
GK-SPSA-Based Model-Free Method for Performance Optimization of Steam Generator Level Control Systems
Abstract
:1. Introduction
- Experience-based methods. These methods heavily rely on the engineer’s expertise. They operate without depending on the controller-performance model and instead directly seek the optimal settings through a model-free method. These can be categorized as “Fundamental model-free techniques” encompassing methods such as trial and error, the Design of Experiments (DOE), and expert system-based control. These methods offer the benefit of straightforward implementation. However, their drawbacks are evident, as they heavily depend on operator or expert knowledge, are laborious and time-intensive, and it can be challenging to ascertain the true optimal settings [10,14].
- Model-based methods. Engineers should first obtain a suitably precise model to represent the relationship between parameters and performance. Following that, a tuning formula can be devised using this model. Ultimately, the selection of parameters can be influenced by the model coefficients and the formula [15,16,17,18]. However, accurately determining the relationship between parameters and performance in complex industrial systems can be challenging, making it very difficult to apply this method to the SGLCS.
- Model-free methods. Unlike model-based optimization methods, this method does not rely on the issue of model reliability. However, because of the unique nature of this approach, which does not necessitate the construction of an objective function model, it often needs more experimental data to find the optimal solution. This process may require additional computational resources and time. This drawback can make the parameter-setting process quite tedious, ultimately leading to poorer control performance [16]. However, Geng et al. proposed a variety of intelligent optimizations without model methods and applied them in the performance-optimization process of the SGLCS in nuclear power plants. Based on simulation experiments, it is shown that these optimization methods can obtain better control performance. However, this method requires a large number of simulation experiments and cannot be optimized online in the nuclear power plant site [19]. Kong et al. presented a structured and effective optimization method based on Simultaneous Perturbation Stochastic Approximation (SPSA) for the control of steam generator levels and the quality control of injection molding [20]. Through experimental validation, they demonstrated that this method is a fast, cost-effective, and highly efficient parameter-tuning method.
2. Performance Optimization of the SGLCS
- (1)
- Optimization method
- (2)
- Performance evaluation
3. GK-SPSA-Based Model-Free Optimization
3.1. The Fusion Method of Process Knowledge and MFO
3.2. GK-SPSA Strategy
3.3. Iteration Termination Control
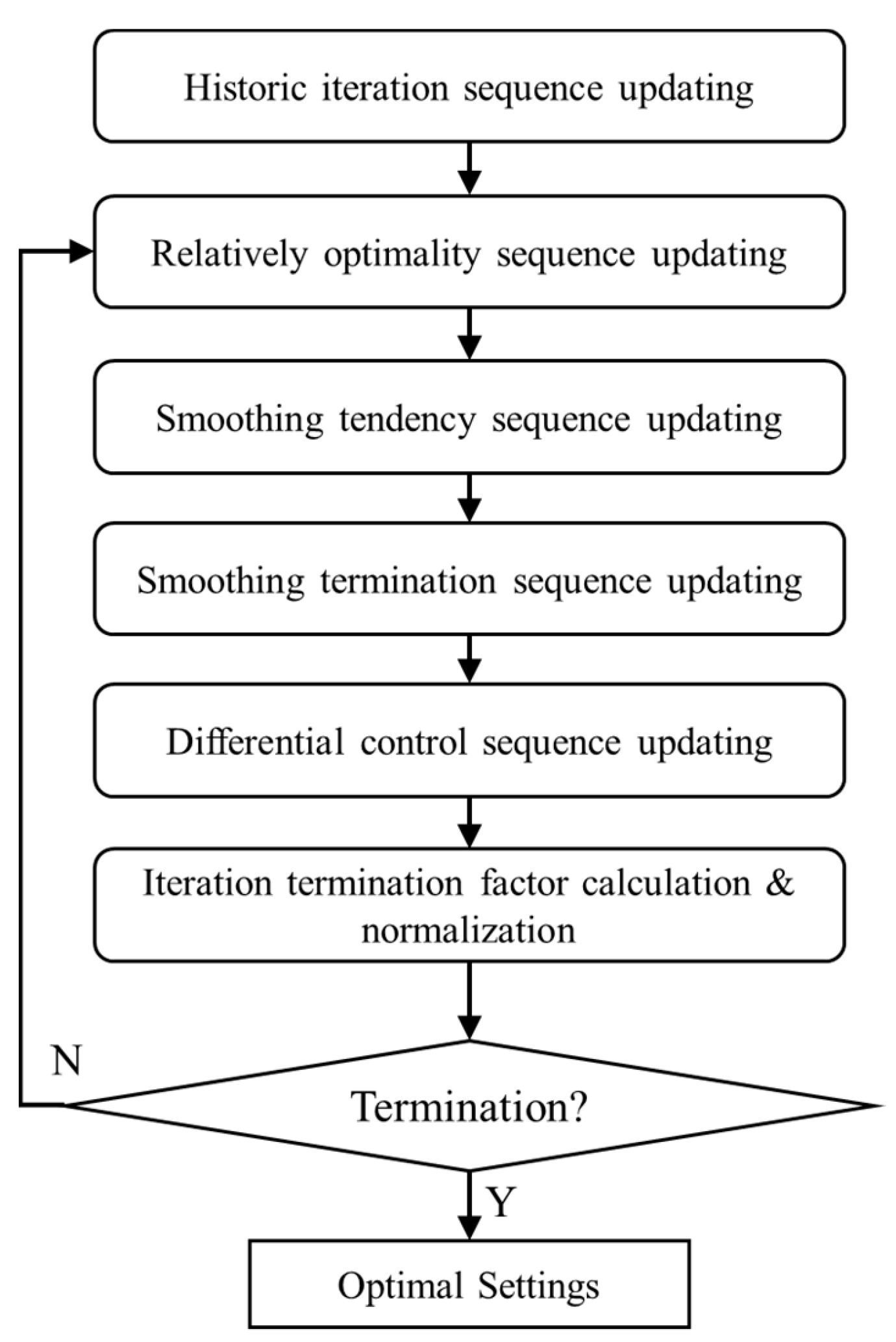
- Step1: Historic iteration sequence updating. Visualizing the data corresponding to historical iteration points and the current iteration point lays the foundation for iteration termination control.
- Step2: Relatively optimality sequence updating. Because model-free optimization involves randomness, it can have a detrimental impact on the assessment of convergence. This step involves a simple ranking of the loss function values corresponding to historical iteration points, thereby creating a relatively optimal sequence. It eliminates the interference caused by randomness in the assessment of convergence.
- Step3: Smoothing tendency sequence updating. Conduct a global analysis of the optimization process using the relatively optimal sequence obtained in step 2. Update the iteration sequence through a smooth average method to better represent the optimization progress.
- Step4: Smoothing termination sequence updating. Using historical data from the iteration process, transform the iteration sequence obtained in step 3 into a smoothing tendency sequence that better reflects the optimization process trend.
- Step5: Differential control sequence updating. Convert the smoothing tendency sequence into a differential sequence and then assess the relative progress of the optimization process.
- Step6: Iteration termination factor calculation. Use the ratio of the improvement value at the current iteration point to the loss function value at the current iteration point as the iteration termination factor, and decide whether to terminate the iteration process based on the evaluation of this iteration factor. The primary objective of this study is to introduce the GK-SPSA algorithm into the performance-optimization process of the SGLCS. For a specific description of the iteration termination criterion, please refer to the reference [19]. The specific method is shown in Figure 7.
4. Results and Discussion
4.1. Experimental Setup
4.2. Effectiveness Test
- (1)
- Trajectories of iteration
- (2)
- Trajectories of step size change
- (3)
- Parameter change trajectory
- (4)
- Level change curve before and after optimization
4.3. Efficiency Test
- (1)
- Comparison of the number of iterations
- (2)
- Comparison of iteration final values
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SG | Steam Generator |
| NPP | Nuclear Power Plant |
| SGLCS | Steam Generator Level Control System |
| MFO | Model-Free Optimization |
| SPSA | Simultaneous Perturbation Stochastic Approximation |
| GK-SPSA | Knowledge-informed SPSA based on Historical Gradient |
| DOE | Design of Experiments |
| DCS | Distributed Control System |
| CSPGA | Current Simultaneous Perturbation Gradient Approximation |
| CGA | Composite Gradient Approximation |
| SI | Status Indicator |
| PID | Proportional-Integral-Derivative |
| ITAE | Integral Time Absolute Error |
References
- Wang, N.; Zhu, J.M.; Hu, Y.S.; Zhang, W.; Chen, T.M. Study on the False Water Level Phenomenon of the Steam Generator and SG Water Level Control. Nucl. Sci. Eng. 2022, 42, 1077–1084. [Google Scholar]
- Kong, D. Long-term Operation Practice of Qinshan Nuclear Power Plant. Nucl. Power Eng. 2022, 43, 1–6. [Google Scholar]
- Zubair, M.; Zhang, Z.; Khan, S.U.D. Calculation and updating of reliability parameters in probabilistic safety assessment. J. Fusion Energy 2011, 30, 13–15. [Google Scholar] [CrossRef]
- He, X.; Tong, J.; Chen, J. Maintenance risk management in Daya Bay nuclear power plant: PSA model, tools and applications. Prog. Nucl. Energy 2007, 49, 103–112. [Google Scholar] [CrossRef]
- Espín, J.; Estrada, S.; Benítez, D.; Camacho, O. A hybrid sliding mode controller approach for level control in the nuclear power plant steam generators. Alex. Eng. J. 2023, 64, 627–644. [Google Scholar] [CrossRef]
- Ma, S. Trip analysis and online diagnosis regulation for loosing water level control of the PWR steam generator. Chin. J. Nucl. Sci. Eng. 2009, 29, 328–340. [Google Scholar]
- Irving, E.; Miossec, C.; Tassart, J. Towards efficient fully automatic operation of the PWR steam generator with water level adaptive control. In Proceedings of the 2nd International Conference, Bournemouth, UK, 23–25 October 1979. [Google Scholar]
- Salehi, A.; Safarzadeh, O.; Kazemi, M.H. Fractional order PID control of steam generator water level for nuclear steam supply systems. Nucl. Eng. Des. 2019, 342, 45–59. [Google Scholar] [CrossRef]
- Chen, H.; Zeng, J.; Wang, G. Steam Generator Water Level Control Based on Active Disturbances Rejection Control. Proc. Chin. Soc. Electr. Eng. 2010, 30, 103–107. [Google Scholar]
- Kong, X.S. Model-Free Optimization for a Type of Batch Processes with a Short Cycle Time and Low Operational Cost. Ph.D. Thesis, Zhejiang University, Hangzhou, China, June 2011. [Google Scholar]
- Wu, S.; Wang, P.; Wan, J.; Wei, X.; Zhao, F. Parameter optimization for AP1000 steam generator feedwater control system using particle swarm optimization algorithm. In Proceedings of the International Conference on Nuclear Engineering, Charlotte, NC, USA, 26–30 June 2016. [Google Scholar]
- Zheng, Y.; Zhang, Y.; You, K.; Zhao, M.; Li, Y.; Chen, G.; Yan, X. Research on Improved Auto-Tuning of a PID Controller Based on Phase Angle Margin. Nucl. Power Eng. 2020, 41, 108–113. [Google Scholar]
- Yu, Z.; Shi, C.; Zhu, L. Simulation research on level control system of steam generator. Appl. Sci. Technol. 1988, 53, 6–16. [Google Scholar]
- Hu, K.K.; Liu, X.P.; Cai, H.B.; Tan, W.S. Optimization of avian influenza vaccine production process based on Box-Behnken experimental design and response surface method. J. Chem. Eng. Chin. Univ. 2019, 33, 394–399. [Google Scholar]
- Åström, K.J.; Hägglund, T. The future of PID control. Control. Eng. Pract. 2001, 9, 1163–1175. [Google Scholar] [CrossRef]
- Qiu, L.; Huo, Y.; Zhang, R.; Wang, H.; Jiang, G.; Sun, P.; Wei, X. Research on fuzzy weighted gain scheduling water level control system of U-tube steam generator. Ann. Nucl. Energy 2023, 187, 109812. [Google Scholar] [CrossRef]
- Zhuang, M.; Atherton, D. Automatic tuning of optimum PID controllers. IEE Proc. D Control Theory Appl. 1993, 140, 216–224. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Chai, T. A survey of advanced PID parameter tuning methods. Acta Autom. Sin. 2000, 26, 347–355. [Google Scholar]
- Geng, P.; Kong, X.; Shi, C.; Liu, H.; Liu, J. IK-SPSA based Performance Optimization Strategy for Steam Generator Level Control System of Nuclear Power Plant. Energies 2022, 15, 7387. [Google Scholar] [CrossRef]
- Kong, X.; Guo, J.; Zheng, D.; Zhang, J.; Fu, W. Quality Control for Medium Voltage Insulator via a Knowledge-Informed SPSA Based on Historical Gradient Approximations. Processes 2020, 8, 146. [Google Scholar] [CrossRef]
- Zhu, X.; Spall, J.C. A modified second-order SPSA optimization algorithm for finite samples. Int. J. Adapt. Control Signal Process. 2002, 16, 397–409. [Google Scholar] [CrossRef]
- Jiang, S.B. Data-Driven Based Performance Optimization Method for Steam Generator Liquid Level Control System. Master’s Thesis, Xiamen University of Technology, Xiamen, China, 5 April 2021. [Google Scholar]
- Zhou, G.; Tan, D. Review of nuclear power plant control research: Neural network-based methods. Ann. Nucl. Energy 2023, 181, 109513. [Google Scholar] [CrossRef]
- Kong, X.; Shi, C.; Liu, H.; Geng, P.; Liu, J.; Fan, Y. Performance Optimization of a Steam Generator Level Control System via a Revised Simplex Search-Based Data-Driven Optimization Methodology. Processes 2022, 10, 264. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Feasible Range of Parameters |
|---|---|---|
| X1 | kP of the PR | [0.077, 0.3] |
| X2 | kI of the PR | [2.3 × 10−4, 2.3 × 10−3] |
| X3 | kD of the PR | [−0.6, 2.65] |
| X4 | kP of the AR | [1, 1.5] |
| X5 | kI of the AR | [0.3, 0.8] |
| X6 | kD of the AR | [0, 0.5] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Yang, Z.; Yang, Y.; Kong, X.; Shi, C.; Shi, J. GK-SPSA-Based Model-Free Method for Performance Optimization of Steam Generator Level Control Systems. Energies 2023, 16, 8050. https://0-doi-org.brum.beds.ac.uk/10.3390/en16248050
Li X, Yang Z, Yang Y, Kong X, Shi C, Shi J. GK-SPSA-Based Model-Free Method for Performance Optimization of Steam Generator Level Control Systems. Energies. 2023; 16(24):8050. https://0-doi-org.brum.beds.ac.uk/10.3390/en16248050
Chicago/Turabian StyleLi, Xiaoyu, Zean Yang, Yongkuan Yang, Xiangsong Kong, Changqing Shi, and Jinguang Shi. 2023. "GK-SPSA-Based Model-Free Method for Performance Optimization of Steam Generator Level Control Systems" Energies 16, no. 24: 8050. https://0-doi-org.brum.beds.ac.uk/10.3390/en16248050