
Electrothermal Multicriteria Comparative Analysis of Two Competitive Powertrains Applied to a Two Front Wheel Driven Electric Vehicle during Extreme Regenerative Braking Operations



Abstract
:1. Introduction
1.1. General
1.2. State of the Art
1.3. Comparative Study between Z-Source and Classical Topologies
- -
- Comparative study based on electrical and thermal criteria for two competitive conversion powertrains: based on a 3-level DC/DC converter, and based on a Z-source converter.
- -
- Open-loop and closed-loop control strategies have been implemented in the Z-source using the maximal constant boost control with the 3rd harmonic injection modulation technique.
- -
- The two considered structures are implemented in a two-front wheel electric vehicle during extreme regenerative braking operations in simulation environment.
- -
- Analysis of the different simulation results have been performed based on the cited criteria.
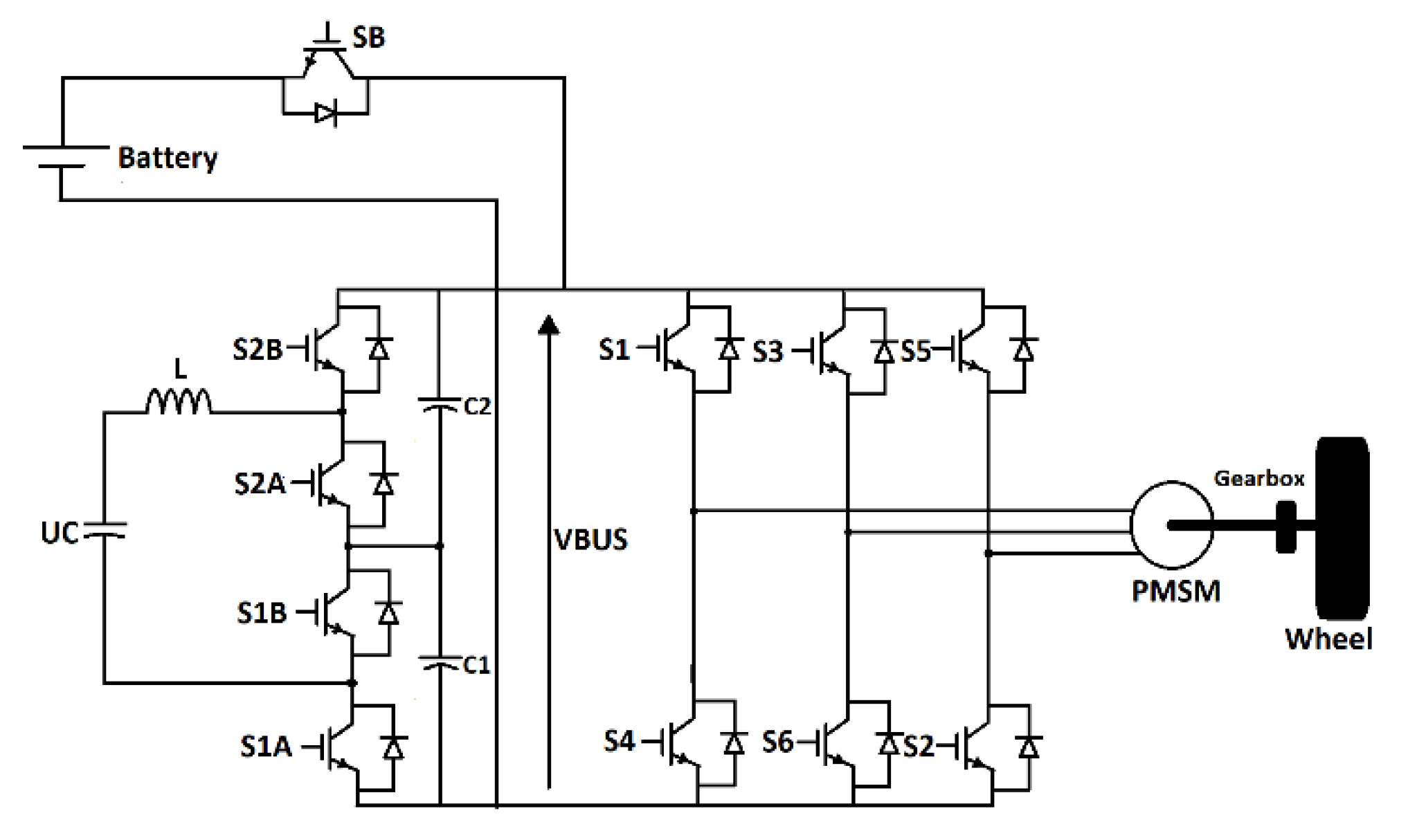
1.4. System Description
2. Z-Source Converter
2.1. Introduction
2.2. Z-Source Structures Fundamentals
2.2.1. Three-Phase Z-Source Inverter
2.2.2. Bidirectional Quasi-Impedance Source Inverter
2.2.3. Passive Components Requirements
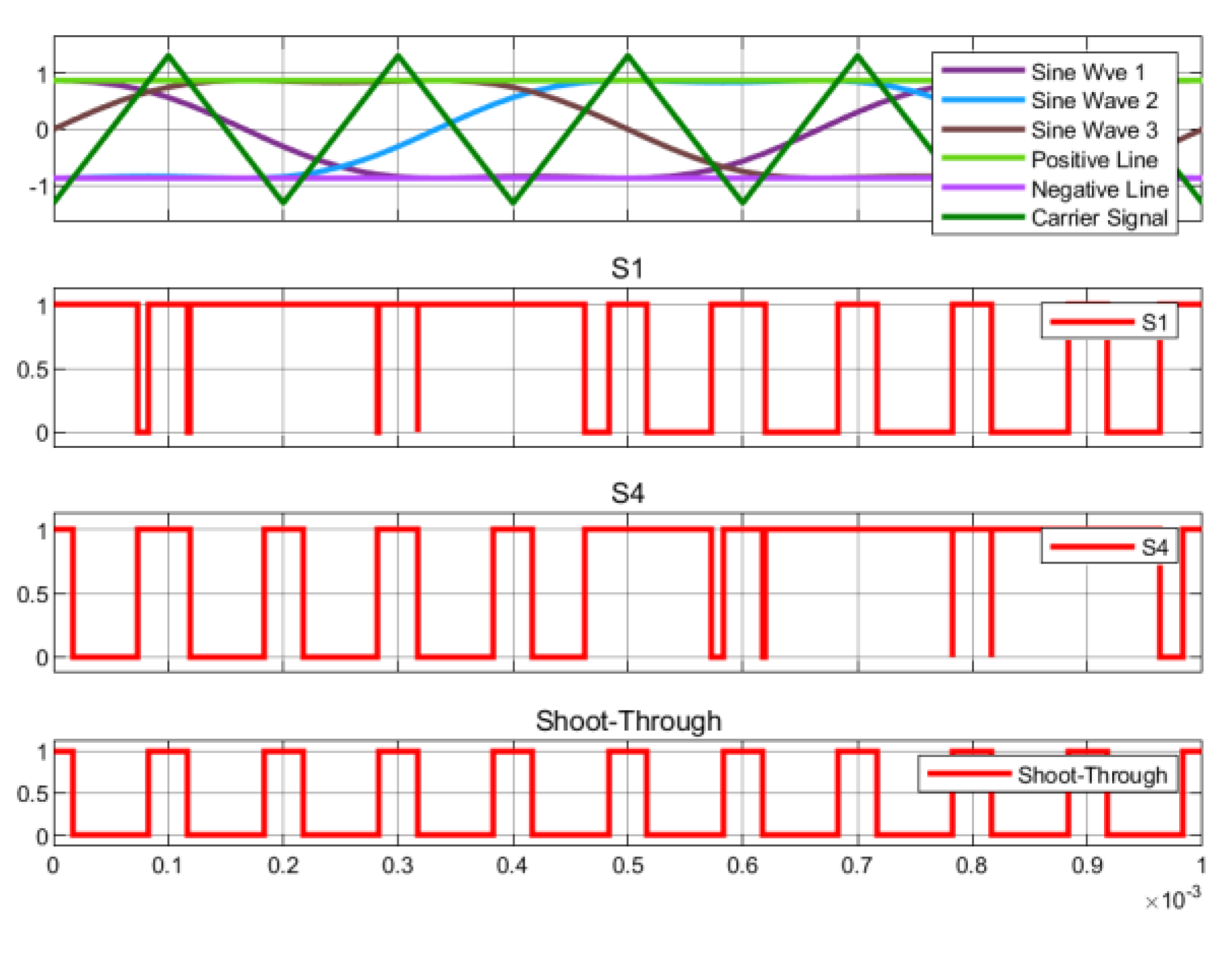
2.2.4. Types of Modulation Techniques
2.2.5. Open-Loop Control
2.2.6. Closed-Loop Control
DC Side Control
AC Side Control
2.2.7. IGBT Power Switches Selection for Z-Source Closed-Loop Control
3. Level DC/DC Converter Associated to a SVPWM Inverter
3.1. Introduction
3.2. 3-Level DC/DC Converter Control Introduction
3.3. DC/AC Converter Modulation Technique
3.4. IGBT Power Switches Selection
4. Thermal Model and Power Loss Calculation
4.1. Introduction
4.2. Thermal Model
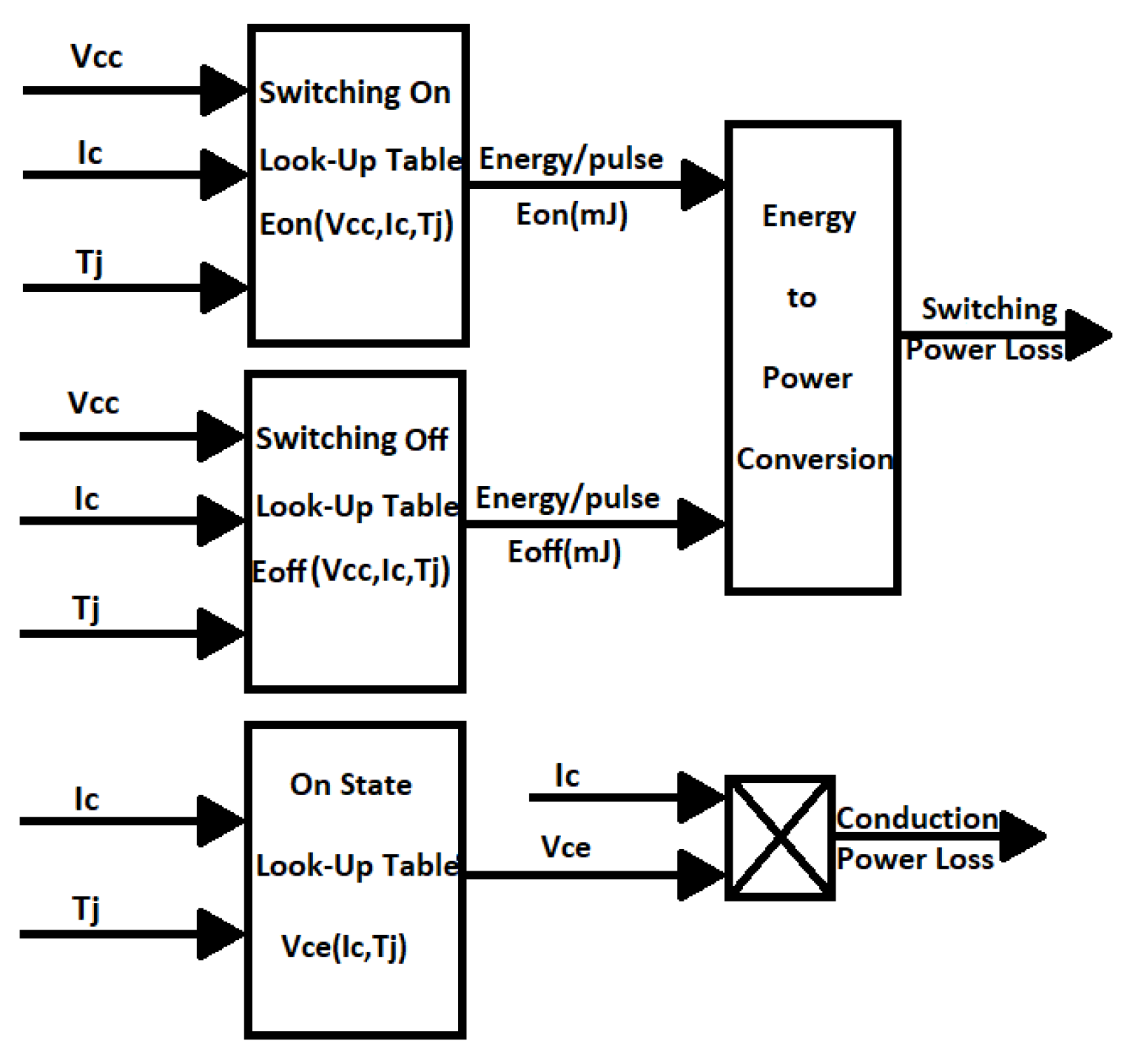
4.3. Power Losses Calculation of the Switching Devices
4.3.1. IGBT Power Losses
4.3.2. Diode Power Losses
5. Simulation Validation
5.1. Introduction
5.2. Simulation Models
- the initial speed of the motor (at rest for traction test or running at a certain velocity for braking test);
- the steering angle (taken at 0°) of the front wheels: the test is performed for a longitudinal motion. The vehicle model has been developed using the dynamic and kinematic equations of a 5 DoF (degrees of freedom) vehicle (four rotation wheels and yawing movement). The actual objective is to evaluate the HESS performance in terms of electrical transients’ comportment, energy recuperation, and power efficiency. The stability of the vehicle in extreme braking condition while steering is yet an interesting research topic;
- The braking or acceleration severity: extreme braking conditions will be performed assuring extreme power regeneration depending on the road condition and wheels’ torque distribution according to the ECE R13H assuring safety of the driver on one hand and the stability of the vehicle on the other hand;
- Road conditions: which will have a significant effect on the torque distribution and thus on the power regeneration scope at the HESS level.
5.3. Simulation Tests
5.3.1. Simulation Set-Up
5.3.2. Simulation Parameters
5.3.3. Controller Settings
5.4. Simulation Results and Comparison
5.4.1. Voltage and Current Stresses of DC/DC Converters IGBT Modules
5.4.2. DC Bus Voltage
5.4.3. Voltage and Current Stresses of the Inverters IGBT Modules
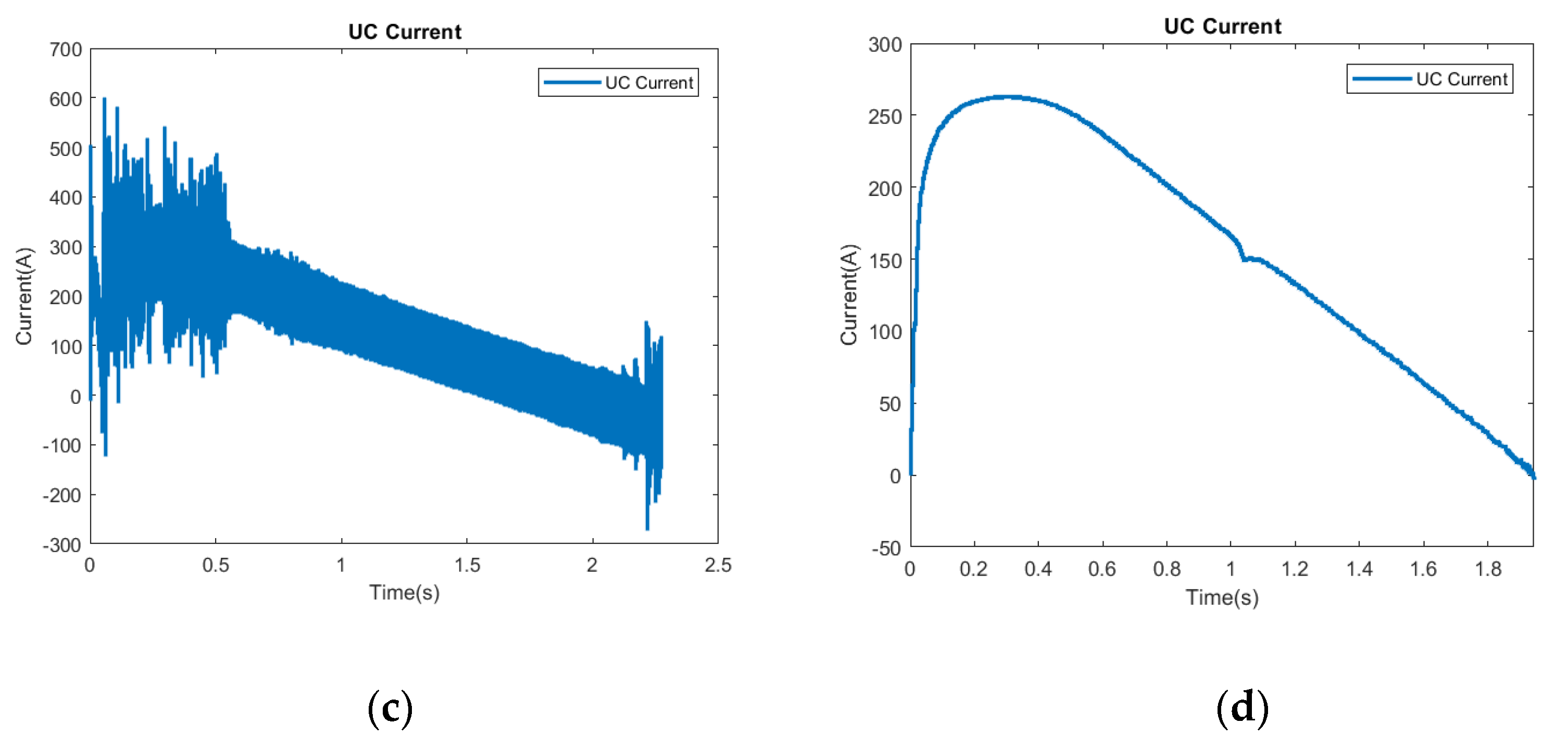
5.4.4. Ultracapacitor Voltage and Current
5.4.5. Torque and Power Generated
5.4.6. Power Losses and Efficiencies
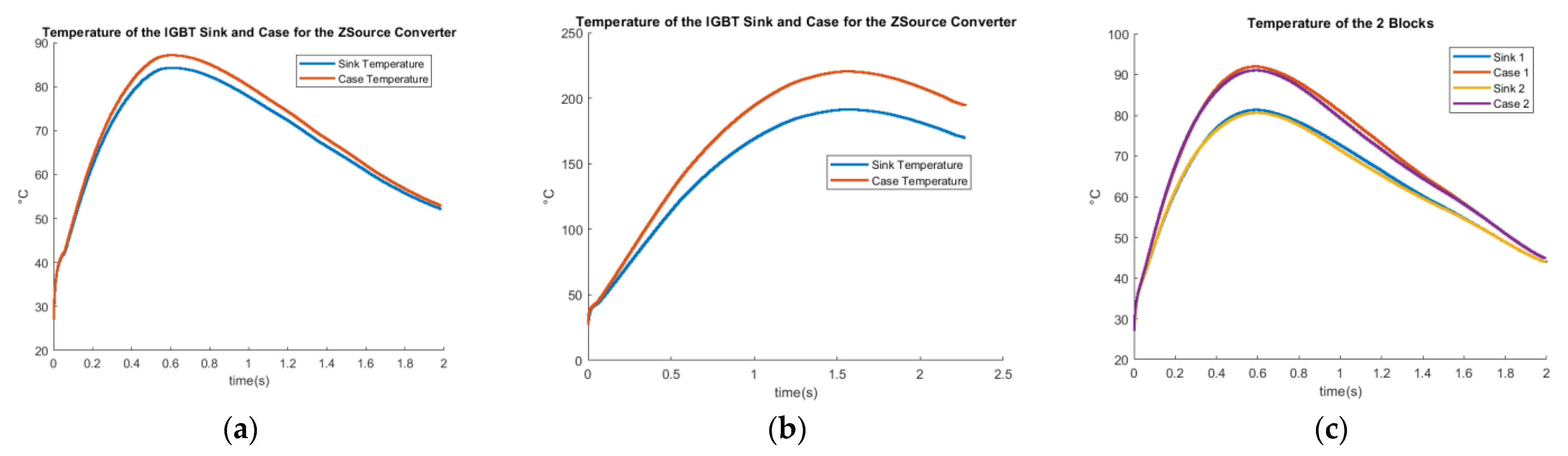
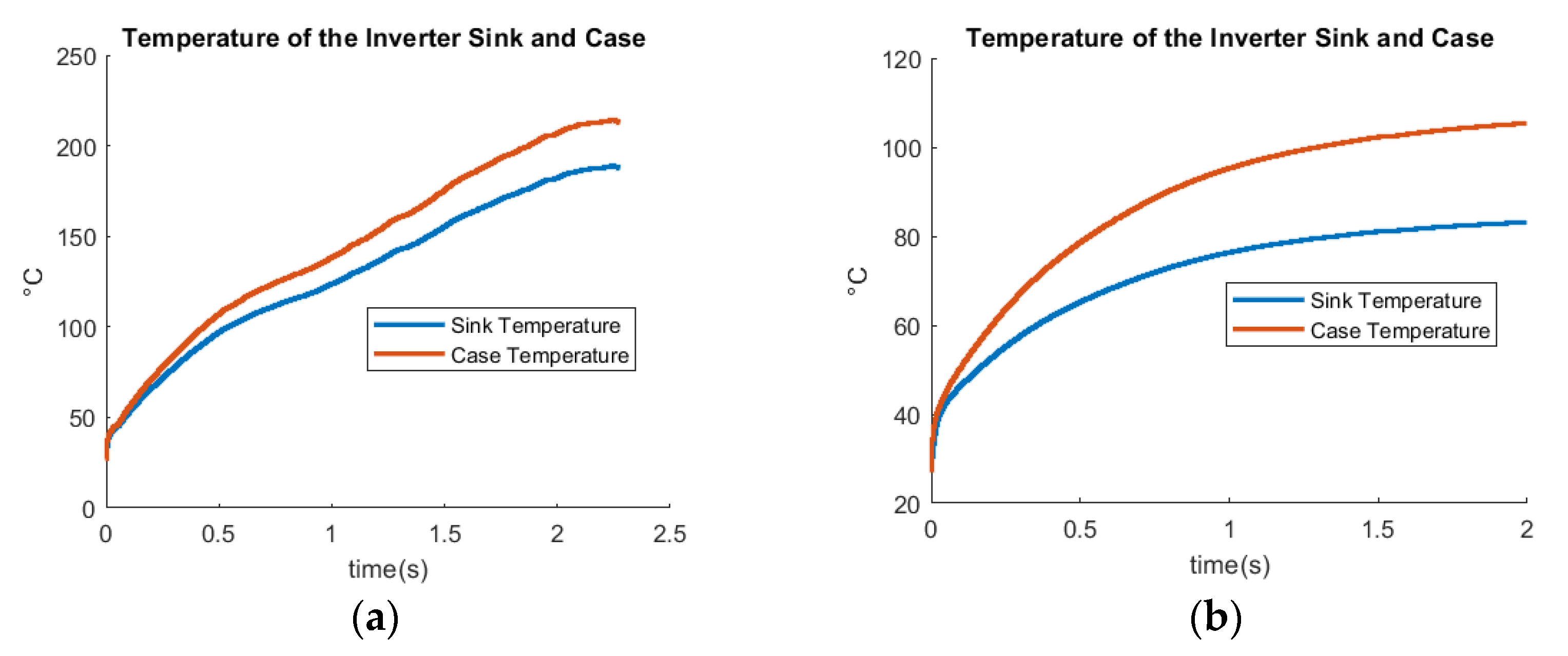
5.4.7. Temperature Evolution
5.4.8. Spectral Analysis
6. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Sandrini, G.; Chindamo, D.; Gadola, M. Regenerative Braking Logic That Maximizes Energy Recovery Ensuring the Vehicle Stability. Energies 2022, 15, 5846. [Google Scholar] [CrossRef]
- Vodovozov, V.; Raud, Z.; Petlenkov, E. Review on Braking Energy Management in Electric Vehicles. Energies 2021, 14, 4477. [Google Scholar] [CrossRef]
- Peng, F.Z. Z-source inverters. In Wiley Encyclopedia of Electrical and Electronics Engineering; 1999; pp. 1–11. Available online: https://0-onlinelibrary-wiley-com.brum.beds.ac.uk/doi/abs/10.1002/047134608X.W8348 (accessed on 7 October 2022).
- Peng, F.Z. Z-Source Inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Battiston, A.; Martin, J.-P.; Miliani, E.-H.; Nahid-Mobarakeh, B.; Pierfederici, S.; Meibody-Tabar, F. Comparison Criteria for Electric Traction System Using Z-Source/Quasi Z-Source Inverter and Conventional Architectures. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 467–476. [Google Scholar] [CrossRef]
- Ibtissam, C.; Asma, B.; Zahra, H.F.; Ouarda, B.; El-Madjid, B. Comparative study between diffirent control strategy of the z-source inverter. In Proceedings of the 5th International Conference on Electrical Engineering, Boumerdes, Algeria, 29–31 October 2017. [Google Scholar]
- Cong-Thanh, P.; Anwen, S.; Phan Quoc, D.; Nguyen Bao, A.; Nguyen Xuan, P. A comparison of control methods for Z-source inverter. Energy Power Eng. 2012, 4, 20233. [Google Scholar]
- Adle, R.V.; Renge, M.M. Comparison of Shoot through Technique for Series Z-Source Inverter. HELIX 2020, 10, 241–244. [Google Scholar] [CrossRef] [Green Version]
- Husodo, B.; Anwari, M.; Ayob, S. Analysis and simulations of Z-source inverter control methods. In Proceedings of the Conference Proceedings IPEC, Singapore, 27–29 October 2010. [Google Scholar]
- Tong, W.P.Q.; Ramadan, B.M.; Logenthiran, T. A Comparative Analysis between Z-Source and Quasi-Z-Source Inverters for Boost Operation. In Proceedings of the Asian Conference on Energy, Power and Transportation Electrification (ACEPT), Singapore, 30 October–2 November 2018. [Google Scholar]
- Mohammadi, M.; Moghani, J.; Milimonfared, J. A novel dual switching frequency modulation for Z-source and quasi-Z-source inverters. IEEE Trans. Ind. Electron. 2017, 65, 5167–5176. [Google Scholar] [CrossRef]
- Hossameldin, A.A.; Abdelsalam, A.K.; Ibrahim, A.A.; Williams, B.W. Enhanced performance modified discontinuous PWM technique for three-phase Z-source inverter. Energies 2020, 13, 578. [Google Scholar] [CrossRef] [Green Version]
- Khajesalehi, J.; Hamzeh, M.; Sheshyekani, K.; Afjei, E. Modeling and control of quasi Z-source inverters for parallel operation of battery energy storage systems: Application to microgrids. Electr. Power Syst. Res. 2015, 125, 164–173. [Google Scholar] [CrossRef]
- Peng, F.Z.; Shen, M.; Holland, K. Application of Z-Source Inverter for Traction Drive of Fuel Cell—Battery Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2007, 22, 1054–1061. [Google Scholar] [CrossRef]
- Sathishkumar, R.; Malathi, V.; Sakthivel, E. Real Time Implementation of Quazi Z-Source Inverter Incorporated with Renewable Energy Source. Energy Procedia 2017, 117, 927–934. [Google Scholar] [CrossRef]
- Peng, F.; Yuan, X.; Fang, X.; Qian, Z. Z-source inverter for adjustable speed drives. IEEE Power Electron. Lett. 2003, 1, 33–35. [Google Scholar] [CrossRef]
- Guo, F.; Fu, L.; Lin, C.-H.; Li, C.; Wang, J. Small signal modeling and controller design of a bidirectional Quasi-Z-Source inverter for electric vehicle applications. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15 September 2012; pp. 2223–2228. [Google Scholar]
- Battiston, A.; Miliani, E.; Pierfederici, S.; Meibody-Tabar, F. Efficiency improvement of a quasi-Z-source inverter-fed permanent-magnet synchronous machine-based electric vehicle. IEEE Trans. Transp. Electrif. 2016, 2, 14–23. [Google Scholar] [CrossRef]
- Guo, F.; Fu, L.; Lin, C.; Choi, L.C.W.; Wang, J. Development of an 85-kW bidirectional quasi-Z-source inverter with DC-link feed-forward compensation for electric vehicle applications. IEEE Trans. Power Electron. 2013, 28, 5477–5488. [Google Scholar] [CrossRef]
- Li, T.; Cheng, Q. A comparative study of Z-source inverter and enhanced topologies. CES Trans. Electr. Mach. Syst. 2018, 2, 284–288. [Google Scholar] [CrossRef]
- Tang, Y.; Xie, S.; Ding, J. Pulsewidth Modulation of Z-Source Inverters With Minimum Inductor Current Ripple. IEEE Trans. Ind. Electron. 2013, 61, 98–106. [Google Scholar] [CrossRef]
- Liu, Y.; Ge, B.; Abu-Rub, H.; Peng, F.Z. Overview of Space Vector Modulations for Three-Phase Z-Source/Quasi-Z-Source Inverters. IEEE Trans. Power Electron. 2013, 29, 2098–2108. [Google Scholar] [CrossRef]
- Rymarski, Z.; Bernacki, K.; Dyga, Ł. Controlled Energy Flow in Z-Source Inverters. Energies 2021, 14, 7272. [Google Scholar] [CrossRef]
- Yaici, W.; Kouchachvili, L.; Entchev, E.; Longo, M. Dynamic Simulation of Battery/Supercapacitor Hybrid Energy Storage System for the Electric Vehicles. In Proceedings of the 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019. [Google Scholar]
- Grün, T.; Doppelbauer, M. Comparative Concept Study of Passive Hybrid Energy Storage Systems in 48 V Mild Hybrid Vehicles Varying Lithium-Ion Battery and Supercapacitor Technologies. World Electr. Veh. J. 2019, 10, 71. [Google Scholar] [CrossRef] [Green Version]
- Vladimir, P.; Iurii, P.; Nikita, P. Three-Loop Control System of Energy Storage Device in the Frequency-Controlled Electric Drive. In Proceedings of the 26th International Workshop on Electric Drives: Improvement in Efficiency of Electric Drives (IWED), Moscow, Russia, 30 January–2 February 2019. [Google Scholar]
- Zheng, C.; Li, W.; Liang, Q. An energy management strategy of hybrid energy storage systems for electric vehicle applications. IEEE Trans. Sustain. Energy 2018, 9, 1880–1888. [Google Scholar] [CrossRef]
- Masih-Tehrani, M.; Dahmardeh, M. A Novel Power Distribution System Employing State of Available Power Estimation for a Hybrid Energy Storage System. IEEE Trans. Ind. Electron. 2017, 65, 6676–6685. [Google Scholar] [CrossRef]
- Dolara, A.; Leva, S.; Moretti, G.; Mussetta, M.; De Novaes, Y.R. Design of a Resonant Converter for a Regenerative Braking System Based on Ultracap Storage for Application in a Formula SAE Single-Seater Electric Racing Car. Electronics 2021, 10, 161. [Google Scholar] [CrossRef]
- Hu, S.; Liang, Z.; Fan, D.; He, X. Hybrid Ultracapacitor–Battery Energy Storage System Based on Quasi-Z-source Topology and Enhanced Frequency Dividing Coordinated Control for EV. IEEE Trans. Power Electron. 2016, 31, 7598–7610. [Google Scholar] [CrossRef]
- Hu, S.; Liang, Z.; He, X. Ultracapacitor-Battery Hybrid Energy Storage System Based on the Asymmetric Bidirectional Z -Source Topology for EV. IEEE Trans. Power Electron. 2015, 31, 7489–7498. [Google Scholar] [CrossRef]
- Raman, S.R.; Cheng, K.-W.; Xue, X.-D.; Fong, Y.-C.; Cheung, S. Hybrid Energy Storage System with Vehicle Body Integrated Super-Capacitor and Li-Ion Battery: Model, Design and Implementation, for Distributed Energy Storage. Energies 2021, 14, 6553. [Google Scholar] [CrossRef]
- Omran, K.C.; Mosallanejad, A. SMES/battery hybrid energy storage system based on bidirectional Z-source inverter for electric vehicles. IET Electr. Syst. Transp. 2018, 8, 215–220. [Google Scholar] [CrossRef]
- Nguyen, M.-K.; Duong, T.-D.; Lim, Y.-C.; Choi, J.-H.; Vilathgamuwa, D.M.; Walker, G.R. DC-Link Quasi-Switched Boost Inverter With Improved PWM Strategy and its Comparative Evaluation. IEEE Access 2020, 8, 53857–53867. [Google Scholar] [CrossRef]
- Panfilov, D.; Husev, O.; Blaabjerg, F.; Zakis, J.; Khandakji, K. Comparison of three-phase three-level voltage source inverter with intermediate dc–dc boost converter and quasi-Z-source inverter. IET Power Electron. 2016, 9, 1238–1248. [Google Scholar] [CrossRef]
- Franke, W.-T.; Mohr, M.; Fuchs, F.W. Comparison of a Z-source inverter and a voltage-source inverter linked with a DC/DC-boost-converter for wind turbines concerning their efficiency and installed semiconductor power. In Proceedings of the IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008. [Google Scholar]
- Ayad, A.; Hanafiah, S.; Kennel, R. A comparison of quasi-Z-source inverter and traditional two-stage inverter for photovoltaic application, in Proceedings of PCIM Europe 2015. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 19–20 May 2015. [Google Scholar]
- Aravindan, M.; Balaji, V.; Saravanan, V.; Arumugam, M. Topologies of single phase Z source inverters for photovoltaic systems. In Proceedings of the Biennial International Conference on Power and Energy Systems: Towards Sustainable Energy (PESTSE), Bengaluru, India, 21–23 January 2016. [Google Scholar]
- LATIFI, H. Enhanced Performance Bidirectional Quasi-Z-Source Inverter Controller; University of East London: Oxon, UK, 2015. [Google Scholar]
- Ellabban, O.; Van Mierlo, J.; Lataire, P. Control of a Bidirectional Z-Source Inverter for Electric Vehicle Applications in Different Operation Modes. J. Power Electron. 2011, 11, 120–131. [Google Scholar] [CrossRef] [Green Version]
- Jokar Kouhanjani, M.; Seifi, A.R.; Mehrtash, M. Dynamic model and small signal analysis of Z-source inverter. IETE J. Res. 2019, 65, 342–350. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Optimal traction and regenerative braking reference current synthesis for an IPMSM motor using three combined torque control methods for an electric vehicle. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016. [Google Scholar]
- Kowalsky, J.; Simon, T.; Geske, M.; Basler, T.; Lutz, J. Surge current behaviour of different IGBT designs. In Proceedings of the Proceedings of PCIM Europe 2015, Nuremberg, Germany, 19–20 May 2015. [Google Scholar]
- Basler, T.; Lutz, J.; Jakob, R.; Brückner, T. Surge current capability of IGBTs. In Proceedings of the International Multi-Conference on Systems, Signals & Devices, Chemnitz, Germany, 20–23 March 2012. [Google Scholar]
- Global, F.E. IGBT Modules. Available online: https://www.fujielectric.com/products/semiconductor/parametric-search/ (accessed on 10 January 2020).
- Grbovic, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. Modeling and Control of the Ultracapacitor-Based Regenerative Controlled Electric Drives. IEEE Trans. Ind. Electron. 2011, 58, 3471–3484. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. A Bidirectional Three-Level DC–DC Converter for the Ultracapacitor Applications. IEEE Trans. Ind. Electron. 2010, 57, 3415–3430. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, X.; Manandhar, U.; Gooi, H.B.; Liu, Y.; Tan, X. Bidirectional Three-Level Cascaded Converter With Deadbeat Control for HESS in Solar-Assisted Electric Vehicles. IEEE Trans. Transp. Electrification 2019, 5, 1190–1201. [Google Scholar] [CrossRef]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A.; Oueidat, M. Regenerative Braking Modeling, Control, and Simulation of a Hybrid Energy Storage System for an Electric Vehicle in Extreme Conditions. IEEE Trans. Transp. Electrification 2016, 2, 465–479. [Google Scholar] [CrossRef]
- Ivakhno, V.; Zamaruiev, V.V.; Ilina, O. Estimation of Semiconductor Switching Losses under Hard Switching using Matlab/Simulink Subsystem. Electr. Control Commun. Eng. 2013, 2, 20–26. [Google Scholar] [CrossRef]
- Wei, K.; Zhang, C.; Gong, X.; Kang, T. IGBT losses analysis and calculation of inverter for two-seat electric aircraft application. Energy Procedia 2017, 105, 2623–2628. [Google Scholar] [CrossRef]
- Al Hadi, A.; Challoo, R.; Fu, X. IGBT module loss calculation and thermal resistance estimation for a grid-connected multilevel converter. Wide Bandgap Power Energy Devices Appl. III 2018, 10754, 107540F. [Google Scholar]
- Avenas, Y.; Dupont, L.; Khatir, Z. Temperature measurement of power semiconductor devices by thermo-sensitive electrical parameters—A review. IEEE Trans. Power Electron. 2011, 27, 3081–3092. [Google Scholar] [CrossRef] [Green Version]
- An, N.; Du, M.; Hu, Z.; Wei, K. A High-Precision Adaptive Thermal Network Model for Monitoring of Temperature Variations in Insulated Gate Bipolar Transistor (IGBT) Modules. Energies 2018, 11, 595. [Google Scholar] [CrossRef] [Green Version]
- Itani, K.; De Bernardinis, A.; Khatir, Z.; Jammal, A. Comparison between two braking control methods integrating energy recovery for a two-wheel front driven electric vehicle. Energy Convers. Manag. 2016, 122, 330–343. [Google Scholar] [CrossRef]
- U. Nations, ECE/324/Rev.1/Add.12/Rev.8, Addendum 12: Regulation No.13, Agreement Concerning the Adoption of Uniform Technical Prescriptions for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles and the Conditions for Recipro, United Nations. 3 March 2014. Available online: https://unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2015/R013r8e.pdf (accessed on 17 November 2014).






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Stator winding resistance | 0.45 (Ω) | |
| d-axis inductance | 0.54 (mH) | |
| q-axis inductance | 1.05 (mH) | |
| Number of pole pairs | p | 3 |
| Permanent magnet flux linkage | 0.148 (mWb) | |
| Viscous friction coefficient | B | 0 |
| Motor moment of inertia | 0.3 (kg·m2) | |
| Nominal power | P | 30 (kW) |
| Line to line voltage | 230 (V) | |
| Maximal current | 100 (A) |
| Parameter | Symbol | Value |
|---|---|---|
| Maximal voltage | Uc0max | 325 (V) |
| Minimal voltage | Uc0min | 165 (V) |
| Stored energy | Es | 108.8 Wh (SoCmin = 25%) |
| Parameter | Symbol | Value |
|---|---|---|
| Ultracapacitor Capacitance | 10 (F) | |
| Ultracapacitor Series Resistance | 70 (mΩ) | |
| Inductor | 50 (mH) | |
| Inductor Series Resistance | 50 (mΩ) | |
| Capacitors | C | 1 (mF) |
| Capacitors Series Resistance | 20 (mΩ) |
| Parameter | Symbol | Value |
|---|---|---|
| Inductors | 0.1 (mH) | |
| Inductor Series Resistance | 20 (mΩ) | |
| Capacitors | 706 (μF) | |
| Capacitors Series Resistance | 18 (mΩ) |
| Topology | Controller Type | Gain | ||
|---|---|---|---|---|
| Common Settings | Motor Current Controllers | d-axis Controller current | Proportional Gain | 0.54 |
| Integral Gain | 450 | |||
| q-axis Current Controller | Proportional Gain | 1.05 | ||
| Integral Gain | 450 | |||
| 3-Level DC/DC/SVPWM Topology | DC Bus Voltage Controller | Proportional Gain | −0.1407 | |
| Integral Gain | −13.2236 | |||
| Antiwindup gain | −3 | |||
| UC Voltage Controller | Proportional Gain | 140 | ||
| Integral Gain | Calculated in real time | |||
| Antiwindup Gain | 1 | |||
| UC Current Controller | Proportional Gain | 312.5 | ||
| Integral Gain | 300 | |||
| Modulation Technique | Space Vector PWM | |||
| Bidirectional Quasi-Z-Source Inverter Topology | Index Modulation Controller | Proportional Gain | 0.0001 | |
| Integral Gain | 0.05 | |||
| Antiwindup gain | 1 | |||
| Modulation Technique | Maximum Constant Boost Control with Third Harmonic Injection | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Itani, K.; De Bernardinis, A. Electrothermal Multicriteria Comparative Analysis of Two Competitive Powertrains Applied to a Two Front Wheel Driven Electric Vehicle during Extreme Regenerative Braking Operations. Energies 2022, 15, 8506. https://0-doi-org.brum.beds.ac.uk/10.3390/en15228506
Itani K, De Bernardinis A. Electrothermal Multicriteria Comparative Analysis of Two Competitive Powertrains Applied to a Two Front Wheel Driven Electric Vehicle during Extreme Regenerative Braking Operations. Energies. 2022; 15(22):8506. https://0-doi-org.brum.beds.ac.uk/10.3390/en15228506
Chicago/Turabian StyleItani, Khaled, and Alexandre De Bernardinis. 2022. "Electrothermal Multicriteria Comparative Analysis of Two Competitive Powertrains Applied to a Two Front Wheel Driven Electric Vehicle during Extreme Regenerative Braking Operations" Energies 15, no. 22: 8506. https://0-doi-org.brum.beds.ac.uk/10.3390/en15228506