

Architecture for Co-Simulation of Transportation and Distribution Systems with Electric Vehicle Charging at Scale in the San Francisco Bay Area
 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Co-Simulation Setup
2.2. Distribution Grid Simulation
2.3. Distribution Scenarios
2.4. Transportation Simulation
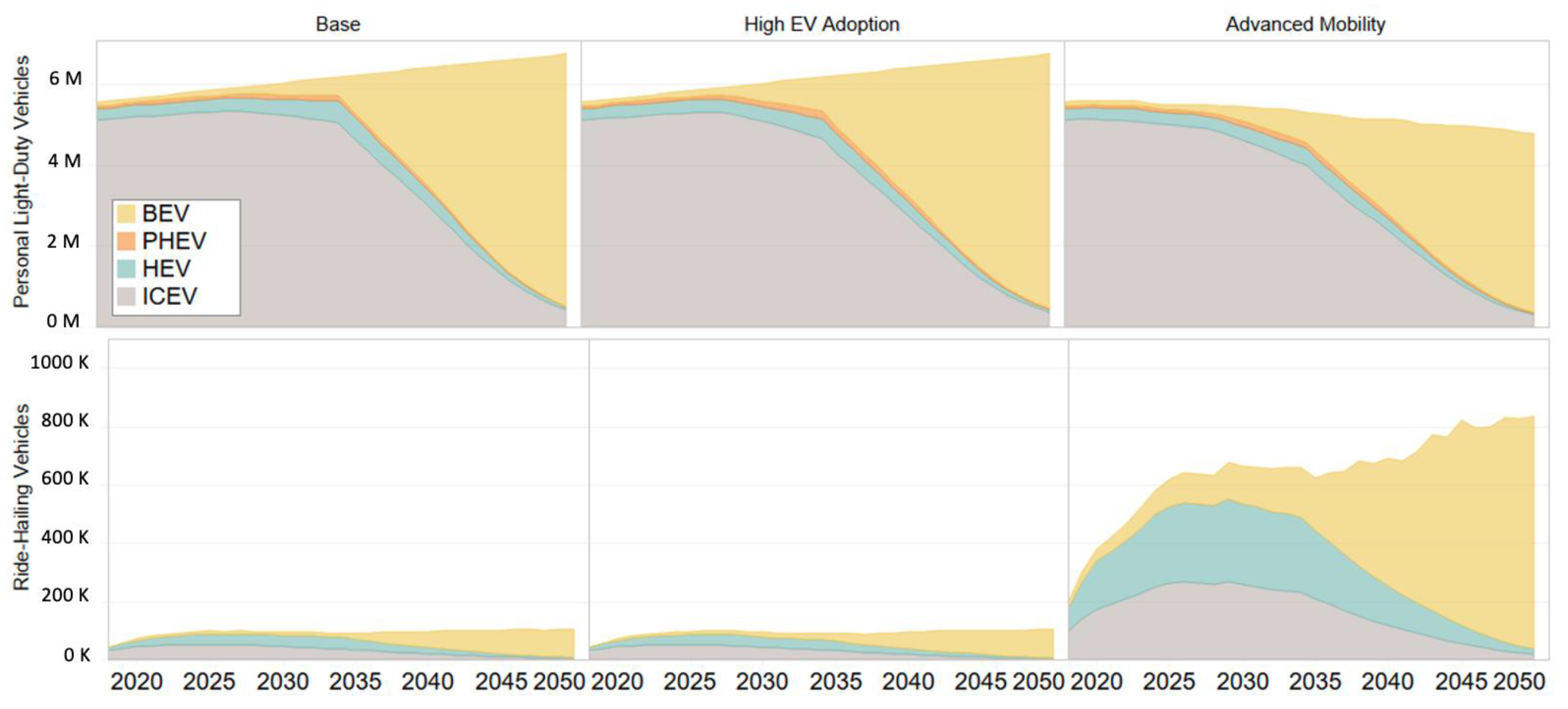
2.5. Transportation Scenarios
- 1.
- Base (2035)
- ○
- Vehicle cost and performance consistent with the U.S. Energy Information Administration’s Annual Energy Outlook 2018;
- ○
- A sales ban on non-zero emission vehicles (non-ZEVs) starting in 2035 (consistent with the phasing out in California of non-ZEVs);
- ○
- Technology deployment levels consistent with the 2035 fleet (less turnover of vehicle stock).
- 2.
- Base—Scenario 1
- ○
- All agents with EVs have access to a home charging;
- ○
- Unlimited home, work, and public charging infrastructure;
- ○
- Destination charging only;
- ○
- No co-simulation of the transportation and grid models.
- 3.
- Base—Scenario 2
- ○
- All agents with EVs have access to home charging;
- ○
- Constrained home, work, and public charging infrastructure;
- ○
- Destination charging only;
- ○
- Co-simulation of the transportation and grid models.
- 4.
- Base—Scenario 3
- ○
- Approximately 87% of agents with EVs have access to home charging;
- ○
- Constrained home, work, and public charging infrastructure;
- ○
- En route and destination charging;
- ○
- Co-simulation of the transportation and grid models.
- 5.
- High EV Adoption (2040)
- ○
- Vehicle cost and performance improvements for PEVs based on the National Renewable Energy Laboratory’s (NREL’s) Annual Technology Baseline’s 2020 Advanced scenarios;
- ○
- Non-ZEV sales ban starting in 2035;
- ○
- Technology deployment levels consistent with the 2040 fleet (i.e., higher turnover of vehicle stock).
- 6.
- Advanced Mobility (2040)
- ○
- Advanced ride-hailing: 50% reductions in cost and time;
- ○
- Option for households to drop personally owned vehicles;
- ○
- Automation assumed for ride-hailing fleets (i.e., reduced cost).
- 7.
- Max EV Adoption (2050)
- ○
- Technology deployment levels consistent with the 2050 fleet—almost full turnover of vehicles after the non-ZEV ban.
2.6. EV Charging Infrastructure
3. Results and Discussion
3.1. Simulation Scenarios
- Base (2035)—Scenario 1: No EV charging;
- Base (2035)—Scenario 2: Base EV charging;
- Base (2035)—Scenario 3: Base EV charging with increased en route charging.
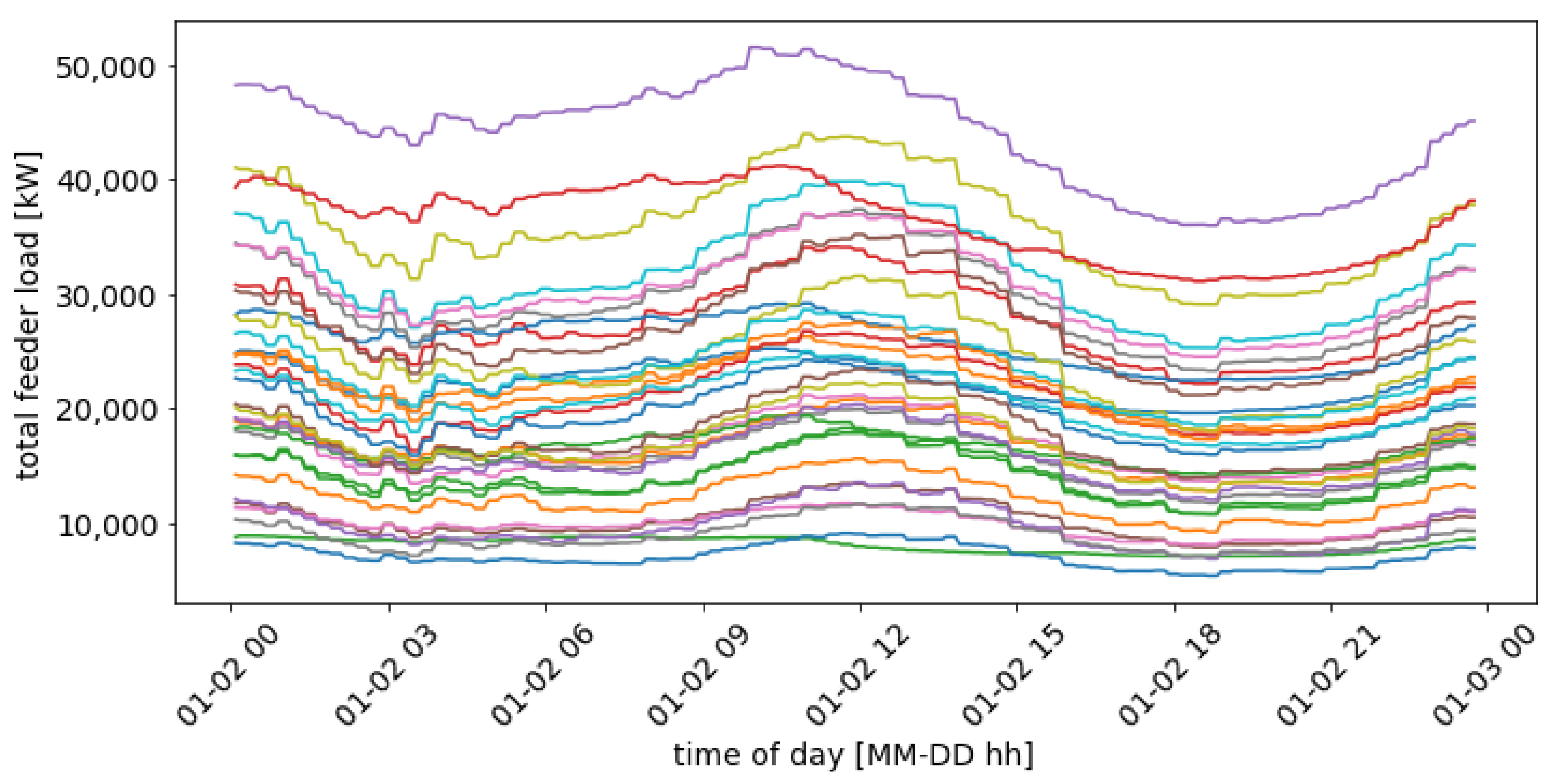
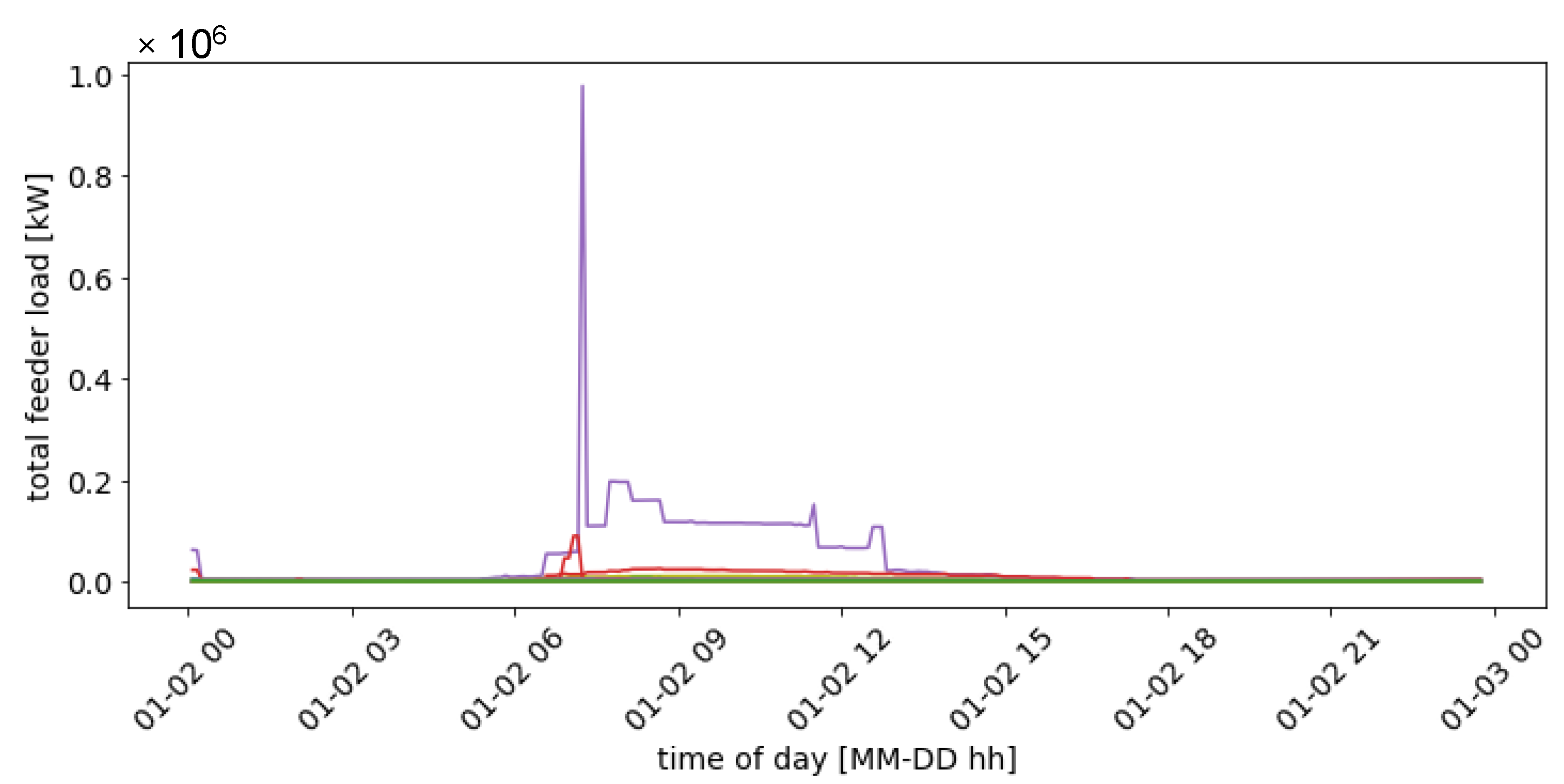
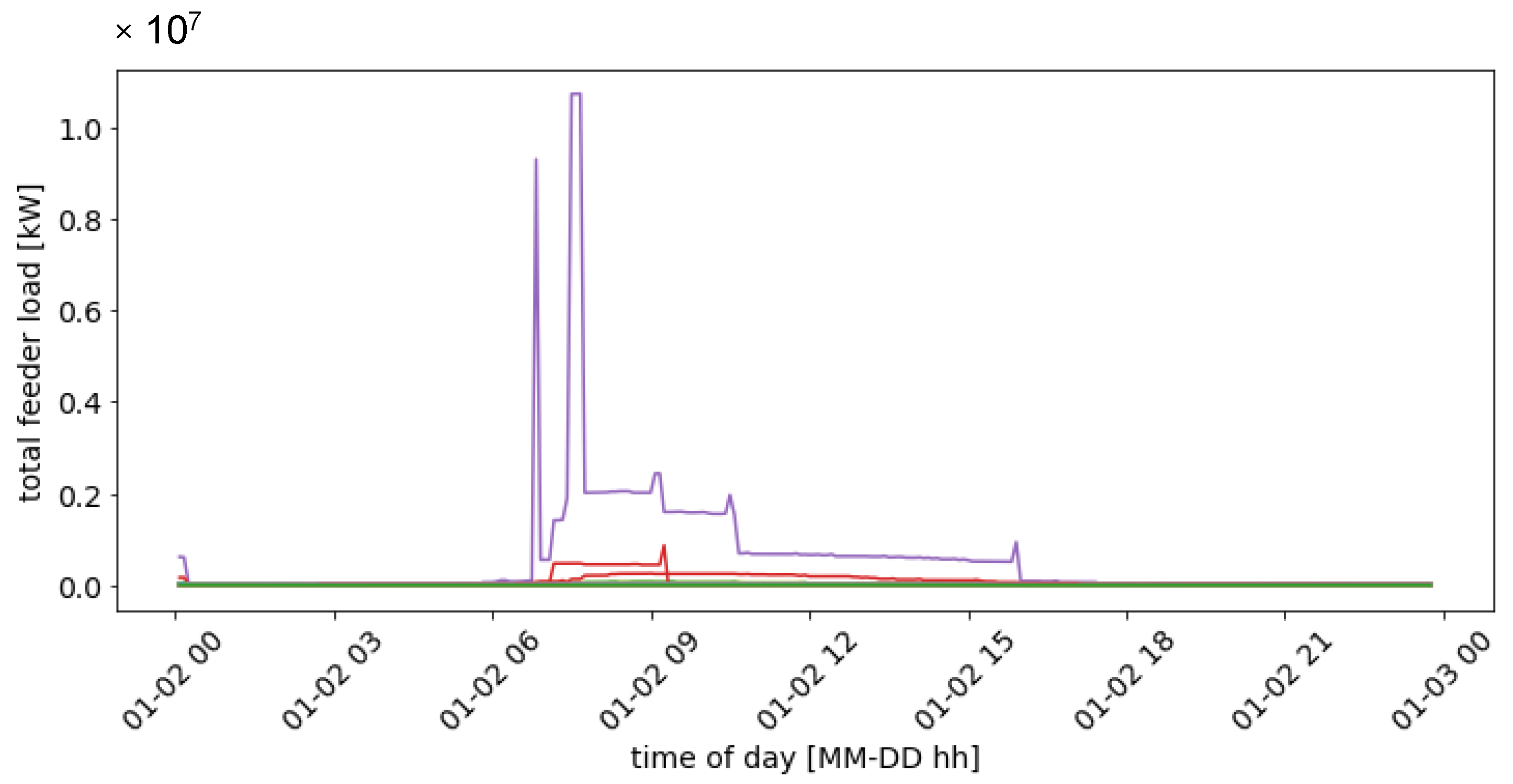
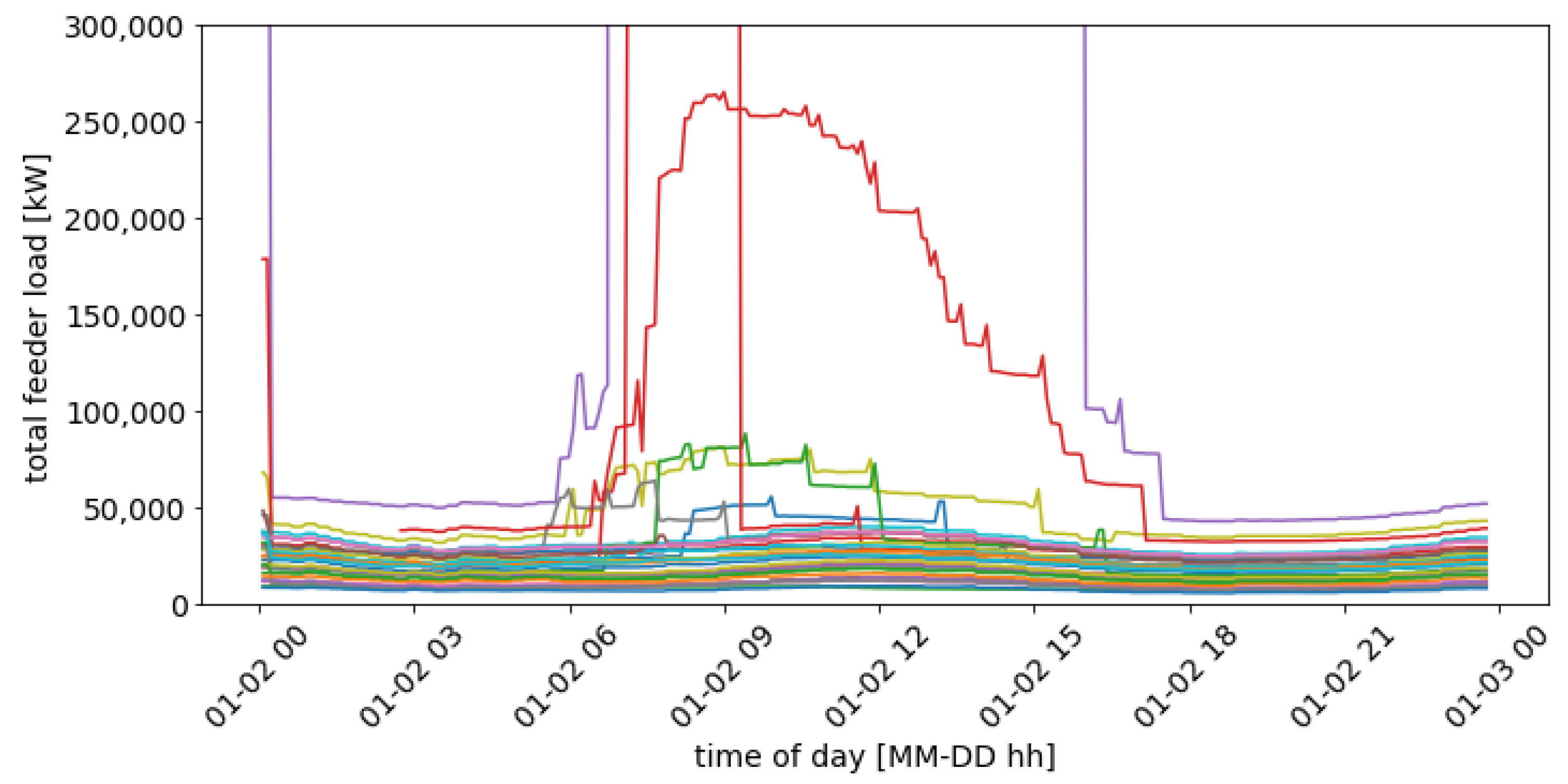
3.2. Charging Loads and Grid Impacts
3.3. Spatial Analysis
3.4. Discussion and Future Work
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Term | Definition |
| EV | Electric Vehicle |
| SMART-DS | Synthetic Models for Advanced, Realistic Testing: Distribution Systems and Scenarios |
| BEAM | Behavior, Energy, Autonomy, and Mobility |
| GEMINI | Grid-Enhanced, Mobility-Integrated NetworkInfrastructures for Extreme Fast Charging |
| PyDSS | Python Distribution System Simulator |
| HELICS | Hierarchical Engine for Large-scale Infrastructure Co-Simulation |
| AWS | Amazon Web Services |
| HPC | High-Performance Computer |
| NREL | National Renewable Energy Laboratory |
| DER | Distributed Energy Resources |
| PV | Photovoltaic |
| XFC | Extreme Fast Charging or Charger |
| SFO | San Francisco |
| BESS | Battery Energy Storage System |
| LBNL | Lawrence Berkeley National Laboratory |
| SOC | State-of-Charge |
| TAZ | Transportation Analysis Zone |
| JSON | JavaScript Object Notation |
| DCFC | Direct Current Fast Charger |
| TEMPO | Transportation Energy and Mobility Pathway Options |
| ZEV | Zero-Emissions Vehicle |
| CA | California |
| ATB | Annual Technology Baseline |
| ANSI | American National Standards Institute |
References
- Muratori, M.; Alexander, M.; Arent, D.; Bazilian, M.; Cazzola, P.; Dede, E.; Farrell, J.; Gearhart, C.; Greene, D.; Jenn, A.; et al. The Rise of Electric Vehicles—2020 Status and Future Expectation. Prog. Energy 2021, 3, 022002. Available online: https://0-iopscience-iop-org.brum.beds.ac.uk/article/10.1088/2516-1083/abe0ad/meta (accessed on 17 February 2023). [CrossRef]
- Panossian, N.; Muratori, M.; Palmintier, B.; Meintz, A.; Lipman, T.; Moffat, K. Challenges and Opportunities of Integrating Electric Vehicles in Electricity Distribution Systems. Curr. Sustain. Energy Rep. 2022, 9, 27–40. [Google Scholar] [CrossRef]
- U.S. DRIVE Grid Integration Technical Team (GITT); Integrated Systems Analysis Technical Team (ISATT). Summary Report on EVs at Scale and the U.S. Electric Power System 2019. Available online: https://www.energy.gov/eere/vehicles/downloads/summary-report-evs-scale-and-us-electric-power-system-2019 (accessed on 24 June 2021).
- Venegas, F.G.; Petit, M.; Perez, Y. Active integration of electric vehicles into distribution grids: Barriers and frameworks for flexibility services. Renew. Sustain. Energy Rev. 2021, 145, 111060. [Google Scholar] [CrossRef]
- Alame, D.; Azzouz, M.; Kar, N. Assessing and mitigating impacts of electric vehicle harmonic currents on distribution systems. Energies 2020, 13, 3257. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Affonso, C.M.; Kezunovic, M. Technical and Economic Impact of PV-BESS Charging Station on Transformer Life: A Case Study. IEEE Trans. Smart Grid 2019, 10, 4683–4692. [Google Scholar] [CrossRef]
- Fachrizal, R.; Ramadhani, U.H.; Munkhammar, J.; Widén, J. Combined PV–EV hosting capacity assessment for a residential LV distribution grid with smart EV charging and PV curtailment. Sustain. Energy Grids Netw. 2021, 26, 100445. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R. Integration of Electric Vehicles in the Electric Power System. Proc. IEEE 2011, 99, 168–183. [Google Scholar] [CrossRef] [Green Version]
- Shukla, A.; Verma, K.; Kumar, R. Multi-objective synergistic planning of EV fast-charging stations in the distribution system coupled with the transportation network. IET Gener. Transm. Distrib. 2019, 13, 3421–3432. [Google Scholar] [CrossRef]
- Lin, H.; Bian, C.; Wang, Y.; Li, H.; Sun, Q.; Wallin, F. Optimal planning of intra-city public charging stations. Energy 2022, 238, 121948. [Google Scholar] [CrossRef]
- Clairand, J.-M.; Gonzalo-Rodriguez, M.; Kumar, R.; Vyas, S.; Escriva-Escriva, G. Optimal siting and sizing of electric taxi charging stations considering transportation and power system requirements. Energy 2022, 256, 124572. [Google Scholar] [CrossRef]
- Kong, W.; Luo, Y.; Feng, G.; Li, K.; Peng, H. Optimal location planning method of fast charging station for electric vehicles considering operators, drivers, vehicles, traffic flow and power grid. Energies 2019, 186, 116826. [Google Scholar] [CrossRef]
- Palensky, P.; Widl, E.; Stifter, M.; Elsheikh, A. Modeling Intelligent Energy Systems: Co-Simulation Platform for Validating Flexible-Demand EV Charging Management. IEEE Trans. Smart Grid 2013, 4, 1939–1947. [Google Scholar] [CrossRef]
- Zhang, H.; Sheppard, C.; Lipman, T.; Moura, S. Joint Fleet Sizing and Charging System Planning for Autonomous Electric Vehicles. IEEE Intell. Transp. Syst. Trans. 2019, 21, 4725–4738. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Mu, Y.; Xu, X.; Jia, H.; Wu, J.; Yu, X.; Qi, Y. A charging pricing strategy of electric vehicle fast charging stations for the voltage control of electricity distribution networks. Appl. Energy 2018, 225, 857–868. [Google Scholar] [CrossRef]
- Leou, R.-C.; Su, C.-L.; Lu, C.-N. Stochastic Analyses of Electric Vehicle Charging Impacts on Distribution Network. IEEE Trans. Power Syst. 2014, 29, 1055–1063. [Google Scholar] [CrossRef]
- Manbachi, M.; Sadu, A.; Farhangi, H.; Monti, A.; Palizban, A.; Ponci, F.; Arzanpour, S. Impact of EV penetration on Volt–VAR Optimization of distribution networks using real-time co-simulation monitoring platform. Appl. Energy 2016, 169, 28–39. [Google Scholar] [CrossRef]
- Neaimeh, M.; Wardle, R.; Jenkins, A.M.; Yi, J.; Hill, G.; Lyons, P.F.; Hübner, Y.; Blythe, P.T.; Taylor, P.C. A probabilistic approach to combining smart meter and electric vehicle charging data to investigate distribution network impacts. Appl. Energy 2015, 157, 688–698. [Google Scholar] [CrossRef] [Green Version]
- Taylor, J.; Maitra, A.; Alexander, M.; Brooks, D.; Duvall, M. Evaluations of plug-in electric vehicle distribution system impacts. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Putrus, G.A.; Suwanapingkarl, P.; Johnston, D.; Bentley, E.C.; Narayana, M. Impact of electric vehicles on power distribution networks. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 827–831. [Google Scholar] [CrossRef]
- Sharma, I.; Canizares, C.; Bhattacharya, K. Smart Charging of PEVs Penetrating Into Residential Distribution Systems. IEEE Trans. Smart Grid 2014, 5, 1196–1209. [Google Scholar] [CrossRef]
- Munkhammar, J.; Widén, J.; Rydén, J. On a probability distribution model combining household power consumption, electric vehicle home-charging and photovoltaic power production. Appl. Energy 2015, 142, 135–143. [Google Scholar] [CrossRef]
- Palmintier, B.; Elgindy, T.; Mateo, C.; Postigo, F.; Gómez, T.; de Cuadra, F.; Martinez, P.D. Experiences developing large-scale synthetic U.S.-style distribution test systems. Electr. Power Syst. Res. 2021, 190, 106665. [Google Scholar] [CrossRef]
- Sheppard, C.; Waraich, R. BEAM—Beam 0.7.0 Documentation. 2019. Available online: https://beam.readthedocs.io/en/latest/index.html (accessed on 29 September 2020).
- Latif, A. NREL/PyDSS. National Renewable Energy Laboratory. 2020. Available online: https://github.com/NREL/PyDSS (accessed on 16 November 2020).
- Palmintier, B.; Krishnamurthy, D.; Top, P.; Smith, S.; Daily, J.; Fuller, J. Design of the HELICS High-Performance Transmission-Distribution-Communication-Market Co-Simulation Framework. In Proceedings of the 2017 Workshop on Modeling and Simulation of Cyber-Physical Energy Systems, Pittsburgh, PA, USA, 21 April 2017. [Google Scholar] [CrossRef]
- Krishnamurthy, D. OpenDSSDirect.py: Python Direct-Mode Interface to OpenDSS. 2020. Available online: https://github.com/dss-extensions/OpenDSSDirect.py (accessed on 16 November 2020).
- OpenDSS. SourceForge. Available online: https://sourceforge.net/projects/electricdss/ (accessed on 16 November 2020).
- Krishnan, V.; Bugbee, B.; Elgindy, T.; Mateo, C.; Duenas, P.; Postigo, F.; Lacroix, J.-S.; Roman, T.G.S.; Palmintier, B. Validation of Synthetic U.S. Electric Power Distribution System Data Sets. IEEE Trans. Smart Grid 2020, 11, 4477–4489. [Google Scholar] [CrossRef]
- SMART-DS SFO 2018 OpenDSS Models. Available online: https://data.openei.org/submissions/2981 (accessed on 17 February 2023).
- Muratori, M.; Jadun, P.; Bush, B.; Bielen, D.; Vimmerstedt, L.; Gonder, J.; Gearhart, C.; Arent, D. Future integrated mobility-energy systems: A modeling perspective. Renew. Sustain. Energy Rev. 2020, 119, 109541. [Google Scholar] [CrossRef]
- Wood, E. Alternative Fuels Data Center: Electric Vehicle Infrastructure Projection Tool (EVI-Pro) Lite. Available online: https://afdc.energy.gov/evi-pro-lite (accessed on 2 November 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Percentage of Loads Selected by Number | Max. kW Distributed Solar Installed (% of Feeder Peak kW) | Percentage of Feeders with One Utility PV Installation | Percentage of Feeders with Two Utility PV Installations | Max. kW Utility Solar Installed (% of Feeder Peak kW) |
|---|---|---|---|---|---|
| Medium Solar | 35% | 75% | 50% | 0% | 33% |
| High Solar | 65% | 150% | 100% | 75% | 80% |
| Scenario | Percentage of Loads Selected | Percentage of Substations with One Utility BESS Installation | Percentage of Substations with Two Utility BESS Installations |
|---|---|---|---|
| Low Batteries | 5% | 50% | 0% |
| High Batteries | 35% | 100% | 75% |
| Scenario | Results Summary |
|---|---|
| Scenario 1: No EV charging | Minimal voltage excursions, no sharp load spikes |
| Scenario 2: Base EV charging | Voltage excursions especially in morning, load spikes during morning and midday |
| Scenario 3: Base EV charging with increased en route charging | Voltage excursions especially in morning and midday, load spikes during morning and midday, especially in urban centers |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panossian, N.V.; Laarabi, H.; Moffat, K.; Chang, H.; Palmintier, B.; Meintz, A.; Lipman, T.E.; Waraich, R.A. Architecture for Co-Simulation of Transportation and Distribution Systems with Electric Vehicle Charging at Scale in the San Francisco Bay Area. Energies 2023, 16, 2189. https://0-doi-org.brum.beds.ac.uk/10.3390/en16052189
Panossian NV, Laarabi H, Moffat K, Chang H, Palmintier B, Meintz A, Lipman TE, Waraich RA. Architecture for Co-Simulation of Transportation and Distribution Systems with Electric Vehicle Charging at Scale in the San Francisco Bay Area. Energies. 2023; 16(5):2189. https://0-doi-org.brum.beds.ac.uk/10.3390/en16052189
Chicago/Turabian StylePanossian, Nadia V., Haitam Laarabi, Keith Moffat, Heather Chang, Bryan Palmintier, Andrew Meintz, Timothy E. Lipman, and Rashid A. Waraich. 2023. "Architecture for Co-Simulation of Transportation and Distribution Systems with Electric Vehicle Charging at Scale in the San Francisco Bay Area" Energies 16, no. 5: 2189. https://0-doi-org.brum.beds.ac.uk/10.3390/en16052189