
High Impedance Fault Models for Overhead Distribution Networks: A Review and Comparison with MV Lab Experiments
 ,
,
Abstract
:1. Introduction
1.1. General Considerations
1.2. Motivation and Contribution
- A systematic review of existing works on HIF models for ODN with a critical analysis on reproducing HIF characteristics. The paper shows the evolution, popularity, limitations, advantages, and disadvantages of HIF models. As a result, researchers and specialists can save time in the selection of the appropriate HIF model for their studies.
- The primary contribution of this work is the comparison of three well-known HIF models for ODN with actual experiments conducted in a high-voltage laboratory at the Federal University of Para. This analysis highlights both the strengths and limitations of these models across various applications.
2. High Impedance Fault Characteristics
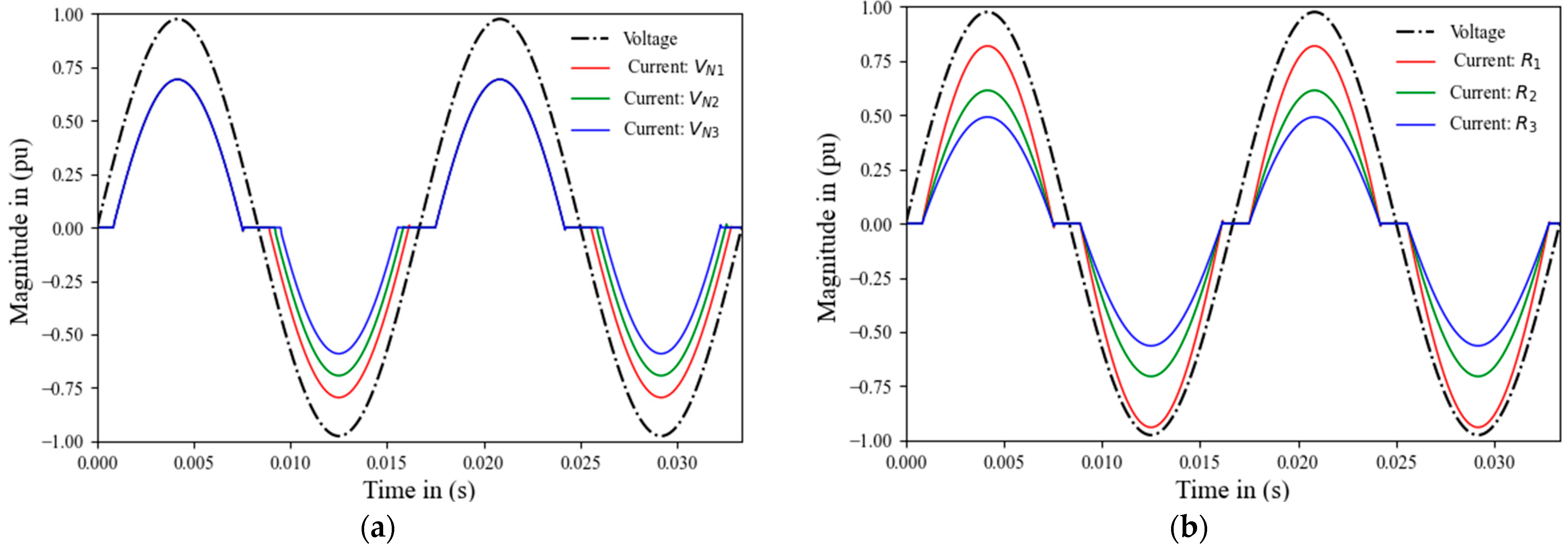
- Asymmetry: Peak values of current are different in the positive and negative half cycle. The asymmetric nature of HIF current is influenced by the porosity and moisture of the surface contact. The presence of silica in the contact surfaces causes asymmetry, according to [9]. The heated silica forms a type of cathode spot that absorbs electrons, causing voltage drops when the cable is subjected to a positive voltage.
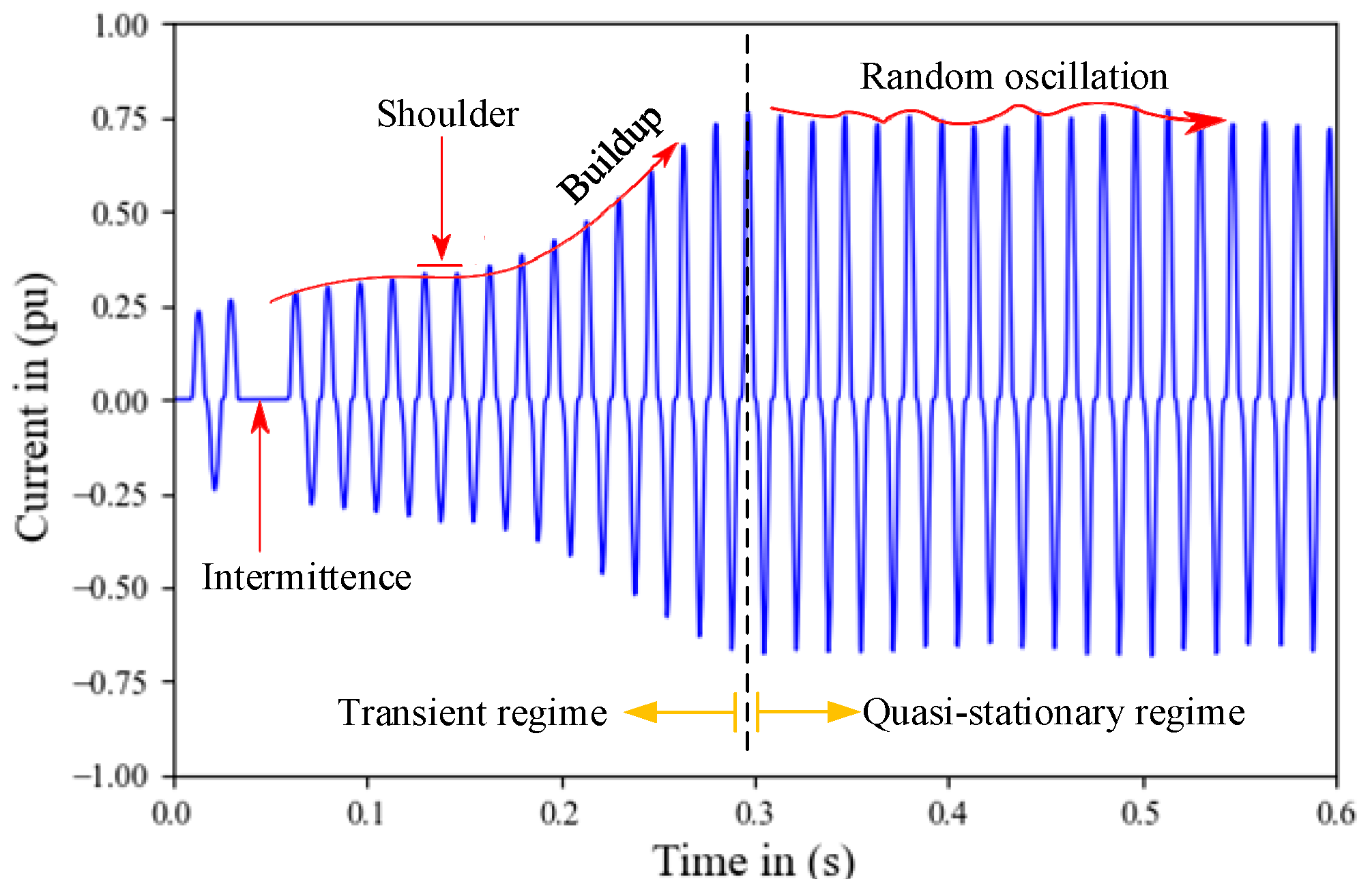
- Build-up: HIF current magnitude gradually increases up to its maximum value. This is due to: (a) the physical accommodation of the cable in the soil, since the cable can move or settle into the soil [12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31]; and (b) the arc penetrates the soil surface and causes soil ionization, increasing the effective area of the equivalent electrode [30].
- Shoulder: HIF current magnitude maintains constant right after the Build-up end.
- Intermittence: HIF electric arc is extinct during a time due to the loss of moisture in the surface and physical accommodation of the cable.
- Randomness: Peak values of current randomly oscillate at each half cycle within a relatively small range due to the random behavior of the electric arc.
3. Categories of HIF Models for ODN
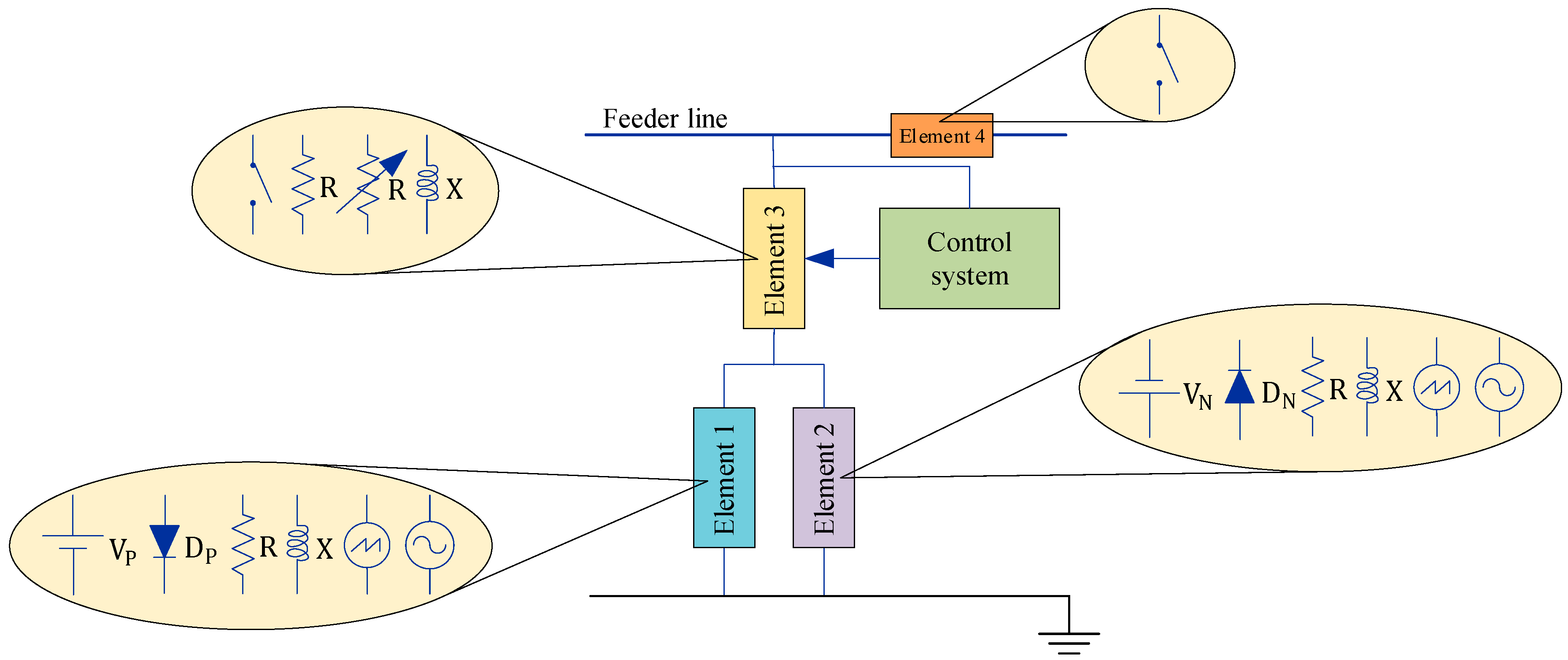
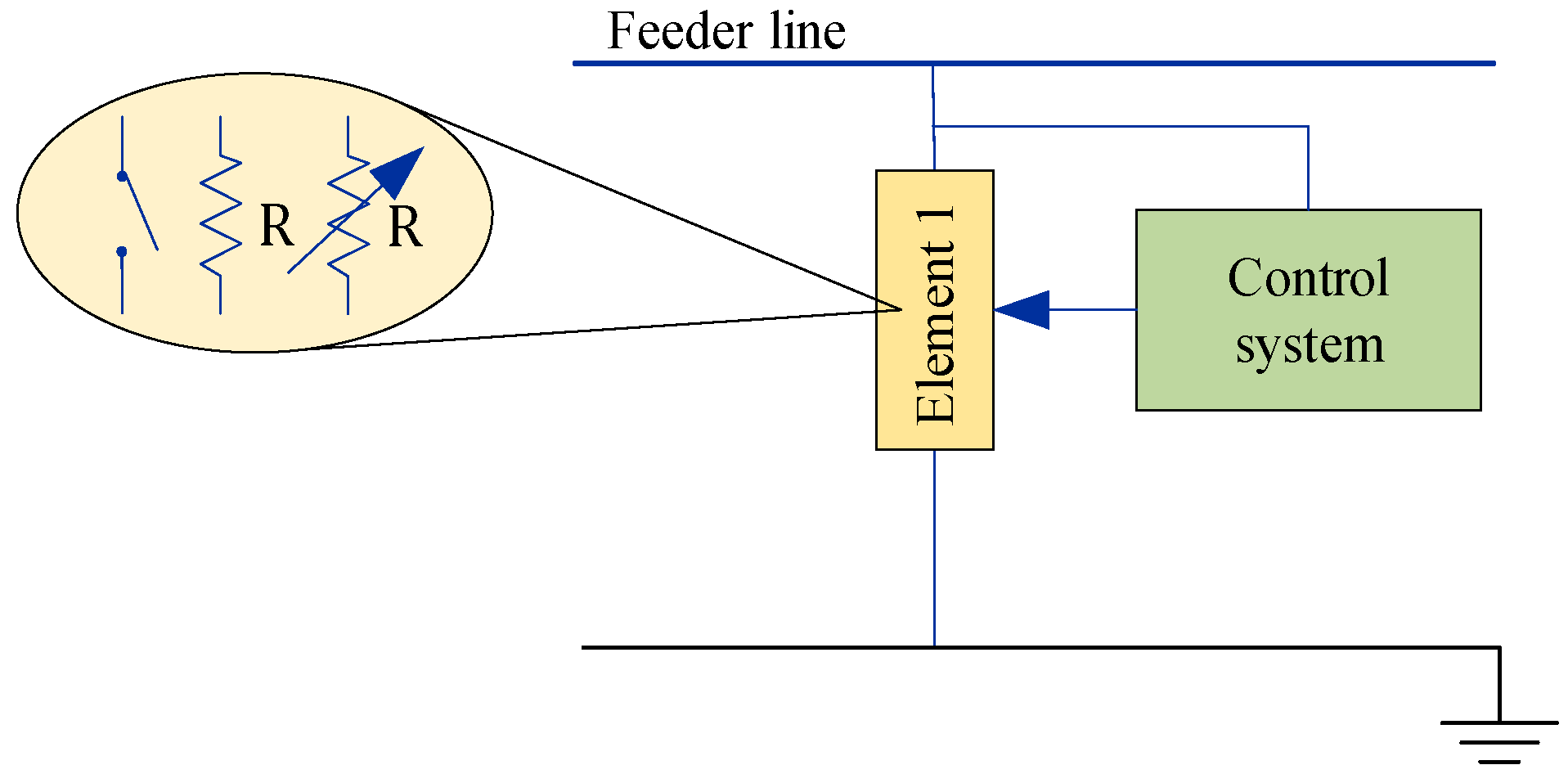
3.1. Models Based on Active and Passive Circuit Elements
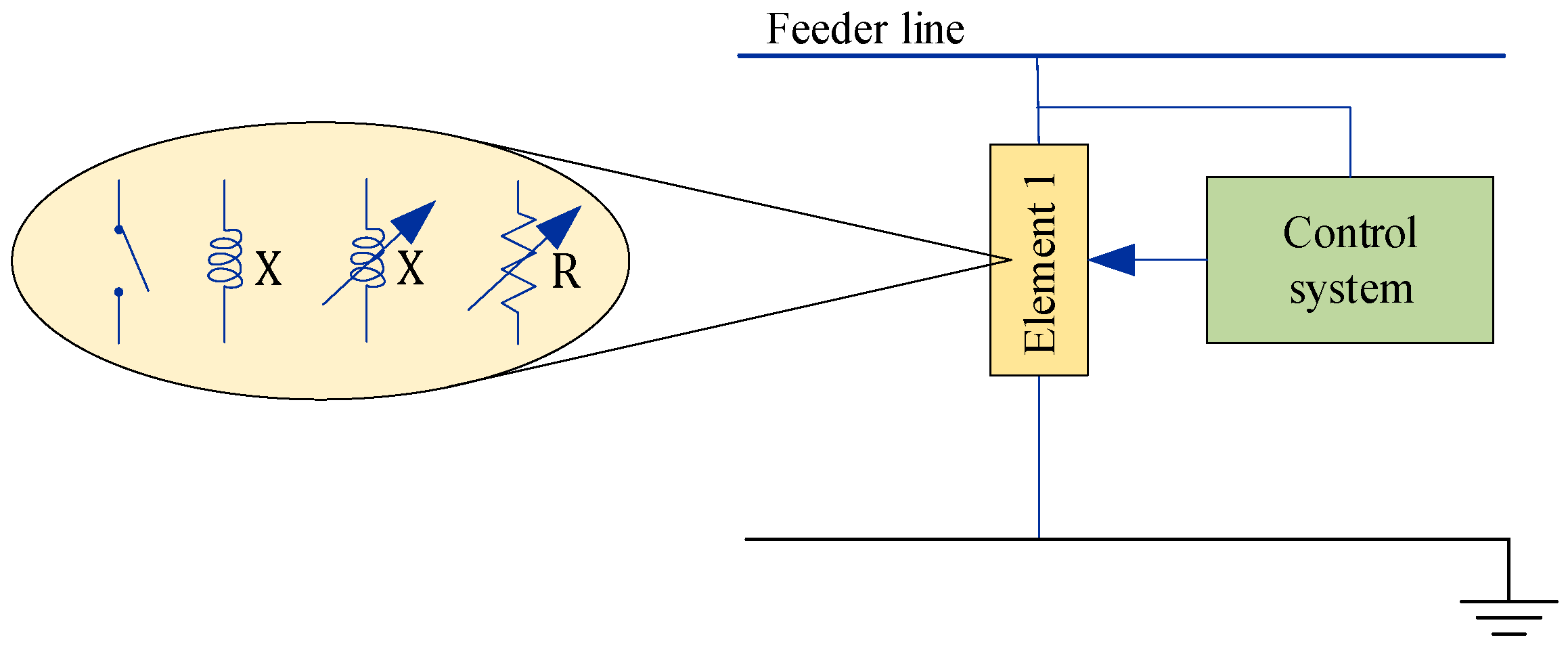
3.2. Models Based on Passive Circuit Elements
3.3. Arc Model
4. High Impedance Fault Models for ODN
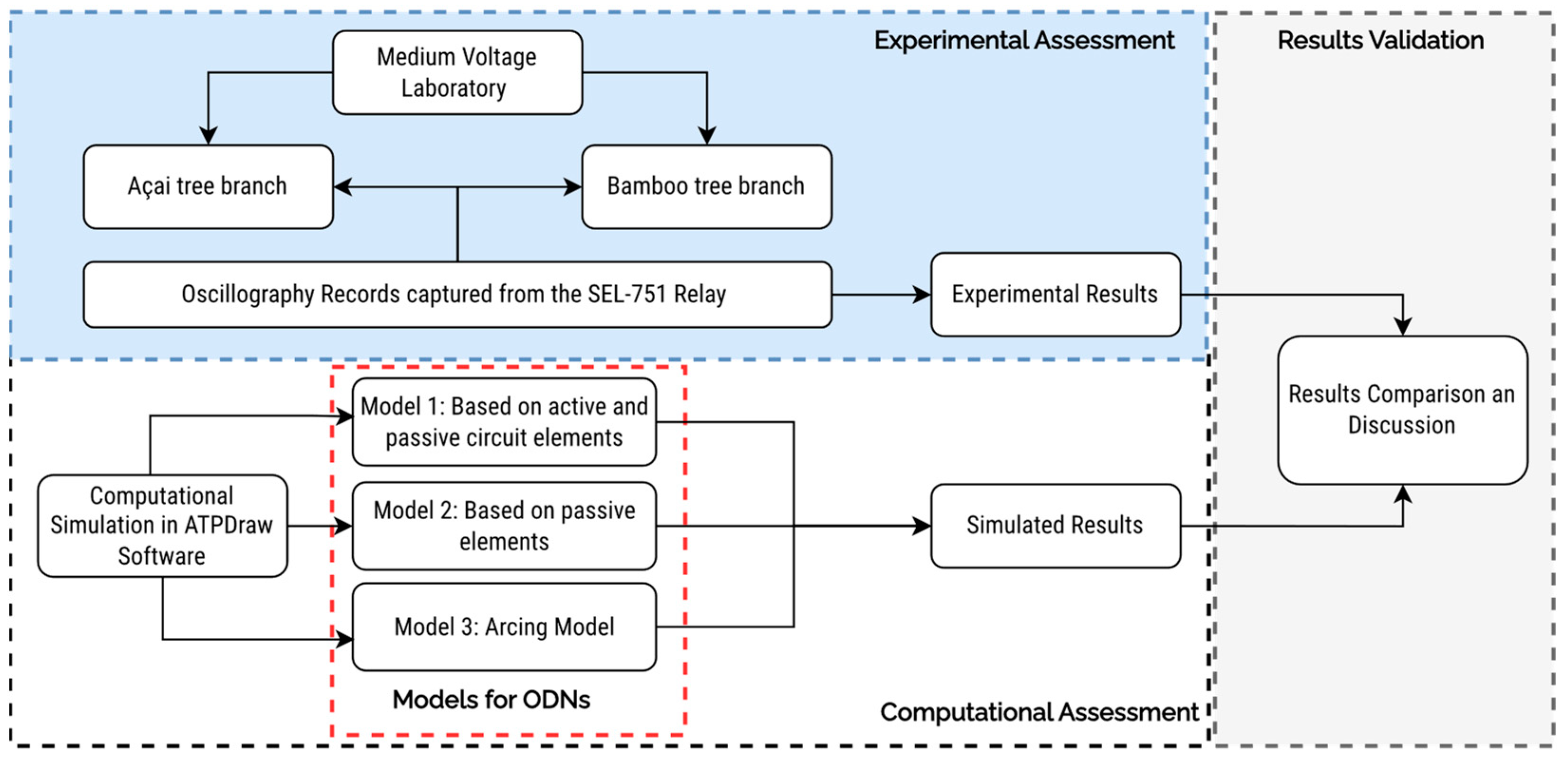
5. Comparison of HIF Models for ODN with MV Lab Test Measured Data
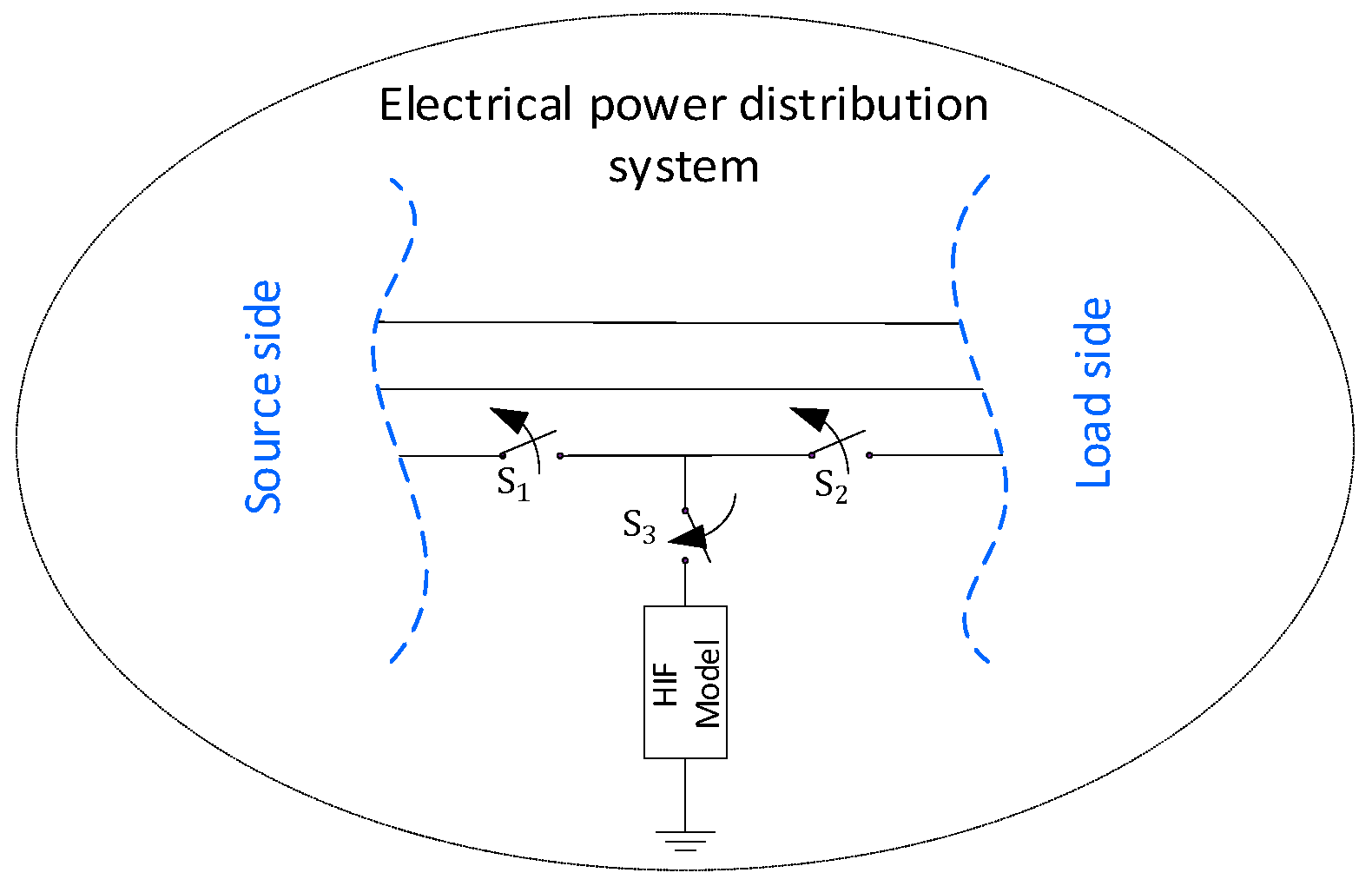
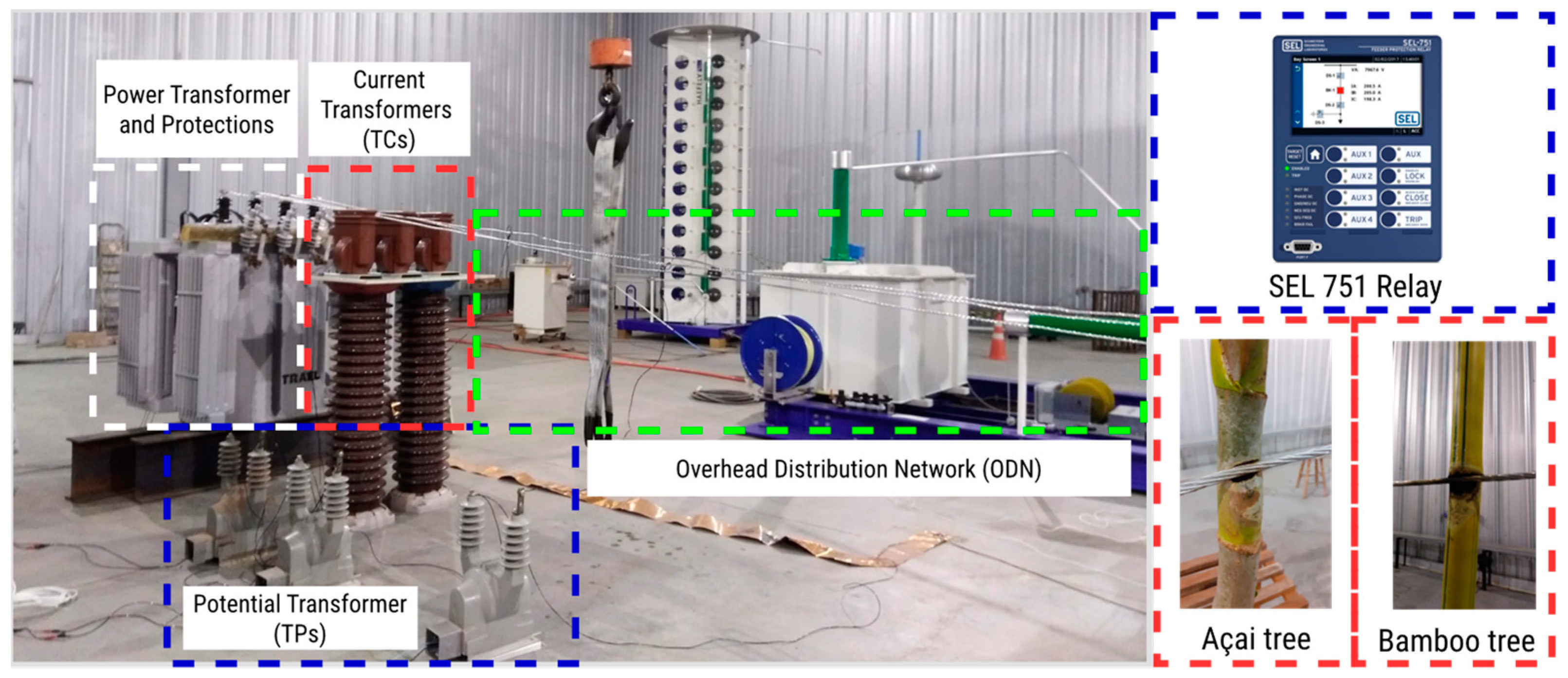
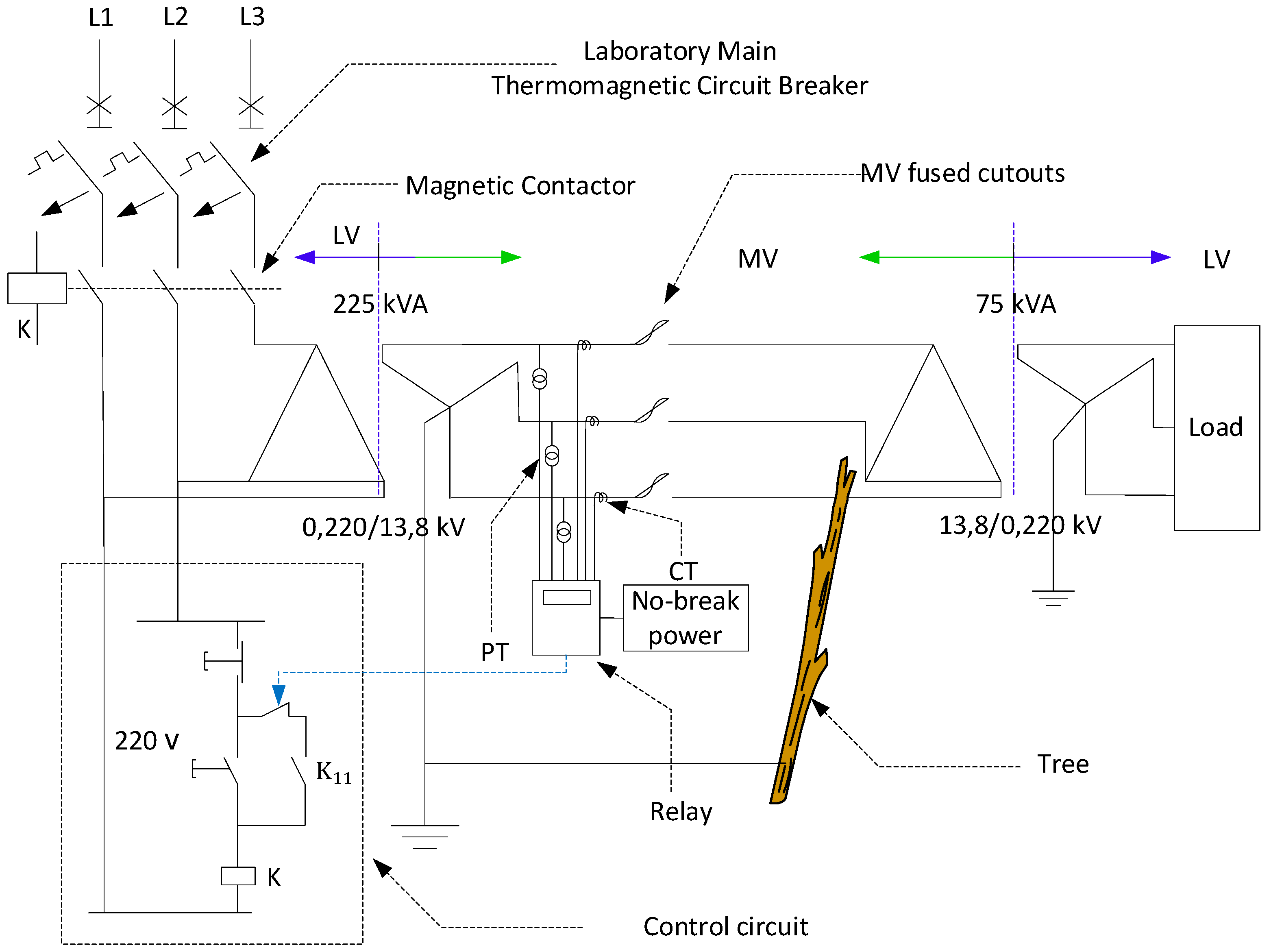
5.1. Materials and Methods
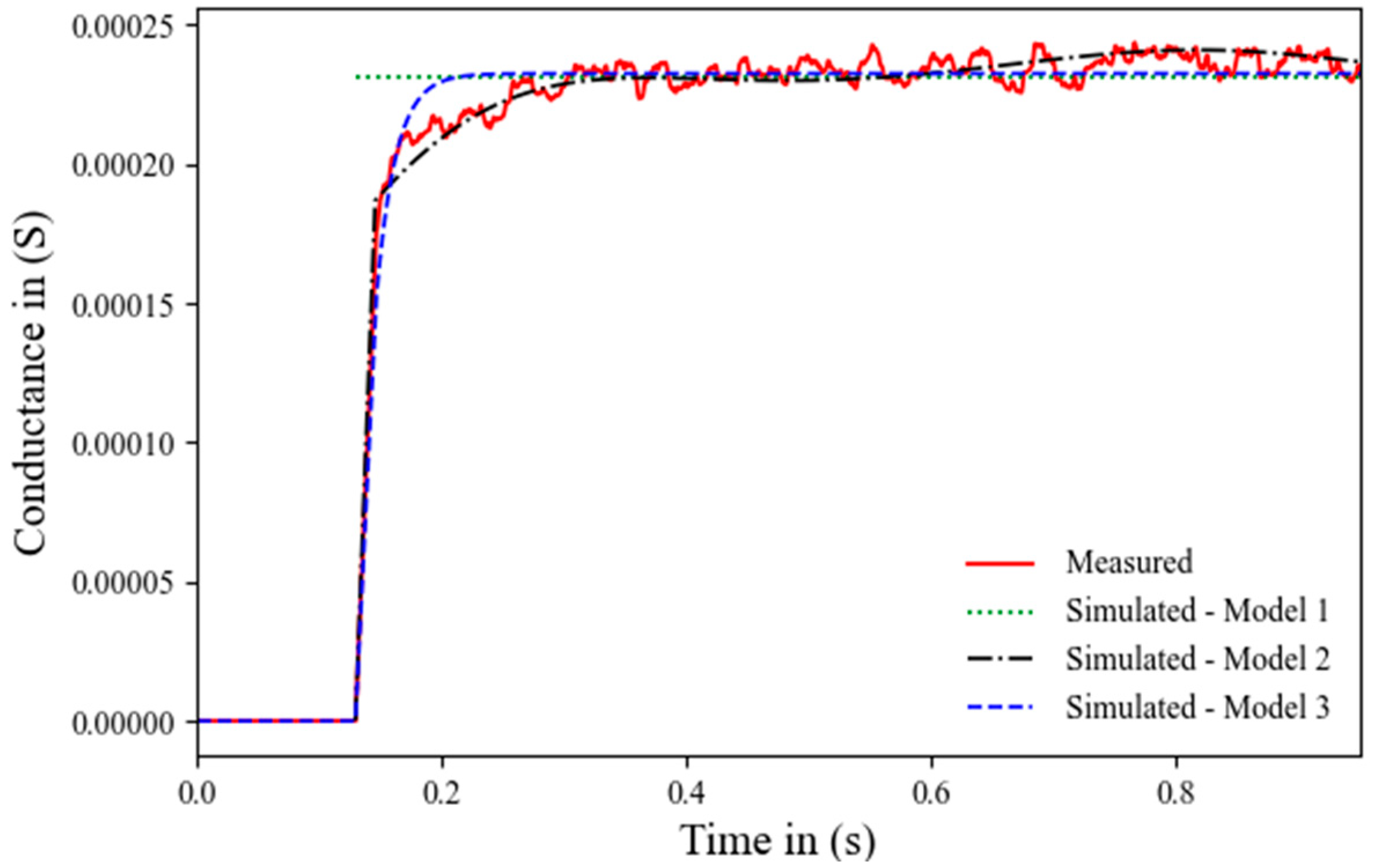
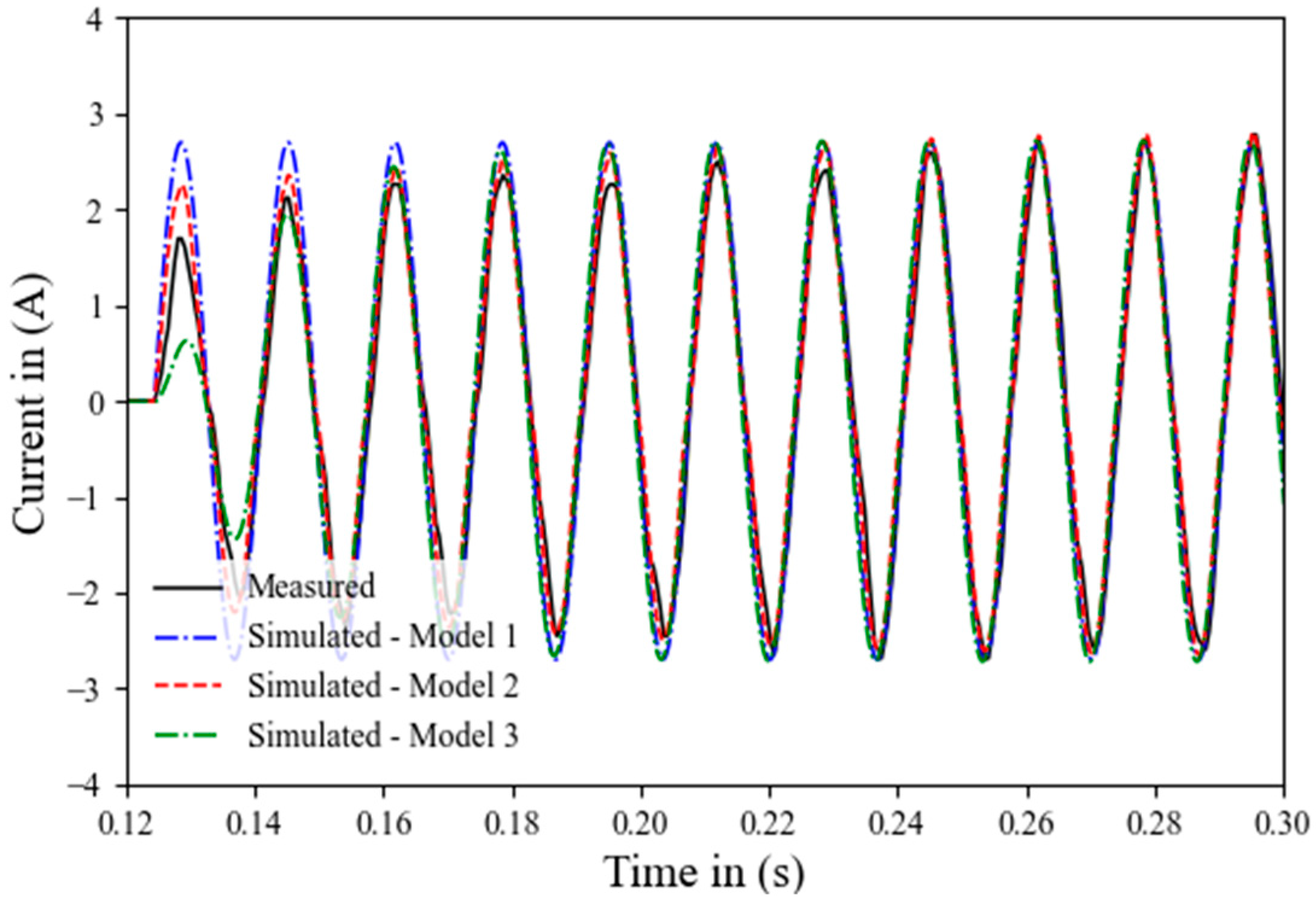
- Model 1—model based on active and passive circuit elements;
- Model 2—model based on passive elements;
- Model 3—arcing model.
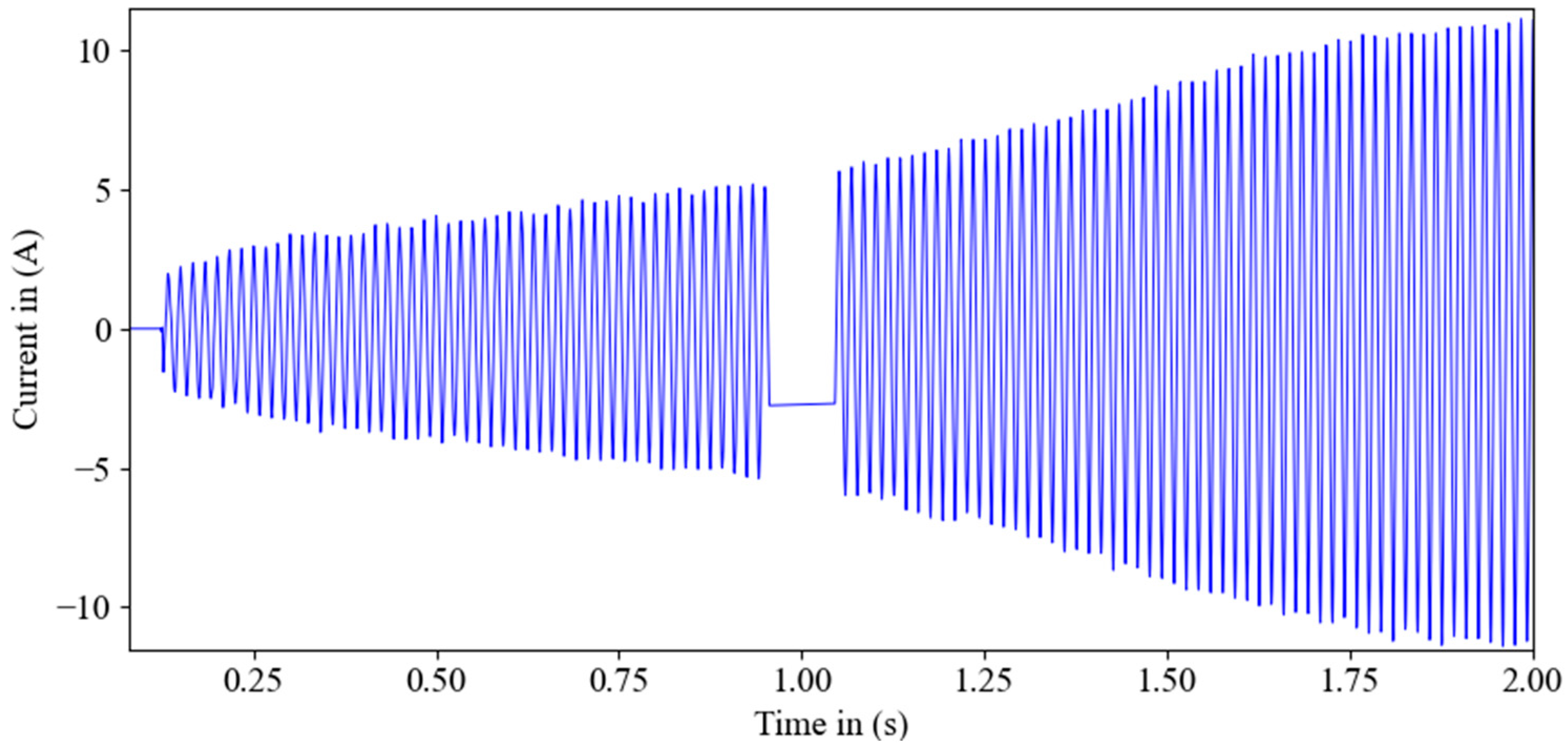
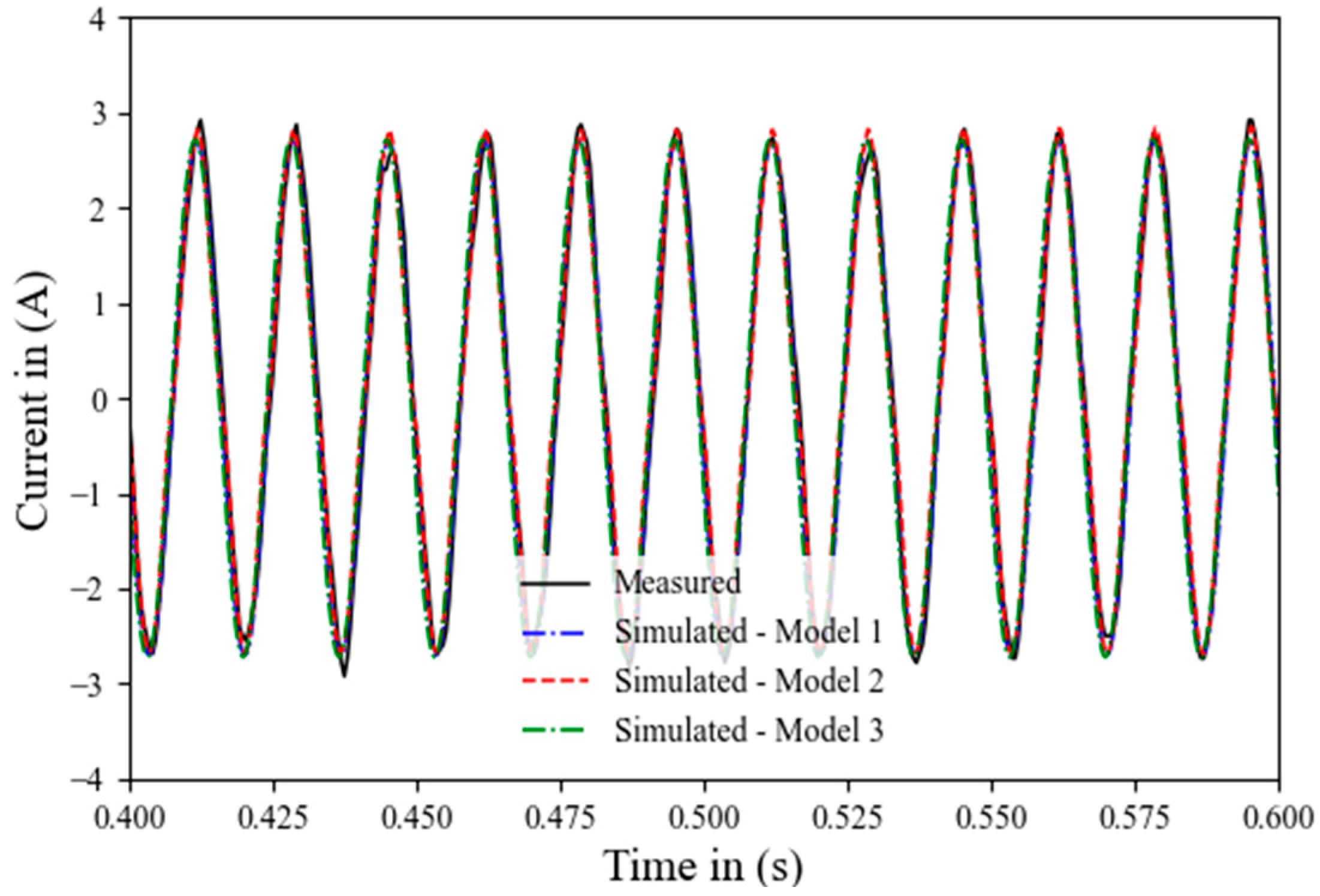
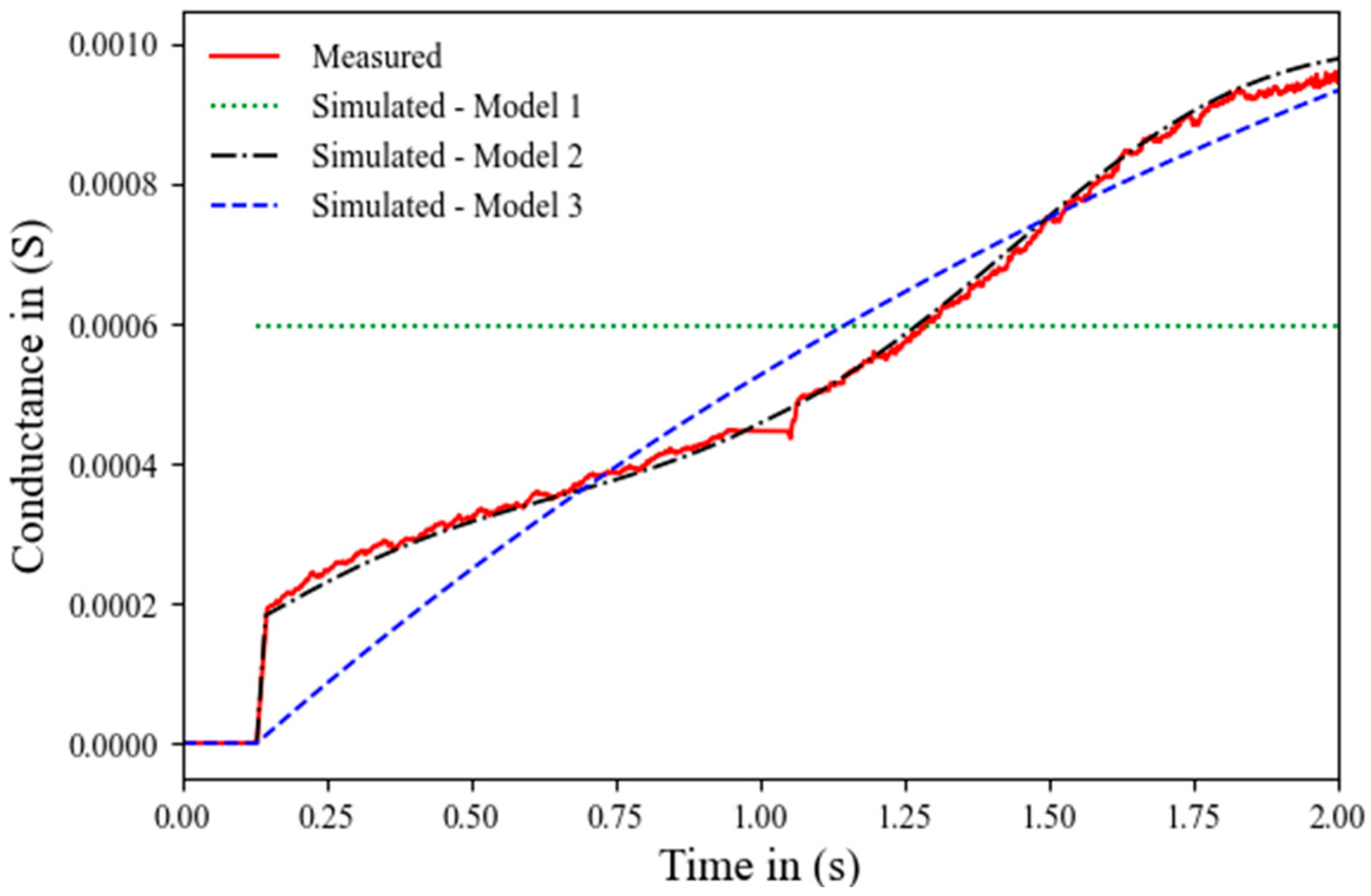
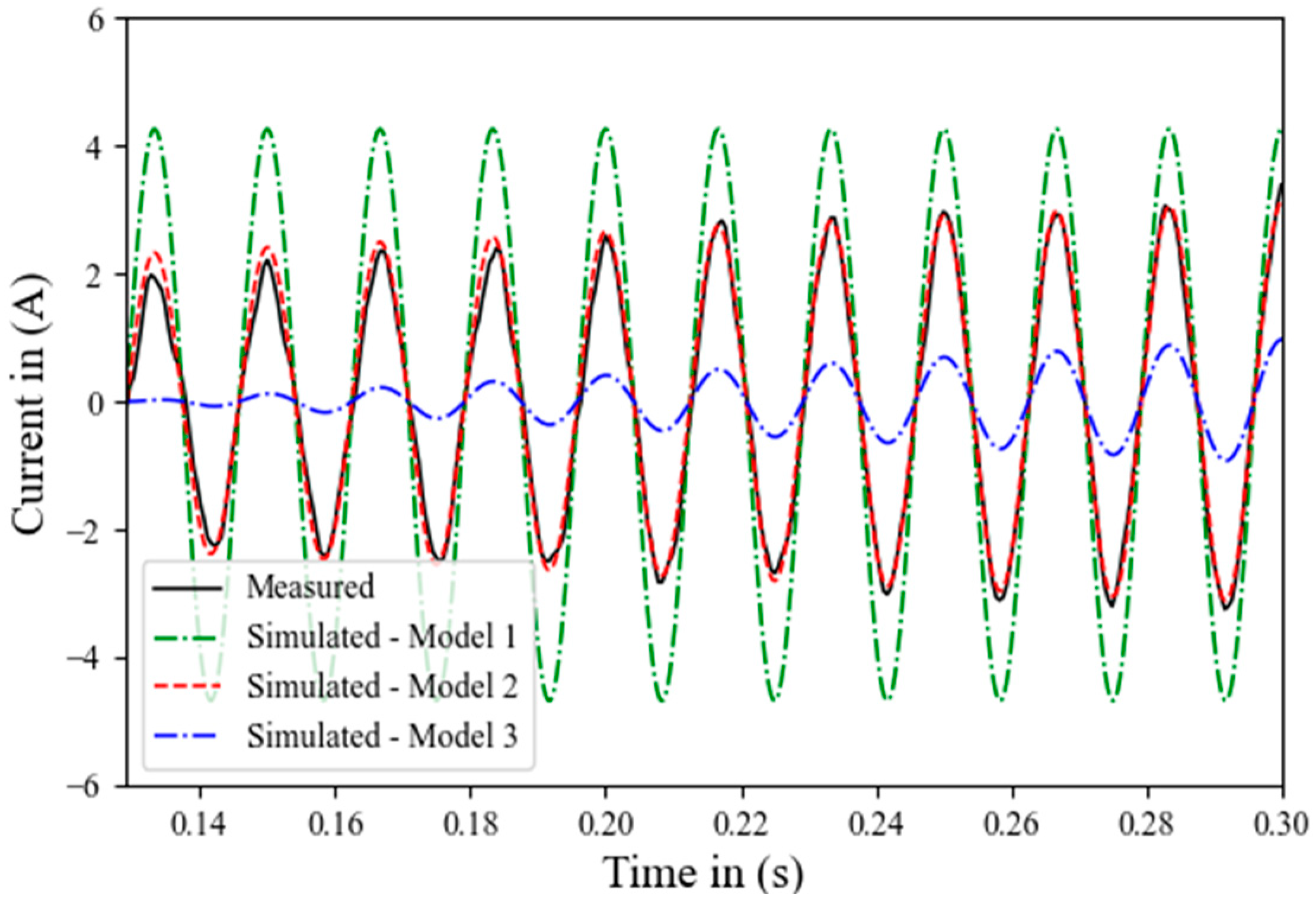
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Adamiak, M.; Wester, C.; Thakur, M.; Jensen, C. High Impedance Fault Detection on Distribution Feeders. 12p. Available online: https://www.aer.gov.au/system/files/Mr%20Marcus%20Steel%20-%20Attachment%20B%20to%20submission%20on%20Ergon%20Energy%20application%20for%20ring%20fencing%20waiver%20-%20December%202015.pdf (accessed on 3 September 2022).
- Ghaderi, A.; Mohammadpour, H.A.; Ginn, H.L.; Shin, Y.-J. High-Impedance Fault Detection in the Distribution Network Using the Time-Frequency-Based Algorithm. IEEE Trans. Power Deliv. 2015, 30, 1260–1268. [Google Scholar] [CrossRef]
- Theron, J.C.J.; Pal, A.; Varghese, A. Tutorial on high impedance fault detection. In Proceedings of the 2018 71st Annual Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 26–29 March 2018; pp. 1–23. [Google Scholar]
- Ojanguren, I.; Steynberg, G.; Channelière, J.-L.; Karsenti, L.; Das, R. High Impedance Faults; CIGRE BROCHURE by WG B5.94; CIGRE Publication: Paris, France, 2009. [Google Scholar]
- Ghaderi, A.; Ginn, H.L.; Mohammadpour, H.A. High impedance fault detection: A review. Electr. Power Syst. Res. 2017, 143, 376–388. [Google Scholar] [CrossRef]
- Balser, S.J.; Clements, K.A.; Kallaur, E. Detection of High Impedance Faults. Available online: http://royalcommission.vic.gov.au/Commission-Reports/Final-Report/Summary.html (accessed on 6 May 2020).
- Russell, B.D. Detection of Arcing Faults on Distribution Feeders. Final Report; Research Foundation, Texas A and M University: College Station, TX, US, 1982. [Google Scholar]
- Hou, D. Detection of high-impedance faults in power distribution systems. In Proceedings of the 2007 Power Systems Conference: Advanced Metering, Protection, Control, Communication, and Distributed Resources, Clemson, SC, USA, 13–16 March 2007; pp. 85–95. [Google Scholar]
- Emanuel, A.E.; Cyganski, D.; Orr, J.A.; Shiller, S.; Gulachenski, E.M. High impedance fault arcing on sandy soil in 15 kV distribution feeders: Contributions to the evaluation of the low frequency spectrum. IEEE Trans. Power Deliv. 1990, 5, 676–686. [Google Scholar] [CrossRef]
- Zamanan, N.; Sykulski, J. The evolution of high impedance fault modeling. In Proceedings of the 2014 16th International Conference on Harmonics and Quality of Power (ICHQP), Bucharest, Romania, 25–28 May 2014; pp. 77–81. [Google Scholar]
- Nam, S.R.; Park, J.K.; Kang, Y.C.; Kim, T.H. A modeling method of a high impedance fault in a distribution system using two series time-varying resistances in EMTP. In Proceedings of the 2001 Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001; Conference Proceedings (Cat. No.01CH37262). Volume 2, pp. 1175–1180. [Google Scholar]
- dos Santos, W.C.; de Souza, B.A.; Brito, N.S.D.; Costa, F.B.; Paes, M.R.C. High Impedance Faults: From Field Tests to Modeling. J. Control Autom. Electr. Syst. 2013, 24, 885–896. [Google Scholar] [CrossRef]
- Cassie, A.M. Theorie Nouvelle des Arcs de Rupture et de la Rigidité des Circuits; Cigre: Paris, France, 1939; pp. 588–608. [Google Scholar]
- Mayr, O. Beiträge zur Theorie des statischen und des dynamischen Lichtbogens. Arch. F. Elektrotechnik 1943, 37, 588–608. [Google Scholar] [CrossRef]
- Torres, V.; Guardado, J.L.; Ruiz, H.F.; Maximov, S. Modeling and detection of high impedance faults. Int. J. Electr. Power Energy Syst. 2014, 61, 163–172. [Google Scholar] [CrossRef]
- Torres-Garcia, V.; Guillen, D.; Olveres, J.; Escalante-Ramirez, B.; Rodriguez-Rodriguez, J.R. Modelling of high impedance faults in distribution systems and validation based on multiresolution techniques. Comput. Electr. Eng. 2020, 83, 106576. [Google Scholar] [CrossRef]
- Lavanya, S.; Prabakaran, S.; Kumar, N.A. Literature Review: High Impedance Fault in Power System and Detection Techniques. Math. Stat. Eng. Appl. 2022, 71, 944–958. [Google Scholar] [CrossRef]
- Li, L.; Redfern, M.A. A review of techniques to detect downed conductors in overhead distribution systems. In Proceedings of the 2001 Seventh International Conference on Developments in Power System Protection (IEE), Amsterdam, The Netherland, 9–12 April 2001; pp. 169–172. [Google Scholar]
- Aljohani, A.; Habiballah, I. High-Impedance Fault Diagnosis: A Review. Energies 2020, 13, 6447. [Google Scholar] [CrossRef]
- Varghese, P.R.; Subathra, M.S.P.; Mathew, C.; George, S.T.; Sairamya, N.J. High Impedance Fault Arc Modeling—A Review. In Intelligent Solutions for Smart Grids and Smart Cities; Siano, P., Williamson, S., Beevi, S., Eds.; Springer Nature: Singapore, 2023; pp. 163–181. [Google Scholar]
- Cordeiro, M.A.M.; Heringer, W.R.; Paye, J.C.H.; Sousa, A.L.; Leão, A.P.; Vieira, J.P.A.; Farias, P.E.; Wontroba, A.; Gallas, M.; Rossini, J.P.; et al. Validation of a High Impedance Fault Model for Overhead Distribution Networks Using Real Oscillography Data. In Proceedings of the 13th Latin-American Congress On Electricity Generation and Transmission, Santiago de, Chile, Chile, 20–23 October 2019; FDCT: Irvine, CA, USA, 2019. [Google Scholar]
- Elkalashy, N.I.; Lehtonen, M.; Darwish, H.A.; Izzularab, M.A.; Taalab, A.I. Modeling and experimental verification of high impedance arcing fault in medium voltage networks. IEEE Trans. Dielectr. Electr. Insul. 2007, 14, 375–383. [Google Scholar] [CrossRef]
- Leão, A.P.; Tostes, M.E.L.; Vieira, J.P.A.; Bezerra, U.H.; Heringer, W.R.; Sousa, A.L.; Cordeiro, M.A.M.; Paye, J.C.H.; Santos, M.C. Characteristics of High Impedance Faults in Overhead Distribution Networks in Bamboo Branches. In Proceedings of the 2020 IEEE PES Transmission & Distribution Conference and Exhibition—Latin America (T&D LA), Montevideo, Uruguay, 28 September–2 October 2020; pp. 1–6. [Google Scholar]
- Wontroba, A.; Morais, A.P.; Cardoso, G.J.; Vieira, J.P.A.; Farias, P.E.; Gallas, M.; Rossini, J.P. High-impedance fault detection on downed conductor in overhead distribution networks. Electr. Power Syst. Res. 2022, 211, 108216. [Google Scholar] [CrossRef]
- Wontroba, A.; de Morais, A.P.; Rossini, J.P.; Gallas, M.; Cardoso, G.; Vieira, J.P.A.; Farias, P.E.; Santos, M.C. Modeling and Real-Time Simulation of High Impedance Faults for Protection Relay Testing and Methods Validation. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Gramado, Brazil, 15–18 September 2019; pp. 1–6. [Google Scholar]
- Farias, P.E.; de Morais, A.P.; Rossini, J.P.; Cardoso, G. Non-linear high impedance fault distance estimation in power distribution systems: A continually online-trained neural network approach. Electr. Power Syst. Res. 2018, 157, 20–28. [Google Scholar] [CrossRef]
- de Sousa, Á.L.; Vieira, J.P.A.; de Melo Cordeiro, M.A.; Leão, A.P.; Paye, J.C.H.; de Morais, A.P.; Junior, G.C.; Santos, M.C. Harmonic Analysis of High-Impedance Fault Experimental Current Waveforms Using Fast Fourier Transform. Simpósio Bras. Sist. Elétricos SBSE 2022, 2, 1958–1965. [Google Scholar] [CrossRef]
- Heringer, W.R.; Cordeiro, M.A.M.; Paye, J.C.H.; Sousa, A.L.; Leão, A.P.; Vieira, J.P.A.; Santos, M.C.; Cardoso, G.; de Morais, A.P.; Wontroba, A.; et al. Reproduction of a High Impedance Double line-to-ground Fault Using Real Oscillography Data. In Proceedings of the 2020 IEEE PES Transmission & Distribution Conference and Exhibition—Latin America (T&D LA), Montevideo, Uruguay, 28 September–2 October 2020; pp. 1–6. [Google Scholar]
- Aucoin, B.M.; Russell, B.D. Distribution High Impedance Fault Detection Utilizing High Frequency Current Components. IEEE Power Eng. Rev. 1982, PER-2, 46–47. [Google Scholar] [CrossRef]
- Jeerings, D.I.; Linders, J.R. Unique aspects of distribution system harmonics due to high impedance ground faults. IEEE Trans. Power Deliv. 1990, 5, 1086–1094. [Google Scholar] [CrossRef]
- Trondoli, L.H.P.D.C. Modelo Estocástico Parametrizável Para o Estudo de Faltas de Alta Impedância em Sistemas de Distribuição de Energia Elétrica. Masters’ Thesis, Universidade de São Paulo, São Carlos, Brazil, 2018. [Google Scholar]
- Lopes, F.V.; Santos, W.C.; Fernandes, D.; Neves, W.L.A.; Brito, N.S.D.; Souza, B.A. A transient based approach to diagnose high impedance faults on smart distribution networks. In Proceedings of the 2013 IEEE PES Conference on Innovative Smart Grid Technologies (ISGT Latin America), Sao Paulo, Brazil, 15–17 April 2013; pp. 1–8. [Google Scholar]
- Santos, W.C.; Costa, F.B.; Silva, J.A.C.B.; Lira, G.R.S.; Souza, B.A.; Brito, N.S.D.; Paes Junior, M.R.C. Automatic building of a simulated high impedance fault database. In Proceedings of the 2010 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America (T D-LA), Sao Paulo, Brazil, 8–10 November 2010; pp. 550–554. [Google Scholar]
- Masa, A.V.; Werben, S.; Maun, J.C. Incorporation of data-mining in protection technology for high impedance fault detection. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Benner, C.L.; Russell, B.D. Practical high-impedance fault detection on distribution feeders. IEEE Trans. Ind. Appl. 1997, 33, 635–640. [Google Scholar] [CrossRef]
- Aucoin, B.M.; Jones, R.H. High impedance fault detection implementation issues. IEEE Trans. Power Deliv. 1996, 11, 139–148. [Google Scholar] [CrossRef]
- Sultan, A.F.; Swift, G.W.; Fedirchuk, D.J. Detecting arcing downed-wires using fault current flicker and half-cycle asymmetry. IEEE Trans. Power Deliv. 1994, 9, 461–470. [Google Scholar] [CrossRef]
- Costa, F.B.; Souza, B.A.; Brito, N.S.D.; Silva, J.A.C.B.; Santos, W.C. Real-Time Detection of Transients Induced by High-Impedance Faults Based on the Boundary Wavelet Transform. IEEE Trans. Ind. Appl. 2015, 51, 5312–5323. [Google Scholar] [CrossRef]
- Ramos, M.; Bretas, A.; Bernardon, D.; Pfitscher, L. Distribution networks HIF location: A frequency domain system model and WLS parameter estimation approach. Electr. Power Syst. Res. 2017, 146, 170–176. [Google Scholar] [CrossRef]
- Macedo, J.R.; Resende, J.W.; Bissochi, C.A.; Carvalho, D.; Castro, F.C. Proposition of an interharmonic-based methodology for high-impedance fault detection in distribution systems. Transm. Distrib. IET Gener. 2015, 9, 2593–2601. [Google Scholar] [CrossRef]
- Russell, B.D.; IEEE Power Engineering Society; Power Engineering Education Committee; Power Systems Relaying Committee; Transmission and Distribution Committee; Substations Committee. IEEE Tutorial Course, Detection of Downed Conductors on Utility Distribution Systems; Publications Sales Department, Institute of Electrical and Electronics Engineers: New York, NY, USA; IEEE Service Center: Piscataway, NJ, USA, 1989. [Google Scholar]
- Mangueira Lima, É.; dos Santos Junqueira, C.M.; Silva Dantas Brito, N.; de Souza, B.A.; de Almeida Coelho, R.; Gayoso Meira Suassuna de Medeiros, H. High impedance fault detection method based on the short-time Fourier transform. Transm. Distrib. IET Gener. 2018, 12, 2577–2584. [Google Scholar] [CrossRef]
- Sedighi, A.-R.; Haghifam, M.-R.; Malik, O.P.; Ghassemian, M.-H. High impedance fault detection based on wavelet transform and statistical pattern recognition. IEEE Trans. Power Deliv. 2005, 20, 2414–2421. [Google Scholar] [CrossRef]
- Sarwar, M.; Mehmood, F.; Abid, M.; Khan, A.Q.; Gul, S.T.; Khan, A.S. High impedance fault detection and isolation in power distribution networks using support vector machines. J. King Saud Univ. Eng. Sci. 2019, 32, 524–535. [Google Scholar] [CrossRef]
- Snider, L.A.; Yuen, Y.S. The artificial neural-networks-based relay algorithm for the detection of stochastic high impedance faults. Neurocomputing 1998, 23, 243–254. [Google Scholar] [CrossRef]
- Dong, X.; Shi, S. Single Phase to Ground Fault Processing. In Fault Location and Service Restoration for Electrical Distribution Systems; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016; pp. 163–203. ISBN 978-1-118-95028-9. [Google Scholar]
- Sharaf, A.M.; Snider, L.A.; Debnath, K. A neural network based relaying scheme for distribution system high impedance fault detection. In Proceedings of the Proceedings 1993 The First New Zealand International Two-Stream Conference on Artificial Neural Networks and Expert Systems, Dunedin, New Zealand, 24–26 November 1993; pp. 321–324. [Google Scholar]
- Wai, D.C.T.; Yibin, X. A novel technique for high impedance fault identification. IEEE Trans. Power Deliv. 1998, 13, 738–744. [Google Scholar] [CrossRef]
- Sheng, Y.; Rovnyak, S.M. Decision tree-based methodology for high impedance fault detection. IEEE Trans. Power Deliv. 2004, 19, 533–536. [Google Scholar] [CrossRef]
- Michalik, M.; Rebizant, W.; Lukowicz, M.; Lee, S.-J.; Kang, S.-H. Wavelet transform approach to high impedance fault detection in MV networks. In Proceedings of the 2005 IEEE Russia Power Tech, St. Petersburg, Russia, 27–30 June 2005; pp. 1–7. [Google Scholar]
- Zamanan, N.; Sykulski, J.K. Modelling arcing high impedances faults in relation to the physical processes in the electric arc. WSEAS Trans. Power Syst. 2006, 1, 1507–1512. [Google Scholar]
- Sedighi, A.R.; Haghifam, M.R. Simulation of high impedance ground fault in electrical power distribution systems. In Proceedings of the 2010 International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010; pp. 1–7. [Google Scholar]
- Baqui, I.; Zamora, I.; Mazón, J.; Buigues, G. High impedance fault detection methodology using wavelet transform and artificial neural networks. Electr. Power Syst. Res. 2011, 81, 1325–1333. [Google Scholar] [CrossRef]
- Moravej, Z.; Mortazavi, S.H.; Shahrtash, S.M. DT-CWT based event feature extraction for high impedance faults detection in distribution system. Int. Trans. Electr. Energy Syst. 2015, 25, 3288–3303. [Google Scholar] [CrossRef]
- Ferraz, R.G.; Iurinic, L.U.; Filomena, A.D.; Gazzana, D.S.; Bretas, A.S. Arc fault location: A nonlinear time varying fault model and frequency domain parameter estimation approach. Int. J. Electr. Power Energy Syst. 2016, 80, 347–355. [Google Scholar] [CrossRef]
- Sharat, A.M.; Snider, L.A.; Debnath, K. A neural network based back error propagation relay algorithm for distribution system high impedance fault detection. In Proceedings of the 1993 2nd International Conference on Advances in Power System Control, Operation and Management, APSCOM-93, Hong Kong, China, 7–10 December 1993; Volume 2, pp. 613–620. [Google Scholar]
- Lai, T.M.; Snider, L.A.; Lo, E.; Sutanto, D. High-impedance fault detection using discrete wavelet transform and frequency range and RMS conversion. IEEE Trans. Power Deliv. 2005, 20, 397–407. [Google Scholar] [CrossRef]
- Shannon, R.E. Introduction to the art and science of simulation. In Proceedings of the 1998 Winter Simulation Conference, Washington, DC, USA, 13–16 December 1998; Proceedings (Cat. No.98CH36274). Volume 1, pp. 7–14. [Google Scholar]
- Samantaray, S.R.; Panigrahi, B.K.; Dash, P.K. High impedance fault detection in power distribution networks using time-frequency transform and probabilistic neural network. Transm. Distrib. IET Gener. 2008, 2, 261–270. [Google Scholar] [CrossRef]
- Soheili, A.; Sadeh, J.; Bakhshi, R. Modified FFT based high impedance fault detection technique considering distribution non-linear loads: Simulation and experimental data analysis. Int. J. Electr. Power Energy Syst. 2018, 94, 124–140. [Google Scholar] [CrossRef]
- Gautam, S.; Brahma, S.M. Detection of High Impedance Fault in Power Distribution Systems Using Mathematical Morphology. IEEE Trans. Power Syst. 2013, 28, 1226–1234. [Google Scholar] [CrossRef]
- Ghaderi, A.; Mohammadpour, H.A.; Ginn, H. High impedance fault detection method efficiency: Simulation vs. real-world data acquisition. In Proceedings of the 2015 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 20–21 February 2015; pp. 1–5. [Google Scholar]
- Ghaderi, A.; Mohammadpour, H.A.; Ginn, H. Active fault location in distribution network using time-frequency reflectometry. In Proceedings of the 2015 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 20–21 February 2015; pp. 1–7. [Google Scholar]
- Nayak, P.K.; Sarwagya, K.; Biswal, T. A novel high impedance fault detection technique in distribution systems with distributed generators. In Proceedings of the 2016 National Power Systems Conference (NPSC), Bhubaneswar, India, 19–21 December 2016; pp. 1–6. [Google Scholar]
- Soheili, A.; Sadeh, J.; Lomei, H.; Muttaqi, K. A new high impedance fault detection scheme: Fourier based approach. In Proceedings of the 2016 IEEE International Conference on Power System Technology (POWERCON), Wollongong, NSW, Australia, 28 September-1 October 2016; pp. 1–6. [Google Scholar]
- Kavi, M.; Mishra, Y.; Vilathgamuwa, D.M. Detection and identification of high impedance faults in single wire earth return distribution networks. In Proceedings of the 2016 Australasian Universities Power Engineering Conference (AUPEC), Brisbane, Australia, 25–28 September 2016; pp. 1–6. [Google Scholar]
- Kavi, M.; Mishra, Y.; Vilathgamuwa, M.D. High-impedance fault detection and classification in power system distribution networks using morphological fault detector algorithm. Transm. Distrib. IET Gener. 2018, 12, 3699–3710. [Google Scholar] [CrossRef]
- Soheili, A.; Sadeh, J. Evidential reasoning based approach to high impedance fault detection in power distribution systems. Transm. Distrib. IET Gener. 2017, 11, 1325–1336. [Google Scholar] [CrossRef]
- Sedighi, A.-R. A New Model for High Impedance Fault in Electrical Distribution Systems. Available online: http://www.isroset.org/ (accessed on 9 June 2020).
- Hong, Y.-Y.; Huang, W.-S.; Chang, Y.-R.; Lee, Y.-D.; Ouyang, D.-C. Locating high-impedance fault in a smart distribution system using wavelet entropy and hybrid self-organizing mapping network. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar]
- Kizilcay, M.; Pniok, T. Digital simulation of fault arcs in power systems. Eur. Trans. Electr. Power 1991, 1, 55–60. [Google Scholar] [CrossRef]
- Nunes, J.U.N.; Bretas, A.S.; Bretas, N.G.; Herrera-Orozco, A.R.; Iurinic, L.U. Distribution systems high impedance fault location: A spectral domain model considering parametric error processing. Int. J. Electr. Power Energy Syst. 2019, 109, 227–241. [Google Scholar] [CrossRef]
- Carr, J. Detection of High Impedance Faults on Multi-Grounded Primary Distribution Systems. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 2008–2016. [Google Scholar] [CrossRef]
- Sharaf, A.M.; El-Sharkawy, R.M.; Al-Fatih, R.; Al-Ketbi, M. High impedance fault detection on radial distribution and utilization systems. In Proceedings of the 1996 Canadian Conference on Electrical and Computer Engineering, Calgary, AB, Canada, 26–29 May 1996; Volume 2, pp. 1012–1015. [Google Scholar]
- Sharaf, A.M.; Abu-Azab, S.I. A smart relaying scheme for high impedance faults in distribution and utilization networks. In Proceedings of the 2000 Canadian Conference on Electrical and Computer Engineering, Quebec City, QC, Canada, 13–16 May 2000; Conference Proceedings. Navigating to a New Era (Cat. No.00TH8492). Volume 2, pp. 740–744. [Google Scholar]
- Lee, R.E.; Bishop, M.T. A Comparison of Measured High Impedance Fault Data to Digital Computer Modeling Results. IEEE Trans. Power Appar. Syst. 1985, PAS-104, 2754–2758. [Google Scholar] [CrossRef]
- Dasco, A.; Marguet, R.; Raison, B. Fault distance estimation in distribution network for high impedance faults. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June-2 July 2015; pp. 1–6. [Google Scholar]
- Yu, D.C.; Khan, S.H. An adaptive high and low impedance fault detection method. IEEE Trans. Power Deliv. 1994, 9, 1812–1821. [Google Scholar] [CrossRef]
- dos Santos, W.C. Identificação de Faltas de Alta Impedância em Sistemas de Distribuição. Ph.D. Thesis, Universidade Federal De Campina Grande, Campina Grande, Brazil. Available online: http://dspace.sti.ufcg.edu.br:8080/xmlui/handle/riufcg/602 (accessed on 14 January 2023).
- Wang, B.; Geng, J.; Dong, X. High-Impedance Fault Detection Based on Nonlinear Voltage–Current Characteristic Profile Identification. IEEE Trans. Smart Grid 2018, 9, 3783–3791. [Google Scholar] [CrossRef]
- Darwish, H.A.; Elkalashy, N.I. Universal arc representation using EMTP. IEEE Trans. Power Deliv. 2005, 20, 772–779. [Google Scholar] [CrossRef]
- Michalik, M.; Rebizant, W.; Lukowicz, M.; Lee, S.-J.; Kang, S.-H. High-impedance fault detection in distribution networks with use of wavelet-based algorithm. IEEE Trans. Power Deliv. 2006, 21, 1793–1802. [Google Scholar] [CrossRef]
- Cui, T.; Dong, X.; Bo, Z.; Richards, S. Integrated scheme for high impedance fault detection in MV distribution system. In Proceedings of the 2008 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America, Bogota, Columbia, 13–15 August 2008; pp. 1–6. [Google Scholar]
- Cui, T.; Dong, X.; Bo, Z.; Klimek, A.; Edwards, A. Modeling study for high impedance fault detection in MV distribution system. In Proceedings of the 2008 43rd International Universities Power Engineering Conference, Padova, Italy, 1–4 September 2008; pp. 1–5. [Google Scholar]
- Torres, V.; Maximov, S.; Ruiz, H.F.; Guardado, J.L. Distributed Parameters Model for High-impedance Fault Detection and Localization in Transmission Lines. Electr. Power Compon. Syst. 2013, 41, 1311–1333. [Google Scholar] [CrossRef]
- Torres, V.; Ruiz, H.F.; Maximov, S.; Ramírez, S. Modeling of high impedance faults in electric distribution systems. In Proceedings of the 2014 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 5–7 November 2014; pp. 1–6. [Google Scholar]
- Thomas, M.S.; Bhaskar, N.; Prakash, A. Voltage Based Detection Method for High Impedance Fault in a Distribution System. J. Inst. Eng. India Ser. B 2016, 97, 413–423. [Google Scholar] [CrossRef]
- Iurinic, L.U.; Herrera-Orozco, A.R.; Ferraz, R.G.; Bretas, A.S. Distribution Systems High-Impedance Fault Location: A Parameter Estimation Approach. IEEE Trans. Power Deliv. 2016, 31, 1806–1814. [Google Scholar] [CrossRef]




















| Model | Year | Ref. | Element 1 | Element 2 | Element 3 | Element 4 | Control System | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a | 1990 | [9] |  |  | - | - |  |  | - | - |  |  | - | - | - | ||
| b | 1993 | [47] | | | | - | | | | - |  | - | - | - | - | ||
| c | 1998 | [48] | |  | - | - | | | - | - | | |  | | TACS | ||
| d | 2004 | [49] | | | - | - | | | - | - | | | - | - | - | ||
| e | 2005 | [50] | | |  | - | | | | - | | | - | - | MODELS | ||
| f | 2006 | [51] | | | | | | | | | - | - | - | - | - | ||
| g | 2010 | [52] | | | | - | | | | - | | - | - | - | - | ||
| h | 2011 | [53] | | | | - | | | | - | | - | - | - | - | ||
| i | 2015 | [54] | | | | - | | | | - | | | - | - | - | ||
| j | 2016 | [55] | | | - | - | | | - | - | | | - | - | - | ||
| k | 2017 | [31] | | | - | - | | | - | - | | | - | | MODELS TACS | ||

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huaquisaca Paye, J.C.; Vieira, J.P.A.; Tabora, J.M.; Leão, A.P.; Cordeiro, M.A.M.; Junior, G.C.; Morais, A.P.d.; Farias, P.E. High Impedance Fault Models for Overhead Distribution Networks: A Review and Comparison with MV Lab Experiments. Energies 2024, 17, 1125. https://0-doi-org.brum.beds.ac.uk/10.3390/en17051125
Huaquisaca Paye JC, Vieira JPA, Tabora JM, Leão AP, Cordeiro MAM, Junior GC, Morais APd, Farias PE. High Impedance Fault Models for Overhead Distribution Networks: A Review and Comparison with MV Lab Experiments. Energies. 2024; 17(5):1125. https://0-doi-org.brum.beds.ac.uk/10.3390/en17051125
Chicago/Turabian StyleHuaquisaca Paye, Juan Carlos, João Paulo A. Vieira, Jonathan Muñoz Tabora, André P. Leão, Murillo Augusto M. Cordeiro, Ghendy C. Junior, Adriano P. de Morais, and Patrick E. Farias. 2024. "High Impedance Fault Models for Overhead Distribution Networks: A Review and Comparison with MV Lab Experiments" Energies 17, no. 5: 1125. https://0-doi-org.brum.beds.ac.uk/10.3390/en17051125