In this section, the proposed SSAGWO algorithm performance is first evaluated by comparing it with SSA and GWO algorithms in terms of statistical findings using five well-known benchmark functions from the literature. Furthermore, the proposed SSAGWO-tuned PID controller is analyzed for a two-area multi-source interconnected power system. The proposed SSAGWO optimized PID controller results are compared with SSA and GWO techniques. The obtained results for benchmark functions and various scenarios of the system model considered are discussed in detail in the following sections.
5.1. Validation of Benchmark Functions
Six classical benchmark functions with a wide range of characteristics are used to compare the proposed SSAGWO algorithm’s performance to that of GWO and SSA algorithms. The description of the benchmark functions used to verify the performance of various hybrid SSAGWO algorithms is shown in
Table 2. When referring to
Table 2, the letter U indicates that the benchmark functions F1–F4 have a single global best and are unimodal. A function is said to be separable if and only if the letter S appears after the letter U in the notation. While if the letter N is written after the letter U, then the function is non-separable [
3]. The exploitation ability of the optimization algorithm is investigated by the F1–F4 unimodal benchmark functions, as shown in
Table 2, and they indicate that a robust local search capability is necessary for achieving good results. F5 and F6 are multimodal functions. These functions have multiple global bests and are used to investigate the optimization algorithm’s exploration ability. The multimodal functions are denoted with the letter M as shown in
Table 2. The multimodal functions are also classified into separable and non-separable functions.
Table 3 illustrates the statistical results of the optimization algorithm on the conventional benchmark functions. The results are compared based on the mean, minimum, and standard deviation of reaching the best values. The results were recorded for each algorithm 30 times running. Different benchmark functions are used to assess the algorithms GWO and SSA with SSAGWO by suggesting the algorithm population of 30 and 100 as a number of iterations. The results in
Table 3 show that the SSAGWO has improved the exploration and exploitation ability compared with other optimization techniques. SSAGWO has mean, min, and standard deviation less than other algorithms.
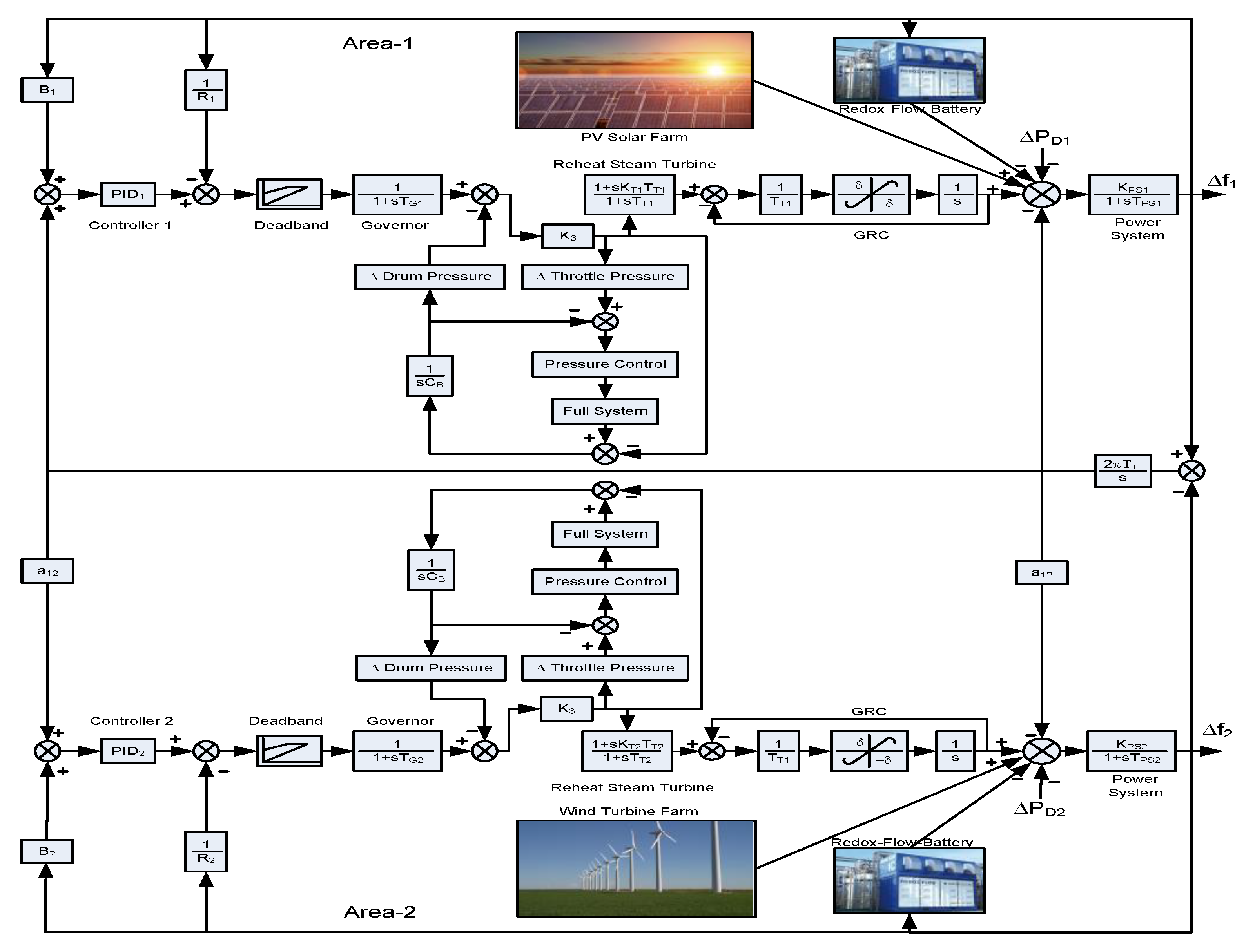
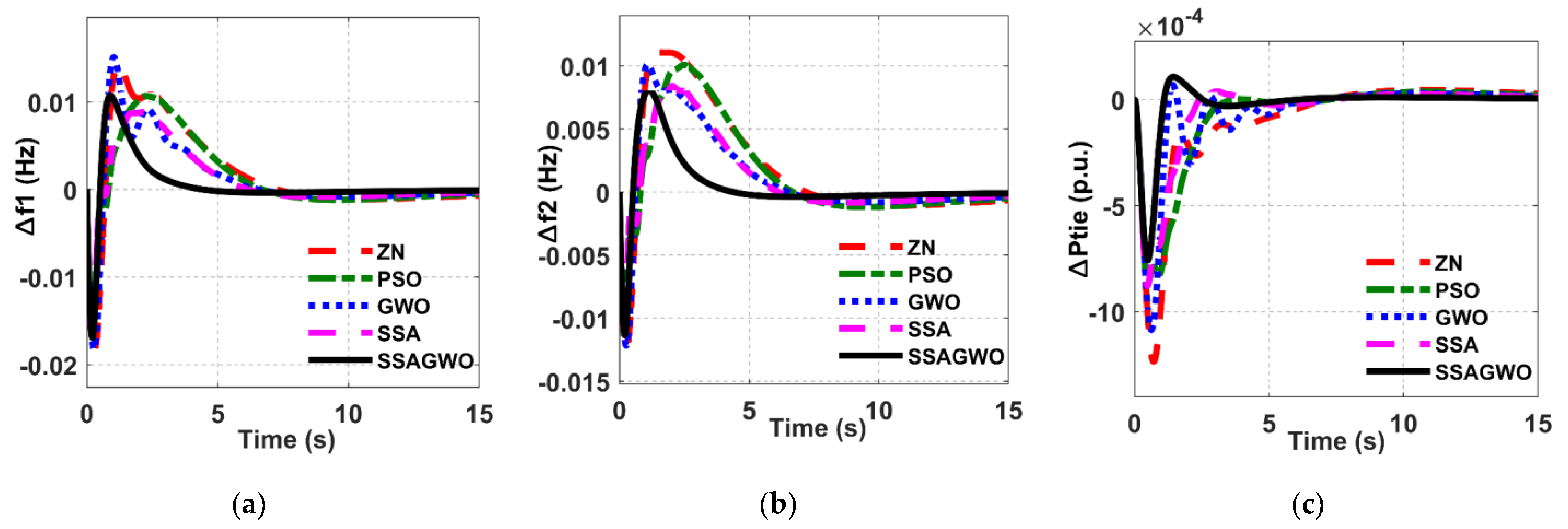
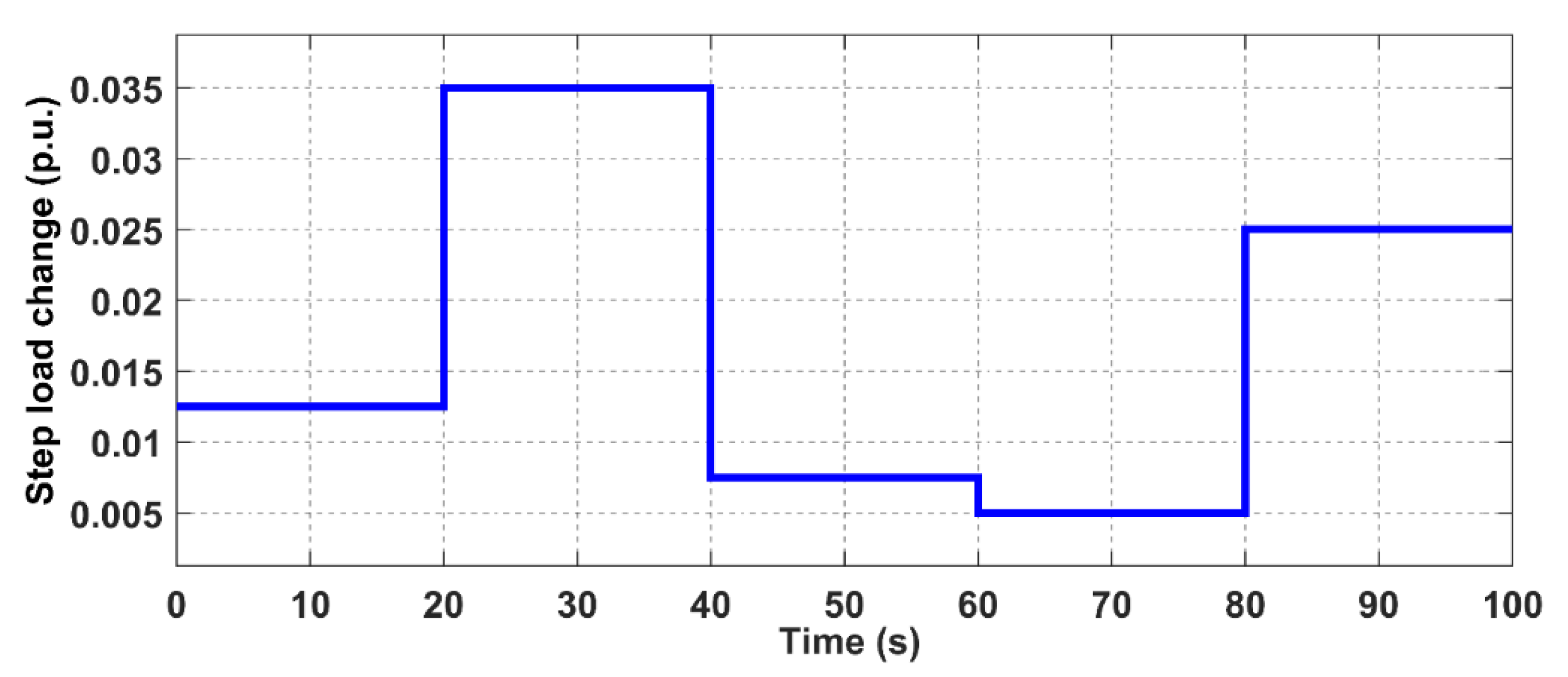
Three cases are presented to analyze the time domain response of the HPS as follows. Case I: In this case, area 1 is integrated with an SPV source, and area 2 is integrated with a WPG source. A step load change of 50 MW and 35 MW of the rated power system occurs in area 1 and area 2, respectively.
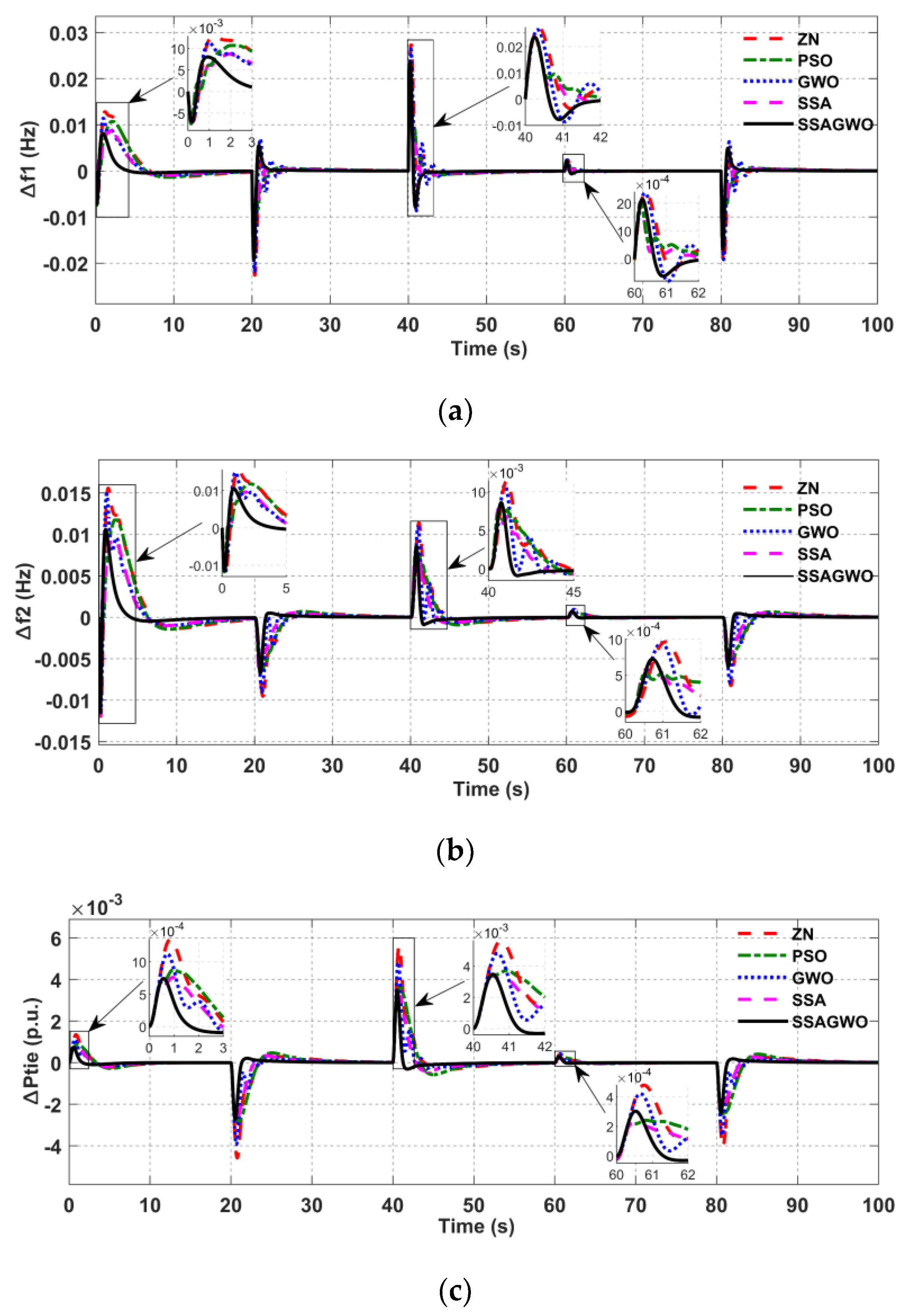
Figure 8 shows the frequency deviation of four optimization techniques for tuning PID controller parameters (PSO, GWO, SSA, and SSAGWO) and the Z–N technique. It is clear from the figure that the ST of the proposed SSAGWO-optimized PID controller is much faster than the other optimization-tuned PID controller and Z–N-tuned PID controller.
Table 4 shows the results of the frequency deviation of area 1 and area 2 and the power deviation in the tie-line power. The ST of the proposed technique is improved by 75.06%, 74.29%, 71.60%, and 71.04% over Z–N, PSO, GWO, and SSA, respectively. Moreover, the RT of the frequency deviation of the proposed algorithm is less than other techniques by 85.18%, 78.54%, 73.65%, and 67.38%, respectively. In addition, the value of the undershoot of the frequency deviation is less than other techniques by 9.19%, 0.59%, 7.69%, and 0.59%, respectively. Furthermore, the results show that the steady-state error of the power system frequency when using the proposed SSAGWO is less by 85.06%, 78.49%, 73.60%, and 67.34%, respectively, than when using the other optimization techniques mentioned above. Furthermore, the steady-state values of the performance indices of the frequency deviation are improved by 30.43%, 70.45%, 39.50%, and 64.08% for the ISE, ITSE, IAE, and ITAE, respectively, compared with the best performance index of the optimization techniques presented in
Table 5. Moreover, the proposed algorithm reduces the controller efforts by 40.67%, 18.60%, 51.70%, and 9.85% for Z–N, PSO, GWO, and SSA, respectively.
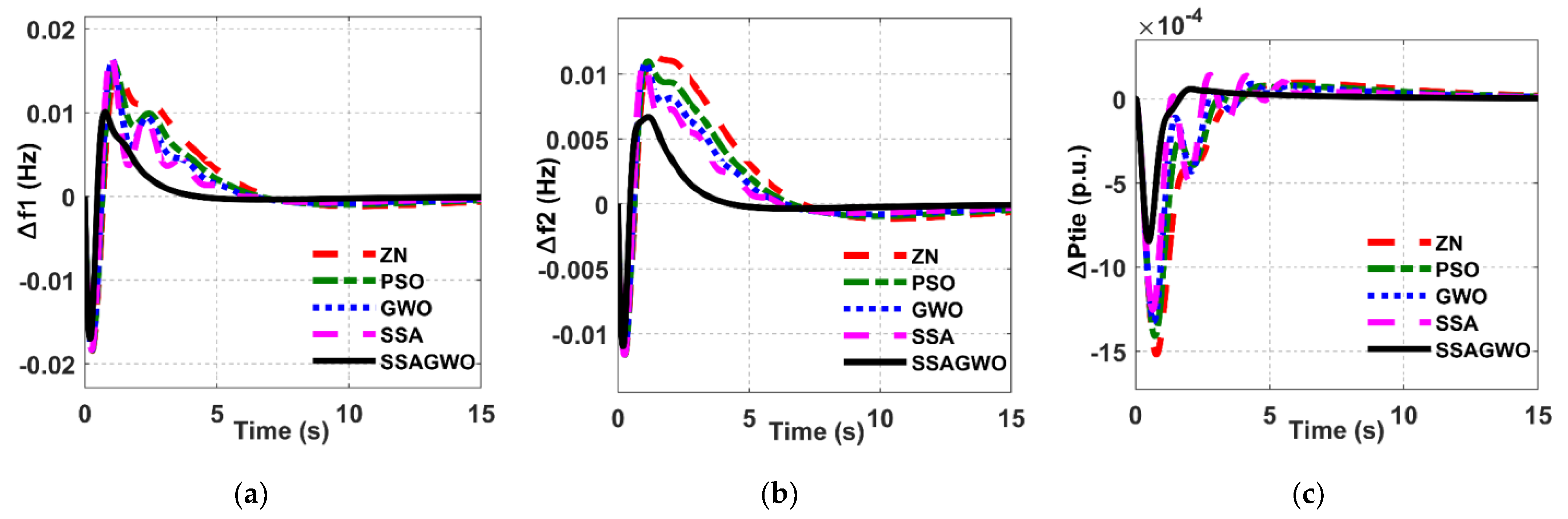
Case II: In this case, area 1 and area 2 are integrated with SPV resources. The step change in demand load applied in case II is similar to that of case I.
Figure 9 shows the frequency deviation of the two areas and the power deviation in tie-line power for tuning PID parameters of the proposed SSAGWO compared with PSO, GWO, and SSA and the Z–N technique.
Figure 9 demonstrates that the ST of the proposed SSAGWO-optimized PID controller is significantly less than that of the other optimization-tuned PID controllers and the Z–N-tuned PID controller. The results of the frequency deviation and tie-line power of case II are shown in
Table 6. The ST of the proposed algorithm has been enhanced by 75.94%, 74.23%, 72.53%, and 70.83% compared with the ST of Z–N, PSO, GWO, and SSA, respectively. In addition, the RT of the frequency deviation of the proposed SSAGWO is less than other techniques by 85.63%, 80.60%, 75.24%, and 69.86%, respectively. Moreover, the peak undershoots value of the frequency deviation is less than other techniques by 8.15%, 8.15%, 7.65%, and 7.65%, respectively. Furthermore, the results shown in
Table 6 depict that the steady-state error of the frequency deviation of the power system is less than other techniques by 85.93%, 80.54%, 75.20%, and 69.83%, respectively, when using the proposed SSAGWO to tune PID controller parameters.
The steady-state values of the ISE, ITSE, IAE, and ITAE all improve when using the proposed SSAGWO upon the best performance index of the optimization strategies shown in
Table 7 by 57.57%, 74.42%, 46.93%, and 62.58%, respectively. Moreover, the controller effort was reduced by 45.20%, 52.83%, 57.66%, and 60.66%, respectively, when using SSAGWO compared with other optimization techniques.
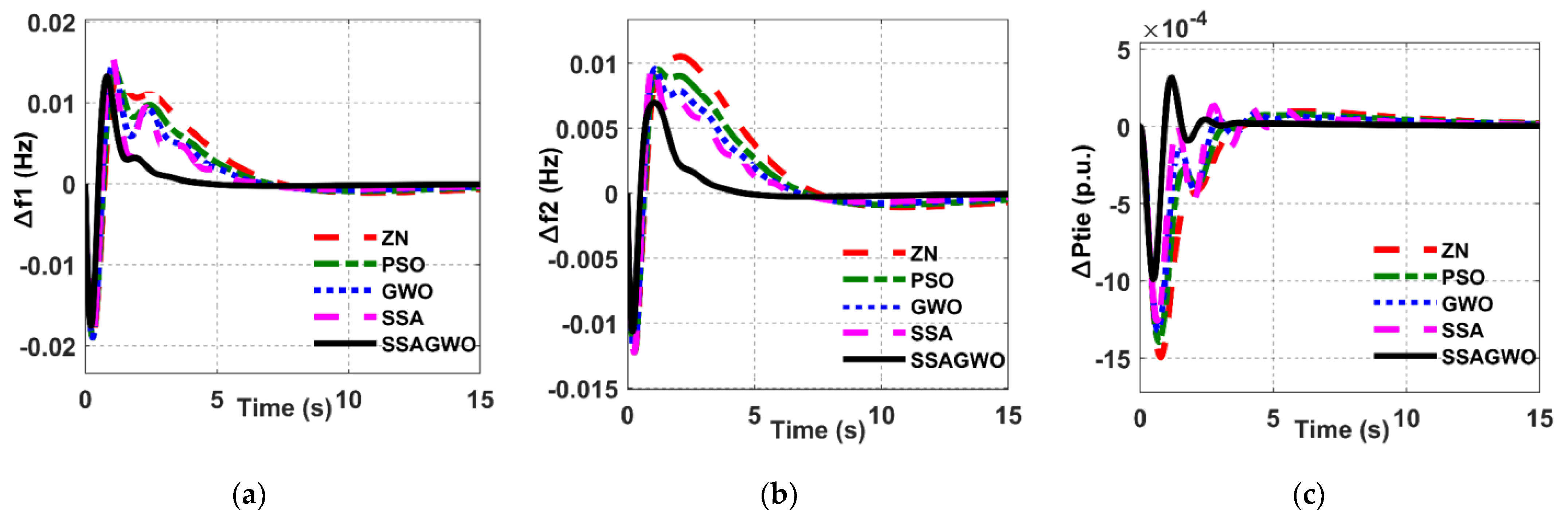
Case III: In this case, WTPG resources are integrated into both areas 1 and area 2.
Figure 10 shows the frequency deviation and tie-line power of the HPS model. The figures show that the ST of the frequency deviation when using SSAGWO is less than the other optimization-tuned PID controller parameters mentioned above. The detailed results of this case are shown in
Table 7. With the same sequence of comparing the proposed SSAGWO with other optimization techniques illustrated in case I and case II, the ST was improved by 75.40%, 73.66%, 71.88%, and 70.03%, respectively. In addition, the RT of the frequency deviation was reduced by 88.10%, 84.01%, 79.56%, and 75.15%, respectively. There is also a reduction in the peak undershoot value of the frequency deviation of 8.37%, 7.89%, 7.89%, and 7.41, respectively, compared to the other techniques.
Table 8 further demonstrates that using the proposed SSAGWO to tune PID controller parameters decreased the steady-state error of the frequency deviation of the power system by 88.41%, 83.97%, 79.52%, and 75.10%, respectively.
Compared to the best performance index of the optimization strategies presented in
Table 9, the proposed SSAGWO improves the steady-state values of the ISE, ITSE, IAE, and ITAE by 50%, 74.42%, 49.88%, and 68.96%, respectively. In addition, SSAGWO reduced controller effort by 20.17%, 31.57%, 40.82%, and 19.48%, respectively, compared to other optimization methods.
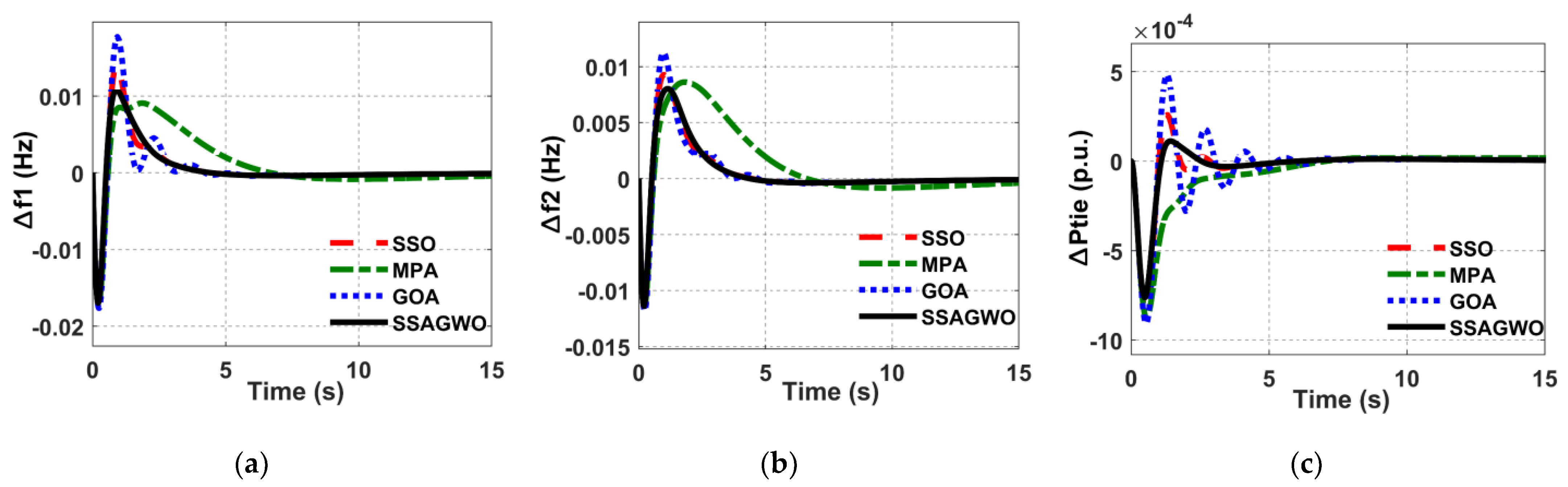
A comparison of the performance of the proposed hybrid SSAGWO optimization technique with the performance of the Grasshopper Optimization Algorithm (GOA) [
17], Marine Predator Algorithm (MPA) [
20], and Salp Swarm Optimization (SSO) [
25] has been implemented in order to demonstrate the robustness of the suggested approach. Within the context of this discussion, case I has been utilized as a case study.
Figure 11 depicts the dynamic response of the HPS model to the frequency deviation and the change in tie-line power. When compared with GOA, MPA, and SSO, the results demonstrate that the ST, overshoot, and oscillations of the frequency deviation, as well as the tie-line power, are improved when SSAGWO is utilized.
To study the effectiveness of the proposed algorithm, a random step change in load demand is applied in area 1, as shown in
Figure 12. The frequency response of area 1, area 2, and tie-line power for this scenario are depicted in
Figure 13. According to the findings, the proposed algorithm tunes the PID controller response more quickly for a sudden change in load than other optimization techniques do. Additionally, the power supplied by the tie-line changed in response to the changing load demands of the system while keeping a constant level of output despite these changes.
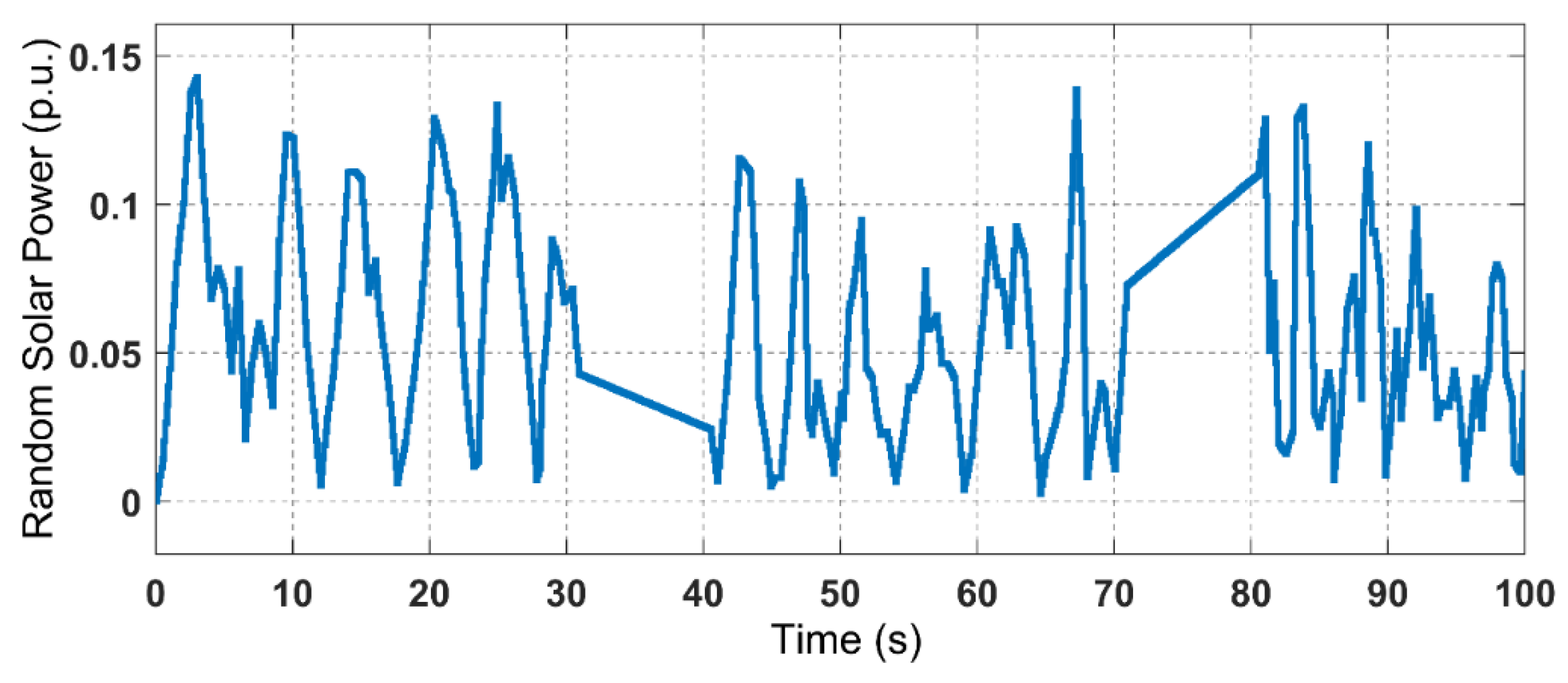
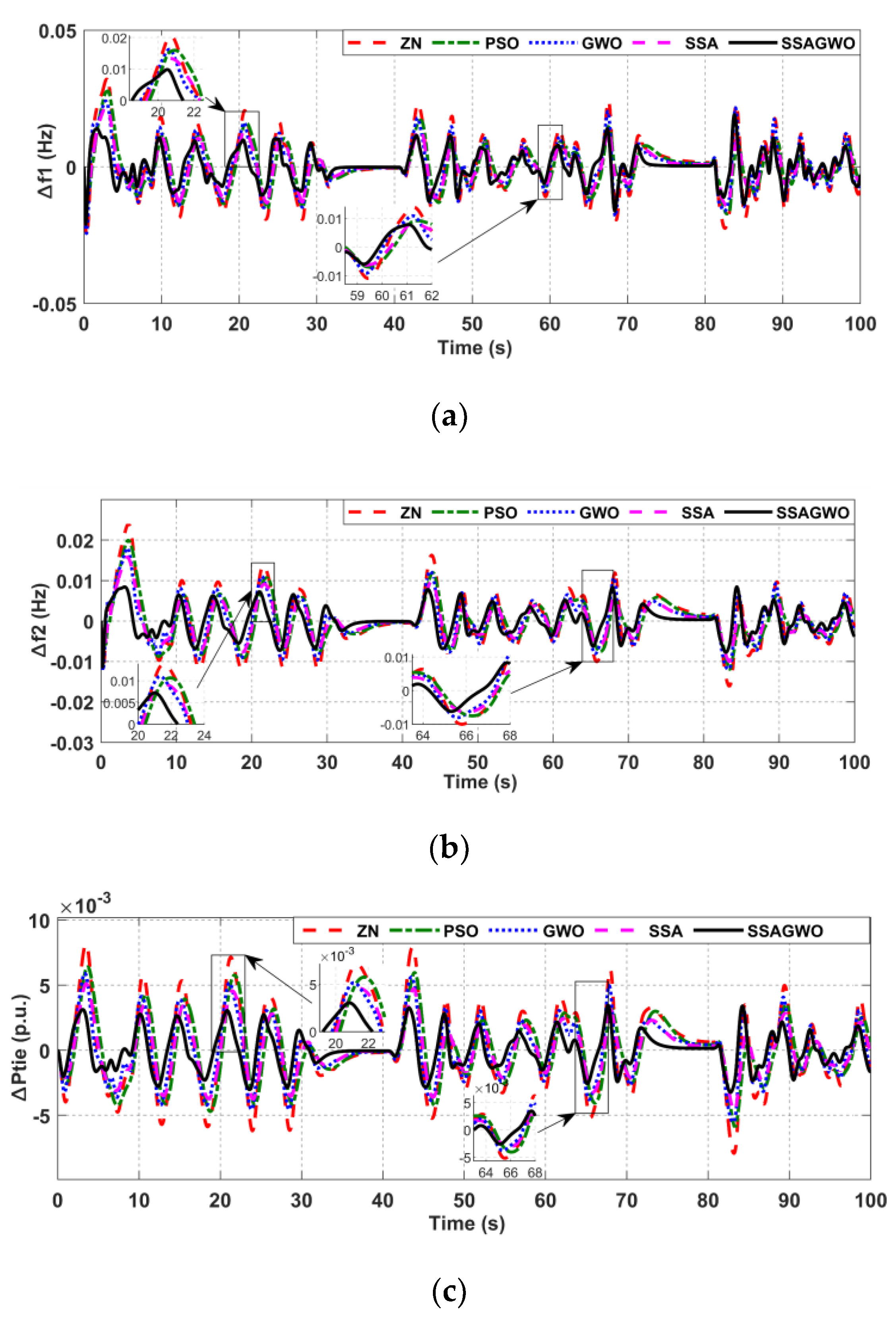
To further prove the robustness of the proposed technique, solar radiation data collected at Universiti Putra Malaysia, the output power from the SPV, is integrated with area 1 [
3]. As shown in
Figure 14, the solar irradiation values were measured from January through December 2014 for a total of 200 time-slots of 0.5 s. The multi-area power system in case I has been chosen to assess the dynamic response for real-time solar power fluctuations with all optimization techniques used in this study. The frequency deviation of area 1 and area 2 is shown in
Figure 15 for this scenario. It can be deduced that the proffered SSAGWO algorithm-tuned PID controller shows a better and smoother response than other tuning methods, along with minimal undershoot, less ST, RT, steady-state error, and controller efforts.
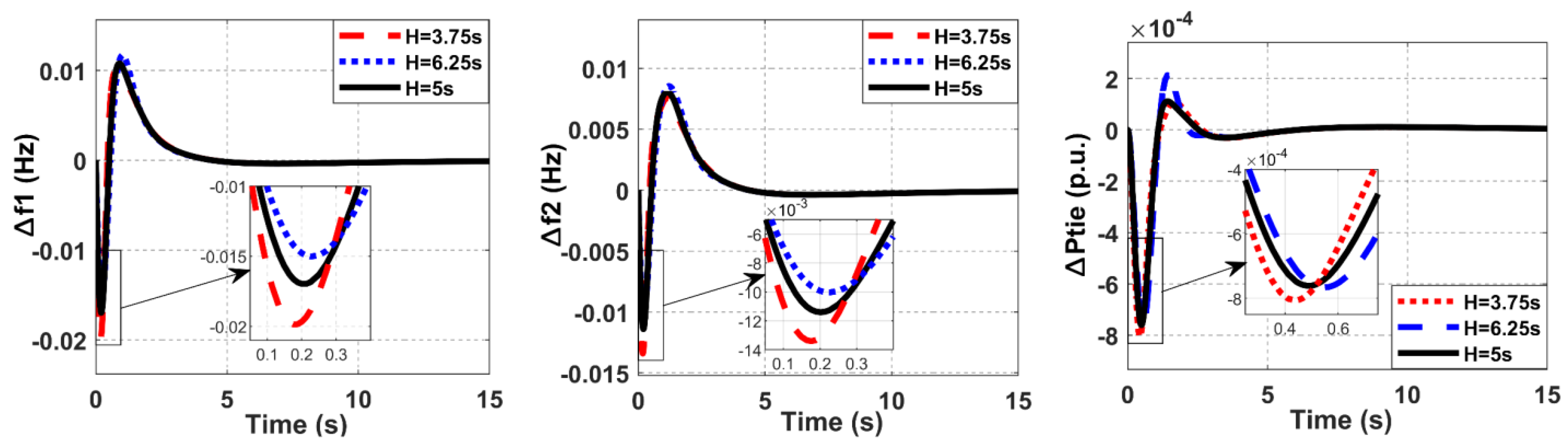
The sensitivity analysis of the proposed controller technique has been performed to prove the robustness of the controller parameters obtained under a variation of the inertia constant and change in the nominal loading of the power system.
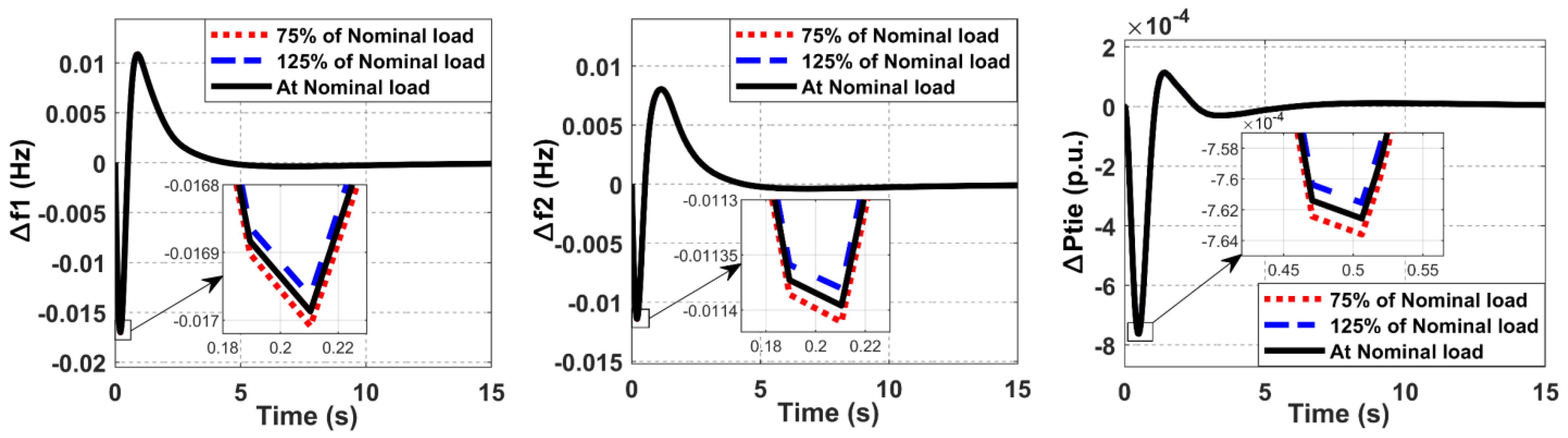
The value of the inertia constant of the power system changed from 75% to 125% of its nominal value (H = 5), and the loading condition changed by ±25% compared with the nominal system loading (50% loading). The controller’s efficacy is demonstrated by using the value of the PID controller parameters under the nominal condition. Changing the inertia constant of the power system will affect the value of the time constant Tps. Likewise, the time constant of the power system block Tps and the gain constant Kps are affected by changes in load conditions.
Figure 16 illustrates the dynamic response of the power system with variation in the inertia constant value.
Figure 17 shows the dynamic response of the power system under change in the nominal loading. The result demonstrates a high tolerance for a wide range of changes in system parameters, as measured by the gain values obtained under nominal conditions. Because of this, one can draw the conclusion that the parameters do not need to be re-tuned even if there is a large amount of change in the system’s conditions and parameters.
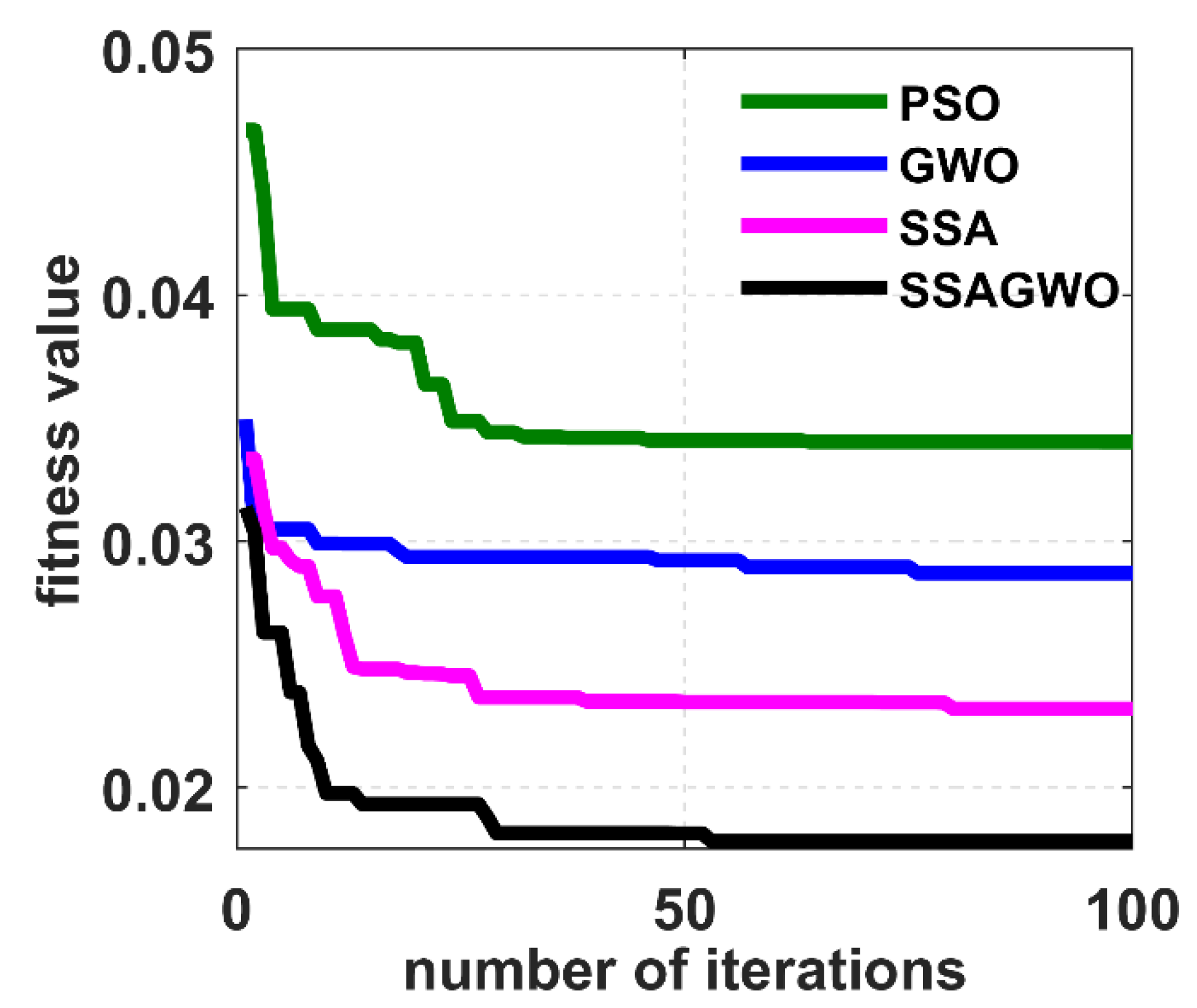
This section presents the convergence curves obtained by the proposed SSAGWO algorithm and other optimization algorithms. The convergence curve showing the minimum ITAE of ACE for the model is presented in
Figure 18. The hybrid SSAGWO approach is shown to converge faster than other optimization methods, proving that the proposed SSAGWO has a better balance between exploration and exploitation than the standard GWO and SSA algorithms.
5.2. Stability Analysis
It is essential to take into consideration the effects of optimization techniques for PID tuning and validation of the stability analysis by calculating the state space of the system based on the Simulink model of the system. To assess the frequency stability of the power system and the HPS model optimized with SSAGWO-tuned PID controller parameters, two scenarios are considered. In scenario 1, Area I is considered as the input signal of the transfer function, while in scenario 2, Area II is considered as the input signal of the transfer function. The state-space equations with estimation of the Close Loop Transfer Function (CLTF) are illustrated as follows:
The vector form of the state variables of the proposed model is present in Equation (12):
System parameters and their associated state variables are shown as below:
where
The state-space equation of the HPS is illustrated as follows:
The state-space modeling of the reheat turbine generator is also derived in Equations (17)–(19):
In general, the state-space of the tie line power can be emulated as follows:
The wind turbine model in state space is given in Equation (21):
The PV model in state space is obtained in Equation (22):
The state-space model of the RFB is shown below:
The general state-space representation is given below:
where
A is the state matrix,
B is the input matrix, and
C is the output matrix. According to the previous mathematical steps,
A,
B, and
C can be calculated.
The control input can be presented as:
The definition of the output matrix of the proposed system is:
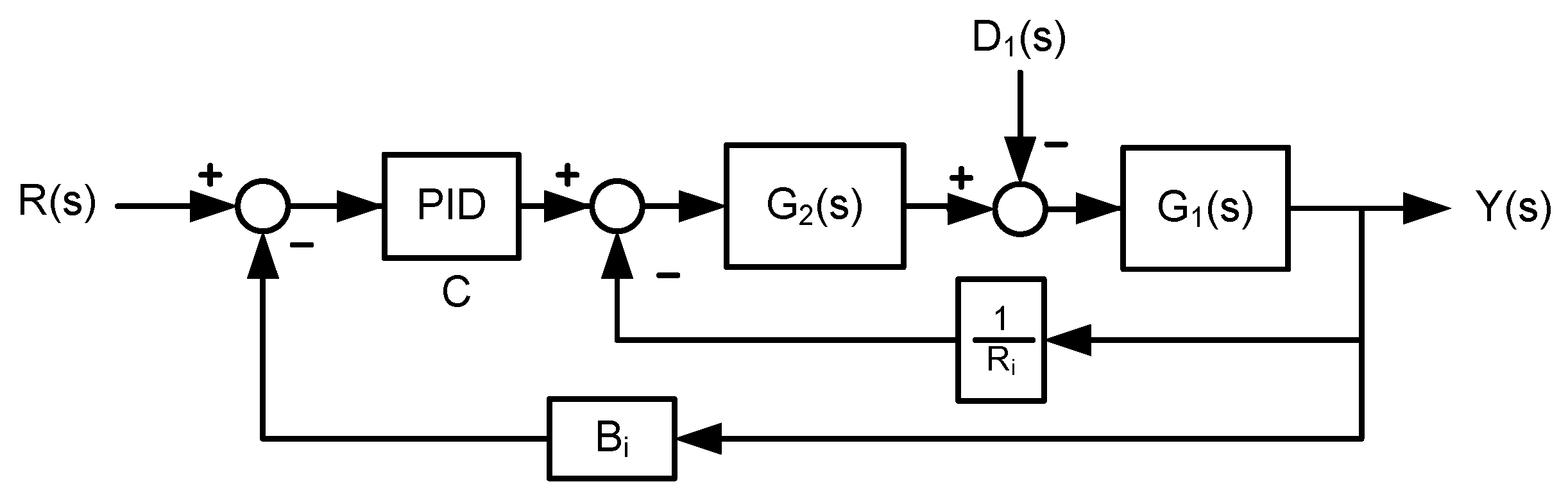
The closed loop control of the HPS shown in
Figure 6, can be simplified as shows in
Figure 19 in order to estimate the CLTF equation:
The derivation of the total response of the closed-loop transfer function of the interconnected power system was modeled with PID controller as the following:
where
The change in load demand (∆P
D) is addressed for using the following expression for the CLTF of the system for the proposed controller:
The CLTF can be applied to variations in tie-line power, as indicated by the definition of power variation:
By using superposition theorem, the CLTF for the total variations of the frequency response can be defined as:
By using the state-space analysis, the CLTF for the two scenarios (i.e., area 1 and area 2) can be presented as:
Appendix B shows the state-space matrix, definition of the num, and den of the proposed power system model.
The proposed SSAGWO-tuned PID controller is of a higher order (11th), making stability analysis challenging. Therefore, the higher-order CLTF is reduced to a second-order transfer function using the Hankel matrix (HM) norm approximation method [
48]. Detailed steps for reducing the higher-order transfer function are given below.
From the state-space in
Appendix B, HM can be obtained. The general form of the HM can be presented as:
The value of
n = 13, therefore the HM is shown in Equation (35), which can be expressed as below:
More detail about the HM technique to reduce the order of the CLTF of the proposed power system model has been given in [
48]. To stabilize power generators, grid frequency should be controlled based on the droop characteristic that relates to the generator output [
49].
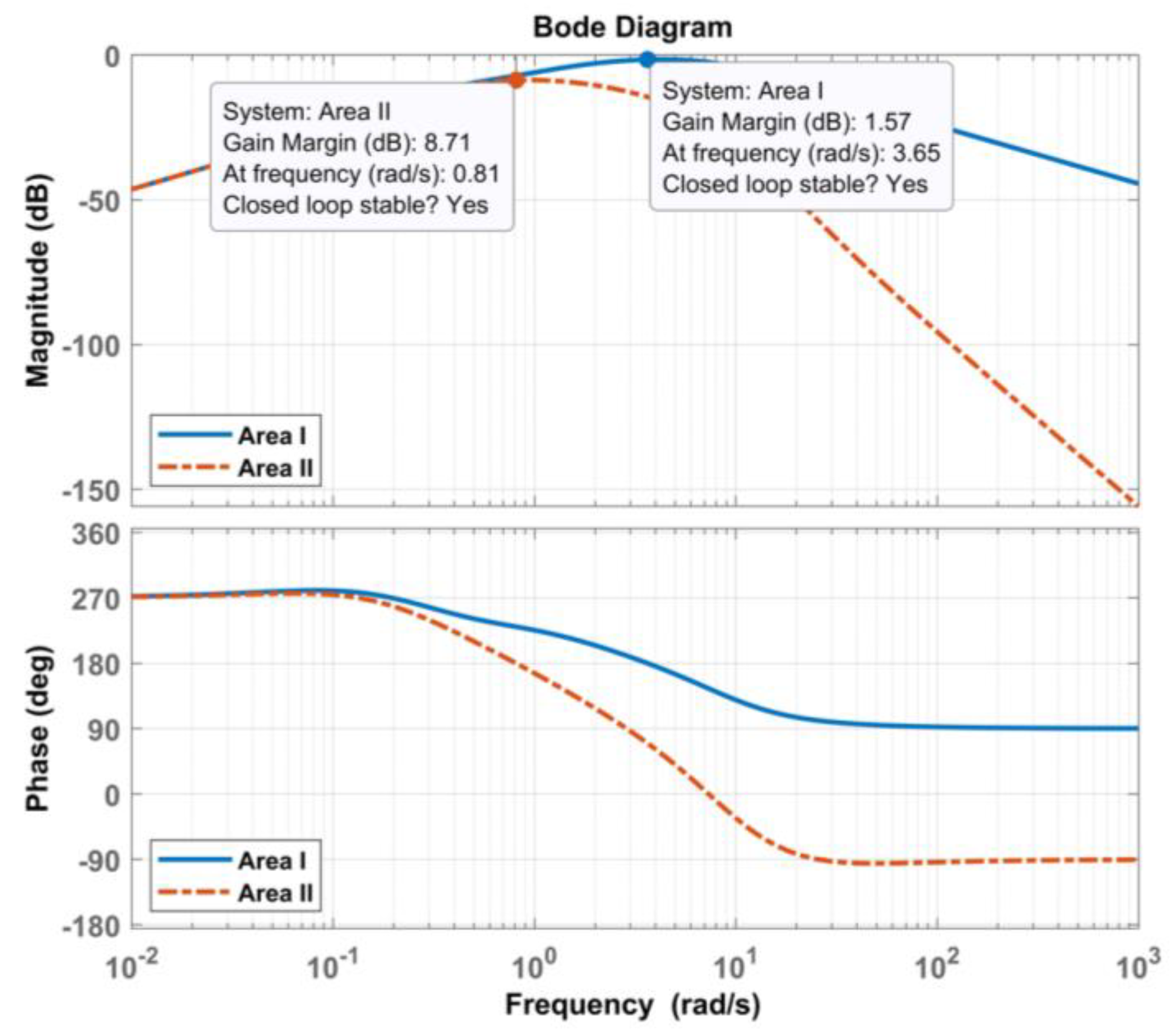
Figure 20 depicts the frequency response of the Bode plot for the HPS model considering the two scenarios proposed in stability analysis, with a gain margin of 1.57 and 8.71 dB and a gain cross-over frequency of 3.65 and 0.81 (rad/s) for Area I and Area II, respectively. According to the Bode analysis response, the closed-loop system for the proposed SSAGWO optimized PID controller of the HPS network is stable.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















