
Effect of Rotor Bars Shape on the Single-Phase Induction Motors Performance: An Analysis toward Their Efficiency Improvement


Abstract
:1. Introduction
2. Motivation and Contribution of the Work
3. Specifications of the SPIM under Study
4. Analysis of Important Aspects in SPIM Design
5. SPIM Modeling and Finite Element Analysis
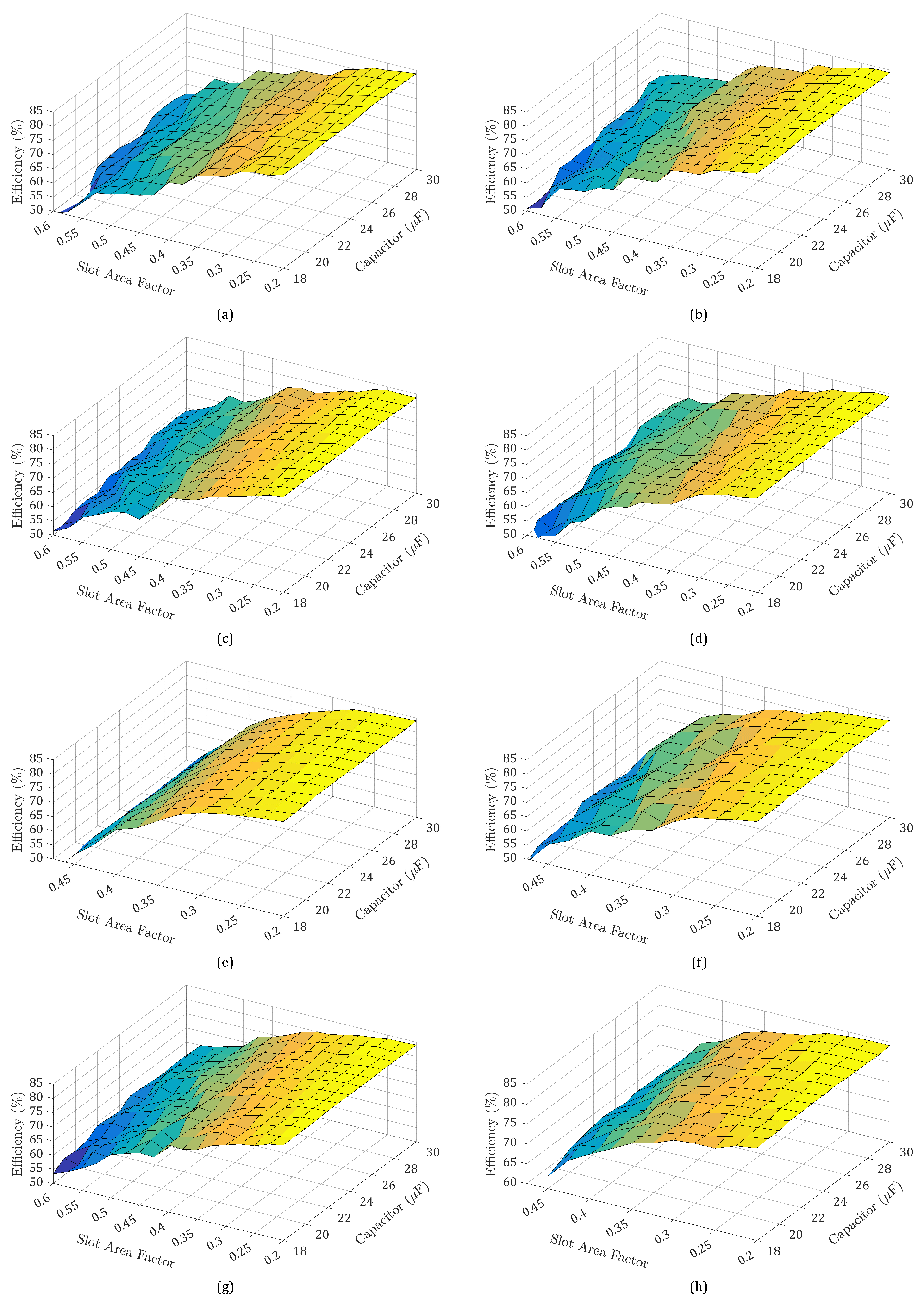
6. Sensitivity Analysis Results
7. Comparison of the SPIMs with the Highest Efficiency
- (a)
- The constraints regarding: (i) the motor’s net mass (i.e., 14.0 kg), (ii) the main/ auxiliary winding current densities (i.e., , ≤3.5 A/mm), and (iii) the starting to nominal torque ratio (i.e., / 0.35) are met. Moreover, the starting to nominal current ratio (/) is always lower than 8.0. The SPIMs with pent and rectangular rotor bars present the lowest values for this ratio, and they have clear advantage over the other models. The / ratio ranges from 4.61 to 6.24 for the machines with bars of pentagonal shape. The ratio value ranges from 4.82 to 6.42 when rectangular bars are utilized. On the contrary, the topologies with trapezoidal bars exhibit the highest values for this ratio, i.e., 6.52–7.17. The starting current decreases notably as the rotor bar’s cross-sectional area becomes smaller and a capacitance of high value is used.
- (b)
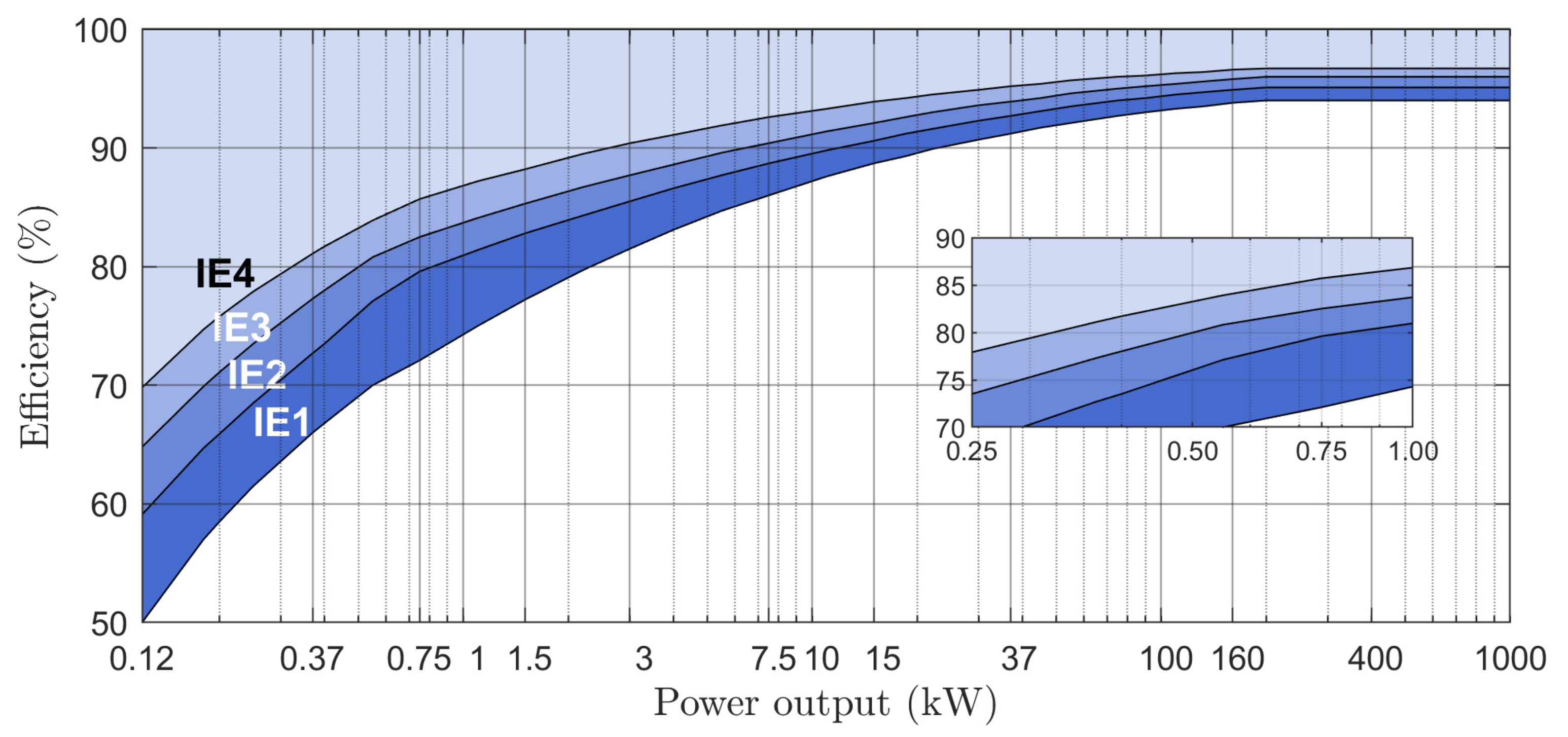
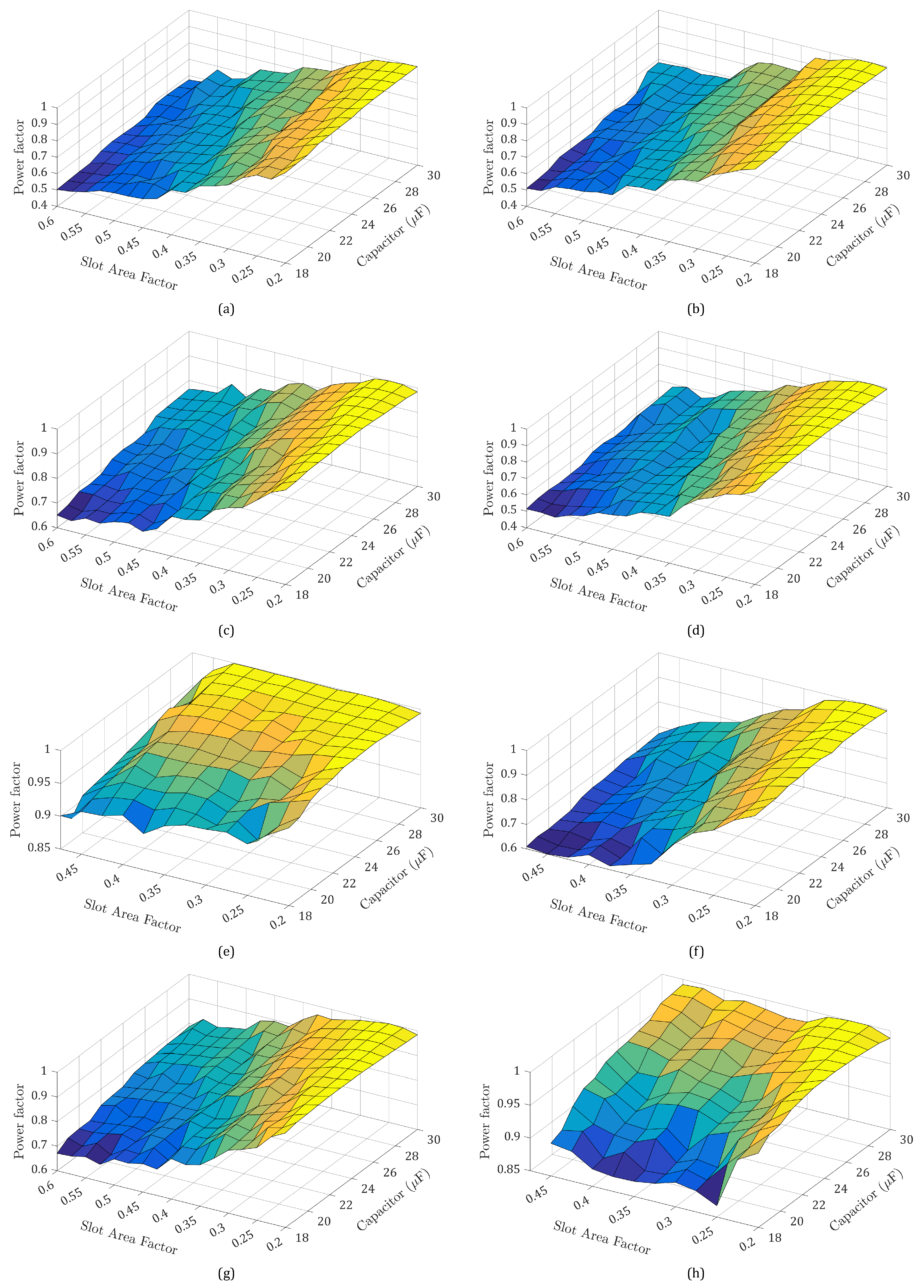
- The efficiency of the SPIM with quadrangular bars and = 25 F is equal to 84.33%, and it is the maximum one among the highest recorded values. The minimum one (i.e., 83.91%) corresponds to the SPIM with = 26 F and bars of pent shape. The difference between the above efficiency values is equal to 0.42%. It comes as a result of the fact that the specific motor with quadrangular bars present lower stator windings copper losses and rotor ohmic losses. For given , the efficiency of the SPIMs with different rotor bar geometry exhibits considerable variation. The difference between the minimum and maximum efficiency values is lower than 0.5% when 26 F. The respective difference lies between 0.55% and 0.98% as the varies from 18 F to 25 F. This is due to the variation of: (i) the stator windings copper losses, (ii) the rotor ohmic losses, and (iii) the iron losses. Further information about the effect of the rotor bar’s shape on the rotor ohmic losses is given in Section 8. Generally-speaking, the efficiency ranges from 82.82% to 84.33%. The maximum value of the analyzed SPIMs is quite close to that of IE4 efficiency class (i.e., 85.7%).
- (c)
- The motors with bars of rectangular and pent shape have the lowest stator and rotor core losses.
- (d)
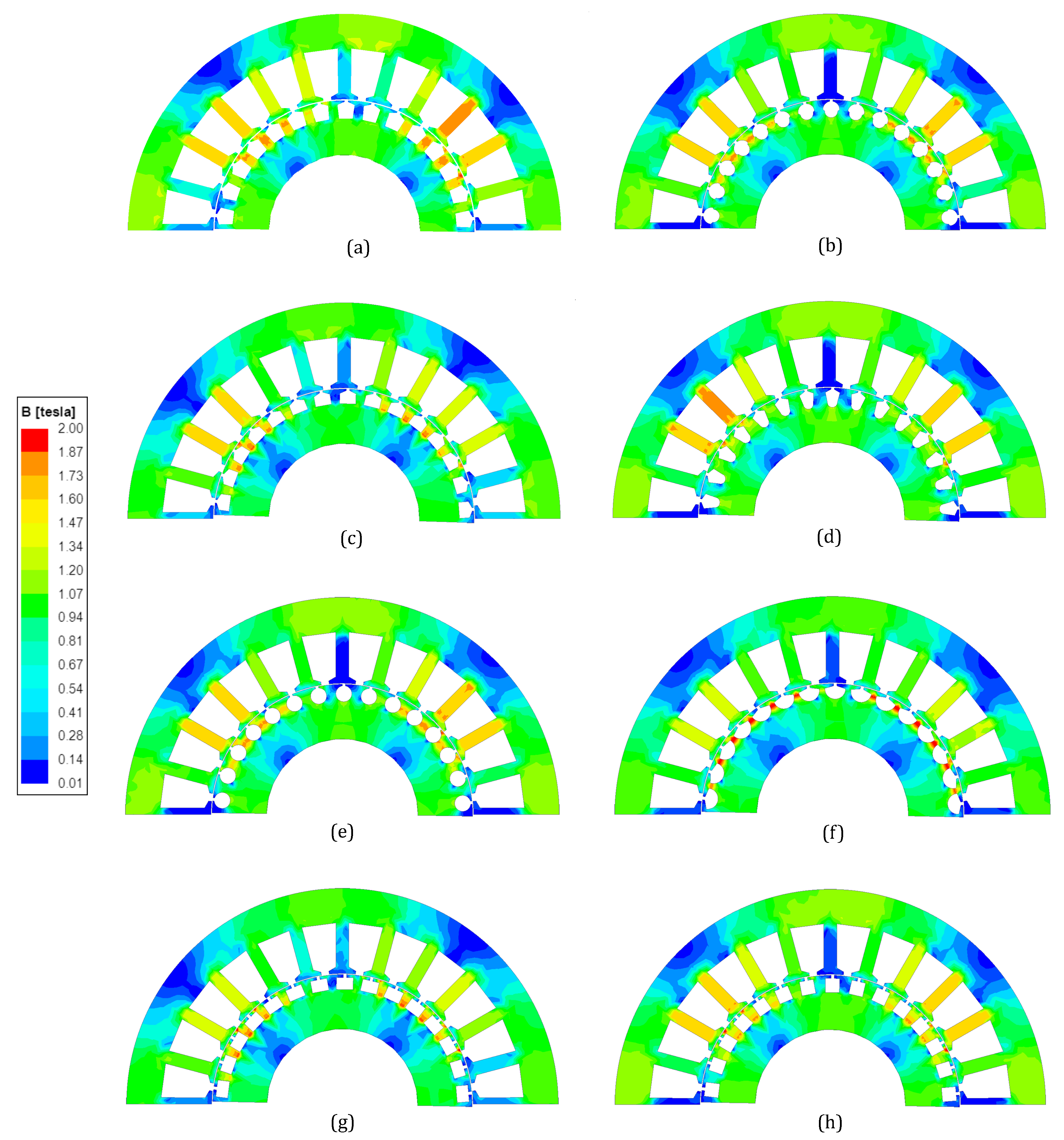
- No severe magnetic saturation is observed at the SPIM’s stator and rotor teeth. The only exceptions are the models with bars of drop shape, where the magnetic flux density at the rotor’s teeth is higher than 1.70 T.
- (e)
- The angle between the currents of the main and auxiliary winding () augments as a higher value is assigned to . Only a few exceptions exist at the final SPIMs. The shift angle is close enough or equal to the ideal value (i.e., 90 electrical degrees) for the whole variation range of . The achievement of the ideal angle value is crucial for two reasons. The first one refers to the generation of circular rotating fields. Unlike the three-phase IMs, circular rotating fields are not inherently formed at the capacitor-run SPIMs. Rotating fields with elliptical shape are produced due to the backward fields, especially when the shift angle is far away from 90 electrical degrees. When the above happens, the motor’s performance is substantially degraded. The second reason is related to the maximization of the SPIM’s delivered output torque for given absorbed current. A high value of is preferable at the machines with pent and rectangular bars, aiming for the currents shift angle to approach the ideal value. The shift angle becomes higher than 90 electrical degrees when trapezoidal bars are incorporated and 23 F. With respect to the ideal angle, a lower value is preferable rather than a higher one. In the latter case, the SPIM’s operation may be noisy due to the torque fluctuations and the vibrations.
- (f)
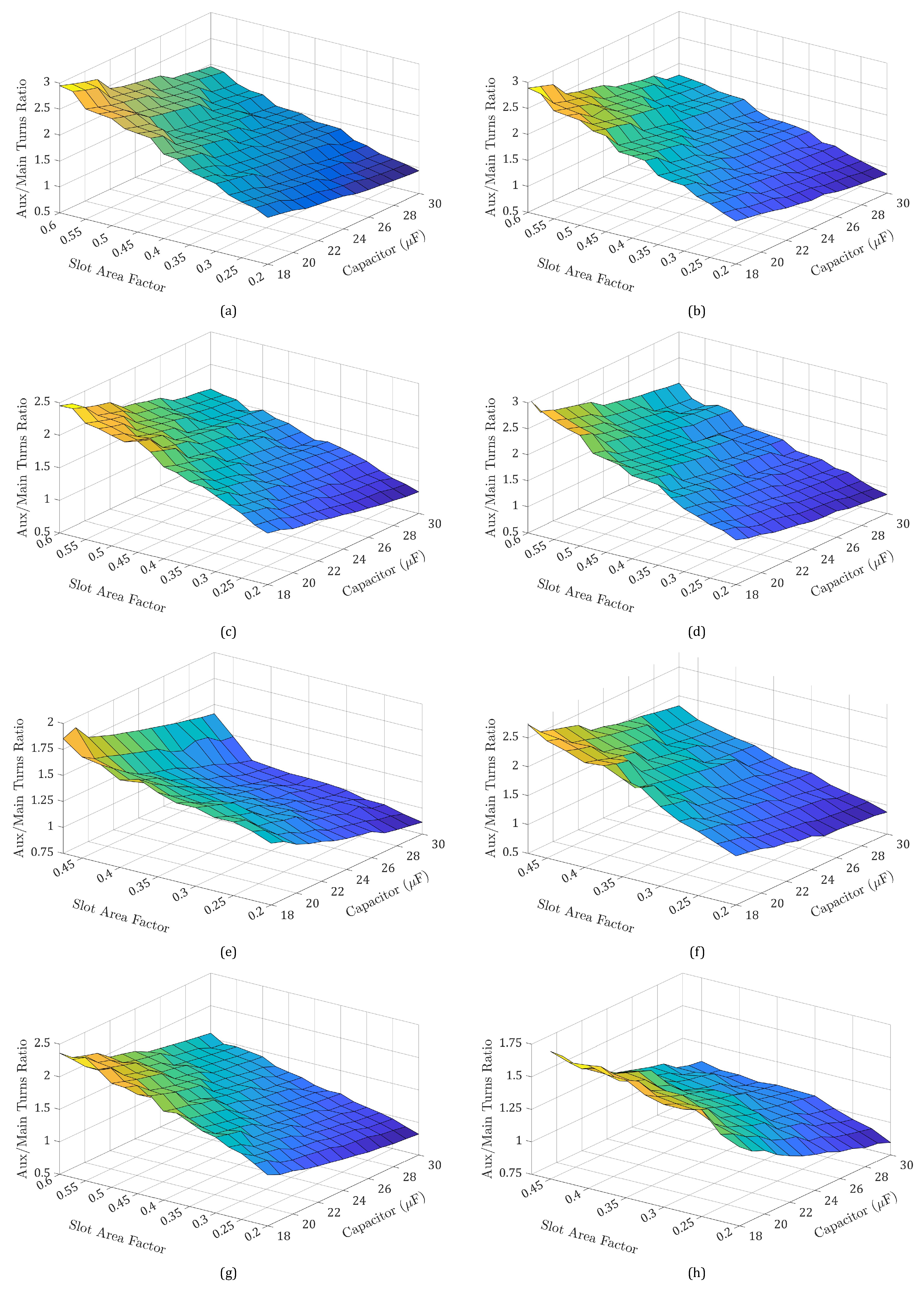
- A necessary condition for the SPIM’s torque ripple minimization (besides the slotting and higher-order current harmonics effect reduction) is the ratio of the main to auxiliary winding current amplitudes (/) to be equal to the turns ratio. This condition is fulfilled, as the value of the / ratio is almost equal to the turns ratio.
- (g)
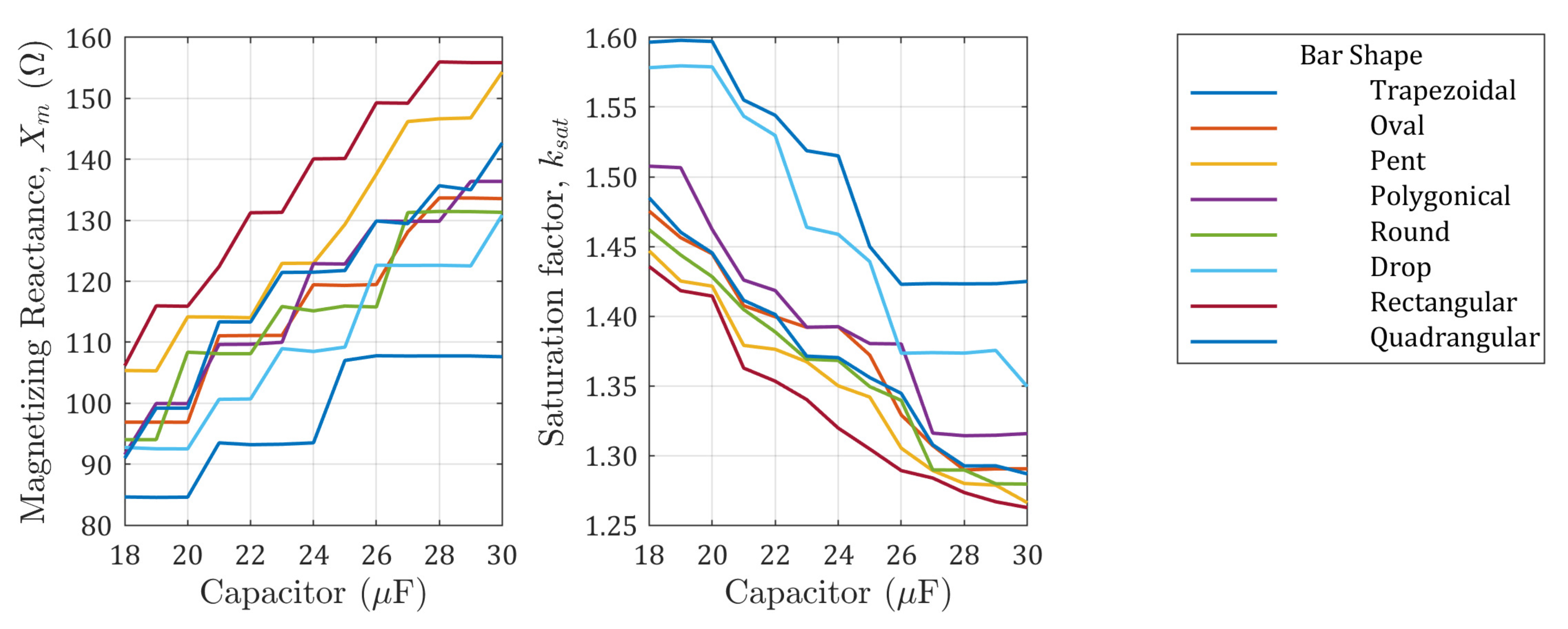
- The breakdown torque () declines when a higher capacitance is employed. At the commercial capacitor-run SPIMs with the same output power ratings and specifications, the breakdown to nominal torque ratio (/) ratio is usually equal to 1.80. This requirement is satisfied at the obtained SPIMs. The minimum (when = 30 F) and the maximum (when = 18 F) values of the ratio are tabulated in Table 11. From the data given there, it is concluded that the SPIMs with trapezoidal bars are advantageous. For all the machines, it was found that the breakdown torque is proportional to the square of the main winding turns number. Furthermore, the is almost inversely proportional to the sum of: (i) the main winding resistance, (ii) the main winding leakage reactance, (iii) the rotor squirrel-cage resistance, and (iv) the rotor-squirrel-cage leakage reactance.
8. Further Considerations
8.1. Effect of Capacitance on Magnetizing Reactance and Magnetic Saturation Factor
8.2. Impact of Skin Effect on the Rotor Bars Resistance and Leakage Reactance
8.3. Effect of Bar’s Shape on the Rotor Ohmic Losses
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wang, X.; Zhong, H.; Yang, Y.; Mu, X. Study of a Novel Energy Efficient Single-Phase Induction Motor with Three Series-Connected Windings and Two Capacitors. IEEE Trans. Energy Convers. 2010, 25, 433–440. [Google Scholar] [CrossRef]
- Chasiotis, I.D.; Karnavas, Y.L. On the Design and Manufacturing of Small Single Phase Induction Motors toward Super Premium Efficiency Standards. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Göthenburg, Sweden, 23–26 August 2020; pp. 2321–2327. [Google Scholar] [CrossRef]
- Lee, K.S.; Lee, S.H.; Park, J.H.; Kim, J.M.; Choi, J.Y. Experimental and Analytical Study of Single-Phase Squirrel-Cage Induction Motor Considering End-Ring Porosity Rate. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Yun, J.; Lee, S.B. Influence of Aluminum Die-Cast Rotor Porosity on the Efficiency of Induction Machines. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Chasiotis, I.D.; Karnavas, Y.L. Investigation on Single Phase Induction Motor Efficiency and Starting Capability Enhancement by Incorporating Magnesium Alloys Rotors. Int. J. Sci. Res. Mach. Technol. Mater. 2020, 14, 16–19. [Google Scholar]
- Liang, D.; Zhou, V. Recent Market and Technical Trends in Copper Rotors for High-Efficiency Induction Motors. In Proceedings of the International Power Electronics Conference (IPEC-Niigata 2018—ECCE Asia), Niigara, Japan, 20–24 May 2018; pp. 1943–1948. [Google Scholar] [CrossRef]
- Ferreira, F.J.T.E.; Baoming, G.; de Almeida, A.T. Reliability and Operation of High-Efficiency Induction Motors. IEEE Trans. Ind. Appl. 2016, 52, 4628–4637. [Google Scholar] [CrossRef]
- Sarac, V.; Atanasova-Pacemska, T. Multiparameter Analysis for Efficiency Improvement of Single-Phase Capacitor Motor. Math. Probl. Eng. 2019, 2019, 5131696. [Google Scholar] [CrossRef] [Green Version]
- De Almeida, A.T.; Ferreira, F.J.T.E.; Duarte, A.Q. Technical and Economical Considerations on Super High-Efficiency Three-Phase Motors. IEEE Trans. Ind. Appl. 2014, 50, 1274–1285. [Google Scholar] [CrossRef]
- Office of Energy Efficiency & Renewable Energy. Energy Conservation Program: Energy Conservation Standards for Small Electric Motors; Final Rule; Technical Report 86 FR 4885; U.S. Department of Energy: Washington, DC, USA, 2010.
- de Almeida, A.T.; Ferreira, F.J.T.E.; Baoming, G. Beyond Induction Motors?Technology Trends to Move Up Efficiency. IEEE Trans. Ind. Appl. 2014, 50, 2103–2114. [Google Scholar] [CrossRef]
- CLC/TC 2 Rotating machinery Technical Committee. Rotating Electrical Machines—Part 30-1: Efficiency Classes of Line Operated AC Motors (IE Code); Technical Report EN 60034-30-1; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2014. [Google Scholar]
- Pillay, P.; Al-Badri, M.; Angers, P.; Desai, C. A New Stray-Load Loss Formula for Small and Medium-Sized Induction Motors. IEEE Trans. Energy Convers. 2016, 31, 1221–1227. [Google Scholar] [CrossRef]
- Bacher, J.; Waldhart, F.; Muetze, A. 3-D FEM Calculation of Electromagnetic Properties of Single-Phase Induction Machines. IEEE Trans. Energy Convers. 2015, 30, 142–149. [Google Scholar] [CrossRef]
- Kurt, M.S.; Fenercioglu, A. Rotor Slot Distance Effects on Output Parameters in Single Phase Induction Motors. Hittite J. Sci. Eng. 2018, 5, 31–35. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.J.; Im, S.H.; Um, D.Y.; Park, G.S. A Design of Rotor Bar for Improving Starting Torque by Analyzing Rotor Resistance and Reactance in Squirrel Cage Induction Motor. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Yousefian, M.; Mosaddegh, H.R.; Zarchi, H.A. Optimal Design of a Single-Phase Two-Value Capacitor Induction Motor with Fan Load. In Proceedings of the Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 8–10 May 2018; pp. 1298–1303. [Google Scholar] [CrossRef]
- Mach, M.; Cipin, R.; Toman, M.; Hajek, V. Impact of Number of Rotor Slots on Performance of Three-Phase and Single-Phase Induction Machines. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Heo, C.G.; Kim, H.M.; Park, G.S. A Design of Rotor Bar Inclination in Squirrel Cage Induction Motor. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Hosseini, S.M. Performance improvement of capacitor-run single-phase induction motors by non-orthogonal armature windings. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Anacapri, Italy, 22–24 June 2016; pp. 1336–1341. [Google Scholar] [CrossRef]
- Elkholy, M.M. Optimal Energy Saving for Variable Speed Single Phase Induction Motor Drives. In Proceedings of the 19th International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 753–764. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Diab, M.S.; Ahmed, S.; Massoud, A.M. A New Single Tooth Winding Layout for a Single-Phase Induction Motor with Segmented Stator. In Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society IECON, Yokohama, Japan, 9–12 November 2015; pp. 102–107. [Google Scholar] [CrossRef]
- Mallard, V.; Parent, G.; Demian, C.; Brudny, J.F.; Delamotte, A. Increasing the Energy Efficiency of Induction Machines by the Use of Grain-Oriented Magnetic Materials and Die Casting Copper Squirrel Cage in the Rotor. IEEE Trans. Ind. Appl. 2019, 55, 1280–1289. [Google Scholar] [CrossRef]
- Liu, Y.; Han, P.; Bazzi, A.M. A Comparison of Rotor Bar Material of Squirrel-Cage Induction Machines for Efficiency Enhancement Purposes. In Proceedings of the 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Szab?, L. A Survey on the Efficiency Improve of Electrical Machines. In Proceedings of the 26th International Workshop on Electric Drives: Improvement in Efficiency of Electric Drives (IWED), Moscow, Russia, 30 January–2 February 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Cavagnino, A.; Vaschetto, S.; Ferraris, L.; Gmyrek, Z.; Agamloh, E.B.; Bramerdorfer, G. Striving for the Highest Efficiency Class With Minimal Impact for Induction Motor Manufacturers. IEEE Trans. Ind. Appl. 2020, 56, 194–204. [Google Scholar] [CrossRef]
- Um, D.Y.; Park, G.S. Determination Scheme of Stator Parameters for Making Rotating Fields Circular in a Single-Phase Induction Motor. IEEE Trans. Magn. 2020, 56, 1–5. [Google Scholar] [CrossRef]
- Chasiotis, I.D.; Karnavas, Y.L. A Novel Design Methodology for the Compliance of Single Phase Induction Motors with Recent Industrial Premium Efficiency Standards. Eng. Rep. 2020, 2, e12265. [Google Scholar] [CrossRef]
- Karnavas, Y.L.; Chasiotis, I.D. Design and Manufacturing of a Single-Phase Induction Motor: A Decision Aid Tool Approach. Int. Trans. Electr. Energy Syst. 2017, 27, e2357. [Google Scholar] [CrossRef]
- Boldea, I.; Nasar, S.A. The Induction Machines Design Handbook, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Zhao, H.; Guo, X.; Eldeeb, H.H.; Xu, G.; Zhan, Y.; Mohammed, O.A. Design and Analysis of Inverter-Fed High-Speed Induction Motors with Closed Rotor Slots Taking Enclosure Effect into Account. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 729–733. [Google Scholar] [CrossRef]
- Donolo, P.; Bossio, G.; De Angelo, C. Analysis of Voltage Unbalance Effects on Induction Motors with Open and Closed Slots. Energy Convers. Manag. 2011, 52, 2024–2030. [Google Scholar] [CrossRef]
- Yang, W.; Huang, C.; Zhang, Q. Optimization of Squirrel-Cage Rotor for Amorphous Asynchronous Motor. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 2107–2110. [Google Scholar] [CrossRef]
- Makhetha, E.; Muteba, M.; Nicolae, D.V. Effect of Rotor bar Shape and Stator Slot Opening on the Performance of Three Phase Squirrel Cage Induction Motors with Broken Rotor Bars. In Proceedings of the Southern African Universities Power Engineering Conference/Robotics and Mechatronics/Pattern Recognition Association of South Africa (SAUPEC/RobMech/PRASA), Bloemfontein, South Africa, 28–30 January 2019; pp. 463–468. [Google Scholar] [CrossRef]
- Maloma, E.; Muteba, M.; Nicolae, D.V. Effect of Rotor Bar Shape on the Performance of Three Phase Induction Motors with Broken Rotor Bars. In Proceedings of the International Conference on Optimization of Electrical and Electronic Equipment (OPTIM) & 2017 Intl Aegean Conference on Electrical Machines and Power Electronics (ACEMP), Brasov, Romania, 25–27 May 2017; pp. 364–369. [Google Scholar] [CrossRef]
- Nardo, M.D.; Marfoli, A.; Degano, M.; Gerada, C.; Chen, W. Rotor Design Optimization of Squirrel Cage Induction Motor—Part II: Results Discussion. IEEE Trans. Energy Convers. 2021, 36, 1280–1288. [Google Scholar] [CrossRef]
- Lee, G.; Min, S.; Hong, J.P. Optimal Shape Design of Rotor Slot in Squirrel-Cage Induction Motor Considering Torque Characteristics. IEEE Trans. Magn. 2013, 49, 2197–2200. [Google Scholar] [CrossRef]
- Marfoli, A.; Nardo, M.D.; Degano, M.; Gerada, C.; Chen, W. Rotor Design Optimization of Squirrel Cage Induction Motor—Part I: Problem Statement. IEEE Trans. Energy Convers. 2021, 36, 1271–1279. [Google Scholar] [CrossRef]
- Sorgdrager, A.J.; Wang, R.J.; Grobler, A.J. Transient Performance Investigation and Taguchi Optimization of a Line-Start PMSM. In Proceedings of the 2015 IEEE International Electric Machines Drives Conference (IEMDC), Coeur d’ Alene, ID, USA, 10–13 May 2015; pp. 590–595. [Google Scholar] [CrossRef]
- Sorgdrager, A.J.; Wang, R.J.; Grobler, A.J. Multiobjective Design of a Line-Start PM Motor Using the Taguchi Method. IEEE Trans. Ind. Appl. 2018, 54, 4167–4176. [Google Scholar] [CrossRef]
- Lyskawinski, W.; Jedryczka, C.; Szelag, W. Influence of Magnet and Cage Shape on Properties of the Line Start Synchronous Motor with Powder Hybrid Rotor. In Proceedings of the International Symposium on Electrical Machines (SME), Naleczow, Poland, 18–21 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, W.; Luo, Y.; Zhao, H. Influences of Rotor Bar Design on the Starting Performance of Line-Start Permanent Magnet Synchronous Motor. In Proceedings of the 6th International Conference on Electromagnetic Field Problems and Applications (ICEF), Dalian, China, 19–21 June 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Kersten, A.; Liu, Y.; Pehrman, D.; Thiringer, T. Rotor Design of Line-Start Synchronous Reluctance Machine with Round Bars. IEEE Trans. Ind. Appl. 2019, 55, 3685–3696. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Type |
|---|---|
| Rated output power, | 746 W |
| Rated output torque, | ≥4.8 Nm |
| Rated speed, | ≥1400 rpm |
| Number of poles, | 4 |
| Supply voltage, | 230 V |
| Supply frequency, f | 50 Hz |
| Line current at nominal operation, | ≤5.0 A |
| Efficiency at nominal operation, | ≥82.5% |
| Power factor at nominal operation, | ≥0.9 |
| Starting to nominal torque ratio, / | ≥0.35 |
| Starting to nominal current ratio, / | ≤8.0 |
| Main/aux. winding wire current density, / | ≤3.50 A/mm |
| Net mass, M | ≤14.0 kg |
| Mounting | Foot |
| Insulation class | B |
| Design type | N |
| Efficiency Class | Value (Minimum) | |
|---|---|---|
| Standard Efficiency | IE1 | 72.1% |
| High Efficiency | IE2 | 79.6% |
| Premium Efficiency | IE3 | 82.5% |
| Super Premium Efficiency | IE4 | 85.7% |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.02 | 0.951 | 1.400 | 504 | 360 | 29.46 | 7.17 | 12.14 | 88.63 | 1.460 |
| 19 | 82.94 | 0.956 | 1.356 | 488 | 360 | 29.43 | 7.18 | 12.08 | 90.11 | 1.401 |
| 20 | 82.82 | 0.958 | 1.311 | 472 | 360 | 29.39 | 7.18 | 12.03 | 92.02 | 1.368 |
| 21 | 83.31 | 0.978 | 1.239 | 456 | 368 | 27.91 | 7.01 | 11.94 | 90.43 | 1.269 |
| 22 | 83.53 | 0.980 | 1.196 | 440 | 368 | 27.87 | 7.03 | 11.80 | 92.50 | 1.232 |
| 23 | 83.43 | 0.983 | 1.174 | 432 | 368 | 27.84 | 7.04 | 11.86 | 93.88 | 1.184 |
| 24 | 83.35 | 0.985 | 1.130 | 416 | 368 | 27.80 | 7.03 | 11.82 | 95.41 | 1.161 |
| 25 | 83.68 | 0.995 | 1.042 | 400 | 384 | 26.18 | 6.73 | 11.78 | 93.94 | 1.094 |
| 26 | 84.09 | 0.999 | 1.021 | 392 | 384 | 25.42 | 6.58 | 11.74 | 93.86 | 1.035 |
| 27 | 84.01 | 0.999 | 1.000 | 384 | 384 | 25.39 | 6.56 | 11.72 | 95.06 | 1.002 |
| 28 | 83.93 | 1.000 | 0.958 | 368 | 384 | 25.35 | 6.55 | 11.68 | 96.49 | 0.981 |
| 29 | 83.84 | 1.000 | 0.938 | 360 | 384 | 25.31 | 6.54 | 11.65 | 97.75 | 0.957 |
| 30 | 83.76 | 1.000 | 0.938 | 360 | 384 | 25.28 | 6.52 | 11.64 | 98.62 | 0.917 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.53 | 0.972 | 1.326 | 488 | 368 | 27.25 | 6.82 | 12.05 | 84.51 | 1.42 |
| 19 | 83.45 | 0.975 | 1.283 | 472 | 368 | 26.91 | 6.75 | 12.00 | 86.41 | 1.38 |
| 20 | 83.37 | 0.977 | 1.239 | 456 | 368 | 26.84 | 6.74 | 11.94 | 88.08 | 1.33 |
| 21 | 83.51 | 0.990 | 1.167 | 448 | 384 | 25.33 | 6.46 | 11.92 | 86.39 | 1.23 |
| 22 | 83.99 | 0.995 | 1.125 | 432 | 384 | 24.82 | 6.39 | 11.85 | 86.80 | 1.18 |
| 23 | 83.92 | 0.996 | 1.083 | 416 | 384 | 24.58 | 6.34 | 11.81 | 88.57 | 1.15 |
| 24 | 83.94 | 0.999 | 1.041 | 408 | 392 | 24.31 | 6.29 | 11.77 | 87.80 | 1.09 |
| 25 | 83.71 | 0.998 | 1.020 | 400 | 392 | 23.44 | 6.05 | 11.75 | 90.92 | 1.05 |
| 26 | 84.18 | 0.999 | 0.980 | 384 | 392 | 23.35 | 6.04 | 11.70 | 90.66 | 1.03 |
| 27 | 83.99 | 0.998 | 0.940 | 376 | 400 | 21.63 | 5.59 | 11.54 | 89.08 | 0.99 |
| 28 | 83.97 | 0.995 | 0.902 | 368 | 408 | 20.91 | 5.39 | 11.52 | 88.65 | 0.94 |
| 29 | 83.90 | 0.994 | 0.882 | 360 | 408 | 20.87 | 5.36 | 11.50 | 89.90 | 0.92 |
| 30 | 84.11 | 0.992 | 0.863 | 352 | 408 | 20.83 | 5.36 | 11.47 | 91.57 | 0.89 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.63 | 0.983 | 1.292 | 496 | 384 | 24.62 | 6.24 | 12.07 | 81.35 | 1.39 |
| 19 | 83.56 | 0.986 | 1.250 | 480 | 384 | 24.59 | 6.25 | 12.02 | 82.97 | 1.33 |
| 20 | 83.72 | 0.993 | 1.184 | 464 | 392 | 23.44 | 6.01 | 11.94 | 82.09 | 1.27 |
| 21 | 83.65 | 0.995 | 1.143 | 448 | 392 | 23.40 | 6.01 | 11.90 | 83.73 | 1.23 |
| 22 | 83.74 | 0.996 | 1.122 | 440 | 392 | 23.37 | 6.01 | 11.88 | 86.10 | 1.18 |
| 23 | 83.69 | 1.000 | 1.060 | 424 | 400 | 21.63 | 5.58 | 11.69 | 83.91 | 1.12 |
| 24 | 83.62 | 1.000 | 1.040 | 416 | 400 | 21.59 | 5.56 | 11.65 | 85.73 | 1.09 |
| 25 | 83.88 | 0.999 | 0.980 | 400 | 408 | 20.77 | 5.37 | 11.61 | 86.26 | 1.06 |
| 26 | 83.91 | 0.997 | 0.942 | 392 | 416 | 19.88 | 5.13 | 11.59 | 84.88 | 0.99 |
| 27 | 83.87 | 0.993 | 0.906 | 384 | 424 | 19.03 | 4.89 | 11.57 | 84.17 | 0.96 |
| 28 | 83.84 | 0.991 | 0.868 | 368 | 424 | 18.99 | 4.86 | 11.53 | 85.35 | 0.94 |
| 29 | 83.75 | 0.991 | 0.849 | 360 | 424 | 18.95 | 4.85 | 11.50 | 87.35 | 0.93 |
| 30 | 83.67 | 0.983 | 0.833 | 360 | 432 | 18.15 | 4.61 | 11.49 | 85.88 | 0.87 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.17 | 0.964 | 1.356 | 488 | 360 | 27.38 | 6.77 | 12.05 | 86.22 | 1.44 |
| 19 | 83.48 | 0.980 | 1.283 | 472 | 368 | 26.04 | 6.57 | 11.98 | 84.78 | 1.34 |
| 20 | 83.40 | 0.983 | 1.239 | 456 | 368 | 26.00 | 6.57 | 11.93 | 86.48 | 1.29 |
| 21 | 83.93 | 0.993 | 1.146 | 440 | 384 | 24.53 | 6.29 | 11.88 | 85.58 | 1.23 |
| 22 | 83.85 | 0.994 | 1.104 | 424 | 384 | 24.49 | 6.29 | 11.83 | 87.50 | 1.20 |
| 23 | 83.79 | 0.997 | 1.083 | 416 | 384 | 23.82 | 6.14 | 11.80 | 87.75 | 1.14 |
| 24 | 84.01 | 1.000 | 1.020 | 400 | 392 | 23.70 | 6.12 | 11.74 | 86.59 | 1.10 |
| 25 | 84.22 | 1.000 | 1.000 | 392 | 392 | 22.70 | 5.88 | 11.71 | 88.05 | 1.05 |
| 26 | 83.85 | 1.000 | 1.000 | 384 | 384 | 22.66 | 5.87 | 11.69 | 92.45 | 1.04 |
| 27 | 83.81 | 0.998 | 0.940 | 376 | 400 | 20.99 | 5.41 | 11.53 | 88.48 | 0.98 |
| 28 | 83.74 | 0.997 | 0.920 | 368 | 400 | 20.95 | 5.40 | 11.49 | 89.95 | 0.96 |
| 29 | 83.79 | 0.992 | 0.882 | 360 | 408 | 20.24 | 5.19 | 11.49 | 88.97 | 0.90 |
| 30 | 84.00 | 0.991 | 0.863 | 352 | 408 | 20.20 | 5.18 | 11.46 | 90.65 | 0.88 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.38 | 0.968 | 1.348 | 496 | 368 | 27.00 | 6.74 | 12.08 | 85.29 | 1.43 |
| 19 | 83.30 | 0.972 | 1.304 | 480 | 368 | 26.96 | 6.72 | 12.05 | 86.92 | 1.37 |
| 20 | 83.58 | 0.986 | 1.229 | 472 | 384 | 25.43 | 6.46 | 11.96 | 85.43 | 1.29 |
| 21 | 83.96 | 0.992 | 1.167 | 448 | 384 | 24.72 | 6.34 | 11.91 | 85.76 | 1.22 |
| 22 | 83.88 | 0.994 | 1.125 | 432 | 384 | 24.69 | 6.33 | 11.87 | 87.43 | 1.19 |
| 23 | 83.97 | 0.999 | 1.082 | 424 | 392 | 23.54 | 6.08 | 11.83 | 86.31 | 1.12 |
| 24 | 83.84 | 0.999 | 1.061 | 416 | 392 | 23.50 | 6.07 | 11.79 | 88.43 | 1.10 |
| 25 | 83.77 | 0.999 | 1.020 | 400 | 392 | 23.46 | 6.05 | 11.75 | 89.70 | 1.06 |
| 26 | 84.03 | 1.000 | 1.000 | 392 | 392 | 23.42 | 6.07 | 11.73 | 91.09 | 1.01 |
| 27 | 83.95 | 0.998 | 0.941 | 384 | 408 | 20.98 | 5.42 | 11.56 | 88.15 | 0.98 |
| 28 | 83.88 | 0.997 | 0.902 | 368 | 408 | 20.94 | 5.40 | 11.53 | 89.59 | 0.95 |
| 29 | 83.81 | 0.995 | 0.882 | 360 | 408 | 20.91 | 5.38 | 11.50 | 90.82 | 0.93 |
| 30 | 84.01 | 0.994 | 0.863 | 352 | 408 | 20.86 | 5.38 | 11.48 | 92.48 | 0.91 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.37 | 0.965 | 1.333 | 480 | 360 | 28.06 | 6.97 | 12.06 | 86.12 | 1.44 |
| 19 | 83.31 | 0.970 | 1.311 | 472 | 360 | 28.02 | 6.97 | 12.02 | 87.48 | 1.37 |
| 20 | 83.21 | 0.973 | 1.267 | 456 | 360 | 27.69 | 6.92 | 11.96 | 89.29 | 1.33 |
| 21 | 83.80 | 0.986 | 1.196 | 440 | 368 | 26.45 | 6.74 | 11.89 | 88.62 | 1.25 |
| 22 | 83.58 | 0.987 | 1.152 | 424 | 368 | 26.41 | 6.73 | 11.85 | 90.67 | 1.21 |
| 23 | 83.83 | 0.996 | 1.083 | 416 | 384 | 25.98 | 6.68 | 11.82 | 88.97 | 1.15 |
| 24 | 83.78 | 0.997 | 1.062 | 408 | 384 | 24.92 | 6.43 | 11.79 | 90.04 | 1.09 |
| 25 | 83.35 | 0.988 | 1.042 | 400 | 384 | 24.89 | 6.32 | 11.74 | 89.73 | 1.08 |
| 26 | 84.25 | 1.000 | 0.980 | 384 | 392 | 23.05 | 5.99 | 11.71 | 89.47 | 1.01 |
| 27 | 84.18 | 0.999 | 0.959 | 376 | 392 | 23.01 | 5.97 | 11.68 | 90.77 | 0.98 |
| 28 | 84.11 | 0.998 | 0.939 | 368 | 392 | 22.97 | 5.95 | 11.64 | 92.16 | 0.96 |
| 29 | 84.04 | 0.997 | 0.918 | 360 | 392 | 22.94 | 5.93 | 11.63 | 93.07 | 0.91 |
| 30 | 84.11 | 0.993 | 0.880 | 352 | 400 | 21.26 | 5.47 | 11.47 | 91.99 | 0.88 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.64 | 0.984 | 1.286 | 504 | 392 | 25.30 | 6.42 | 12.16 | 83.71 | 1.39 |
| 19 | 83.77 | 0.993 | 1.200 | 480 | 400 | 23.33 | 5.98 | 11.94 | 83.04 | 1.34 |
| 20 | 83.72 | 0.995 | 1.160 | 464 | 400 | 23.31 | 5.98 | 11.90 | 84.51 | 1.28 |
| 21 | 83.75 | 0.998 | 1.098 | 448 | 408 | 22.52 | 5.80 | 11.85 | 84.80 | 1.25 |
| 22 | 84.01 | 1.000 | 1.058 | 440 | 416 | 21.56 | 5.60 | 11.82 | 83.77 | 1.16 |
| 23 | 84.04 | 1.000 | 1.019 | 424 | 416 | 21.52 | 5.58 | 11.77 | 85.60 | 1.14 |
| 24 | 84.05 | 1.000 | 0.981 | 416 | 424 | 20.53 | 5.31 | 11.74 | 84.48 | 1.08 |
| 25 | 83.98 | 0.999 | 0.962 | 408 | 424 | 20.49 | 5.30 | 11.71 | 86.25 | 1.06 |
| 26 | 83.94 | 0.995 | 0.907 | 392 | 432 | 19.64 | 5.06 | 11.67 | 85.62 | 1.02 |
| 27 | 84.16 | 0.993 | 0.889 | 384 | 432 | 19.60 | 5.05 | 11.65 | 87.06 | 0.98 |
| 28 | 84.09 | 0.989 | 0.855 | 376 | 440 | 18.98 | 4.86 | 11.64 | 86.92 | 0.95 |
| 29 | 84.06 | 0.986 | 0.836 | 368 | 440 | 18.95 | 4.84 | 11.62 | 87.76 | 0.91 |
| 30 | 84.00 | 0.983 | 0.818 | 360 | 440 | 18.91 | 4.82 | 11.59 | 88.96 | 0.89 |
| (F) | % | a | (A) | / | M (kg) | (deg) | / | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 18 | 83.29 | 0.963 | 1.356 | 488 | 360 | 28.60 | 7.07 | 12.07 | 86.52 | 1.44 |
| 19 | 83.60 | 0.979 | 1.283 | 472 | 368 | 27.06 | 6.83 | 12.00 | 85.20 | 1.34 |
| 20 | 83.52 | 0.982 | 1.239 | 456 | 368 | 27.02 | 6.83 | 11.95 | 86.89 | 1.30 |
| 21 | 84.02 | 0.992 | 1.146 | 440 | 384 | 25.51 | 6.55 | 11.90 | 86.23 | 1.24 |
| 22 | 84.08 | 0.996 | 1.104 | 424 | 384 | 24.80 | 6.40 | 11.84 | 86.45 | 1.19 |
| 23 | 84.20 | 1.000 | 1.061 | 416 | 392 | 23.67 | 6.13 | 11.81 | 85.01 | 1.12 |
| 24 | 84.13 | 1.000 | 1.041 | 408 | 392 | 23.63 | 6.12 | 11.77 | 86.89 | 1.09 |
| 25 | 84.33 | 1.000 | 1.000 | 392 | 392 | 23.59 | 6.12 | 11.73 | 88.58 | 1.06 |
| 26 | 84.11 | 1.000 | 0.960 | 384 | 400 | 21.85 | 5.66 | 11.57 | 87.20 | 1.01 |
| 27 | 84.05 | 0.998 | 0.940 | 376 | 400 | 21.82 | 5.64 | 11.54 | 88.36 | 0.97 |
| 28 | 84.02 | 0.995 | 0.902 | 368 | 408 | 21.08 | 5.44 | 11.52 | 88.47 | 0.95 |
| 29 | 83.93 | 0.993 | 0.882 | 360 | 408 | 21.05 | 5.41 | 11.51 | 89.37 | 0.91 |
| 30 | 84.15 | 0.988 | 0.846 | 352 | 416 | 20.15 | 5.16 | 11.48 | 89.31 | 0.89 |
| Rotor Bar Shape | min. / | max. / |
|---|---|---|
| ( = 30 F) | ( = 18 F) | |
| Trapezoidal | 2.94 | 3.22 |
| Oval | 2.47 | 2.99 |
| Pent | 2.22 | 2.77 |
| Polygonical | 2.42 | 3.05 |
| Round | 2.47 | 3.01 |
| Drop | 2.68 | 3.10 |
| Rectangular | 2.27 | 2.83 |
| Quadrangular | 2.40 | 3.14 |
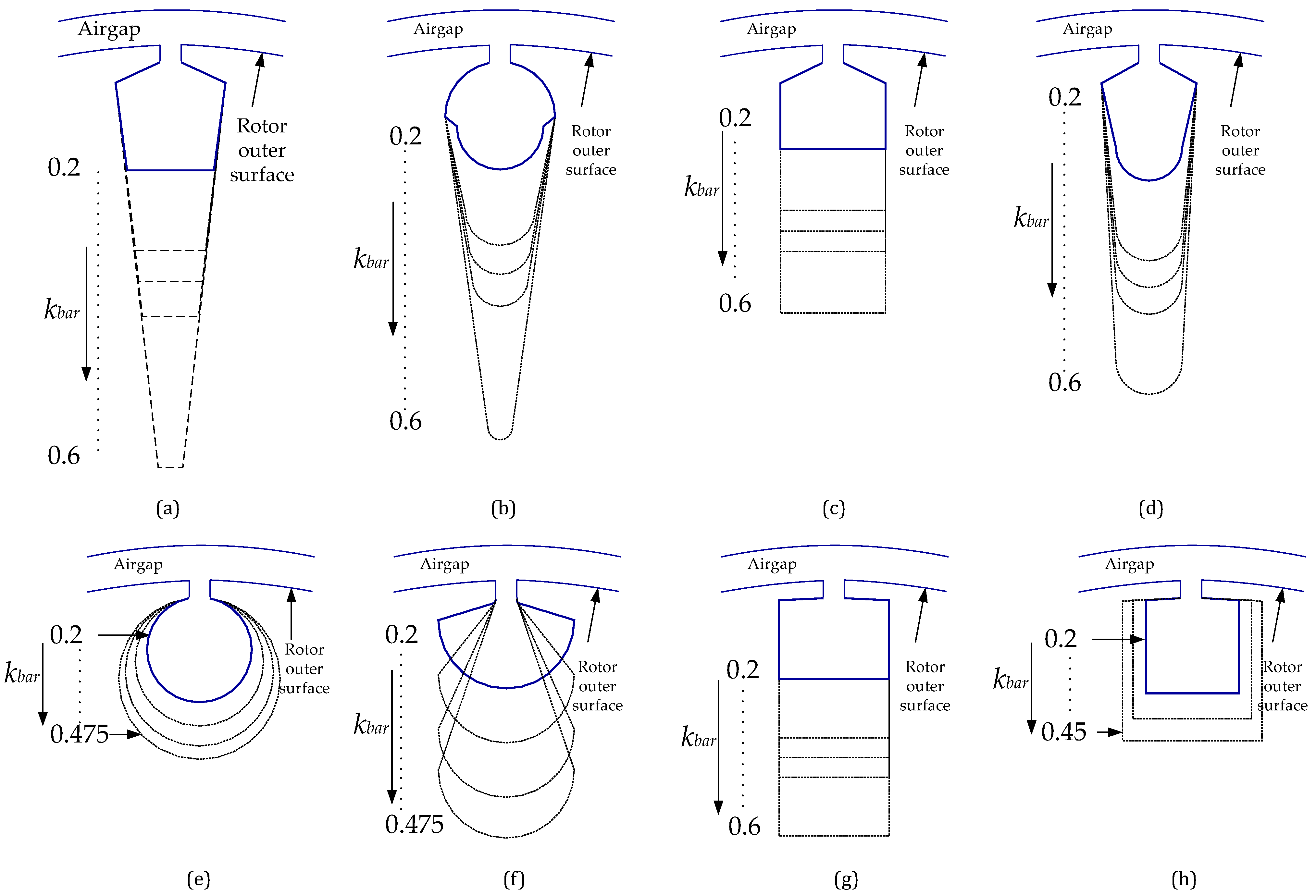
| Bar Shape | Trapezoidal | Oval | Pent | Polygonical | |
|---|---|---|---|---|---|
| 0.2 …0.6 | 0.2 …0.6 | 0.2 …0.6 | 0.2 …0.6 | ||
| 18 F | 21.79 …6.70 | 24.67 …6.84 | 28.49 …11.46 | 24.39 …6.30 | |
| 20 F | 21.83 …7.11 | 24.56 …7.22 | 29.82 …11.98 | 25.64 …7.79 | |
| 22 F | 21.87 …8.14 | 26.64 …8.23 | 29.40 …12.67 | 27.14 …8.83 | |
| 24 F | 21.93 …9.27 | 27.89 …9.32 | 31.16 …13.33 | 27.81 …9.55 | |
| 26 F | 23.71 …10.02 | 27.99 …9.65 | 33.69 …14.55 | 29.32 …10.65 | |
| 28 F | 23.83 …10.68 | 30.48 …10.84 | 35.35 …15.11 | 30.80 …10.90 | |
| 30 F | 23.96 …11.81 | 30.49 …10.66 | 36.80 …16.35 | 31.81 …12.36 |
| Bar Shape | Round | Drop | Rectangular | Quadragular | |
|---|---|---|---|---|---|
| 0.2 …0.475 | 0.2 …0.475 | 0.2 …0.6 | 0.2 …0.45 | ||
| 18 F | 24.72 …11.49 | 23.23 …10.79 | 28.19 …12.09 | 23.19 …10.17 | |
| 20 F | 26.19 …13.63 | 23.09 …12.02 | 29.73 …12.60 | 24.32 …10.78 | |
| 22 F | 26.87 …14.00 | 24.19 …12.61 | 32.12 …13.54 | 26.57 …11.28 | |
| 24 F | 27.95 …15.54 | 25.63 …14.25 | 33.59 …13.99 | 27.85 …11.92 | |
| 26 F | 28.70 …15.61 | 27.75 …15.10 | 35.14 …14.96 | 29.29 …12.48 | |
| 28 F | 29.77 …17.74 | 27.77 …16.55 | 35.91 …15.52 | 30.29 …13.35 | |
| 30 F | 30.64 …18.28 | 29.27 …17.46 | 36.19 …16.73 | 31.79 …13.78 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chasiotis, I.D.; Karnavas, Y.L.; Scuiller, F. Effect of Rotor Bars Shape on the Single-Phase Induction Motors Performance: An Analysis toward Their Efficiency Improvement. Energies 2022, 15, 717. https://0-doi-org.brum.beds.ac.uk/10.3390/en15030717
Chasiotis ID, Karnavas YL, Scuiller F. Effect of Rotor Bars Shape on the Single-Phase Induction Motors Performance: An Analysis toward Their Efficiency Improvement. Energies. 2022; 15(3):717. https://0-doi-org.brum.beds.ac.uk/10.3390/en15030717
Chicago/Turabian StyleChasiotis, Ioannis D., Yannis L. Karnavas, and Franck Scuiller. 2022. "Effect of Rotor Bars Shape on the Single-Phase Induction Motors Performance: An Analysis toward Their Efficiency Improvement" Energies 15, no. 3: 717. https://0-doi-org.brum.beds.ac.uk/10.3390/en15030717