
A Heuristic Charging Cost Optimization Algorithm for Residential Charging of Electric Vehicles

 ,
,  ,
,  ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
- We developed a charging cost optimization algorithm that learns the characteristics of EVs and real-time price patterns and computes a threshold value of price for each arrival and departure sequence of EVs. The threshold value is utilized to schedule the charging operation of EVs with minimizing the charging cost and respecting the operational constraints of the power grid.
- We show how the different schemes influence the charging cost and grid overloading by developing charging scenarios for individual and aggregated EVs with fixed and random arrival and departure sequences against the real-time electricity price patterns.
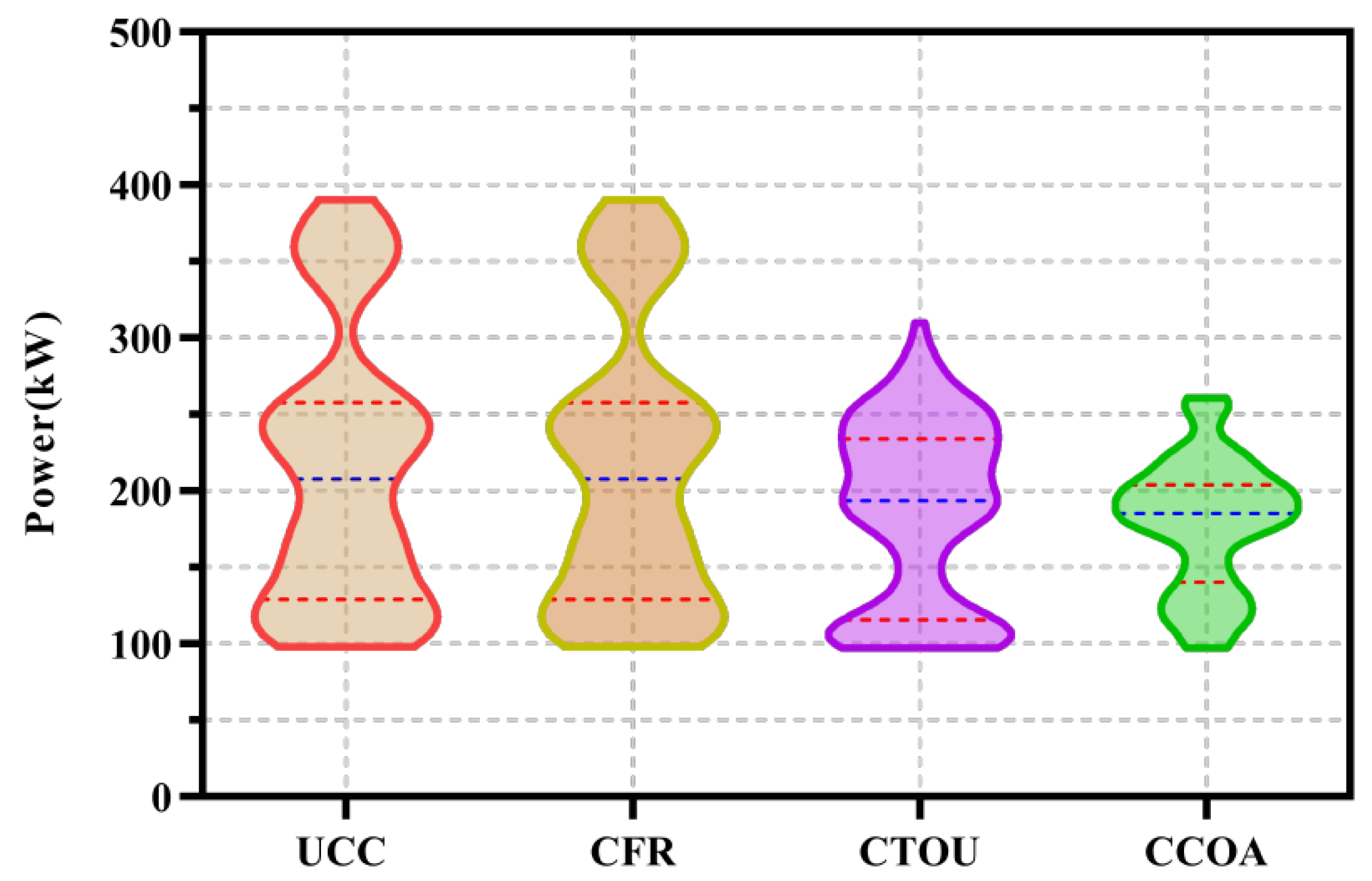
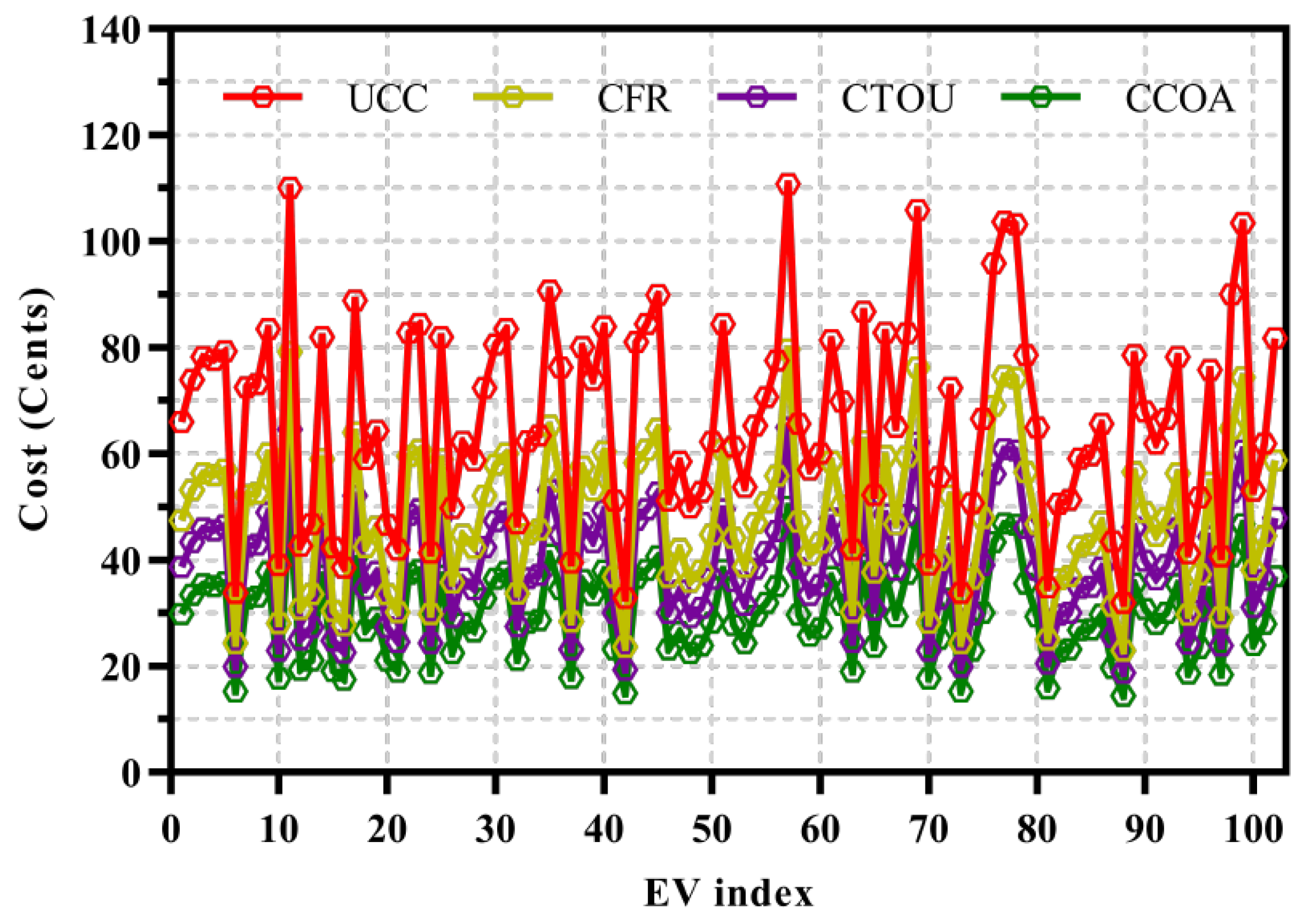
- We evaluated the performance of the proposed CCOA against the uncoordinated, flat-rate, and time-of-use systems in terms of charging cost and grid overloading.
2. Literature Survey
3. Proposed Charging Cost Optimization Algorithm
3.1. Uncoordinated Charging
3.2. Coordinated Charging
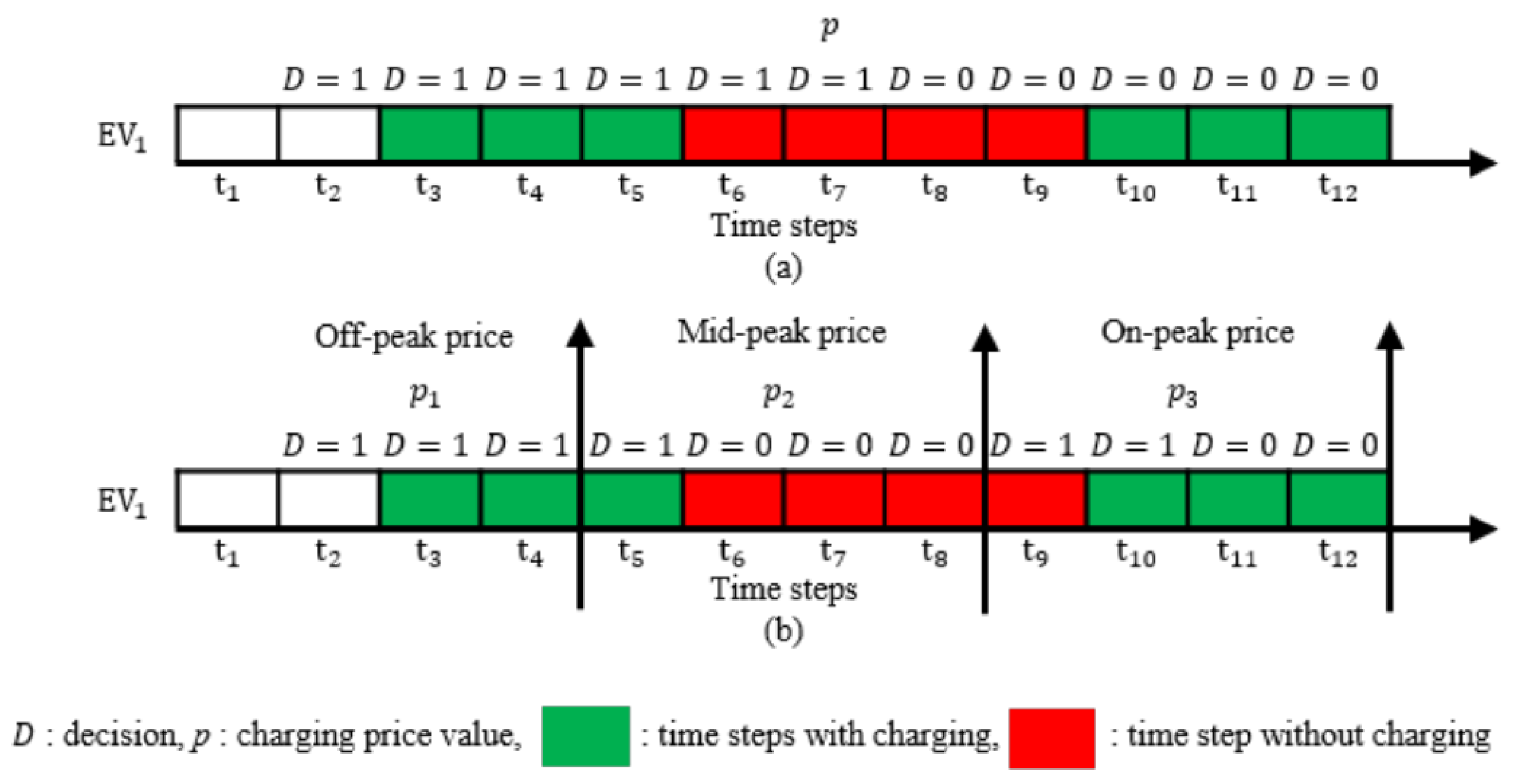
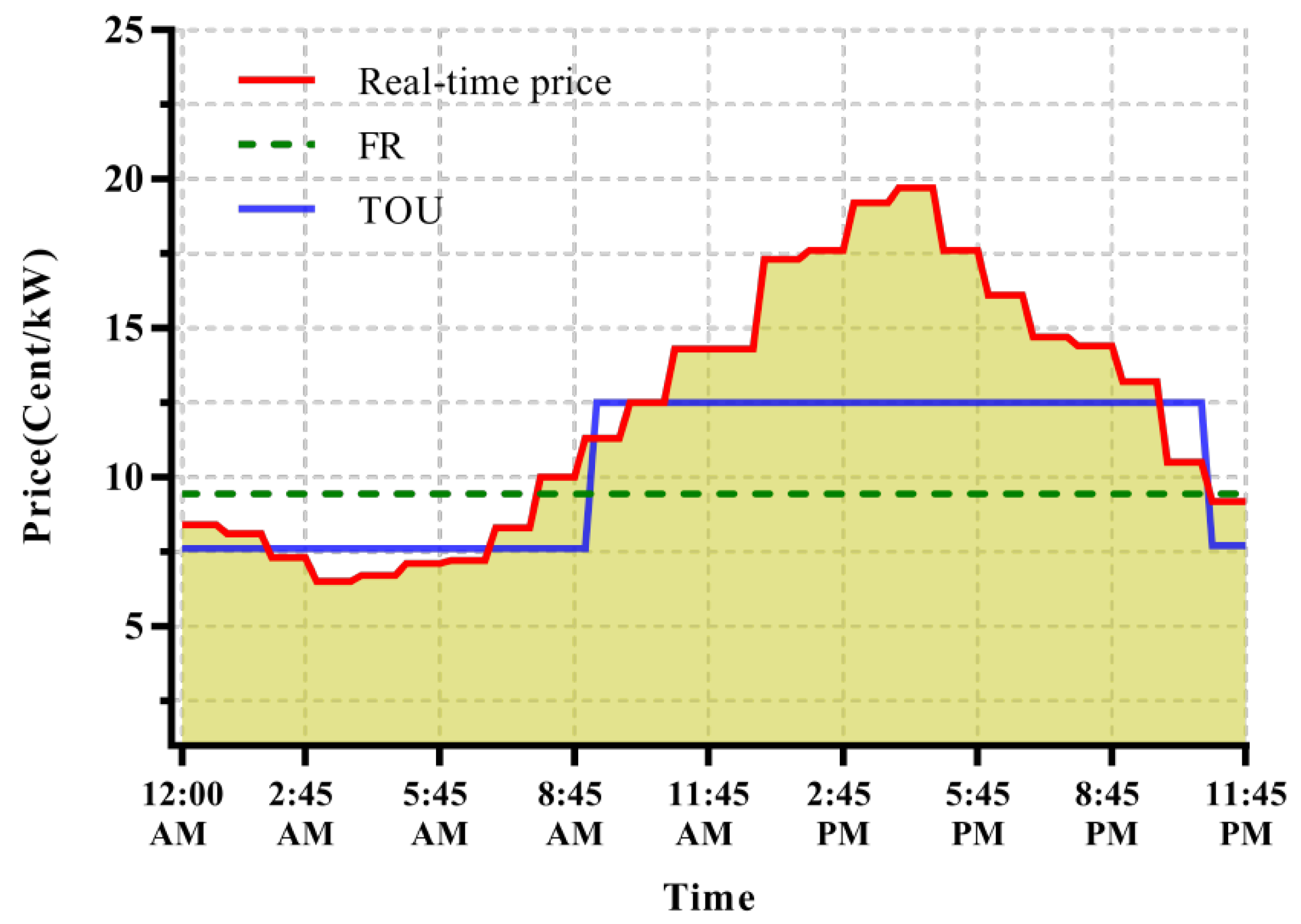
3.2.1. Time-of-Use Tariff Systems
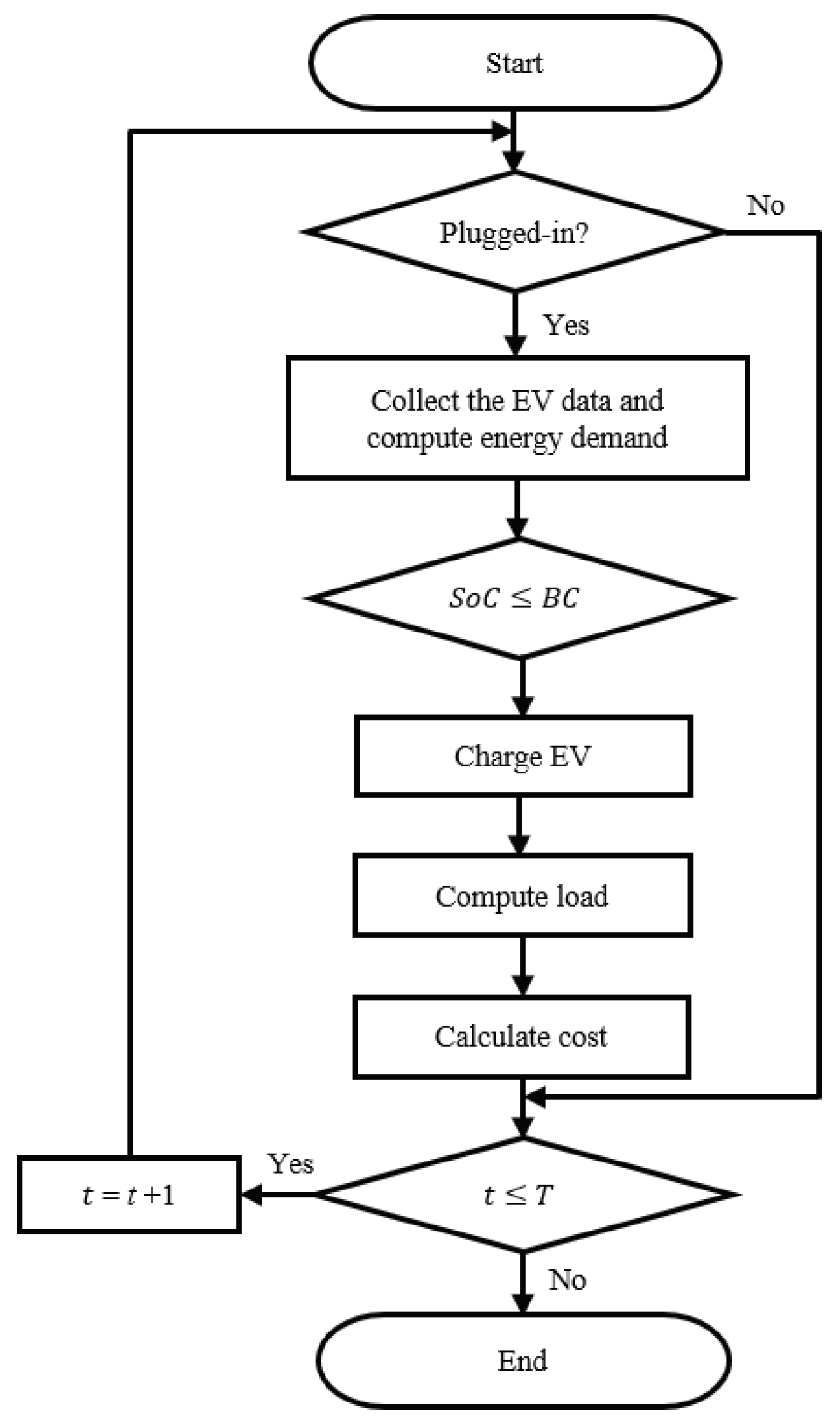
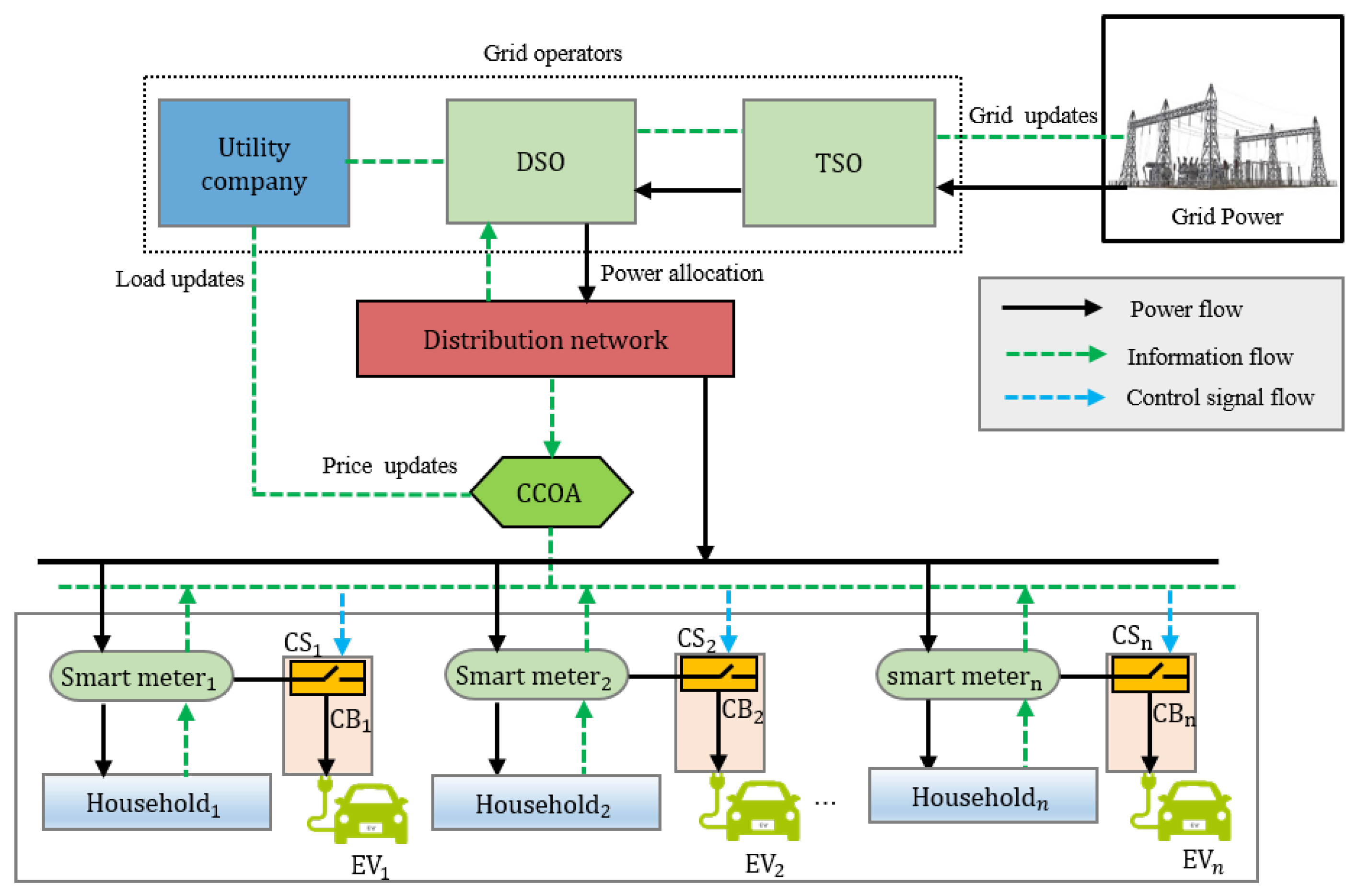
3.2.2. The Proposed Charging Cost Optimization Algorithm
| Algorithm 1 Main Algorithm of the proposed charging cost optimization algorithm (CCOA) | |
| Input: Arrival and departure times, battery capacity, state-of-charge, and price profile | |
| Output: Optimal charging cost and electric load profiles | |
| 1: Initialize the system local and global variables | |
| 2: Load the electric load (L) and price (P) vectors | |
| 3: for to do | |
| 4: for to do | |
| 5: Compute and | ▹ According to Equations (2) and (3) |
| 6: Compute and | ▹ According to Equations (4) and (5) |
| 7: Validate constraint defined in Equation (9) | |
| 8: for to do | |
| 9: if (≤) then | ▹ Validate constraint defined in Equation (8) |
| 10: | ▹ Feasible time steps for charging |
| 11: end if | |
| 12: | |
| 13: end for | |
| 14: end for | |
| 15: | |
| 16: for to do | |
| 17: for to do | |
| 18: while () do | |
| 19: if () then | |
| 20: | ▹ Optimal time steps with lowest cost |
| 21: | |
| 22: | |
| 23: end if | |
| 24: | |
| 25: end while | |
| 26: end for | |
| 27: Charge_Control() | |
| 28: Print the updated results | |
| 29: end for | |
| 30: | |
| 31: end for | |
- Step 1.
- Initialize all the system local and global variables (i.e., N, t, , and the arrays) and load L and price P vectors.
- Step 2.
- Step 3.
- Collect the FTS for charging each of the i-th EVs according the threshold price value defined within their arrival and departure sequence in lines 7 to 12.
- Step 4.
- Get the first price value from the feasible time steps FTS a.k.a. the feasible solution set and compute the OTS by setting the decision D variable for each of the i-th EV in lines 15 to 25.
- Step 5.
- Call the subroutine Charge_Control (i.e., Algorithm 2). First, it validates constraints defined by Equations (10) and (11). Then, it checks the optimal charging steps, the decision variable, and the energy requirements and thereby controls the charging process of EVs according to their optimal schedules. For each charging, the activity updates the charging cost and the electric load vectors in lines 6 to 12. Finally, it returns the updated SoC, charging cost C, and electric load L vectors to Algorithm 1.
- Step 6.
- Print the updated results. Increment the time step t and repeat the process for the remaining intervals.
| Algorithm 2 Charge_Control() | |
| 1: Initialize local variables | |
| 2: for to do | |
| 3: while () do | |
| 4: Validate constraint defined in Equations (10) and (11) | |
| 5: if () then | |
| 6: | ▹ Charge i-th EV |
| 7: | ▹ Update charging cost |
| 8: | ▹ Update electric load |
| 9: else | |
| 10: | |
| 11: | |
| 12: | |
| 13: end if | |
| 14: | |
| 15: end while | |
| 16: end for | |
| 17: Return updated (, , and ) | |
4. Simulation Results and Discussion
4.1. Individual Charging Scenario
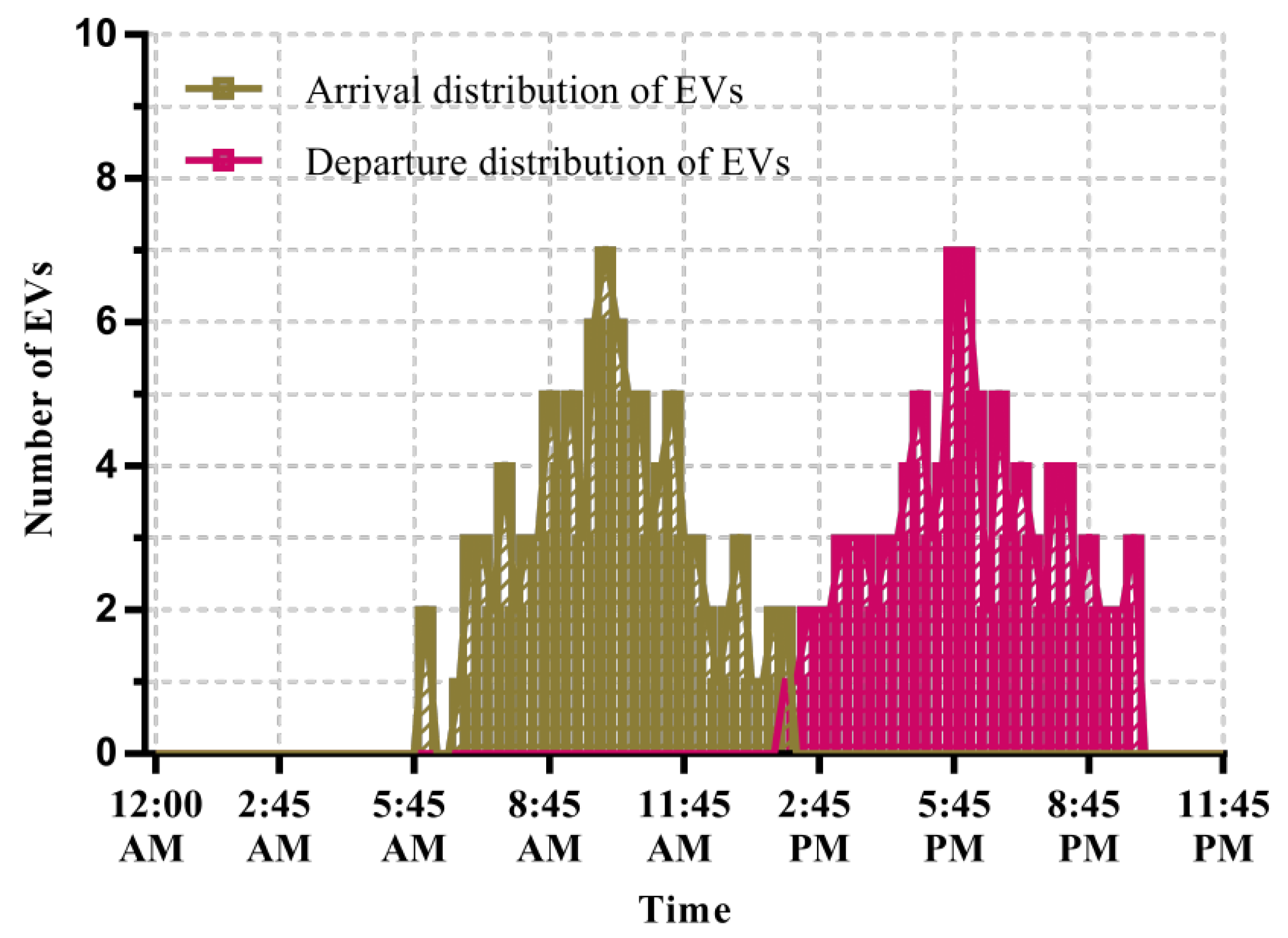
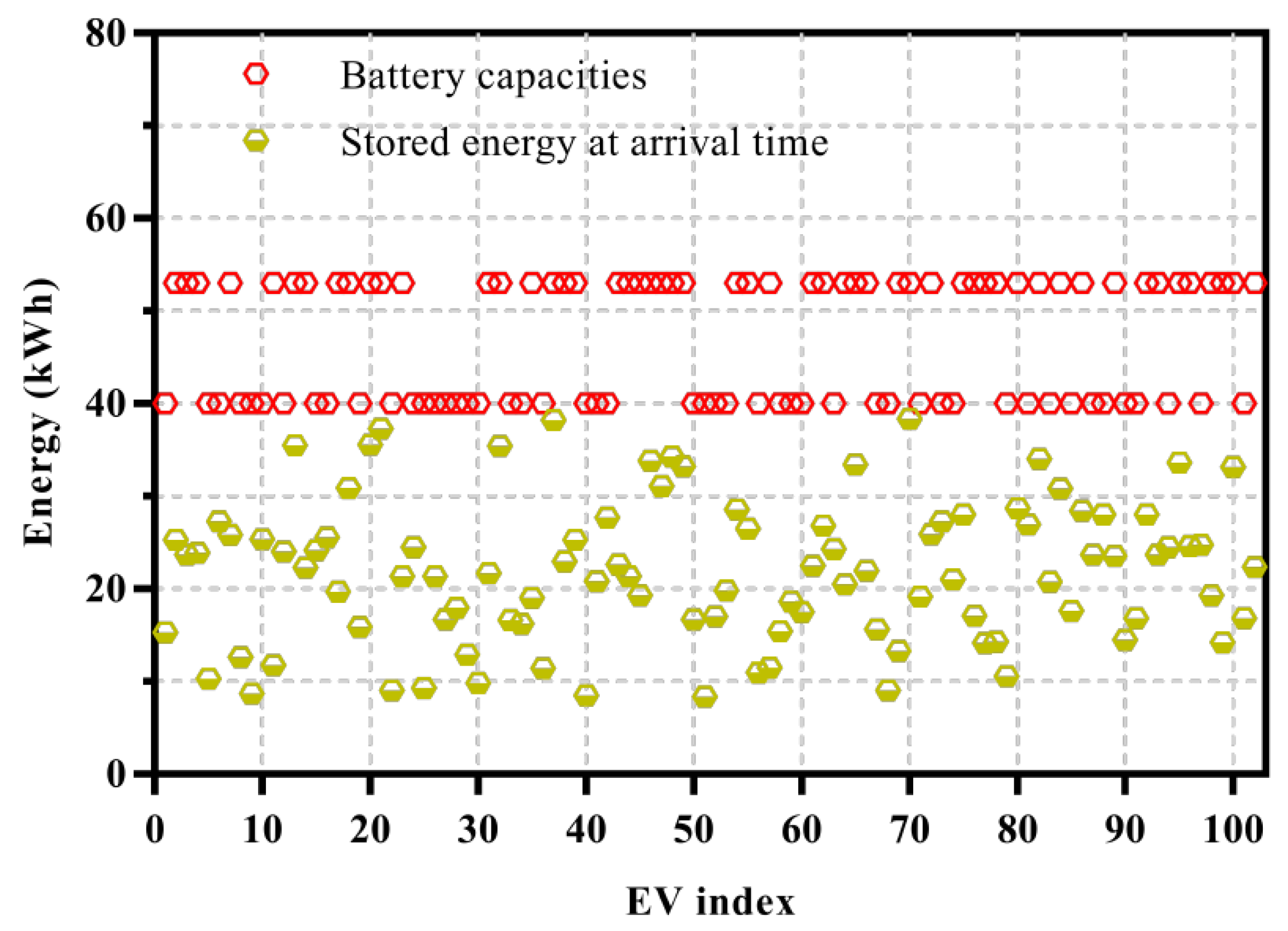
4.2. Aggregated Charging Scenario
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| EVs | electric vehicles |
| CCOA | charging cost optimization algorithms |
| CO2 | carbon dioxide |
| ICEs | internal combustion engines |
| MMT | million metric ton |
| V2G | vehicle-to-grid |
| TOU | time of use |
| SoC | state-of-charge |
| SoCmin | minimum state-of-charge |
| SoCmax | maximum state-of-charge |
| GA | genetic algorithm |
| NHTS | National Household Travel Survey |
| PEVs | plug-in electric vehicles |
| MILP | mixed integer linear programming |
| CSs | charging stations |
| t | time step |
| BC | battery capacity |
| C | charging cost |
| i | index of an EV |
| E | energy |
| P | charging price |
| ta | arrival time |
| td | departure time |
| St | stay time |
| D | decision control variable |
| kWh | kilowatt-hour |
| P1 | off-peak/valley price |
| P2 | mid-peak price price |
| P3 | on-peak price price |
| TSO | transmission system operator |
| DSO | distribution system operator |
| LV | low-voltage |
| Er | required amount of energy |
| BC | battery capacity |
| Cr | charging rate |
| minimum charging rate | |
| maximum charging rate | |
| RT | required time to charge |
| Ph | threshold price value |
| L | electric load |
| N | number of EVs array/vector |
| T | maximum number of simulation steps |
| i, j, k | loop control variables |
| FTS | feasible time steps array/vector |
| OTS | optimal time steps array/vector |
| UCC | uncoordinated charging |
| CFR | coordinated charging based on flat-rate |
| CTOU | coordinated charging based on time-of-use |
| V | voltage |
| I | current |
| μ | mean |
| σ | standard deviation |
| η | charging efficiency |
| probability distribution function |
References
- Beliveau, M.; Rehberger, J.; Rowell, J.; Xarras, A. A Study on Hybrid Cars: Environmental Effects and Consumer Habits. Bachelor’s Thesis, Worcester Polytechnic Institute, Worcester, MA, USA, 2010. [Google Scholar]
- Lee, W.; Schubert, E.; Li, Y.; Li, S.; Bobba, D.; Sarlioglu, B. Electrification of turbocharger and supercharger for downsized internal combustion engines and hybrid electric vehicles-benefits and challenges. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, Michigan, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Domke, G.M.; Walters, B.F.; Nowak, D.J.; Smith, J.; Nichols, M.C.; Ogle, S.M.; Coulston, J.; Wirth, T. Greenhouse gas emissions and removals from forest land, woodlands, and urban trees in the United States, 1990–2019. In Resource Update FS–307; US Department of Agriculture, Forest Service, Northern Research Station. 5: Madison, WI, USA, 2021; Volume 307. [Google Scholar]
- Arora, S.; Priolkar, J. Simulation and analysis of hybrid energy source for electric vehicle. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Lee, E.H.P.; Lukszo, Z. Scheduling fuel cell electric vehicles as power plants in a community microgrid. In Proceedings of the 2016 IEEE Pes Innovative Smart Grid Technologies Conference Europe (Isgt-Europe), Ljubljana, Slovenia, 9–12 October 2016; pp. 1–6. [Google Scholar]
- Shao, S.; Pipattanasomporn, M.; Rahman, S. Grid integration of electric vehicles and demand response with customer choice. IEEE Trans. Smart Grid 2012, 3, 543–550. [Google Scholar] [CrossRef]
- Khan, R.H.; Stüdli, S.; Khan, J.Y. A network controlled load management scheme for domestic charging of electric vehicles. In Proceedings of the 2013 Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 September–3 October 2013. [Google Scholar]
- Rahim, M.H.; Javaid, N.; Shafiq, S.; Iqbal, M.N.; Khalid, M.U.; Memon, U.U. Exploiting heuristic techniques for efficient energy management system in smart grid. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 54–59. [Google Scholar]
- Detzler, S.; Eichhorn, C.; Karnouskos, S. Charging optimization of enterprise electric vehicles for participation in demand response. In Proceedings of the 2015 International Symposium on Smart Electric Distribution Systems and Technologies (EDST), Vienna, Austria, 7–11 September 2015; pp. 284–289. [Google Scholar]
- Shahzad, A.; Xiong, N.; Irfan, M.; Lee, M.; Hussain, S.; Khaltar, B. A SCADA intermediate simulation platform to enhance the system security. In Proceedings of the 2015 17th International Conference on Advanced Communication Technology (ICACT), Phoenix Park, Korea, 1–3 July 2015; pp. 368–373. [Google Scholar]
- Hussain, S.; Kim, Y.C. Simulation studies of resilient communication network architecture for monitoring and control wind power farms. In Proceedings of the 2015 17th International Conference on Advanced Communication Technology (ICACT), Phoenix Park, Korea, 1–3 July 2015; pp. 653–658. [Google Scholar]
- Hussain, S.; Kim, Y.C. Multilayer communication network architecture for wind power farm. In Proceedings of the 2014 IEEE 19th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Athens, Greece, 1–3 December 2014; pp. 105–109. [Google Scholar]
- Carli, R.; Dotoli, M. A distributed control algorithm for waterfilling of networked control systems via consensus. IEEE Control Syst. Lett. 2017, 1, 334–339. [Google Scholar] [CrossRef]
- Hussain, S.; Kim, Y.C.; Jan, Q.; Ali, Z. Simulation Studies of Reconfigurable Communication Network for Southwest Offshore Wind Farm South Korea. In Proceedings of the 2019 2nd International Conference on Communication, Computing and Digital systems (C-CODE), Islamabad, Pakistan, 6–7 March 2019; pp. 58–63. [Google Scholar]
- Panday, A.; Bansal, H.O. A review of optimal energy management strategies for hybrid electric vehicle. Int. J. Veh. Technol. 2014. [Google Scholar] [CrossRef] [Green Version]
- Braun, A.; Rid, W. The influence of driving patterns on energy consumption in electric car driving and the role of regenerative braking. Transp. Res. Procedia 2017, 22, 174–182. [Google Scholar] [CrossRef]
- Paterakis, N.G.; Gibescu, M. A methodology to generate power profiles of electric vehicle parking lots under different operational strategies. Appl. Energy 2016, 173, 111–123. [Google Scholar] [CrossRef] [Green Version]
- Mets, K.; Verschueren, T.; De Turck, F.; Develder, C. Exploiting V2G to optimize residential energy consumption with electrical vehicle (dis) charging. In Proceedings of the 2011 IEEE First International Workshop on Smart Grid Modeling and Simulation (SGMS), Brussels, Belgium, 17 October 2011; pp. 7–12. [Google Scholar]
- Alonso, M.; Amaris, H.; Germain, J.G.; Galan, J.M. Optimal charging scheduling of electric vehicles in smart grids by heuristic algorithms. Energies 2014, 7, 2449–2475. [Google Scholar] [CrossRef]
- Sandels, C.; Franke, U.; Ingvar, N.; Nordström, L.; Hamren, R. Vehicle to grid—Monte Carlo simulations for optimal aggregator strategies. In Proceedings of the 2010 International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010; pp. 1–8. [Google Scholar]
- Lojowska, A.; Kurowicka, D.; Papaefthymiou, G.; van der Sluis, L. From transportation patterns to power demand: Stochastic modeling of uncontrolled domestic charging of electric vehicles. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA; 2011; pp. 1–7. [Google Scholar]
- Wang, D.; Guan, X.; Wu, J.; Gao, J. Analysis of multi-location PEV charging behaviors based on trip chain generation. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), Taipei, Taiwan, 18–22 August 2014; pp. 151–156. [Google Scholar]
- Yusuf, J.; Watanabe, R.; Ula, S.; Todd, M.; Gomez, H. Data Driven Stochastic Energy Cost Optimization with V2G Operation in Commercial Buildings. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 April 2021; pp. 1–6. [Google Scholar]
- Faia, R.; Soares, J.; Vale, Z.; Corchado, J.M. An optimization model for energy community costs minimization considering a local electricity market between prosumers and electric vehicles. Electronics 2021, 10, 129. [Google Scholar] [CrossRef]
- Hussain, S.; Ahmed, M.A.; Kim, Y.C. Efficient power management algorithm based on fuzzy logic inference for electric vehicles parking lot. IEEE Access 2019, 7, 65467–65485. [Google Scholar] [CrossRef]
- Hussain, S.; Lee, K.B.; A Ahmed, M.; Hayes, B.; Kim, Y.C. Two-stage fuzzy logic inference algorithm for maximizing the quality of performance under the operational constraints of power grid in electric vehicle parking lots. Energies 2020, 13, 4634. [Google Scholar] [CrossRef]
- Hussain, S.; Kim, Y.S.; Thakur, S.; Breslin, J.G. Optimization of Waiting Time for Electric Vehicles Using a Fuzzy Inference System. IEEE Trans. Intell. Transp. Syst. 2022. [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2010, 26, 802–810. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control. Syst. Technol. 2011, 21, 67–78. [Google Scholar] [CrossRef]
- Zhang, P.; Qian, K.; Zhou, C.; Stewart, B.; Hepburn, D. Demand response for optimisation of power systems demand due to EV charging load. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012; pp. 1–4. [Google Scholar]
- Ansarin, M.; Ghiassi-Farrokhfal, Y.; Ketter, W.; Collins, J. The economic consequences of electricity tariff design in a renewable energy era. Appl. Energy 2020, 275, 115317. [Google Scholar] [CrossRef]
- Hussain, S.; Ahmed, M.A.; Lee, K.B.; Kim, Y.C. Fuzzy logic weight based charging scheme for optimal distribution of charging power among electric vehicles in a parking lot. Energies 2020, 13, 3119. [Google Scholar] [CrossRef]
- Chen, L.; Huang, X.; Zhang, H.; Luo, Y. A study on coordinated optimization of electric vehicle charging and charging pile selection. Energies 2018, 11, 1350. [Google Scholar] [CrossRef] [Green Version]
- Soltani, N.Y.; Kim, S.J.; Giannakis, G.B. Real-time load elasticity tracking and pricing for electric vehicle charging. IEEE Trans. Smart Grid 2014, 6, 1303–1313. [Google Scholar] [CrossRef]
- Ghenai, C.; Bettayeb, M. Data analysis of the electricity generation mix for clean energy transition during COVID-19 lockdowns. In Energy Sources, Part A: Recovery, Utilization, and Environmental Effects; Taylor & Francis: Boca Raton, FL, USA, 2021; pp. 1–21. [Google Scholar]
- Venegas, F.G.; Petit, M.; Perez, Y. Active integration of electric vehicles into distribution grids: Barriers and frameworks for flexibility services. Renew. Sustain. Energy Rev. 2021, 145, 111060. [Google Scholar] [CrossRef]
- Lonergan, K.E.; Sansavini, G. Business structure of electricity distribution system operator and effect on solar photovoltaic uptake: An empirical case study for Switzerland. Energy Policy 2022, 160, 112683. [Google Scholar] [CrossRef]
- Kuiken, D. Regulating electricity network reliability. In Elgar Encyclopedia of Environmental Law; Edward Elgar Publishing Limited: Cheltenham, UK, 2021; pp. 611–620. [Google Scholar]
- Carli, R.; Dotoli, M. A distributed control algorithm for optimal charging of electric vehicle fleets with congestion management. IFAC-PapersOnLine 2018, 51, 373–378. [Google Scholar] [CrossRef]
- Stüdli, S.; Crisostomi, E.; Middleton, R.; Shorten, R. A flexible distributed framework for realising electric and plug-in hybrid vehicle charging policies. Int. J. Control 2012, 85, 1130–1145. [Google Scholar] [CrossRef]
- Algarni, A.; Siegel, H.J.; Maciejewski, A.A.; Suryanarayanan, S. Incorporation of Survey-based Data into an Aggregation Algorithm for Residential Demand Response. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June–2 July 2021; pp. 1–5. [Google Scholar]
- Dickerman, L.; Harrison, J. A new car, a new grid. IEEE Power Energy Mag. 2010, 8, 55–61. [Google Scholar] [CrossRef]
- Marková, I.; Oravec, M.; Osvaldová, L.M.; Sventeková, E.; Jurč, D. Magnetic Fields of Devices during Electric Vehicle Charging: A Slovak Case Study. Symmetry 2021, 13, 1979. [Google Scholar] [CrossRef]
- Sarabi, S.; Kefsi, L.; Asma, M.; Robyns, B. Supervision of Plug-In Electric Vehicles Connected to the Electric Distribution Grids. Int. J. Electr. Energy 2013, 1, 256–263. [Google Scholar] [CrossRef] [Green Version]
- Tamura, S.; Kikuchi, T. V2G strategy for frequency regulation based on economic evaluation considering EV battery longevity. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), Turino, Italy, 7–11 October 2018; pp. 1–6. [Google Scholar]
- Preethi, A.A.; Nesamalar, J.J.D.; Suganya, S.; Raja, S.C. Economic scheduling of Plug-In Hybrid Electric Vehicle considering various travel patterns. In Proceedings of the 2018 National Power Engineering Conference (NPEC), Madurai, India, 9–10 March 2018; pp. 1–7. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Description | Reference |
|---|---|---|---|
| V | 220 V | Voltage | [42] |
| I | 30 Amp | Current | |
| Cr | 6.6 kWh | Fast charger | |
| BC | 53 kWh | Tesla | |
| ta | 5:45 PM | Arrital time | [44] |
| td | 9:15 AM | Departure time | |
| SoC | 0.4 | Stored energy | - |
| SoCmin | 0.2 | Minimum energy | |
| SoCmax | 1 | Until BC | |
| RT | 19.5 | Required time steps | Equation (4) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, S.; Thakur, S.; Shukla, S.; Breslin, J.G.; Jan, Q.; Khan, F.; Ahmad, I.; Marzband, M.; Madden, M.G. A Heuristic Charging Cost Optimization Algorithm for Residential Charging of Electric Vehicles. Energies 2022, 15, 1304. https://0-doi-org.brum.beds.ac.uk/10.3390/en15041304
Hussain S, Thakur S, Shukla S, Breslin JG, Jan Q, Khan F, Ahmad I, Marzband M, Madden MG. A Heuristic Charging Cost Optimization Algorithm for Residential Charging of Electric Vehicles. Energies. 2022; 15(4):1304. https://0-doi-org.brum.beds.ac.uk/10.3390/en15041304
Chicago/Turabian StyleHussain, Shahid, Subhasis Thakur, Saurabh Shukla, John G. Breslin, Qasim Jan, Faisal Khan, Ibrar Ahmad, Mousa Marzband, and Michael G. Madden. 2022. "A Heuristic Charging Cost Optimization Algorithm for Residential Charging of Electric Vehicles" Energies 15, no. 4: 1304. https://0-doi-org.brum.beds.ac.uk/10.3390/en15041304