
An Effective DC-Link Voltage Control Strategy for Grid-Connected PMVG-Based Wind Energy Conversion System

 ,
,  , , and
, , and
Abstract
:
1. Introduction
- This study focuses on the development of novel control design aspects for the emerging WECS based on the PMVG as compared to the traditional PMSG-based WECS.
- An efficient DC-link voltage control is proposed based on non-linear SMC strategy in the GSC control of the PMVG-based WECS which presents improved transient performance.
- The presented PI-based sliding surface with a hybrid reaching law can achieve a reduced level of chattering and a faster convergence rate with a negligible value of steady-state tracking error.
- Finally, the effectiveness of the proposed control strategy is demonstrated in both simulation and experiment by comparisons with the conventional methods using a 5-kW PMVG model.
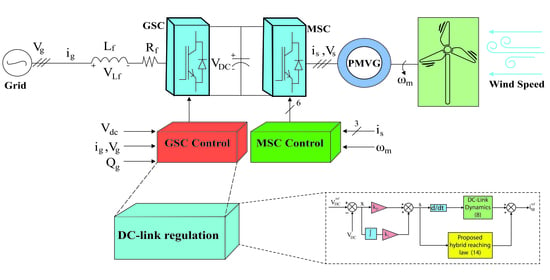
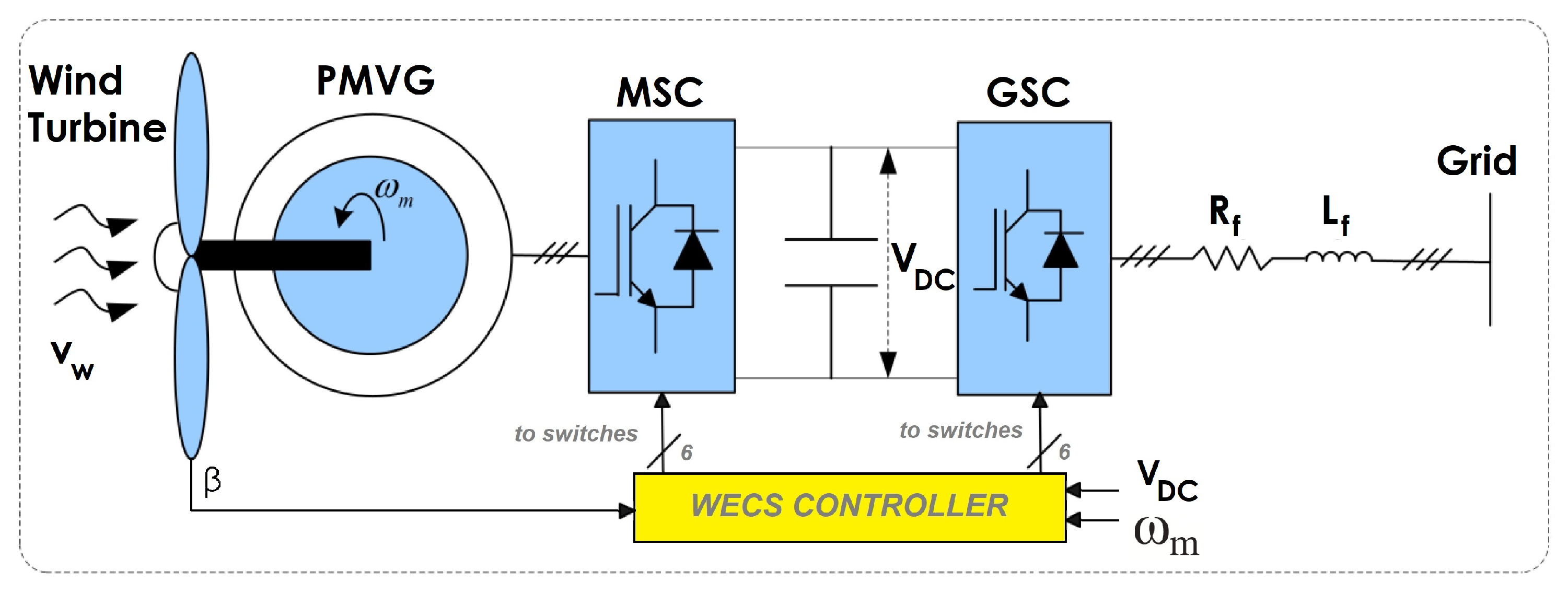
2. System Configuration of PMVG-Based WECS and Its Mathematical Modeling
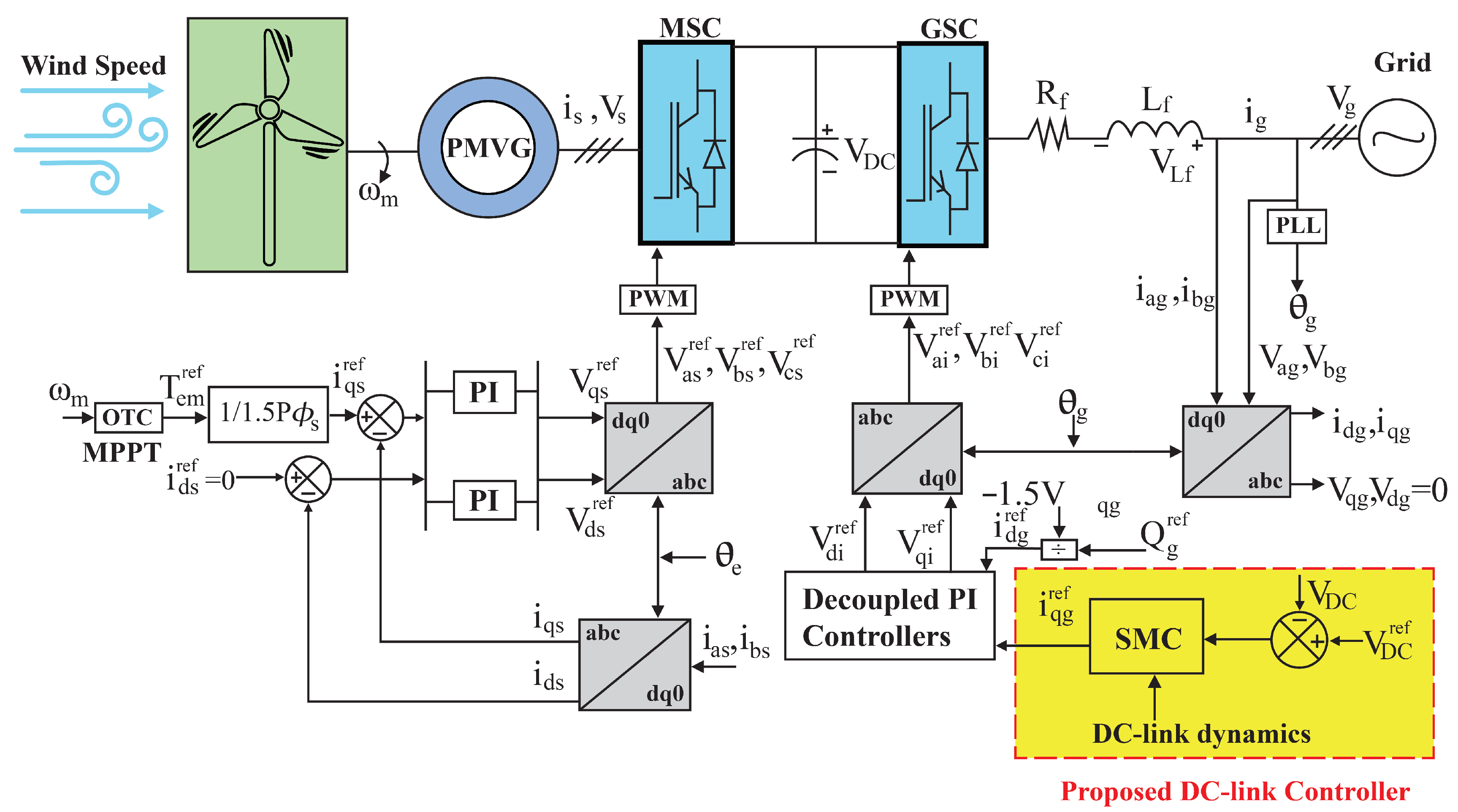
3. Design of DC-Link Voltage Control Based on SMC Strategy for PMVG-Based WECS
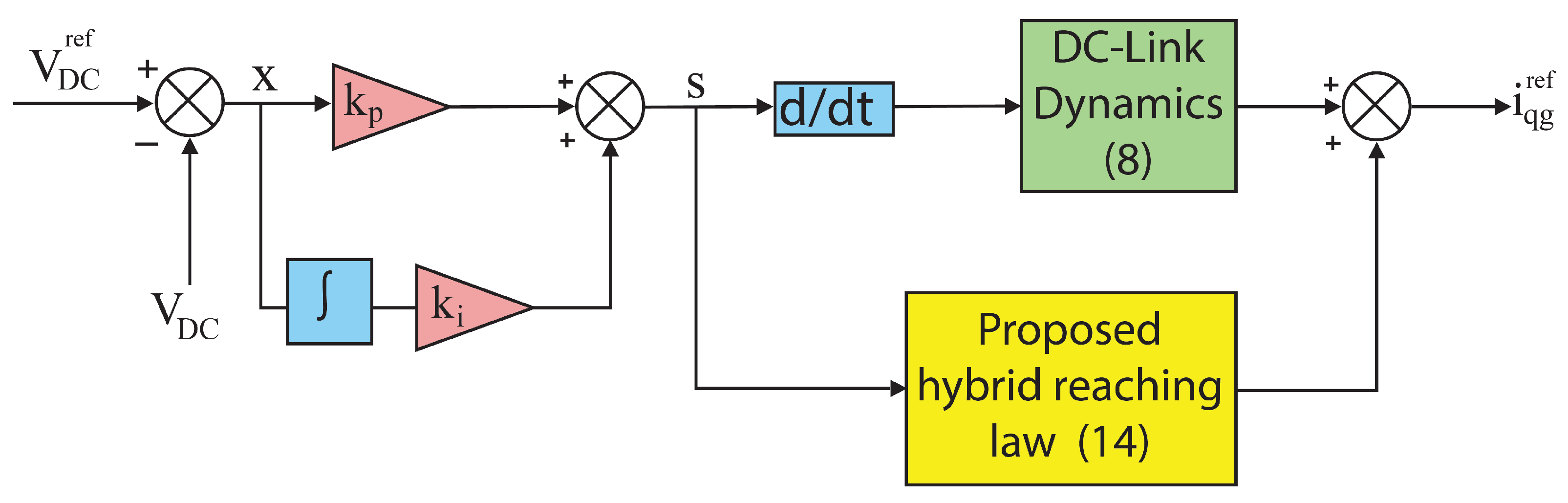
3.1. Sliding Surface Design
- 1.
- Choosing the PI-type sliding equation can help in achieving the properties of both conventional sliding equation and integral-type sliding equation.
- 2.
- By selecting the integral-type sliding equation alone, one can easily eliminate the steady-state error due to its integral action; nevertheless, in the presence of large uncertainties, its response is slow and oscillatory.
- 3.
- Hence, by including the proportional action in the sliding equation, the proposed PI-type sliding equation can ensure the better transient response under the larger uncertainties as well.
3.2. Design of Hybrid Reaching Law (HRL)
Reaching Time Calculation
3.3. Control Input Design Using the Proposed SMC-HRL
3.4. Stability Analysis
4. Simulation and Experimental Validation
4.1. Simulation Results
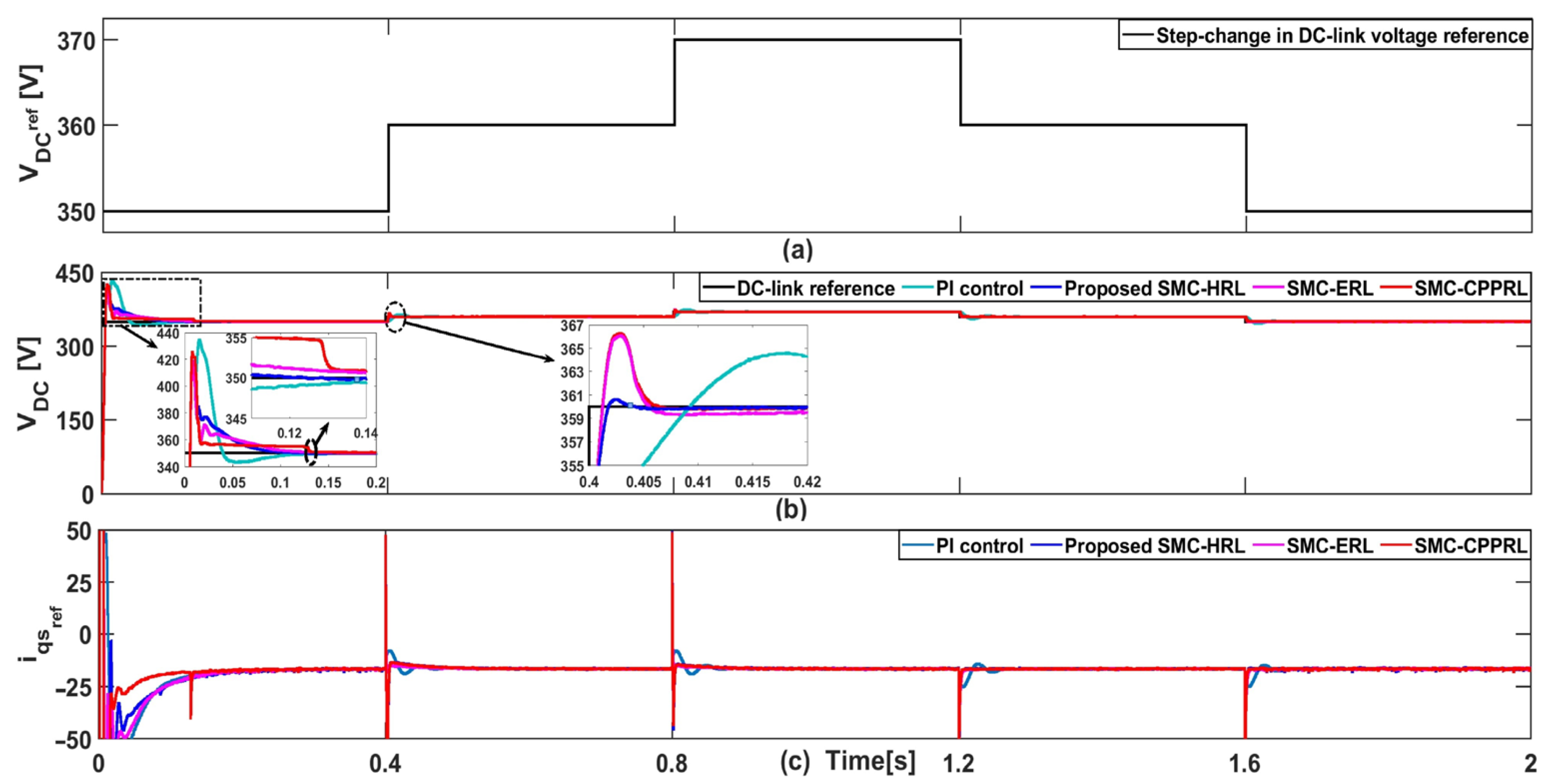
4.1.1. Controller Performance Analysis during the System Startup and DC-Link Reference Change
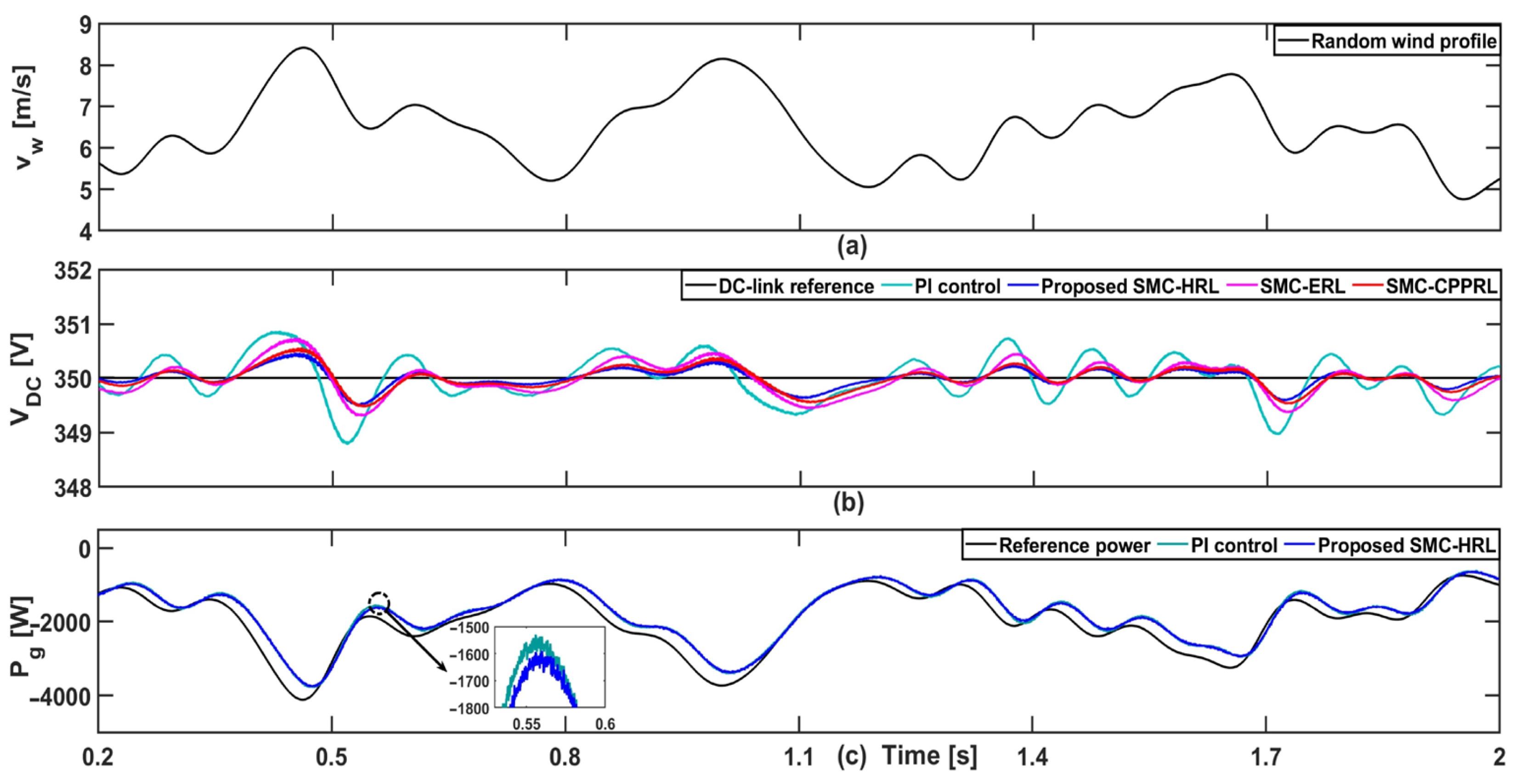
4.1.2. Controller Performance Analysis under the Wind Fluctuations and Grid-Side Fault Conditions
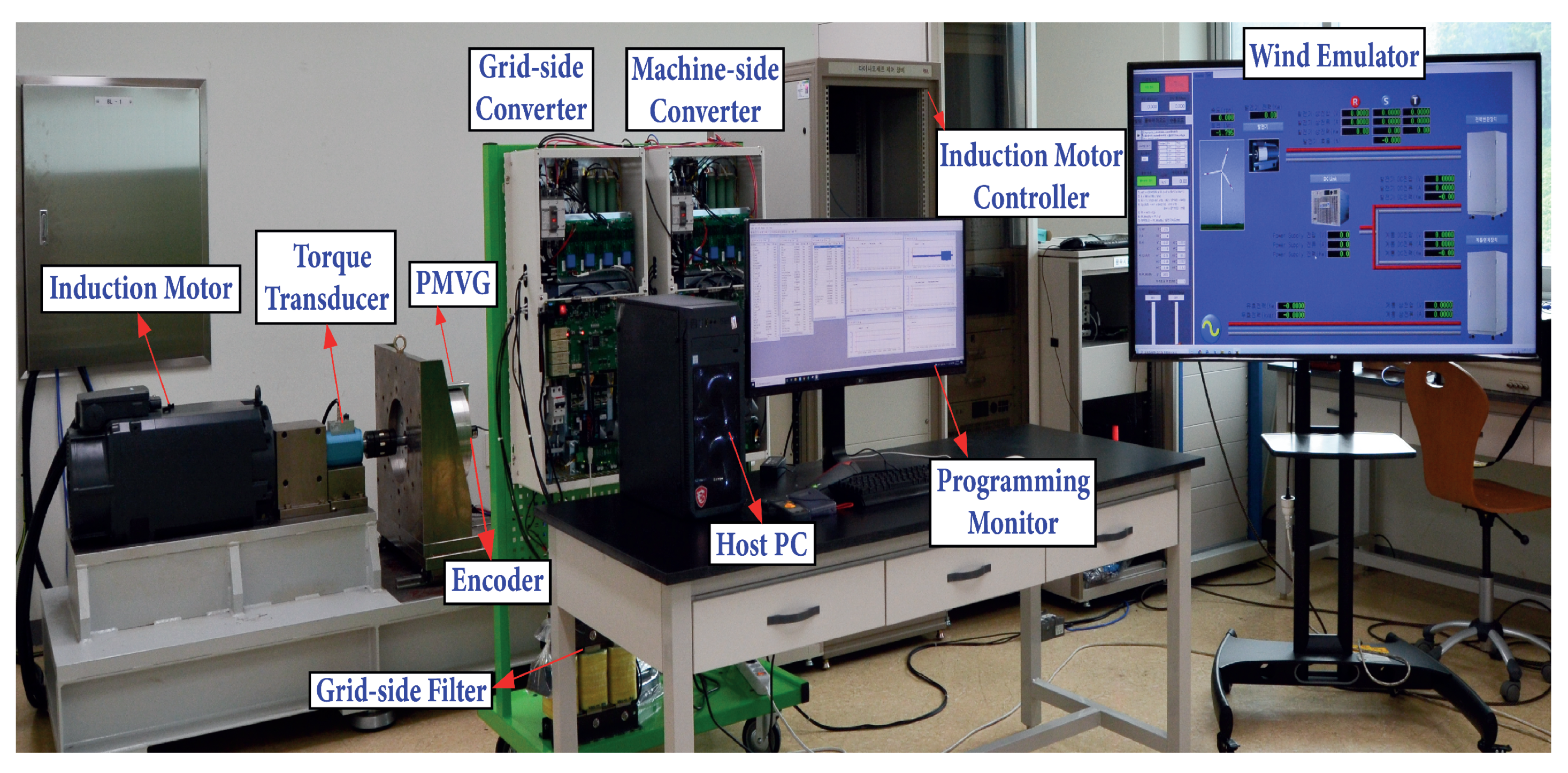
4.2. Experimental Validation and Results
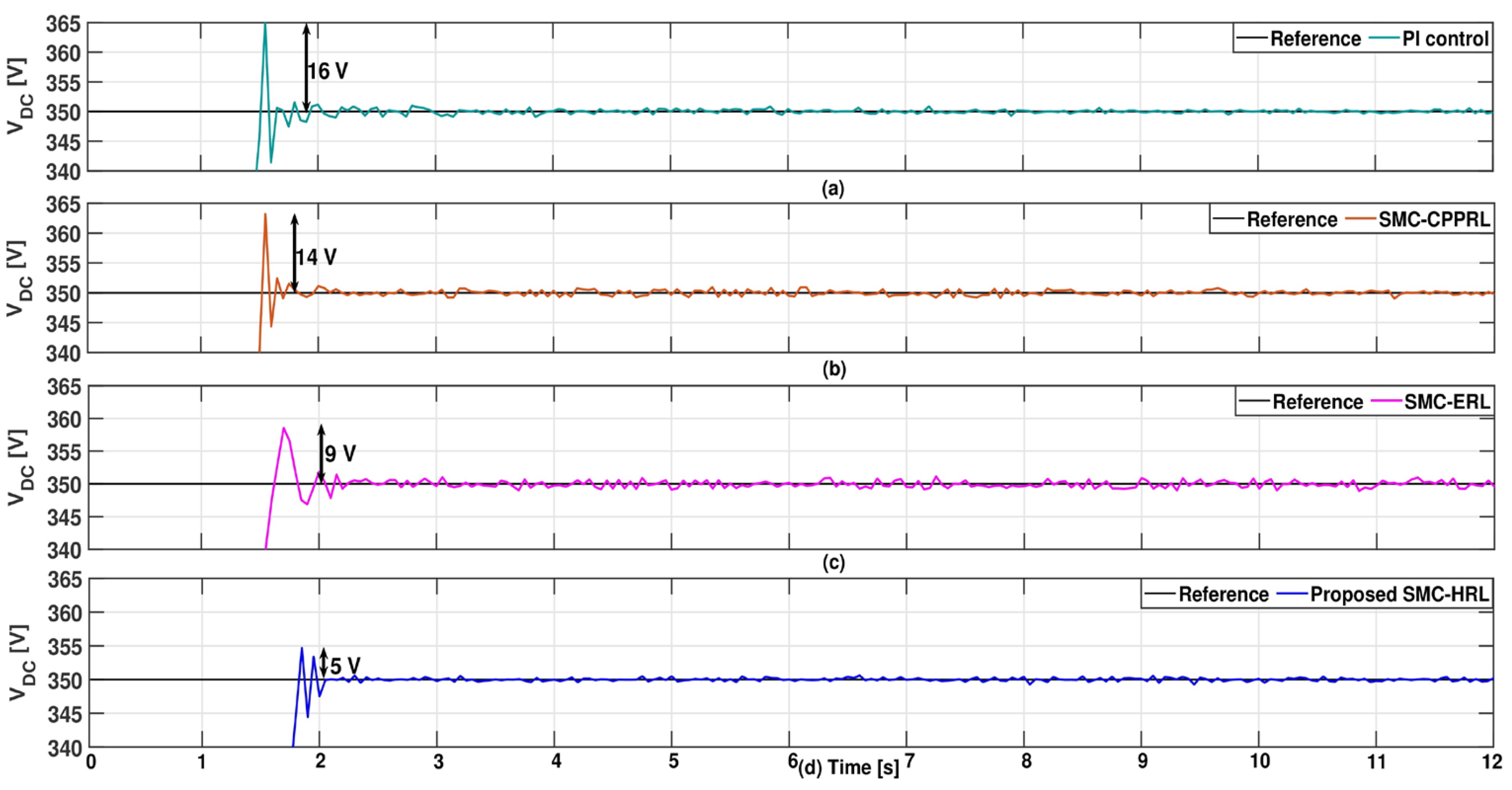
4.2.1. Experimental Verification of Controller Performance during the System Startup Condition
4.2.2. Experimental Verification of Controller’s Tracking Performance for the Step-Change in DC-Link Reference
4.2.3. Experimental Verification of Controller’s Dynamic Performance for the Wind Speed Variation Condition
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Semken, R.S.; Polikarpova, M.; Röyttä, P.; Alexandrova, J.; Pyrhönen, J.; Nerg, J.; Mikkola, A.; Backman, J. Direct-drive permanent magnet generators for high-power wind turbines: Benefits and limiting factors. IET Renew. Power Gener. 2012, 6, 1–8. [Google Scholar] [CrossRef]
- Kim, B.; Lipo, T.A. Operation and design principles of a PM vernier motor. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 5034–5041. [Google Scholar]
- Kim, B. Design method of a direct-drive permanent magnet vernier generator for a wind turbine system. IEEE Trans. Ind. Appl. 2019, 55, 4665–4675. [Google Scholar] [CrossRef]
- Labuschagne, C.; Kamper, M. Permanent magnet Vernier generator design for a small-scale passive wind generator system. In Proceedings of the 2021 IEEE International Electric Machines & Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021; pp. 1–7. [Google Scholar]
- Tlali, P.M.; Wang, R.J.; Gerber, S.; Botha, C.D.; Kamper, M.J. Design and performance comparison of vernier and conventional PM synchronous wind generators. IEEE Trans. Ind. Appl. 2020, 56, 2570–2579. [Google Scholar] [CrossRef]
- Padinharu, D.K.K.; Li, G.J.; Zhu, Z.Q.; Clark, R.; Thomas, A.S.; Azar, Z. System-Level Investigation of Multi-MW Direct-Drive Wind Power PM Vernier Generators. IEEE Access 2020, 8, 191433–191446. [Google Scholar] [CrossRef]
- Padinharu, D.K.K.; Li, G.J.; Zhu, Z.Q.; Clark, R.; Thomas, A.; Azar, Z.; Duke, A. Permanent Magnet Vernier Machines for Direct-Drive Offshore Wind Power: Benefits and Challenges. IEEE Access 2022, 10, 20652–20668. [Google Scholar] [CrossRef]
- Mayilsamy, G.; Natesan, B.; Joo, Y.H.; Lee, S.R. Fast Terminal Synergetic Control of PMVG-Based Wind Energy Conversion System for Enhancing the Power Extraction Efficiency. Energies 2022, 15, 2774. [Google Scholar] [CrossRef]
- Senthilnathan, K.; Annapoorani, K.I. A review on back-to-back converters in permanent magnet synchronous generator based wind energy conversion system. Indonesian J. Electr. Eng. Comput. Sci. 2016, 2, 583–591. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Li, H.; Liao, Y.; Chen, Z. An improved control strategy of limiting the DC-link voltage fluctuation for a doubly fed induction wind generator. IEEE Trans. Power Electron. 2008, 23, 1205–1213. [Google Scholar]
- Yuan, X.; Wang, F.; Boroyevich, D.; Li, Y.; Burgos, R. DC-link voltage control of a full power converter for wind generator operating in weak-grid systems. IEEE Trans. Power Electron. 2009, 24, 2178–2192. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, Y. Modeling and Modern Control of Wind Power; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Yaramasu, V.; Wu, B. Model Predictive Control of Wind Energy Conversion Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Mohapatra, G.; Debnath, M.K. A Novel Fuzzy-Based Model Predictive Adaptive Controller for a PMSG Wind Turbine. In Innovation in Electrical Power Engineering, Communication, and Computing Technology; Mishra, M., Sharma, R., Kumar Rathore, A., Nayak, J., Naik, B., Eds.; Springer: Singapore, 2022; pp. 65–73. [Google Scholar]
- Louar, F.; Ouari, A.; Omeiri, A.; Senani, F.; Rahab, A. Direct power control (DPC) of PMSG based wind energy conversion system. In Proceedings of the 2015 4th International Conference on Electrical Engineering (ICEE), Boumerdes, Algeria, 13–15 December 2015; pp. 1–6. [Google Scholar]
- Ayalew, B.E.; Elmoursi, M.S.; El-Saadany, E.F. Enhanced DC Voltage Regulation and Transient Response for Multi-terminal VSC-HVDC System Using Direct Power Control. IEEE Trans. Power Syst. 2021. [Google Scholar] [CrossRef]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 76. [Google Scholar]
- Bajracharya, C.; Molinas, M.; Suul, J.A.; Undeland, T.M. Understanding of tuning techniques of converter controllers for VSC-HVDC. In Proceedings of the Nordic Workshop on Power and Industrial Electronics (NORPIE/2008), Espoo, Finland, 9–11 June 2008. [Google Scholar]
- Luo, A.; Xu, X.; Fang, L.; Fang, H.; Wu, J.; Wu, C. Feedback-feedforward PI-type iterative learning control strategy for hybrid active power filter with injection circuit. IEEE Trans. Ind. Electron. 2010, 57, 3767–3779. [Google Scholar] [CrossRef]
- Merai, M.; Naouar, M.W.; Slama-Belkhodja, I. An improved DC-link voltage control strategy for grid connected converters. IEEE Trans. Power Electron. 2017, 33, 3575–3582. [Google Scholar] [CrossRef]
- Song, G.; Cao, B.; Chang, L.; Shao, R.; Xu, S. A novel DC-link voltage control for small-scale grid-connected wind energy conversion system. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 2461–2466. [Google Scholar] [CrossRef]
- Yin, L.; Zhao, Z.; Lu, T.; Yang, S.; Zou, G. An improved DC-link voltage fast control scheme for a PWM rectifier-inverter system. IEEE Trans. Ind. Appl. 2013, 50, 462–473. [Google Scholar] [CrossRef]
- Gui, Y.; Li, M.; Lu, J.; Golestan, S.; Guerrero, J.M.; Vasquez, J.C. A voltage modulated DPC approach for three-phase PWM rectifier. IEEE Trans. Ind. Electron. 2018, 65, 7612–7619. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, A.T.; Lee, D.C. Advanced LVRT strategy for SCIG-based wind energy conversion systems using feedback linearization and sliding mode control. J. Power Electron. 2021, 21, 1180–1189. [Google Scholar] [CrossRef]
- Youness, E.L.; Abdelaziz, E.G.; Aziz, D.; Jamal, B.; Najib, E.O.; Othmane, Z.; Khalid, M.; Bossoufi, B. Implementation and validation of backstepping control for PMSG wind turbine using dSPACE controller board. Energy Rep. 2019, 5, 807–821. [Google Scholar] [CrossRef]
- Periyanayagam, A.R.; Joo, Y.H. Integral sliding mode control for increasing maximum power extraction efficiency of variable-speed wind energy system. Int. J. Electr. Power Energy Syst. 2022, 139, 107958. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Y.; Liu, F.; Luo, L.; Cao, Y.; Shahidehpour, M. Voltage stability analysis and sliding-mode control method for rectifier in DC systems with constant power loads. IEEE J. Emerg. Select. Top. Power Electron. 2017, 5, 1621–1630. [Google Scholar] [CrossRef]
- Gui, Y.; Blaabjerg, F.; Wang, X.; Bendtsen, J.D.; Yang, D.; Stoustrup, J. Improved DC-link voltage regulation strategy for grid-connected converters. IEEE Trans. Ind. Electron. 2020, 68, 4977–4987. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Z.; Huang, W.; Chen, S. DC-link voltage regulation for wind power system by complementary sliding mode control. IEEE Access 2019, 7, 22773–22780. [Google Scholar] [CrossRef]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R. Implementation of sliding mode control system for generator and grid sides control of wind energy conversion system. IEEE Trans. Sustain. Energy 2016, 7, 1327–1335. [Google Scholar] [CrossRef]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2010, 58, 600–610. [Google Scholar] [CrossRef]
- Jeeranantasin, N.; Nungam, S. New sliding mode control of a three-phase AC/DC converter with exponential rate reaching law. In Proceedings of the 2018 International Electrical Engineering Congress (iEECON), Krabi, Thailand, 7–9 March 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, Z.; Han, J.; Jiang, W. Sliding mode control of permanent magnet generator system based on improved exponential rate reaching law. IET Electr. Power Appl. 2020, 14, 1154–1162. [Google Scholar] [CrossRef]
- Mozayan, S.M.; Saad, M.; Vahedi, H.; Fortin-Blanchette, H.; Soltani, M. Sliding mode control of PMSG wind turbine based on enhanced exponential reaching law. IEEE Trans. Ind. Electron. 2016, 63, 6148–6159. [Google Scholar] [CrossRef]
- Joo, Y.H.; Antonysamy, R.; Ramasamy, T.; Lee, S.R. Stable maximum power extraction and DC link voltage regulation for PMVG-based WECS. IEEE Trans. Ind. Electron. 2022. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power | 5 kW | Pole-pairs | 10 |
| Air density | 1.225 kg/m | Stator resistance | 0.4 |
| Blade radius | 2.8 m | Stator inductance | 17.5 mH |
| Optimum TSR | Flux linkage | 0.4459 wb | |
| Maximum power coefficient | Grid-side voltage | 220 V | |
| Inertia coefficient | 0.18 kg·m | DC-link voltage reference | 350 V |
| Viscous coefficient | 0.0004924 N·m·s | DC-link capacitance | 415 F |
| Cut-in wind speed | 3 m/s | Grid-side frequency | 60 Hz |
| Rated wind speed | 9 m/s | Grid-side filter inductance | 6 mH |
| Cut-out wind speed | 15 m/s | Switching frequency | 10 kHz |
| Test Conditions | Control Methods | Overshoot (%) | Convergence Time (s) |
|---|---|---|---|
| System start-up | PI | 24.57 | 0.21 |
| SMC-CPPRL | 21.43 | 0.182 | |
| SMC-ERL | 20 | 0.16 | |
| Proposed SMC-HRL | 19 | 0.13 | |
| Step-change in DC-link reference | PI | 1.39 | 0.12 |
| SMC-CPPRL | 1.81 | 0.09 | |
| SMC-ERL | 1.67 | 0.06 | |
| Proposed SMC-HRL | 0.28 | 0.01 | |
| Wind variation (step-change profile) | PI | 2 | 0.19 |
| SMC-CPPRL | 1.71 | 0.15 | |
| SMC-ERL | 1.14 | 0.12 | |
| Proposed SMC-HRL | 0.86 | 0.09 | |
| Grid-side fault | PI | 1.0 | 0.31 |
| SMC-CPPRL | 0.57 | 0.26 | |
| SMC-ERL | 0.71 | 0.22 | |
| Proposed SMC-HRL | 0.43 | 0.18 |
| Control Methods | Overshoot (%) | Convergence Time (s) |
|---|---|---|
| PI | 4.57 | 1.7 |
| SMC-CPPRL | 4 | 0.8 |
| SMC-ERL | 2.57 | 0.75 |
| Proposed SMC-HRL | 1.43 | 0.3 |
| Control Methods | Test Condition | Overshoot (%) | Test Condition | Undershoot (%) |
|---|---|---|---|---|
| PI | 2.5 | 2.29 | ||
| SMC-CPPRL | Step-change in | 1.94 | Wind speed | - |
| SMC-ERL | DC-link reference | 1.11 | variation | - |
| Proposed SMC-HRL | 0.69 | 1.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramasamy, T.; Abdul Basheer, A.; Tak, M.-H.; Joo, Y.-H.; Lee, S.-R. An Effective DC-Link Voltage Control Strategy for Grid-Connected PMVG-Based Wind Energy Conversion System. Energies 2022, 15, 2931. https://0-doi-org.brum.beds.ac.uk/10.3390/en15082931
Ramasamy T, Abdul Basheer A, Tak M-H, Joo Y-H, Lee S-R. An Effective DC-Link Voltage Control Strategy for Grid-Connected PMVG-Based Wind Energy Conversion System. Energies. 2022; 15(8):2931. https://0-doi-org.brum.beds.ac.uk/10.3390/en15082931
Chicago/Turabian StyleRamasamy, Thirumoorthy, Ameerkhan Abdul Basheer, Myung-Hwan Tak, Young-Hoon Joo, and Seong-Ryong Lee. 2022. "An Effective DC-Link Voltage Control Strategy for Grid-Connected PMVG-Based Wind Energy Conversion System" Energies 15, no. 8: 2931. https://0-doi-org.brum.beds.ac.uk/10.3390/en15082931