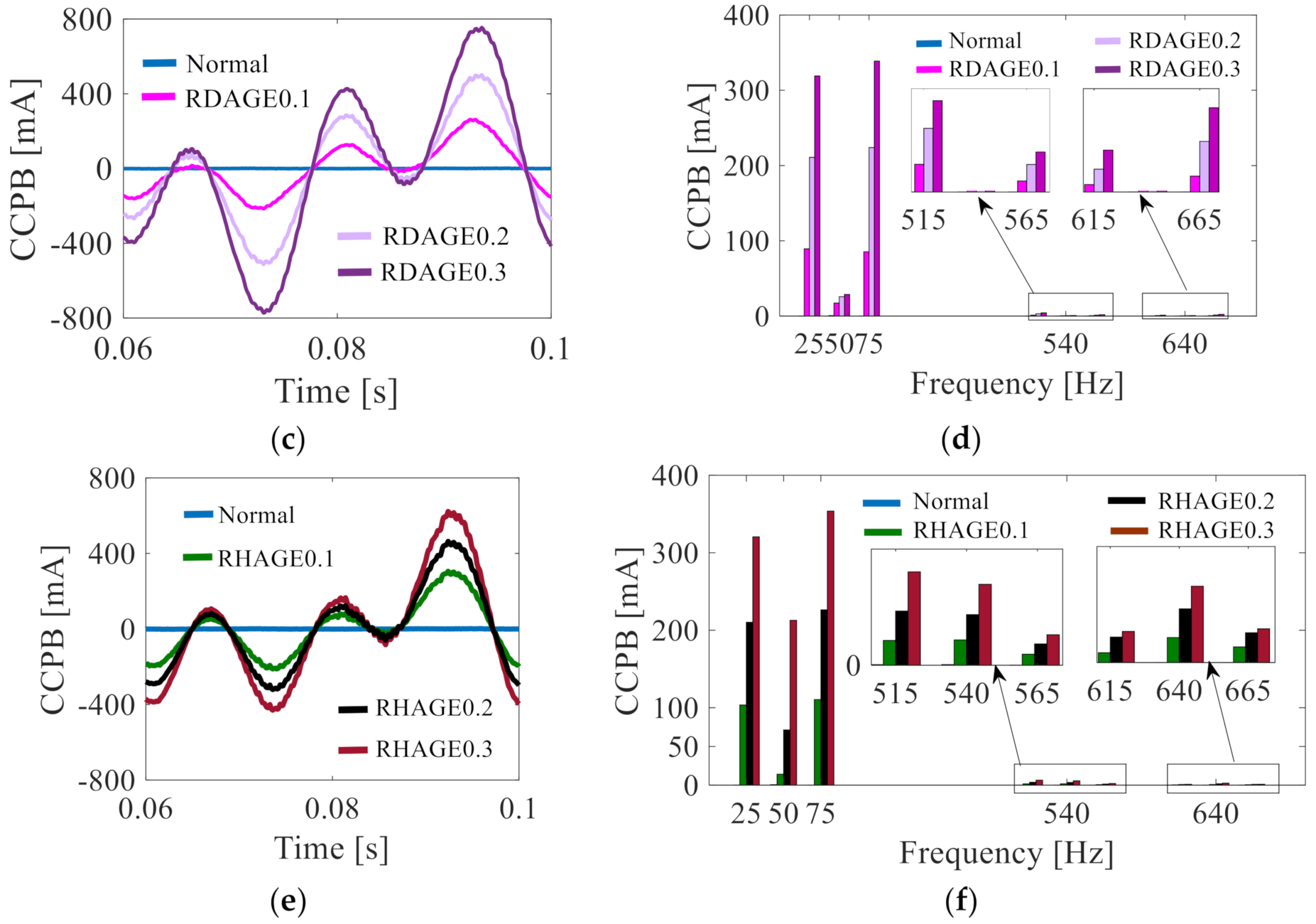
3.2. FEA Results’ Discussion
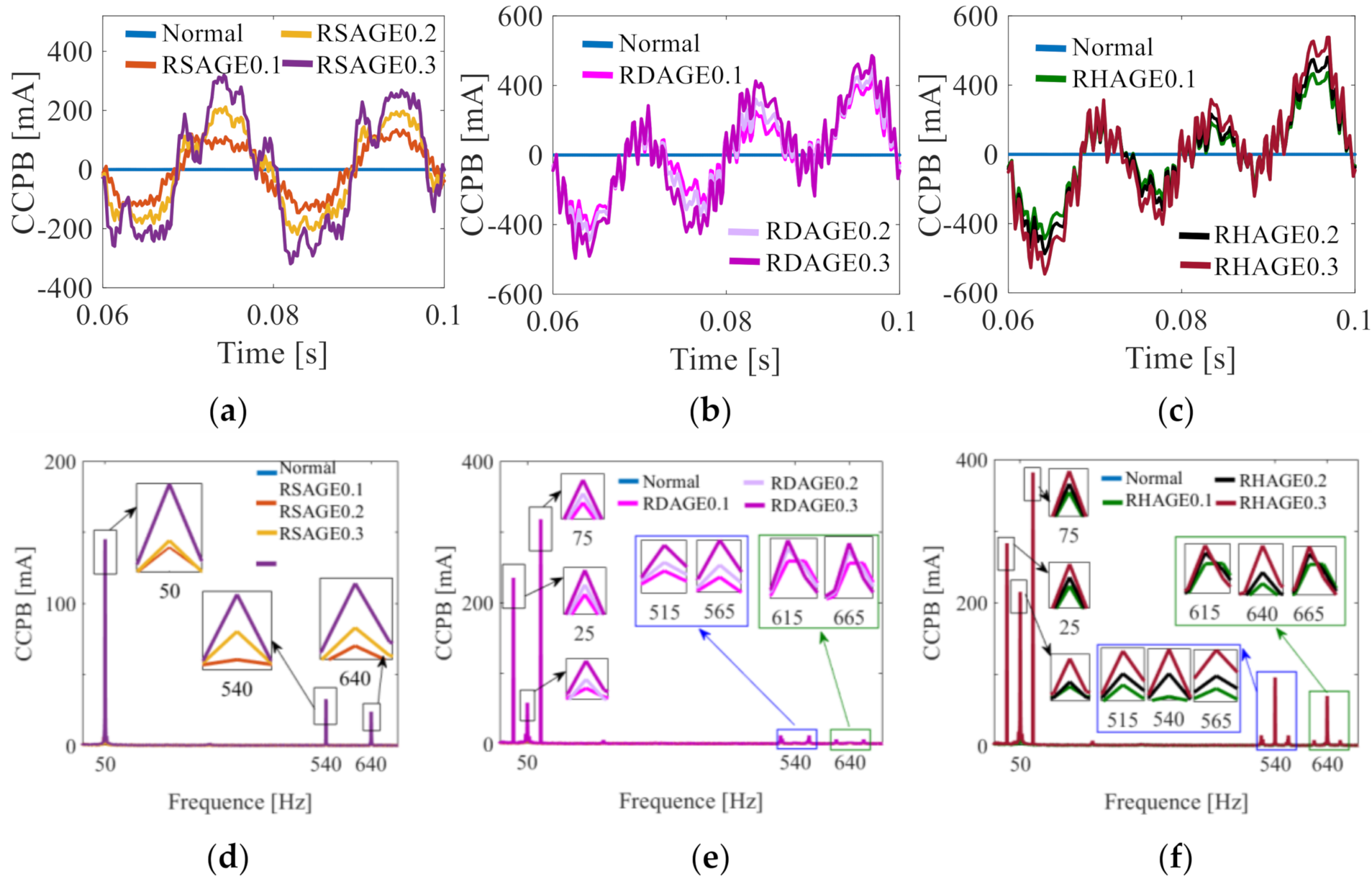
3.3. Experiment Results’ Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DFIG | Doubly fed induction generator |
| RAGE | Radial air-gap eccentricity |
| RSAGE | Radial static air-gap eccentricity |
| RDAGE | Radial dynamic air-gap eccentricity |
| RHAGE | Radial hybrid air-gap eccentricity |
| CCPB | Circulating current inside parallel branches |
| MFD | Magnetic flux density |
| MMF | Magnetomotive force |
| PPUA | Permeance per unit area |
| FEA | Finite element analysis |
References
- Energy-Wind Energy. New Wind Energy Research from Rzeszow University of Technology Outlined (Taxonomic Analysis of the Diversity in the Level of Wind Energy Development in European Union Countries). Energy Weekly News 2020, 876. [Google Scholar]
- Reja, R.K.; Amin, R.; Tasneem, Z.; Ali, M.F.; Islam, M.R.; Saha, D.K.; Badal, F.R.; Ahamed, M.H.; Moyeen, S.L.; Das, S.K. A review of the evaluation of urban wind resources: Challenges and per-spectives. Energy Build. 2022, 257, 111781. [Google Scholar] [CrossRef]
- Dinh, Q.V.; Doan, Q.V.; Ngo-Duc, T.; Duc, N.D. Offshore wind resource in the context of global climate change over a tropical area. Appl. Energy 2022, 308, 118369. [Google Scholar] [CrossRef]
- Xiahou, K.; Lin, X.; Liu, Y.; Wu, Q.H. Robust Rotor-Current Sensor less Control of Doubly Fed Induction Genera-tors. IEEE Trans. Energy Convers. 2018, 33, 897–899. [Google Scholar] [CrossRef]
- Han, J.; Liu, Z.; Liang, N. Nonlinear Adaptive Robust Control Strategy of Doubly Fed Induction Generator Based on Virtual Synchronous Generator. IEEE Access 2020, 8, 159887–159896. [Google Scholar] [CrossRef]
- He, Y.L.; Zhang, Z.J.; Tao, W.Q.; Wang, X.L.; Gerada, D.; Gerada, C.; Gao, P. A New External Search Coil Based Method to Detect Detailed Static Air-Gap Eccentricity Position in Nonsalient Pole Synchronous Generators. IEEE Trans. Ind. Electron. 2021, 68, 7535–7544. [Google Scholar] [CrossRef]
- Bruzzese, C.; Joksimovic, G. Harmonic Signatures of Static Eccentricities in the Stator Voltages and in the Rotor Current of No-Load Salient-Pole Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1606–1624. [Google Scholar] [CrossRef]
- He, Y.L.; Xu, M.X.; Xiong, J.; Sun, Y.X.; Wang, X.L.; Gerada, D.; Vakil, G. Effect of 3D Unidirectional and Hybrid SAGE on Electromagnetic Torque Fluctuation Characteristics in Synchronous Generator. IEEE Access 2019, 7, 100813–100823. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A New Approach to Fault Diagnostics for Permanent Magnet Synchronous Machines Using Electromagnetic Signature Analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Attestog, S.; Khang, H.V.; Robbersmyr, K.G. Detecting Eccentricity and Demagnetization Fault of Permanent Magnet Synchronous Generators in Transient State. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Dorrell, D.G.; Salah, A.; Guo, Y. The Detection and Suppression of Unbalanced Magnetic Pull in Wound Rotor Induction Motors Using Pole-Specific Search Coils and Auxiliary Windings. IEEE Trans. Ind. Appl. 2017, 53, 2066–2076. [Google Scholar] [CrossRef]
- Ehya, H.; Nysveen, A.; Nilssen, R.; Liu, Y. Static and dynamic eccentricity fault diagnosis of large salient pole synchronous generators by means of external magnetic field. IET Electr. Power Appl. 2021, 15, 890–902. [Google Scholar] [CrossRef]
- Li, J.; Wang, X.-B.; Luo, Z.; Chen, H.; Yang, Z.-X. Diagnosis of the Mixed Eccentricity Fault in Interior Permanent Magnet Synchronous Motors based on the Open-Circuit External Field. In Proceedings of the 2022 5th International Conference on Energy, Electrical and Power Engineering (CEEPE), Chongqing, China, 22–24 April 2022; pp. 484–489. [Google Scholar]
- Wan, S.; He, Y. Investigation on stator and rotor vibration characteristics of turbo-generator under air gap eccentricity fault. Trans. Can. Soc. Mech. Eng. 2011, 35, 161–176. [Google Scholar] [CrossRef]
- Zarko, D.; Ban, D.; Vazdar, I.; Jarica, V. Calculation of Unbalanced Magnetic Pull in a Salient-Pole Synchronous Generator Using Finite-Element Method and Measured Shaft Orbit. IEEE Trans. Ind. Electron. 2012, 59, 2536–2549. [Google Scholar] [CrossRef]
- He, Y.L.; Sun, Y.X.; Xu, M.X.; Wang, X.L.; Wu, Y.C.; Vakil, G.; Gerada, D.; Gerada, C. Rotor UMP characteristics and vibration properties in synchronous generator due to 3D static air-gap eccentricity faults. IET Electr. Power Appl. 2020, 14, 961–971. [Google Scholar] [CrossRef]
- He, Y.-L.; Wang, Y.; Jiang, H.-C.; Gao, P.; Yuan, X.-H.; Gerada, D.; Liu, X.-Y. A Novel Universal Model Considering SAGE for MFD-Based Faulty Property Analysis Under RISC in Synchronous Generators. IEEE Trans. Ind. Electron. 2022, 69, 7415–7427. [Google Scholar] [CrossRef]
- Andriamalala, R.N.; Razik, H.; Baghli, L.; Sargos, F. Eccentricity Fault Diagnosis of a Dual-Stator Winding Induction Machine Drive Considering the Slotting Effects. IEEE Trans. Ind. Electron. 2008, 55, 4238–4251. [Google Scholar] [CrossRef]
- Faiz, J.; Ebrahimi, B.M.; Akin, B.; Toliyat, H.A. Comprehensive Eccentricity Fault Diagnosis in Induction Motors Using Finite Element Method. IEEE Trans. Magn. 2009, 45, 1764–1767. [Google Scholar] [CrossRef]
- Bruzzese, C. Diagnosis of Eccentric Rotor in Synchronous Machines by Analysis of Split-Phase Currents—Part II: Experimental Analysis. IEEE Trans. Ind. Electron. 2014, 61, 4206–4216. [Google Scholar] [CrossRef]
- Bruzzese, C.; Trentini, F.; Santini, E.; Joksimović, G. Sequence Circuit-Based Modeling of a Doubly Fed Induction Wind Generator for Eccentricity Diagnosis by Split-Phase Current Signature Analysis. In Proceedings of the 2018 5th International Symposium on Environment-Friendly Energies and Applications (EFEA), Rome, Italy, 24–26 September 2018; pp. 1–8. [Google Scholar]
- Gong, X.; Qiao, W. Current-Based Mechanical Fault Detection for Direct-Drive Wind Turbines via Synchronous Sampling and Impulse Detection. IEEE Trans. Ind. Electron. 2015, 62, 1693–1702. [Google Scholar] [CrossRef]
- Salah, A.A.; Dorrell, D.G. Operating Induction Machine in DFIG Mode Including Rotor Asymmetry. In Proceedings of the 2019 Southern African Universities Power Engineering Conference/Robotics and Mechatronics/Pattern Recognition Association of South Africa (SAUPEC/RobMech/PRASA), Bloemfontein, South Africa, 28–30 January 2019; pp. 469–474. [Google Scholar]
- Hamatwi, E.; Barendse, P.; Khan, A. Development of a Test Rig for Fault Studies on a scaled-down DFIG. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 3805–3812. [Google Scholar]
- Foggia, A.; Torlay, J.-E.; Corenwinder, C.; Audoli, A.; Herigault, J. Circulating current analysis in the parallel-connected windings of synchronous generators under abnormal operating conditions. In Proceedings of the IEEE International Electric Machines and Drives Conference’ IEMDC’99’ Proceedings (Cat. No.99EX272), Seattle, WA, USA, 9–12 May 1999; pp. 634–636. [Google Scholar]
- Rodriguez, P.; Rzeszucinski, P.; Sulowicz, M.; Disselnkoetter, R.; Ahrend, U.; Pinto, C.T.; Ottewill, J.R.; Wildermuth, S. Stator circulating currents as media of fault detection in synchronous motors. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 207–214. [Google Scholar]
- Shuting, W.; Yuling, H. Analysis on stator circulating current characteristics of turbo-generator under eccentric faults. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 2062–2067. [Google Scholar]
- Mafruddin, M.M.; Suwarno, S.; AbuSiada, A. Finite Element Simulation of a 126 MW Salient Pole Synchronous Generator with Rotor Eccentricity. In Proceedings of the 2019 2nd International Conference on High Voltage Engineering and Power Systems (ICH-VEPS), Denpasar, Indonesia, 1–4 October 2019; pp. 1–96. [Google Scholar]
- Xu, M.; He, Y.; Dai, D.; Liu, X.; Zheng, W.; Zhang, W. Effect of Rotor Interturn Short circuit degree and position on Stator Circulating Current inside Parallel Branches in Generators. In Proceedings of the 2021 IEEE 4th Student Conference on Electric Machines and Systems (SCEMS), Huzhou, China, 1–3 December 2021; pp. 1–7. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Fault Type | Detection Object | Research Method |
|---|---|---|---|
| [21] | eccentricity | DFIG | split-phase current |
| [24] | eccentricity and short circuit | DFIG | stator current |
| [25] | eccentricity and short circuit | synchronous generator | CCPB |
| [26] | RSAGE and RDAGE | synchronous motor | CCPB |
| [27] | RHAGE | turbo-generator | CCPB |
| [28] | RSAGE | synchronous generator | CCPB |
| [29] | short circuit | synchronous generator | CCPB |
| This work | RHAGE | DFIG | CCPB |
| Cases | Amplitude | Number of Pole Pairs | Freq. | Impact Factor |
|---|---|---|---|---|
| Normal | - | - | - | - |
| RSAGE | 2qwckw1τlfΛ0δsF0 | p ± 1 | ω1 | q, wc, kw1, τ, l, f, F0, Λ0, δs |
| 2qwckw1τlfΛ0δsFv | v ± 1 | ω1 | q, wc, kw1, τ, l, f, Fv, Λ0, δs | |
| 2qwckw1τlfΛ0δsFμ | μ ± 1 | ωμ | q, wc, kw1, τ, l, f, Fμ, Λ0, δs | |
| RDAGE | 2qwckw1τlfΛ0δdF0 | p ± 1 | ω1± ωr | q, wc, kw1, τ, l, f, F0, Λ0, δd |
| 2qwckw1τlfΛ0δdFv | v ± 1 | ω1± ωr | q, wc, kw1, τ, l, f, Fv, Λ0, δd | |
| 2qwckw1τlfΛ0δdFμ | μ ± 1 | ωµ ± ωr | q, wc, kw1, τ, l, f, Fμ, Λ0, δd | |
| RHAGE | 2qwckw1τlfΛ0δsF0 | p ± 1 | ω1 | q, wc, kw1, τ, l, f, F0, Λ0, δs |
| 2qwckw1τlfΛ0δdF0 | ω1± ωr | q, wc, kw1, τ, l, f, F0, Λ0, δd | ||
| 2qwckw1τlfΛ0δsFv | v ± 1 | ω1 | q, wc, kw1, τ, l, f, Fv, Λ0, δs | |
| 2qwckw1τlfΛ0δs Fv | ω1± ωr | q, wc, kw1, τ, l, f, Fv, Λ0, δd | ||
| 2qwckw1τlfΛ0δdFμ | μ ± 1 | ωμ | q, wc, kw1, τ, l, f, Fμ, Λ0, δs | |
| 2qwckw1τlfΛ0δdFμ | ωµ ± ωr | q, wc, kw1, τ, l, f, Fμ, Λ0, δd |
| Condition | MFD | CCPB | Trend |
|---|---|---|---|
| normal | f1, fμ | f1, fμ | - |
| RSAGE0.1 RSAGE0.2 RSAGE0.3 | f1, fμ | f1, fμ | increase |
| RDAGE0.1 RDAGE0.2 RDAGE0.3 | f1, fμ, f1 ± fr, fμ ± fr | f1, fμ, f1 ± fr, fμ ± fr | increase |
| RHAGE0.1 RHAGE0.2 RHAGE0.3 | f1, fμ, f1 ± fr, fμ ± fr | f1, fμ, f1 ± fr, fμ ± fr | increase |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated capacity | 5.5 kW | Rated rotating speed | nr = 1500 rpm |
| Stator core length | l = 155 mm | Stator external diameter | 210 mm |
| Parallel branches | ɑ = 2 | Rotor external diameter | 134 mm |
| air-gap length | 1 mm | Power factor | cos φ = 0.8 |
| Rated voltage | 380 V | Stator slots | Z1 = 36 |
| Pole pairs | p = 2 | Rotor slots | Z2 = 24 |
| Type | Freq. | Normal (×10−3) | RSAGE (×10−3) | RDAGE (×10−3) | RHAGE (×10−3) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | |||
| f1 | 50 | 709.10 | 751.80 | 799.4 | 856.45 | 697.20 | 716.45 | 717.15 | 754.60 | 809.90 | 879.55 |
| fu | 540 | 91.80 | 104.23 | 118.12 | 137.55 | 92.64 | 94.39 | 94.60 | 106.05 | 121.59 | 149.06 |
| 640 | 23.25 | 25.452 | 27.21 | 30.14 | 23.19 | 24.20 | 25.19 | 25.71 | 28.50 | 32.99 | |
| f1±fr | 25 | - | - | - | - | 13.88 | 32.41 | 48.75 | 19.13 | 46.65 | 85.12 |
| 75 | - | - | - | - | 15.86 | 40.39 | 59.57 | 22.39 | 50.54 | 86.45 | |
| fu ± fr | 515 | - | - | - | - | 8.05 | 13.53 | 18.18 | 10.47 | 20.27 | 36.99 |
| 564 | - | - | - | - | 11.39 | 20.06 | 27.93 | 13.87 | 28.02 | 52.46 | |
| 615 | - | - | - | - | 2.32 | 2.71 | 3.78 | 2.71 | 4.13 | 6.24 | |
| 664 | - | - | - | - | 3.59 | 6.11 | 8.34 | 4.13 | 7.96 | 15.22 | |
| Trend | - | - | increase | increase | increase | ||||||
| Type | Freq. | Normal | RSAGE (×10−3) | RDAGE (×10−3) | RHAGE (×10−3) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | |||
| f1 | 50 | - | 65.15 | 127.01 | 195.01 | - | - | - | 14.16 | 71.34 | 212.8 |
| fu | 540 | - | 1.582 | 3.134 | 4.789 | - | - | - | 1.754 | 3.511 | 5.616 |
| 640 | - | 0.063 | 1.148 | 1.453 | - | - | - | 0.933 | 1.86 | 2.591 | |
| f1 ± fr | 25 | - | - | - | - | 89.38 | 210.9 | 319 | 103.5 | 210.3 | 320.5 |
| 75 | - | - | - | - | 85.45 | 223.9 | 338.7 | 110.5 | 226.3 | 353.8 | |
| fu ± fr | 515 | - | - | - | - | 1.337 | 3.011 | 4.302 | 1.717 | 3.758 | 6.481 |
| 565 | - | - | - | - | 0.561 | 1.329 | 1.91 | 0.763 | 1.479 | 2.113 | |
| 615 | - | - | - | - | 0.331 | 0.736 | 1.244 | 0.444 | 0.948 | 1.132 | |
| 665 | - | - | - | - | 0.553 | 1.474 | 2.366 | 0.632 | 1.088 | 1.216 | |
| Trend | - | - | increase | increase | increase | ||||||
| Type | Freq. | Normal | RSAGE (×10−3) | RDAGE (×10−3) | RHAGE (×10−3) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | 0.1 | 0.2 | 0.3 | |||
| f1 | 50 | - | 229.2 | 281.4 | 725 | - | - | - | 180.6 | 242 | 536.5 |
| fu | 540 | - | 11.92 | 77.23 | 163 | - | - | - | 23.13 | 127.6 | 238 |
| 640 | - | 30.87 | 56.53 | 118.7 | - | - | - | 59.88 | 93.4 | 173.4 | |
| f1± fr | 25 | - | - | - | - | 387.6 | 467.3 | 586.9 | 465.9 | 561.8 | 706.9 |
| 75 | - | - | - | - | 530.9 | 636.2 | 794.2 | 637.7 | 764.3 | 954.2 | |
| fu ± fr | 515 | - | - | - | - | 10.54 | 16.77 | 29.42 | 12.7 | 20.27 | 35.64 |
| 565 | - | - | - | - | 10.54 | 16.77 | 29.42 | 12.88 | 20.26 | 35.34 | |
| 615 | - | - | - | - | 10.94 | 13.73 | 15.64 | 13.22 | 16.55 | 18.82 | |
| 665 | - | - | - | - | 10.94 | 13.73 | 15.64 | 13.13 | 16.47 | 18.76 | |
| Trend | - | - | increase | increase | increase | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.-L.; Liu, X.-A.; Xu, M.-X.; Zhang, W.; Zheng, W.-J.; Dai, D.-R.; Tang, G.-J.; Wan, S.-T.; Gerada, D. Analysis of the Characteristics of Stator Circulating Current Inside Parallel Branches in DFIGs Considering Static and Dynamic Air-Gap Eccentricity. Energies 2022, 15, 6152. https://0-doi-org.brum.beds.ac.uk/10.3390/en15176152
He Y-L, Liu X-A, Xu M-X, Zhang W, Zheng W-J, Dai D-R, Tang G-J, Wan S-T, Gerada D. Analysis of the Characteristics of Stator Circulating Current Inside Parallel Branches in DFIGs Considering Static and Dynamic Air-Gap Eccentricity. Energies. 2022; 15(17):6152. https://0-doi-org.brum.beds.ac.uk/10.3390/en15176152
Chicago/Turabian StyleHe, Yu-Ling, Xiang-Ao Liu, Ming-Xing Xu, Wen Zhang, Wen-Jie Zheng, De-Rui Dai, Gui-Ji Tang, Shu-Ting Wan, and David Gerada. 2022. "Analysis of the Characteristics of Stator Circulating Current Inside Parallel Branches in DFIGs Considering Static and Dynamic Air-Gap Eccentricity" Energies 15, no. 17: 6152. https://0-doi-org.brum.beds.ac.uk/10.3390/en15176152