1. Introduction
With the continuous development of space exploration, the cryogenic refrigerator for space detectors needs to seek a higher efficiency and lower minimum temperature [
1,
2,
3]. Recently, linear compressors that provide a pressure ratio and mass flow for space cryogenic refrigerators have been studied. The linear compressor adopts the flexure spring support and gap sealing technology, which reduces the friction loss on the piston. Therefore, the mechanical efficiency of the compressor is improved, which is 20% higher than the overall efficiency of the traditional piston compressors [
4].
The linear compressor can be divided into the valved linear compressor and the valveless linear compressor, which are respectively applied to different space refrigerator systems. Generally, valveless linear compressors are commonly applied to pulse tube refrigerators and Stirling refrigerators, while valved linear compressors are applied Joule–Thomson (J-T) throttling refrigerators [
5,
6,
7,
8]. Compared with the valveless linear compressors, valved linear compressors can establish a higher pressure ratio which is currently the research hotspot.
As an important moving and energy-consuming component of the cryocooler, the valved linear compressor affects the cooling capacity and efficiency of the refrigerator [
9,
10,
11]. Consequently, it is extremely crucial to improve the efficiency of the valved linear compressor. Some scholars have made different explorations for the improvement of efficiency.
Firstly, the volume efficiency of the valved linear compressors could be improved by reducing the clearance volume. Hanying J et al. discovered that when the clearance is reduced from 0.8 mm to 0.6 mm, an averaged 4% increase in the experimental volumetric efficiency was achieved [
12]. However, this method could cause the risk of the piston hitting the cylinder and make the assembly process more difficult.
When the piston of the linear compressor moves at full stroke, the offset will cause the pressure ratio, mass flow and motor efficiency to decrease [
13]. Therefore, controlling the piston offset is also an approach to improve efficiency. Liang et al. [
14,
15] showed the methods of controlling the piston offset, which is increasing the stiffness ratio of the mechanical to gas springs, superimposing a DC voltage to limit the motion of the piston, and control of the pressure in the cylinder. Zou et al. [
16] investigated the operating characteristics of the compressor under a different spring stiffness. It can be found that the spring stiffness had a significant impact on the compressor performance. Chen et al. illustrated that increasing the DC voltage can countervail the moving offset [
17]. Nevertheless, the DC offset control method brings about an additional electrical power loss and extra Joule heat on the coil. Qi H et al. connected the suction line to the compressor shell which increases the compressor chamber pressure and reduces the pressure difference, to reduce the offset [
18]. The approach could improve the motor efficiency, but will reduce the pressure ratio, in practice. In essence, the symmetrical dual-piston structure can minimize or even offset its own vibration [
19]. Jian S et al. [
20] describes that the dual piston system can significantly reduce the piston offset, in which the motor efficiency and volume efficiency are 87.9% and 79.1%. There is still insufficient research on the comparison of the efficiency between SVLCs and SDVLCs. Based on theory and experiment, this paper shows the difference in the volumetric efficiency, motor efficiency and isentropic efficiency in the valved linear compressors with different piston structures, respectively.
2. Structure and Working Principle of the Valved Linear Compressors
Figure 1 indicates the compositions of a SVLC and a SDVLC, respectively. They both include linear motors, flexure springs, cylinders, pistons, suction valves and discharge valves, etc. The linear motor is a moving coil structure, flexure springs support the coil and the piston to ensure the coaxiality of the cylinder. The discharge valves and the suction valves are arranged on the cylinders and the pistons. The reciprocating linear motor drives the piston to move in the cylinder and complete the compression and expansion process.
The difference between the two structures is that a coil drives a piston of the SVLC, and a coil drives two pistons of a dual-piston linear compressor. Two compression processes could be completed in one cycle of a dual-piston linear compressor, but that is only once of the SVLC.
The piston of the SDVLC reciprocates under the drive of the linear motor. The compression, discharge, expansion and suction processes are carried out, sequentially, in the cylinder. The suction valve and the discharge valve control the gas in and out of the cylinder. The working process illustration with the displacement direction is shown in
Table 1. Due to the lack of one piston, the SVLC has a simpler working process than the SDVLC, and the gas is only compressed, discharged, expanded and suctioned in one cylinder.
3. Theoretical Research on the Current and Velocity Characteristics
In addition to the gas force, the piston is subjected to an electromagnetic force during its motion. Due to the presence of friction losses, the system is mechanically damped. At the same time, the flexure springs also provide a reactive force during the motion of the piston. The gas force could be equivalent to a gas spring force, a gas damping and a static force. It should be noted that the static force does not exist in a SDVLC. Therefore, the whole linear compressor could be regarded as a single degree of freedom, damped forced vibration system [
21]. The dynamics of the linear compressor are modelled as
Figure 2.
When the electromagnetic force
, its kinetic equation is:
Substitute the initial conditions:
. Following the calculation, we could obtain the displacement:
Obviously, the first term on the right side of the equation is the decay term, and the displacement response at the steady state is:
The steady state response can be obtained by Equation (4):
It could be the first derivative and second derivative by Equations (5) and (6):
In addition to the incentive force in the system, it is:
There are also the following forces, namely the spring force
, damping force
and inertial force
, and equations are as follows:
The complex exponential form of the above quantities are shown in
Figure 3. When the angular frequency is equal to the natural angular frequency of the system, which is
, the inertial force is equal to the spring force. The equilibrium could only be achieved if the electromagnetic force (incentive force
F) is equal to the damping force
, the displacement lags the incentive force by
at this time, the electromagnetic force and velocity are in phase. Because the electromagnetic force and the current are in phase, it illustrates that the efficiency is the highest when the current and the velocity are in phase.
When assuming:
- (1)
The mover displacement is sinusoidal ;
- (2)
The compression and expansion process of the piston in the cylinder is an isentropic process.
- (3)
Ignore the leakage in the cylinder.
- (4)
Ignore the pressure fluctuations during the suction and the discharge process.
Figure 4 is a schematic diagram of the cylinder in SDVLC. Equations (11) and (12) are the pressure equation for the compression and expansion process in the cylinder. Equation (13) is the dynamic equation of the linear compressor mover. According to Kirchhoff’s voltage law, the voltage balance equation on the coil could be obtained by Equation (14) [
22]:
The parameters of the linear compressor are shown in
Table 2. The linear compressor parameters shown in
Table 2, are the parameters and boundary conditions in Equations (11)–(14). The parameters, such as the diameter of the piston, the mass of the mover, stiffness of the flexure spring, thrust coefficient, equivalent inductance and equivalent resistance are the actual parameters of the linear compressor rounded to the nearest value. Where the suction pressure and the discharge pressure are typical operating conditions with a 2.0 pressure ratio in the experiment. The mechanical damping coefficients cannot be measured, they can only be estimated.
Simultaneous Equations (13) and (14), we could obtain
Figure 5 and
Figure 6 of the current and velocity.
It could be seen from
Figure 5 and
Figure 6 that the velocity phase is a standard sinusoidal curve. Consequently, the variance
can be used to express the degree to which the current deviates from the velocity.
where
is the current at each moment,
is the velocity at each moment, and
N is the number of data groups.
In particular, it should be noted that the 0 point of the current in
Figure 5 and
Figure 6 is not at the centre of each figure. Apparently, the velocity and the current are reversed at some moments, as shown in
Figure 5 and
Figure 6. At this time, the electromagnetic force does negative work, which will reduce the efficiency of the whole linear compressor, the same direction rate
indicates the degree to which the current goes in the same direction as the velocity.
where
is the number of the current and velocity in the same direction in the data
,
is the total number of data. The specific results are shown in
Table 3.
Figure 5 and
Figure 6 also describe the current and velocity of the two types of linear compressors, when the pressure ratio is 2.0 and the operation is in the resonance state. It could be found that the current and velocity of the symmetrical dual-piston compressor are more in the same direction. The calculated results describe that the variance of the SVLC is 2.04 times as high as that for the SDVLC in
Table 3. The same direction ratio of the SDVLC is 29.51% higher than that of the SVLC. It can be concluded that the current of the SDVLC is more in phase with the velocity than the SVLC. In consequence, from this point of view, the efficiency of the two-piston opposed linear compressor is higher than that of the SVLC.
Figure 7 and
Figure 8 indicate the variance and the same direction ratio of the two types of linear compressors with different pressure ratios. It could be found that with the increase of the pressure ratio, the variance increases and the same direction ratio decreases. This demonstrates that the efficiency of the linear compressor decreases as the pressure ratio increases. In addition, it could be concluded from
Figure 7 and
Figure 8 that the symmetrical dual-piston valve linear compressor has a lower variance and a higher same direction rate at different pressure ratios. Therefore, the efficiency of the SDVLC is higher than the SVLC at different pressure ratios.
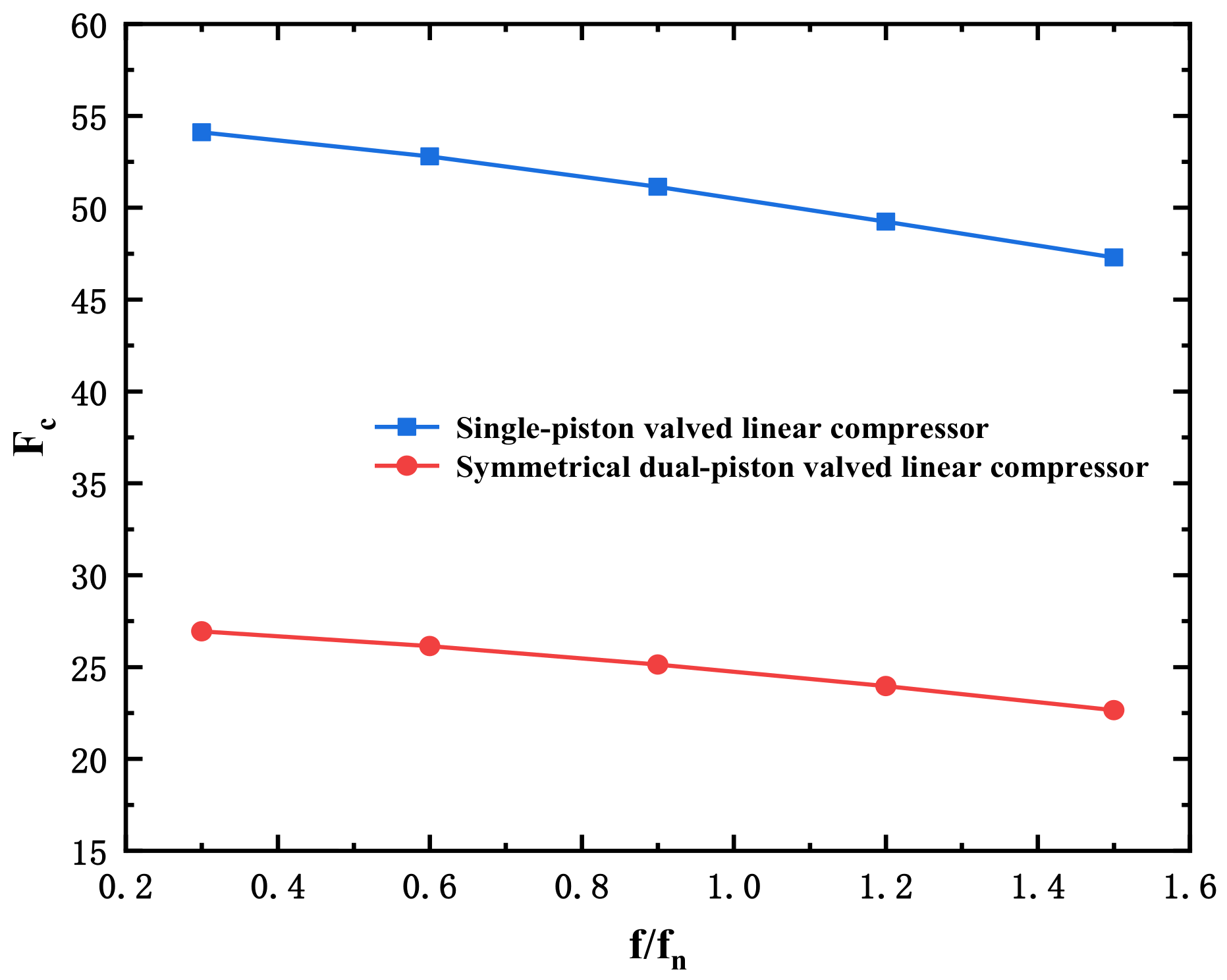
The variance and the same direction ratio of the two types of the linear compressors with different frequencies are shown in
Figure 9 and
Figure 10. Explicitly, with the increase of the frequency, the variance decreases, and the same direction ratio remains unchanged. Consequently, the efficiency of the linear compressor increases slowly as the frequency increases. Similarly, it could be seen from
Figure 9 and
Figure 10 that the symmetrical dual-piston valve linear compressor has a lower variance and a higher same direction rate at different frequencies. Accordingly, the efficiency of the SDVLC is higher than the SVLC at different frequencies.
6. Conclusions
The paper considers the linear compressor as a single degree of freedom, damped forced vibration system to solve the displacement response. It is deduced that the efficiency is highest when the current is in phase with the velocity. The dynamic equation and the electromagnetic equation of the linear compressor are calculated to obtain the cures of the current and velocity in the time domain. It is found that the current and velocity cures of the SVLC are more deviated after comparison. The variance and the same direction rate are used to evaluate the degree of in-phase between the current and velocity. The SVLC and the SDVLC are tested on the experimental system. The current and velocity cures are obtained respectively. Furthermore, the SVLC and the SDVLC are tested at different pressure ratios and different frequencies. The isentropic efficiency, volumetric efficiency, and motor efficiency of the two types of linear compressors are obtained after the experiments.
The variance of the SVLC is 2.04 times that of the SDVLC, but the same direction rate of the SDVLC is 29.51% higher than that of the SVLC. The current and velocity deviation of the SVLC association efficiency decrease. Therefore, it could be concluded that the efficiency of the SDVLC is higher than the SVLC.
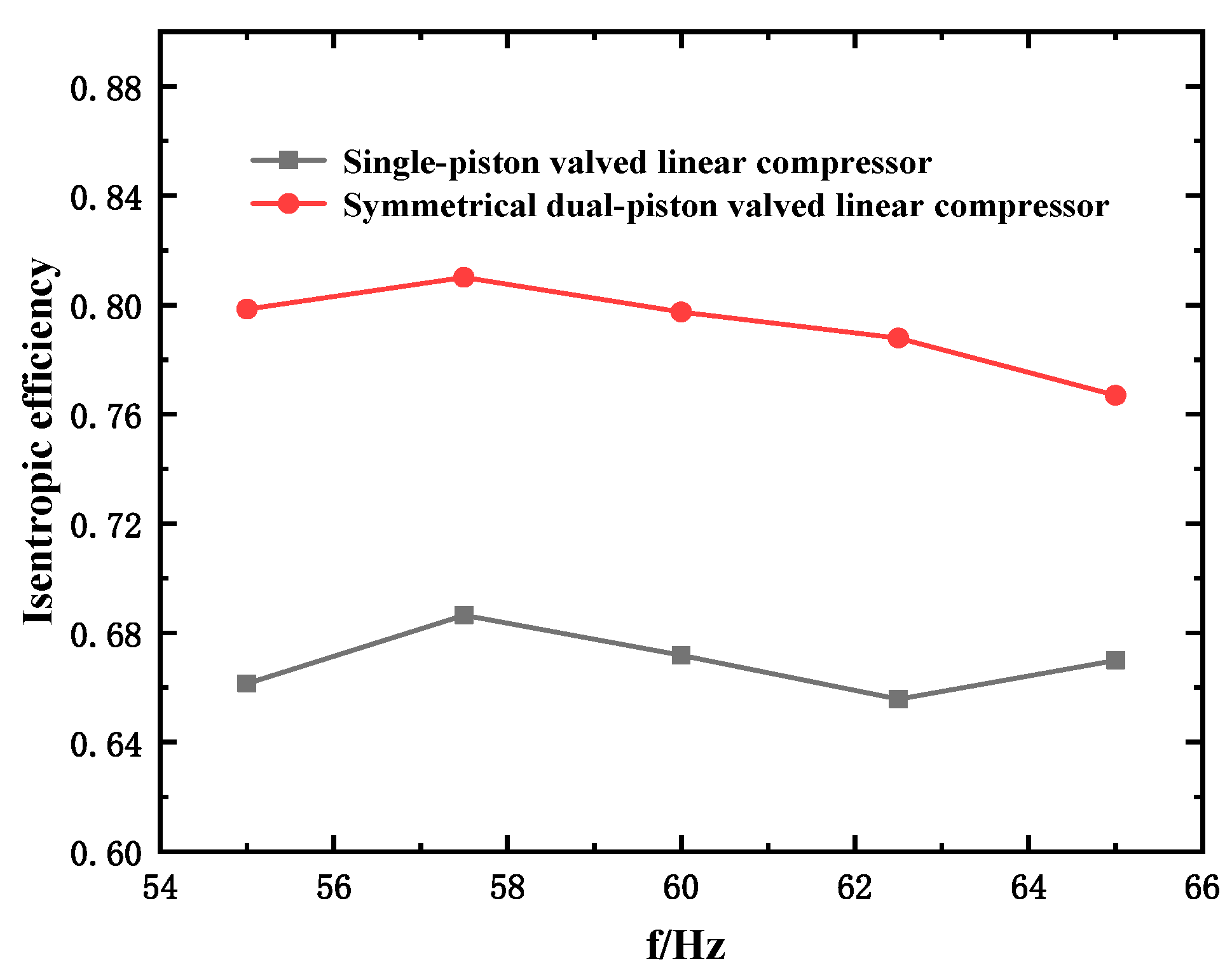
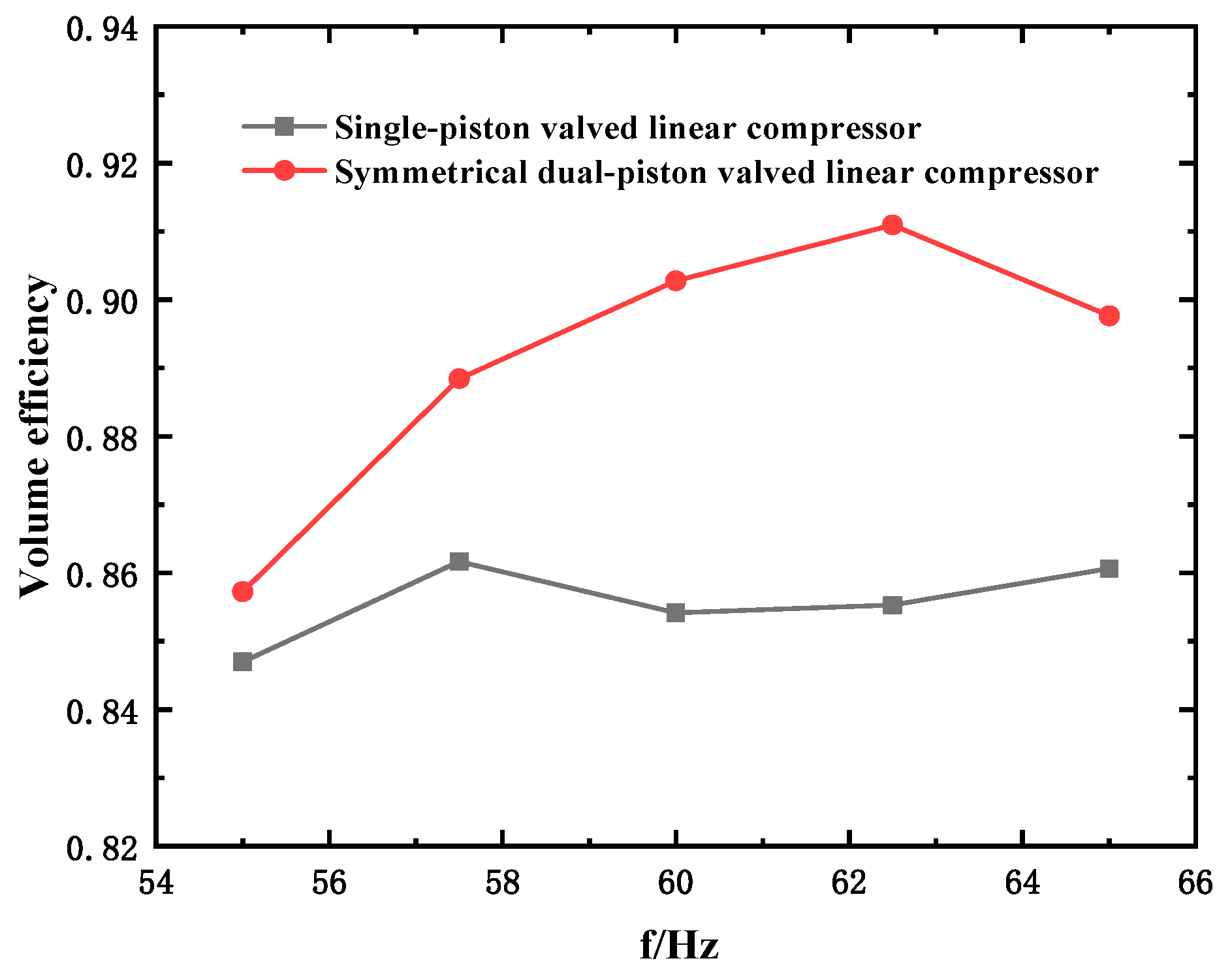
The experimental results and the calculated results have the same tendency. Under different working conditions, the isentropic efficiency of the SDVLC is higher than that of the SVLC. The average isentropic efficiency, average volumetric efficiency and average motor efficiency of the SDVLC are 19.67%, 5.6% and 1.9% higher than that of the SVLC at different pressure ratios. The values are 7%, 4.2% and 0.24% at different frequencies.
The reason for the higher efficiency of the SDVLC is that the current and velocity are more in-phase in the time domain. The in-depth reason is that the load of the SVLC is asymmetric in one cycle, this will cause the current to increase during the half cycle, making the deviation from the velocity. Therefore, the efficiency of the SDVLC is higher than the SVLC.
We conclude that the efficiency is the highest when the current and velocity are in the same phase by solving the dynamic equation. For the linear compressors, the efficiency of the double-piston structure is higher than that of the single-piston structure. We explain the reason for the efficiency difference in terms of the relationship between the current and velocity.
In the future, the efficiency of the single-piston linear compressors will be improved by adjusting the piston offset and reducing the clearance and observing the relationship between the comparative current and speed. It may be possible to increase the efficiency by modulating the current with a device, such as a signal generator that is more in tune with the speed.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





