1. Introduction
Urban rail transit is an important part of urban public transport. With the characteristics of large capacity, high speed, security, punctuality, environmental protection, energy saving, and so on, urban rail transit is very popular and is especially suitable for large- and medium-sized cities [
1]. China is the most populous country in the world and is very suitable for the development of urban rail transit. The first subway line in China was constructed in Beijing. Its planning began in 1953; the project was founded in 1965 and completed in 1969; and operations began in 1971. Today, the Beijing urban rail transit system is the second largest city subway system in the world. According to statistics from Beijing Subway, in the first three days of 2016, 16,367,700 passengers were transported, and 16,567 trains ran according to plan. In 2015, 2,832,000,000 passengers were transported, and a total of 2,324,486 trains ran according to plan [
2]. Energy consumption of urban rail transit is much lower than buses or cars per passenger per km. However, the energy consumption of urban rail transit has a considerable scale with a large capacity. How to effectively reduce this energy consumption is a very significant matter.
González-Gil [
3] provided a comprehensive appraisal of the main practices, strategies and technologies currently available for minimizing the energy use of urban rail systems. The two main methods are energy-efficient driving and regenerative braking. The former has been well studied by many researchers [
4,
5,
6,
7], while the latter is a rather new approach [
8,
9,
10]. The braking system of subway trains typically adopts regenerative braking as the main system and air brakes (friction brakes) as a supplement. When the vehicle uses regenerative braking, the motor works in the state of the generator, and the electric energy generated returns to the traction power grid. In an urban rail transit system, the distance between stations is relatively short; thus, the train must perform frequent starting and braking, and this aspect of the braking energy has a great potential for recycling. The regenerative braking energy can reach up to more than 30% of the traction energy. If the regenerative braking energy cannot be used, then it is converted to a resistance brake or air brake, and the braking energy is wasted in vain. The energy that is not used accounts for more than 40% of the total braking energy used.
At present, the effective utilization of regenerative braking energy involves two main aspects of research [
9]. One is using energy storage devices, such as flywheels [
11,
12,
13,
14], supercapacitors [
15,
16,
17,
18,
19,
20,
21] and batteries [
22,
23,
24,
25]. New infrastructure requires a large amount of investment and is not easy to realize. The other method is operation optimization, which is more convenient. This method has also been studied by some researchers. Chen [
26] optimized the timetable to reduce the maximum traction power. Kim
et al. [
27,
28] developed a mixed integer programming model to minimize the maximum traction energy, which occurs when trains are running simultaneously. Gordeon [
29] coordinated multi-trains to reduce the total traction energy. Ramos [
30] coordinated a train’s acceleration and braking time to make full use of renewable energy. Yang
et al. [
31] increased the traction and braking overlap rate of different trains to optimize the timetable, thereby improving the utilization efficiency of regenerative braking. Zhao
et al. [
32] optimized schedules using the simulated annealing algorithm, by analyzing the relative position and running state of the adjacent train. The above researchers did not consider the effect of the traction power supply network. The following research considers the traction network model. Nasri
et al. [
33] optimized a timetable for maximum usage of regenerative braking energy and discussed the headway and stop time effect on the energy consumption. Albrecht
et al. [
34,
35] researched the headway and stop time effect on the energy consumption based on a route in Berlin. In addition, there has also been other research with different parameter optimizations and methods [
36,
37,
38].
In the present paper, the train dwell time is optimized to achieve the purpose of the use of regenerative braking energy. This paper is arranged as follows:
Section 2 outlines the overall situation. A multi-train system for urban rail transit is introduced. The constraint conditions of multi-train operation optimization, considering regenerative braking energy, are analyzed. The principle of dwell time optimization is introduced. In
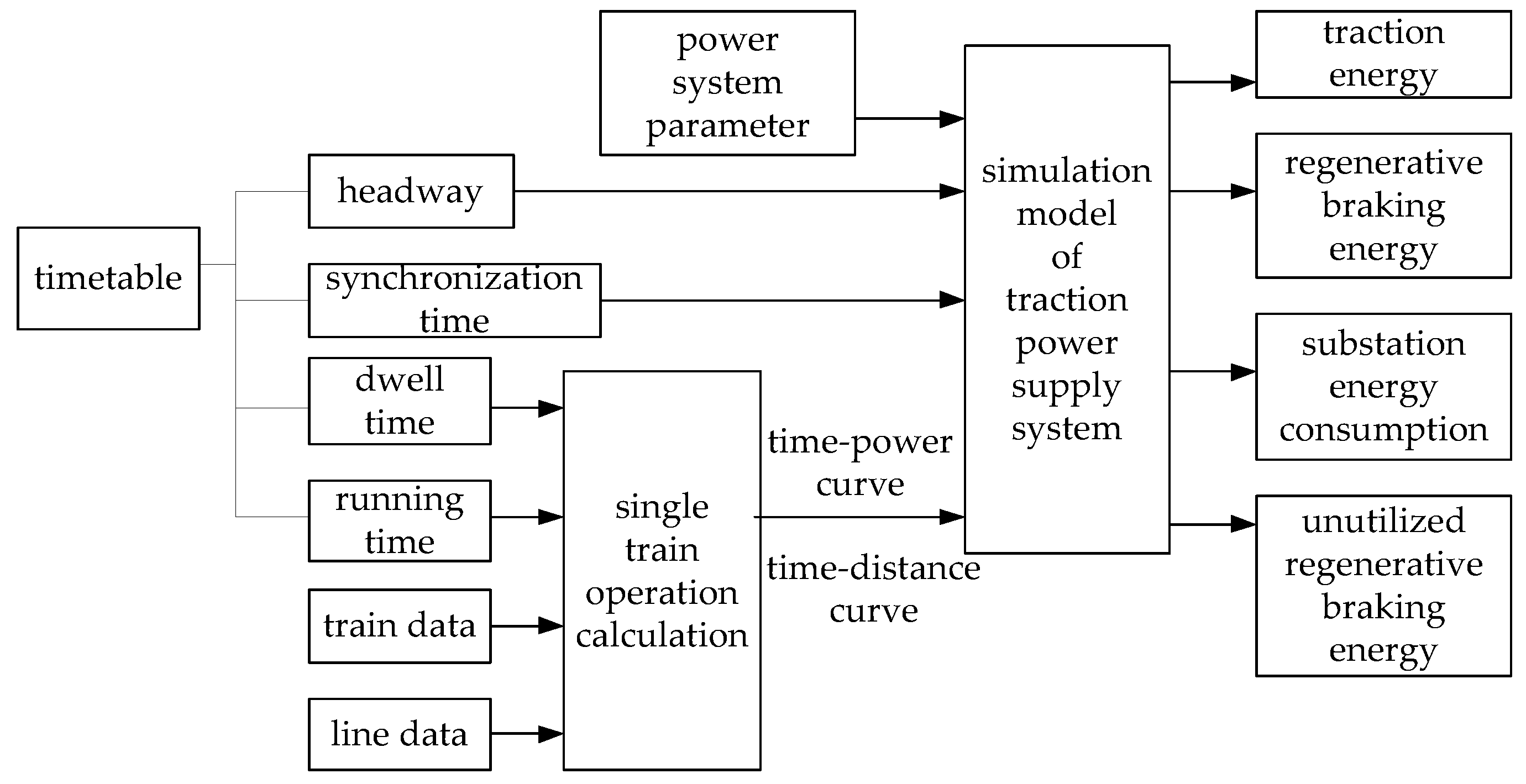
Section 3, a train operation model and tractive power supply system model are established. The optimization goals of multi-train energy saving operation are settled. The calculation flow of multi-train operation is proposed. In
Section 4, the genetic algorithm optimization is described. A mathematical model is established, and the genetic algorithm is introduced briefly. The optimization method and calculation flowchart are proposed. Finally, the actual train data, line data and power supply system data of the Beijing Yizhuang subway line are employed for simulation, and the performance of the simulation system is tested.
2. Multi-Train System for Urban Rail Transit
2.1. Multi-Train System for Urban Rail Transit
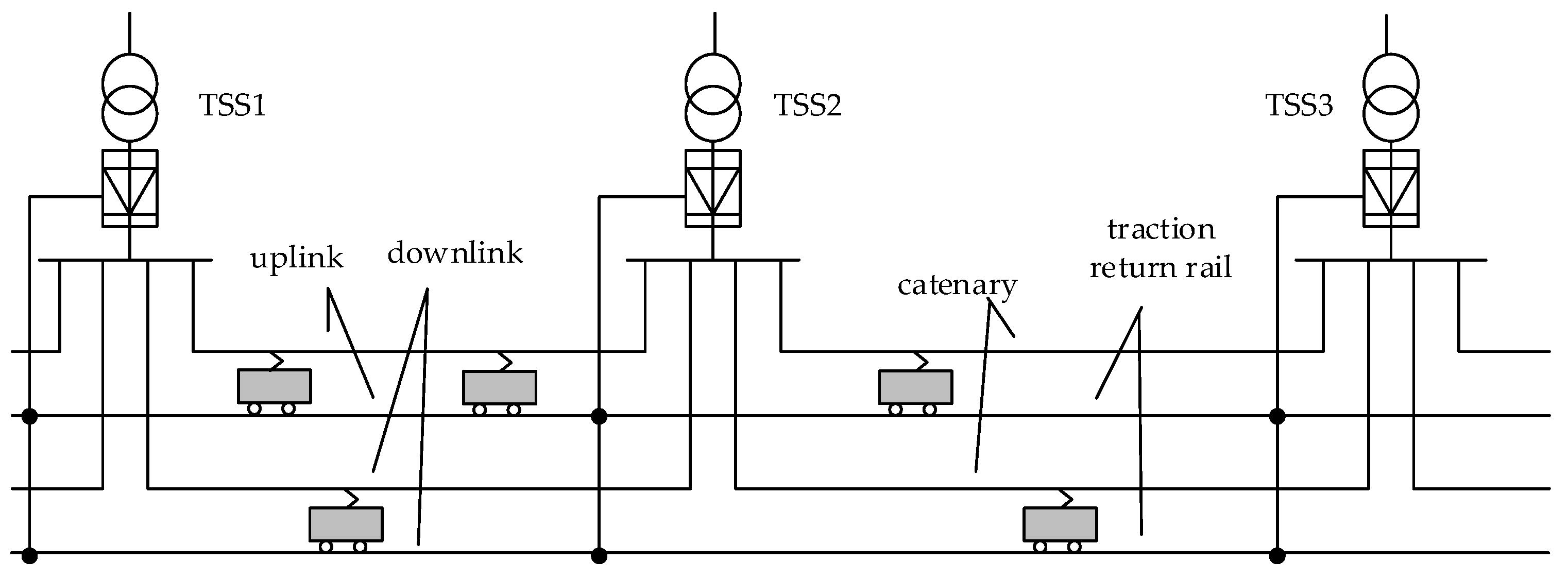
The multi-train operation optimization is based on the single-train operation model. The calculation of the operation of each train is constrained by the traction braking characteristics of the vehicle and line condition. Vehicle characteristics include traction performance of the vehicle, braking performance, performance of the train running resistance, vehicle formation, weight of the vehicle itself and load, etc. Line conditions include the ramp of the line, curve, speed limit, station spacing, etc. For multiple trains operating on the same route, the line conditions of a train running on the same line (uplink or downlink) are the same, and vehicle characteristics are generally the same, while the load of each train varies with the passenger flow.
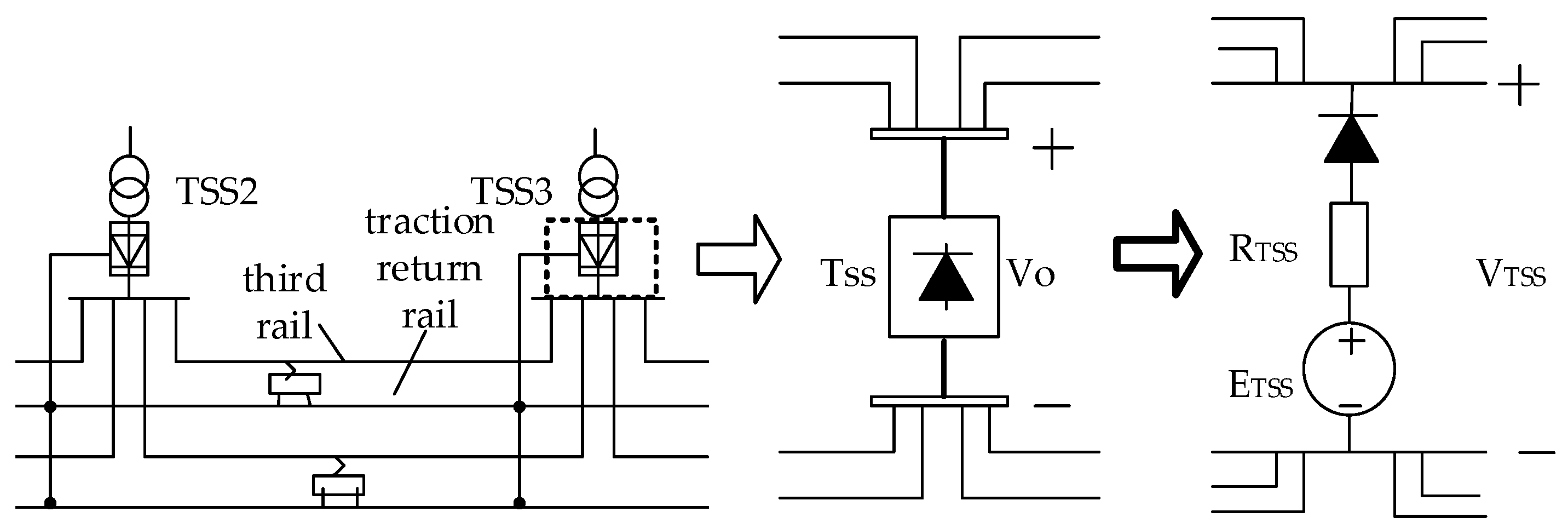
The traction substation in the traction power supply system transfers the three-phase high voltage alternating current (AC) into low voltage direct current (DC) used by urban rail trains. The DC-side power supply system is the part of the whole traction power supply system that directly provides power for the train. It mainly includes the catenary (three rail), the feeder line, the track and the reflux line. The feeder line delivers direct current from the traction substation to the catenary; the train obtains the electric energy through the direct contact of the current collector (pantograph or collector shoe) and the catenary; and the drive traction motor causes the train to operate. The track not only has the function of a guide rail, but also that of conduction reflux, leading the reflux from the track into the traction substation through the reflux line, as shown in
Figure 1.
2.2. The Constraints of the Traction Power Supply System
The constraints of the traction power supply system when the train is operating are mainly as follows [
39]:
For urban rail transit traction power supply systems, due to the fact that the DC traction substation adopts the diode rectifier, the energy has unidirectional liquidity, and regenerative braking energy cannot flow from the substation to the power supply network.
Feeder loss. Due to the resistance of the traction network, line loss is inevitable, and the line resistance changes with the change of the train operation position.
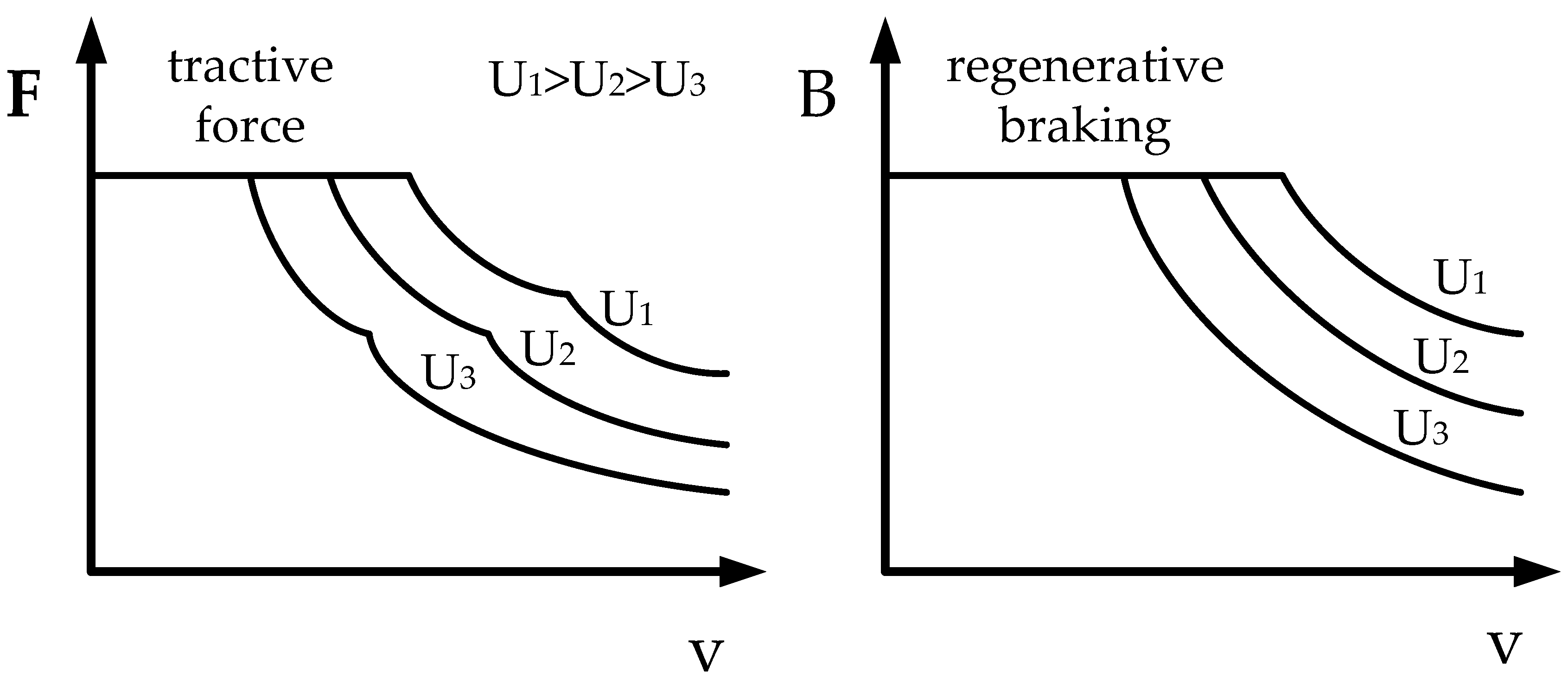
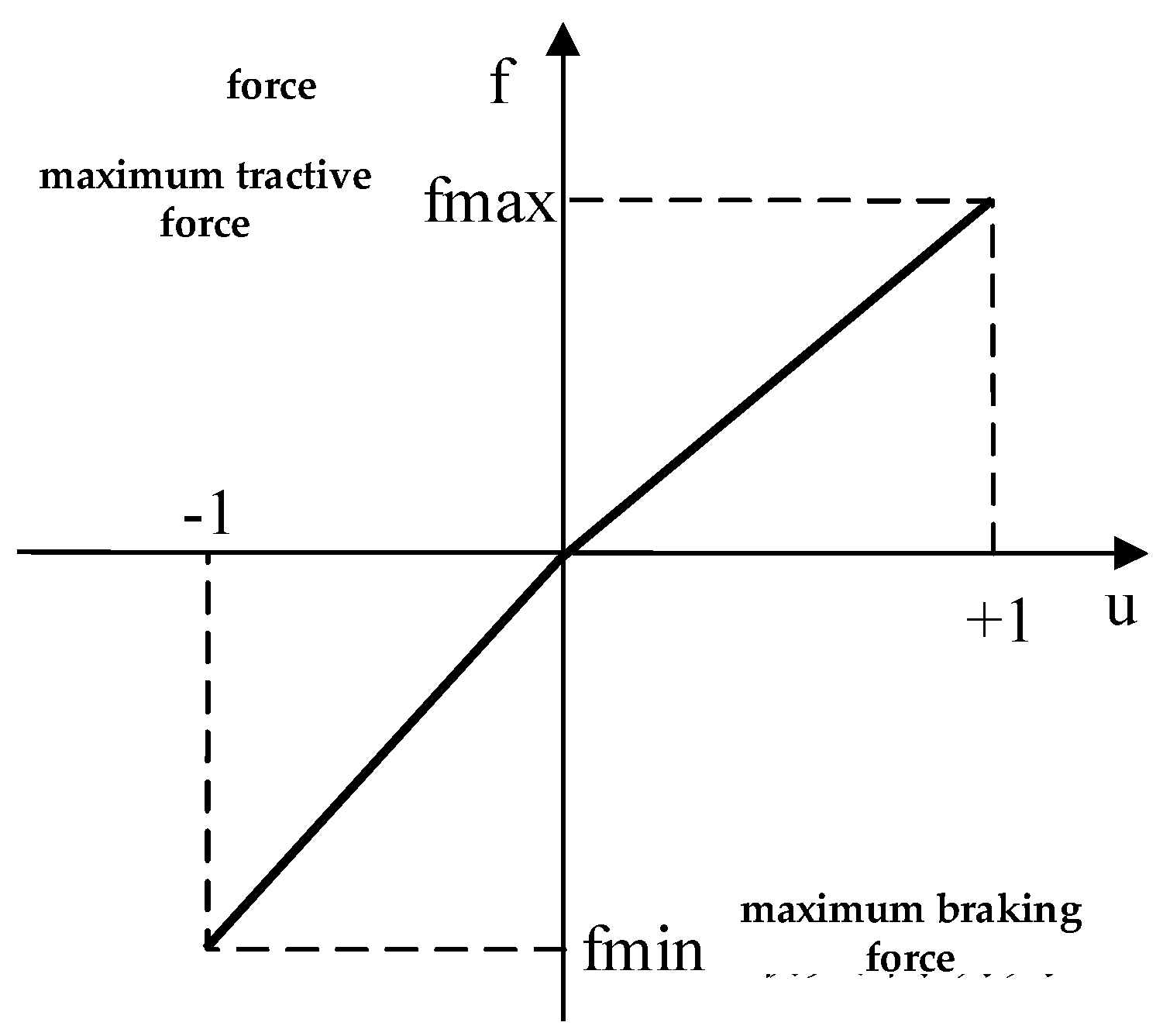
The train’s traction and regenerative braking curve are constrained by the traction network voltage, as shown in
Figure 2, and the drop of traction network voltage, train tractive and regenerative braking capacity will be limited.
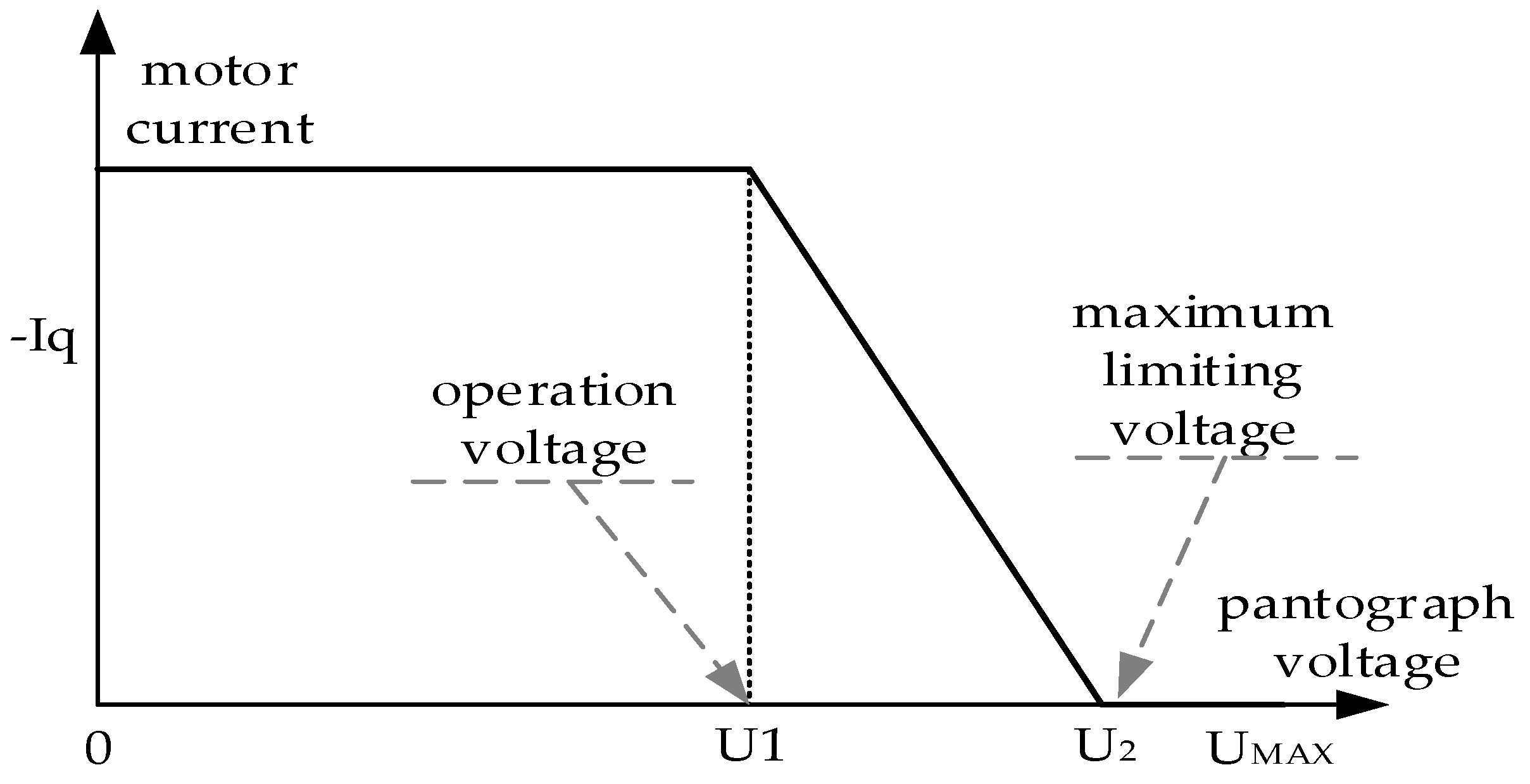
The regenerative braking is restricted by the traction network voltage. With the increase of traction network voltage, the regenerative braking power is limited. As shown in
Figure 3, when the network voltage rises to U1, the train limit motor current reduces the output of the regenerative braking power; when the network voltage reaches the maximum limit voltage U2, then the regenerative braking is removed, and the motor current is zero.
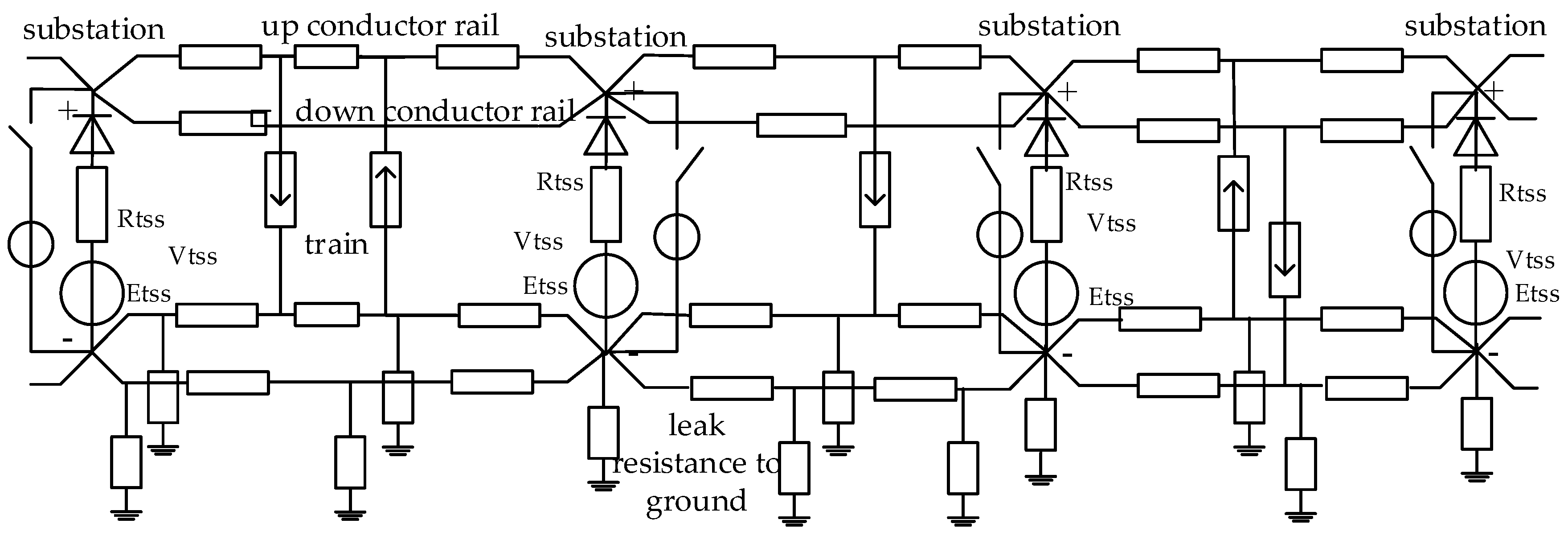
If there are energy storage devices (such as a super capacitor) in the line, they will affect the charging state of the energy storage device. For multi-train operation, to accurately calculate the energy consumption of the system and the utilization of the regenerative braking energy, a complete simulation model of the train and traction power supply system is required. The model of the traction power supply system includes the model of the substation, the model of the rectifier unit, the resistance model of the line, the model of the train, the model of the braking resistance, etc.
2.3. Principles of Dwell Time Optimization
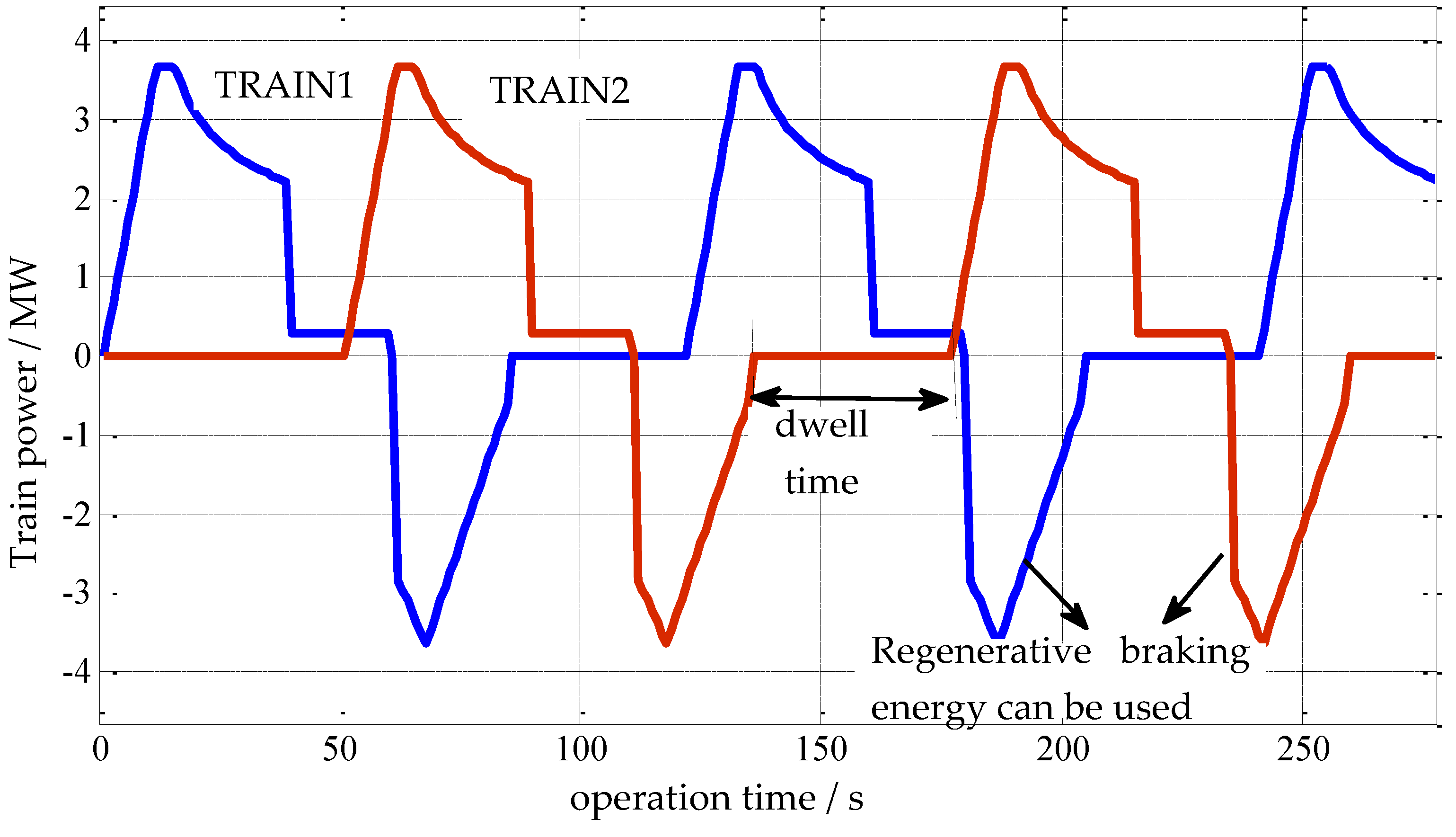
Urban rail transit system station spacing is relatively short, usually 1.5–2 km; thus, it must be able to quickly start or stop; the train’s traction acceleration is generally 0.9–1.0 m/s2, and braking deceleration is about 1.0 m/s2. Taking the Yizhuang Line as an example, it takes about 39 s to accelerate to 80 km/h; the maximum power needed for traction is about 3.6 MW; and traction energy consumption is 28 kW·h. It takes about 27 s from the speed of 80 km/h to stop, the maximum power of regenerative braking is approximately 3.6 MW; the produced regenerative braking energy is about 16 kW·h; and train dwell time in the stop is generally 30–35 s. A reasonable adjustment of the dwell time can improve the possibility that traction conditions and braking conditions occur at the same time with different trains, thus allowing the traction train to absorb greater regenerative braking energy and improve the regenerative braking energy utilization rate of the train.
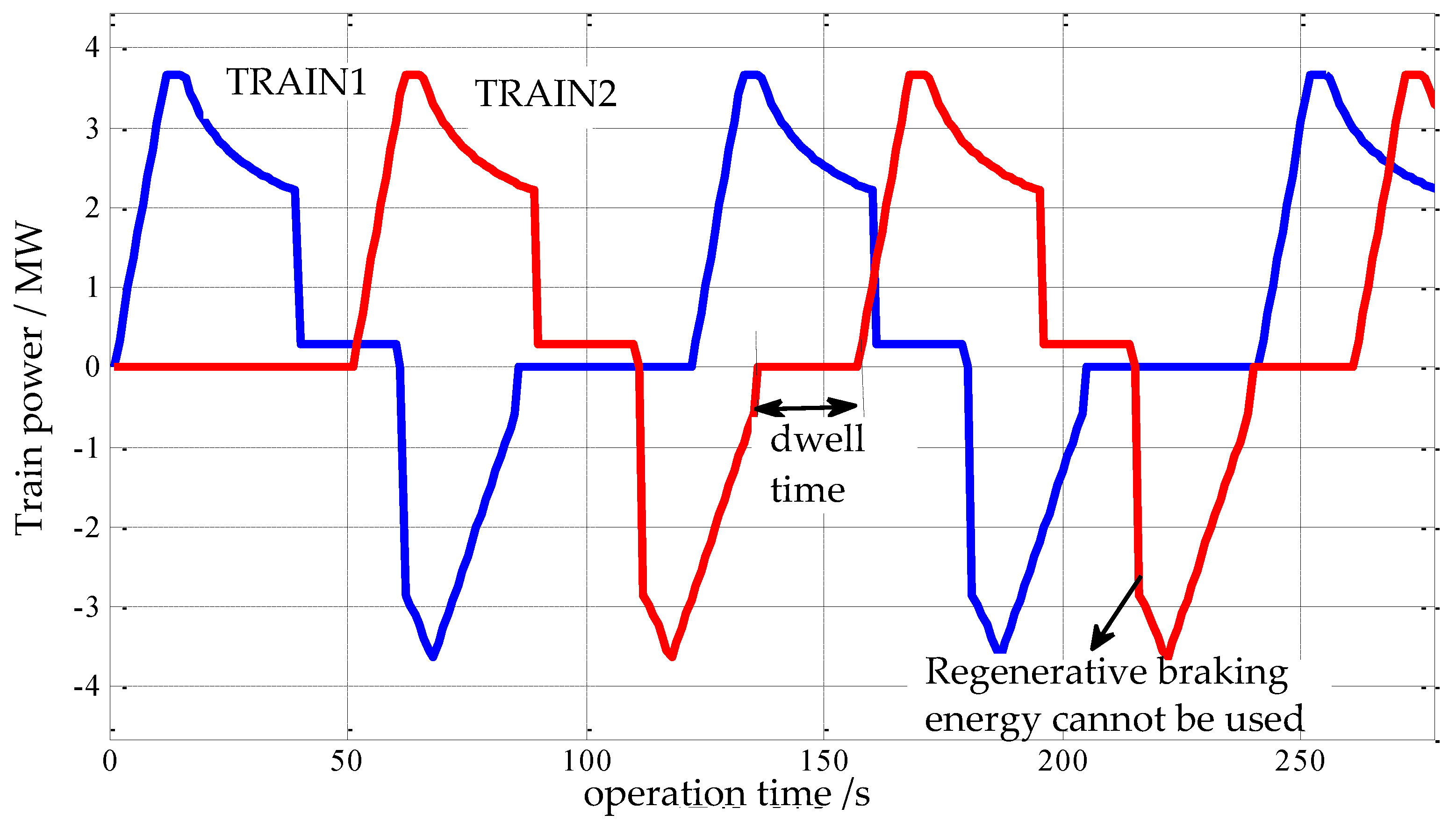
Figure 4 and
Figure 5 are the power curves of two trains running in the same power range, and the blue and red curves represent Train 1 and Train 2, respectively. Train 2 starts 50 s after Train 1. The two train power curves are the same. In
Figure 4, Train 2 operates at the first station. At 118–135 s, then the traction and braking of Train 1 and Train 2 overlap, and Train 1 can use the regenerative braking energy of Train 2; at 179~198 s, Train 2’s traction condition and Train 1’s braking condition overlap, and the regenerative braking energy of Train 1 is partly used by Train 2; at 210 s and later, Train 1 stops, Train 2 brakes, and the regenerative braking energy of Train 2 cannot be used. In
Figure 5, the dwell time of Train 2 is extended, and the starting time of Train 2 in the second station is delayed. It can be seen that, compared to
Figure 4, in
Figure 5, the train operating condition overlapping time is extended from 179~198 s to 179~205 s, and Train 2 uses more regenerative braking energy from Train 1, while the overlapping time of one train’s traction condition and another train’s braking condition is added to the 235~260 s. From
Figure 4 and
Figure 5, it can be seen that the adjustment of the stop time has a great impact on the regenerative braking energy.
Therefore, based on the existing schedule, reasonably adjusting the stop time of the train can effectively increase the overlapping time of the train traction and braking, so that more regenerative braking energy is utilized by the traction train nearby, thereby improving the utilization efficiency of regenerative braking energy and reducing the system total energy consumption.
4. Genetic Algorithm Optimization
Based on the mathematical model of the multi-train operation established above, the dwell time influence on the regenerative braking energy utilization and total energy consumption of the system is researched. The energy consumption model based on the dwell time is established and is optimized with genetic algorithms. Simulation and verification are performed based on the actual data of the Yizhuang Line.
4.1. Mathematical Model
The research of the dwell time is based on the assumption that the headway, synchronization time and inter-station travel time are all fixed.
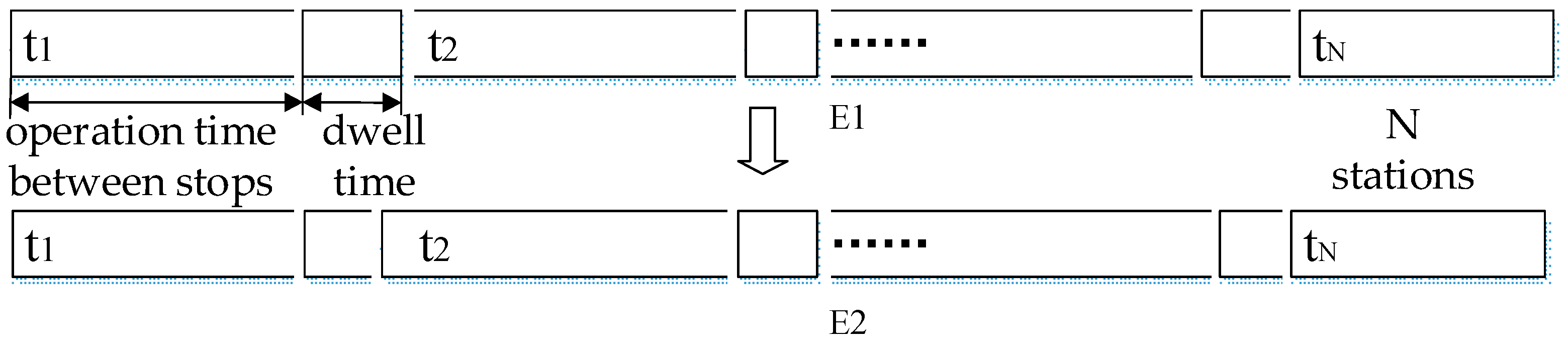
Figure 10 is the schematic diagram of the dwell time modification. Assuming that the number of stations in the line is
N, then the dwell time at each station of the line are:
t1,
t2,
…,
tN, where
tN is the dwell time at the N-th station. The total energy consumption of the system is different with different dwell time combinations; thus, the problem can be abstracted as a combinatorial optimization problem of dwell time and energy consumption, such as shown in Equations (17) and (18).
For
N stations, assuming that the dwell time of train,
tstop, has
k combinations, then
tstop_i is the
i-th dwell time combination.
k combinations of dwell time have corresponding system total consumption
Ei:
For urban rail transit, there are typically 10–15 stations. Assuming that the dwell time of each station is adjusted by −5 s–+5 s on the basis of the original schedule, there are 1010–1015 combinations of dwell time. The number of combinations is very large, too large to be enumerated; thus, an optimization algorithm is required for the solution. In a variety of heuristic algorithms, genetic algorithms operate directly on the structure of the object, with no derivation or function continuity limit, thus allowing the use of a very complex fitness function (also known as the target function), and the variable range of variables can be restricted. Randomization optimization methods can automatically obtain and guide the optimization search space and do no need to identify the rules; thus, they are more suitable for optimization in which time is the variable. Therefore, this paper uses a genetic algorithm to optimize the dwell time.
4.2. Introduction of Genetic Algorithm
A genetic algorithm is a random search algorithm, referencing biological natural selection and genetic mechanisms. Different from traditional algorithms, genetic algorithms search from a randomly-generated initial solution, and through the selection, crossover and mutation operations iterate step by step to produce new solutions. Each individual in a group is a solution, called chromosomes. The merits of chromosomes are evaluated by the fitness function. According to the fitness value, we select a certain number of outstanding individuals from the previous generation, to form the following group through crossover and mutation operations. After several generations of evolution, the algorithm converges to the optimal chromosome, i.e., the final solution of the problem.
4.3. Optimization Method
Different combinations of dwell time have different impacts on the energy consumption of the power supply system. By means of the genetic algorithm to encode each dwell time, the optimal combination of the dwell time can be solved.
Assuming that the train headway and synchronization time of the uplink and downlink train are fixed at the same period, the train operation curves in the same direction are the same (
i.e., the operation curves of the uplink trains are the same, and the operation curves of the downlink trains are the same), and the dwell times of the uplink and downlink trains at the same station are the same, as shown in Equation (19).
where
N is the number of stations;
ti is the dwell time of the
i-th station;
tdown is the dwell time combination of downlink line; and
tup is the dwell time combination of the uplink line.
Based on the above assumptions, we can build a dwell time optimization model based on the genetic algorithm.
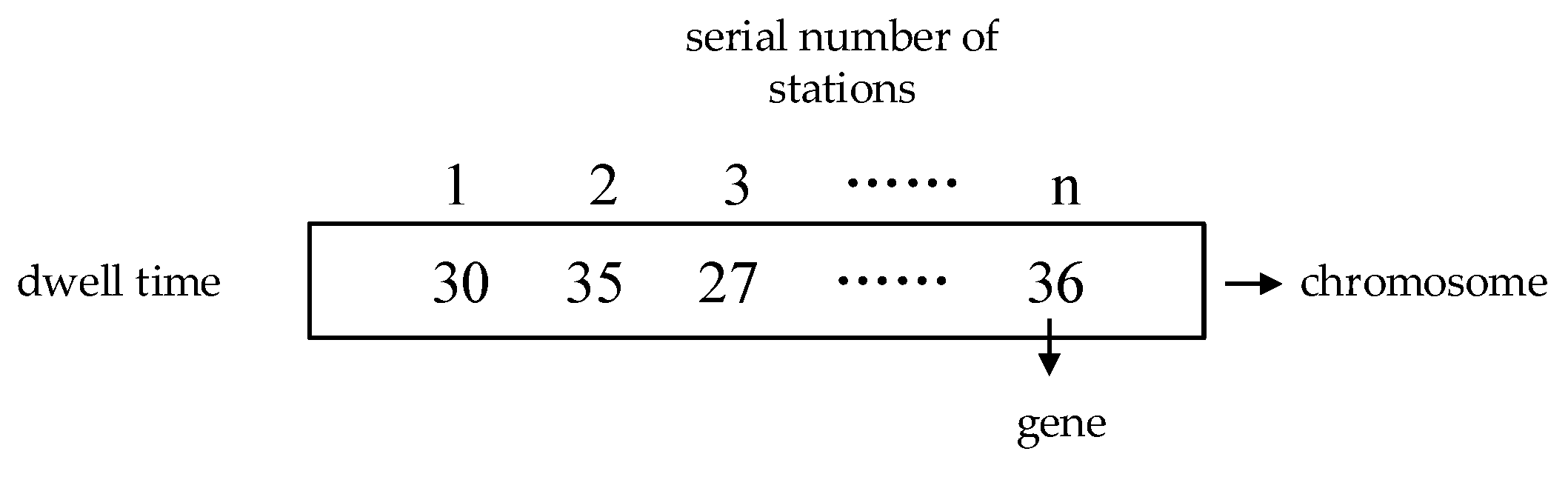
4.3.1. Encoding
The optimization parameter is the train dwell time; thus, the collection of the train dwell time at each station is encoded as a chromosome, and each station dwell time is the gene forming the chromosome. Using real numbers to encode the dwell time, the schematic diagram of dwell time encoding is shown in
Figure 11.
In an urban rail transit system, the length of the train dwell time is related to the number of passengers, the number of train doors and other factors [
45]. In order to ensure the boarding/alighting needs of passengers during actual operation, this paper optimizes the dwell time based on the existing train schedule in a certain range. Therefore, the encoding must restrain the size of the gene, e.g., the dwell time is required within 25–45 s for each station, or adjusted within −5 s–+5 s on the basis of the original dwell time, to ensure the feasibility of the dwell time after optimization. Using the genetic algorithm, the initial population is generated, and for each chromosome, the genes must satisfy Equation (20).
where
tup_limit is the upper limit of dwell time; and
tlow_limit is the lower limit of dwell time.
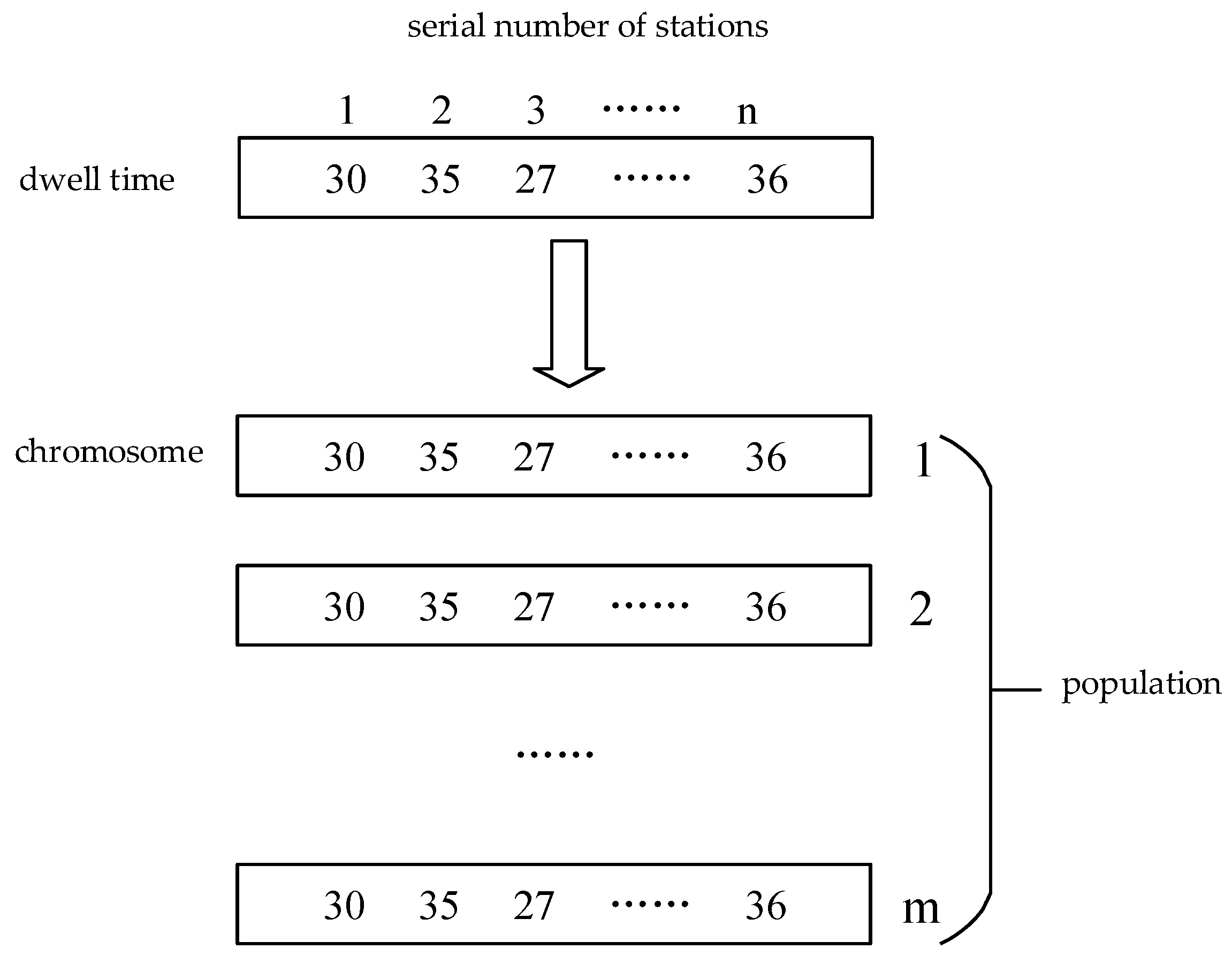
4.3.2. Generating the Initial Population
According to the genetic algorithm, the initial population of the combination of different dwell times is randomly generated, as shown in
Figure 12.
4.3.3. Fitness Function
The optimization of the train dwell time affects the utilization of the regenerative braking energy when the multi-train is operating. The electric energy used by the train originates from the traction substation, thus the optimization objective function is the total energy consumption of the traction power supply system. The negative value of the energy consumption of the fitness function is shown in Equation (21).
where
Ps is the total power of all substations; and
T is the total operation time.
4.4. Calculation Flowchart
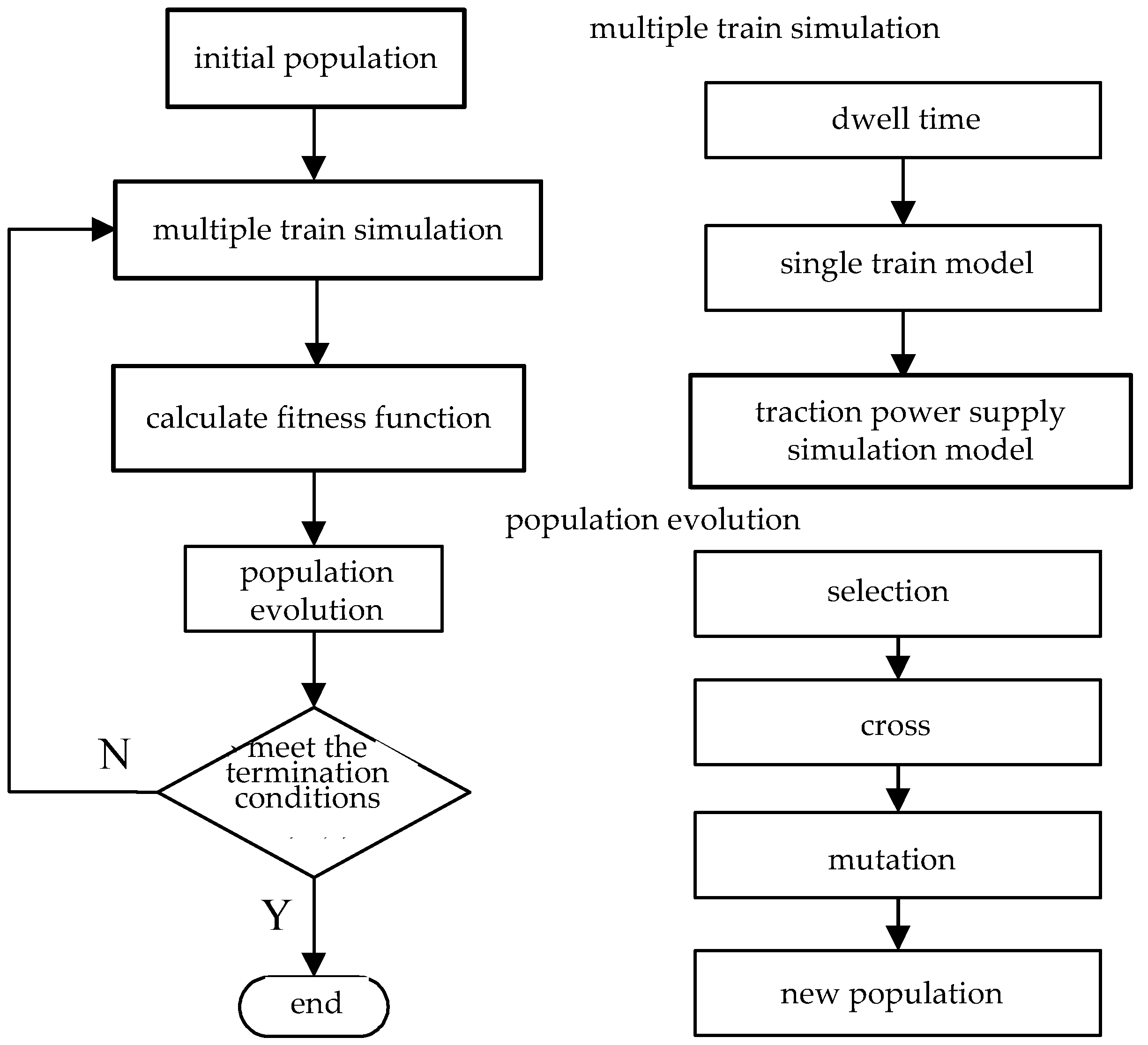
Figure 13 is the algorithm flowchart of the train dwell time optimization using a genetic algorithm.
The first generation of the population is generated randomly, and the m individuals generated correspond to the collection of dwell time, where m is the population quantity.
Combining the dwell time in Step 1 and train operation data, the input direct current supply model is used to establish the corresponding circuits to calculate the electric and energy consumption data of the trains and power substation.
According to the fitness function, Equation (20) is used calculate the fitness value of each individual.
According to the fitness value calculated in Step 3, we perform genetic manipulation, such as selection, cross, mutation, and so on, to generate a new population.
We determine whether the termination conditions are met, and if they are not satisfied, the new generation of population data will be input into Step 2 to continue the calculation; if they are satisfied, then the calculation and output results are terminated.
5. Dwell Time Optimization Based on Yizhuang Subway Line
The traction power supply system of the Beijing subway Yizhuang Line adopts the distributed power supply mode, with a total of 12 traction substations. The traction substation adopts the 24-pulse rectifier, as described in detail in
Section 3.2.1. Regenerative braking absorbing resistors are set in each of the traction substation. Using the third rail power supply mode, the rated voltage is DC 750 V.
The train equivalent mass of Beijing Yizhuang subway line with different load cases is listed in
Table 1. In
Table 1, AW represents the train passenger capacity. AW0 represents no passengers. AW2 represents rated passenger capacity. AW3 represents overload passenger capacity. M represents motor car, T represents trailer car and Tc represents trailer with a cab. AW3 is the normal operation condition of Beijing Yizhuang subway line. The simulation data are AW3 level. Train and line parameters are listed in
Table 2. A single motor rated power is 180 kW. There are four motors.
The Yizhuang subway line has a total of 14 stations. According to the current actual operating schedules, the dwell times of each station are listed in
Table 3. The dwell time throughout the day of each train is the same, and the dwell time of the same station of up trains and down trains is the same.
Using the genetic algorithm to encode the 12 dwell times, the upper and lower bounds of the dwell time of each train are bound to the −5–+10 s range of the original stop time. In the simulation, the headway is 5.5 min; the synchronization time of the up train and the down train is 3.5 min; and the train operation data use automatic train operation (ATO) actual operation data. The genetic parameter settings are shown in
Table 4.
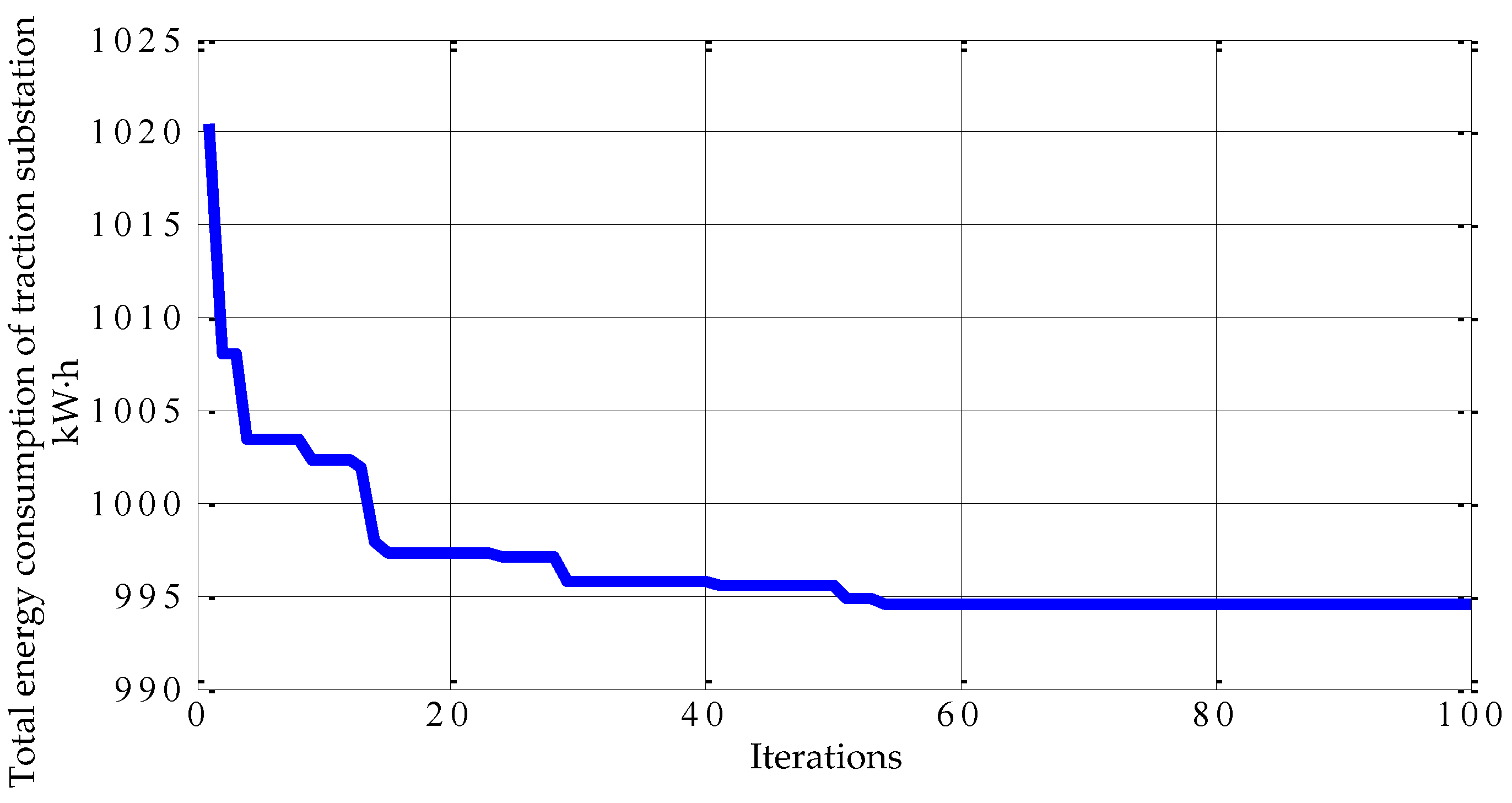
Figure 14 is an evolution of the search for the optimal solution in the algorithm calculation process.
Table 5 shows the constraint conditions of dwell time and the results of the dwell time optimization in the simulation. It can be seen that the dwell time after the optimization is only increased by 29 s, while the whole running time of the Yizhuang Line is about 34 min; thus, the impact on the running time is minimal.
Table 6 shows the energy consumption changes before and after dwell time optimization. It can be seen that the system total energy consumption is decreased from 1084 down to 995 kW·h, a decrease of 8%; meanwhile, the utilization rate of regenerative braking is improved from 71%–79%, for an improvement of 8%. Based on the genetic algorithm, the dwell time optimization effect is significant; the total energy consumption is reduced; and the utilization rate of regenerative braking is improved.
Assuming that the train operation curve is unchanged in simulation, namely the train running time between stations is fixed, only the dwell time is optimized. As for the train, because the operation curve is the same, the train traction energy consumption and regenerative braking energy are the same before and after optimization. The fact that the energy consumption of the train traction and regenerative braking energy before and after optimization have a certain difference, as shown in
Table 6, is a result of the simulation results when compared to the multiple trains running results in fixed 15 min; before and after optimization, the dwell time of the train changes; the input power of train operation is different in the same time.
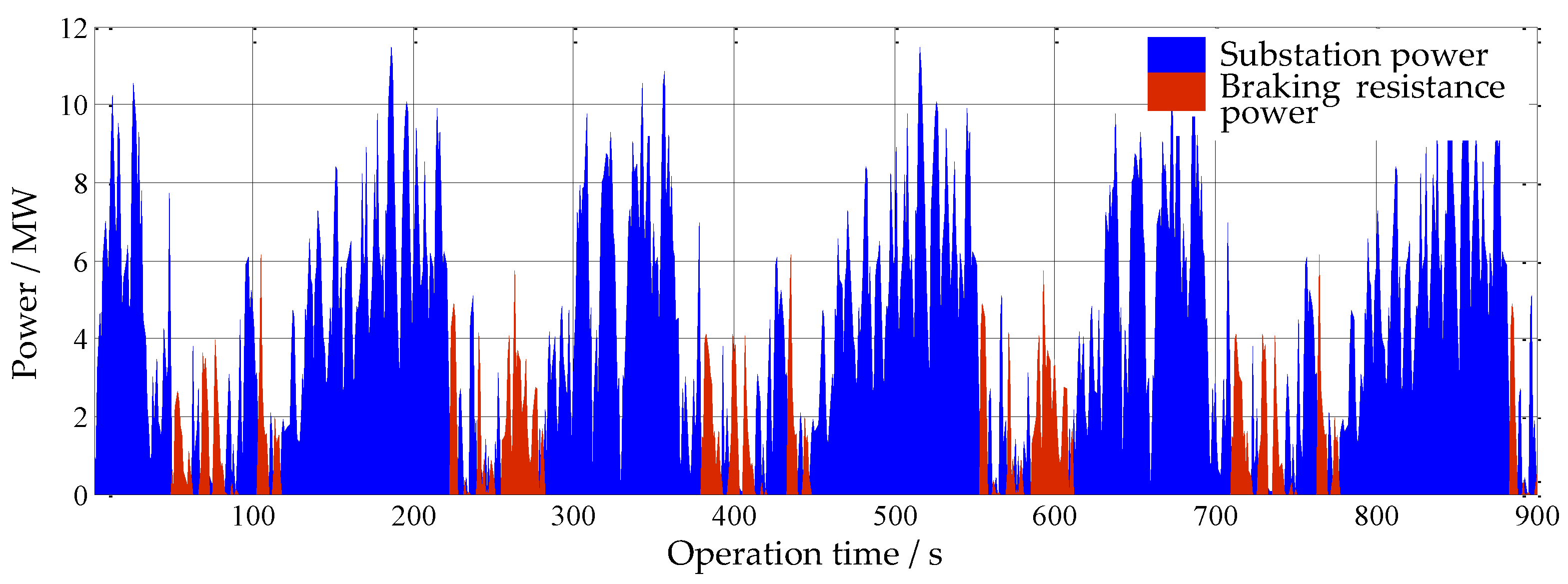
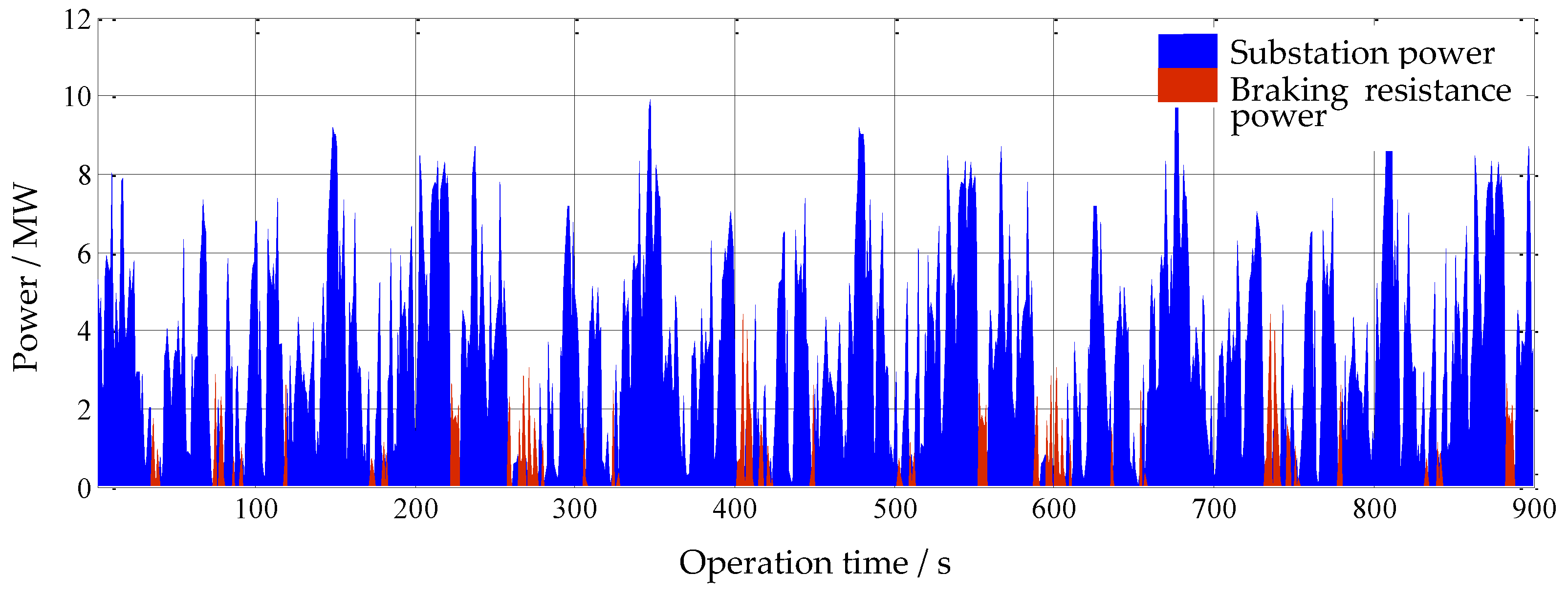
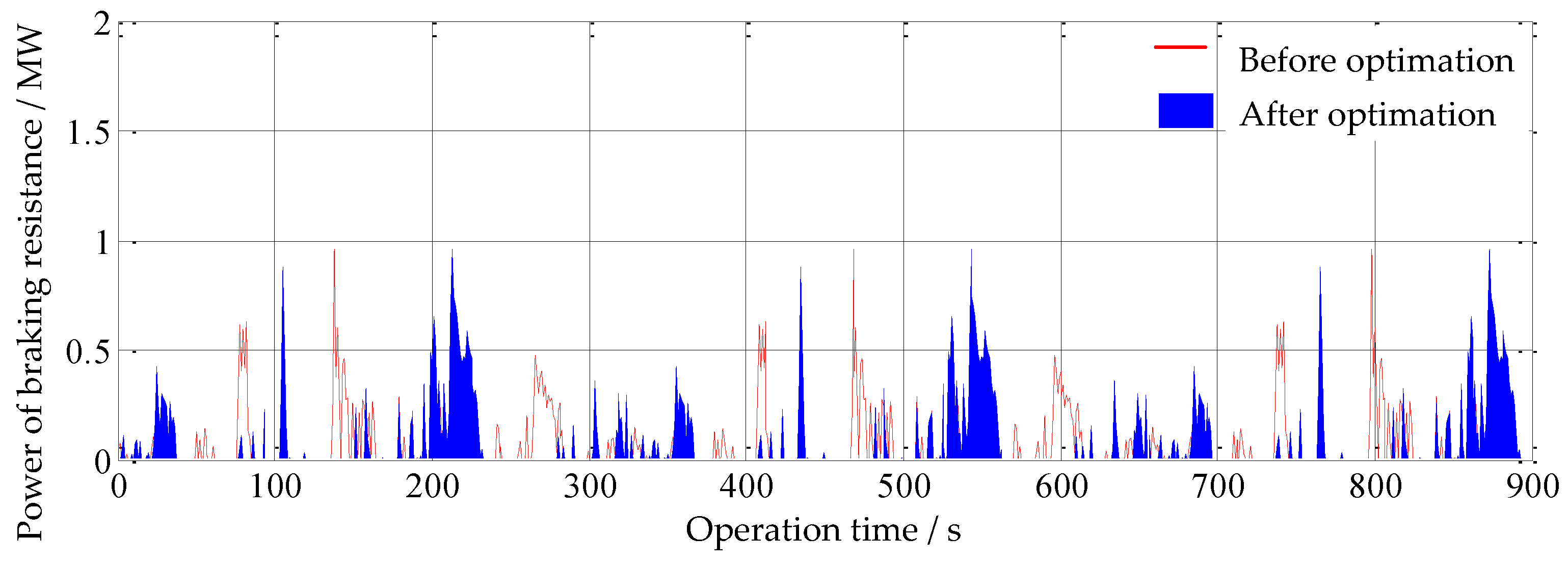
Figure 15 and
Figure 16 are the total output power of the traction substation and the absorption power of braking resistance before and after dwell time optimization, respectively. For the convenience of comparison, in the figure, the power curve is filled with color; the envelope curve is the power value; the area surrounded by the envelope is the value of energy consumption. The blue curve is the total power of the substation, and the red curve is the total power absorbed by the braking resistance,
i.e., the regenerative braking energy cannot be used. By comparison, it is clear that the optimized substation output energy consumption value is smaller; the energy consumption in the simulation time is quite average; and the energy absorption of the braking resistors decreases significantly.
From the peak value of power, the peak value of the output power of the traction substation and absorption power of braking resistance are both decreased. After optimization, the peak value of the output power of the traction substation decreases from 11.5 down to 9.9 MW, for a decrease of 14%; and the peak value of the absorption power of braking resistance is decreased from 6.2 down to 4.4 MW, for a decrease of 29%.
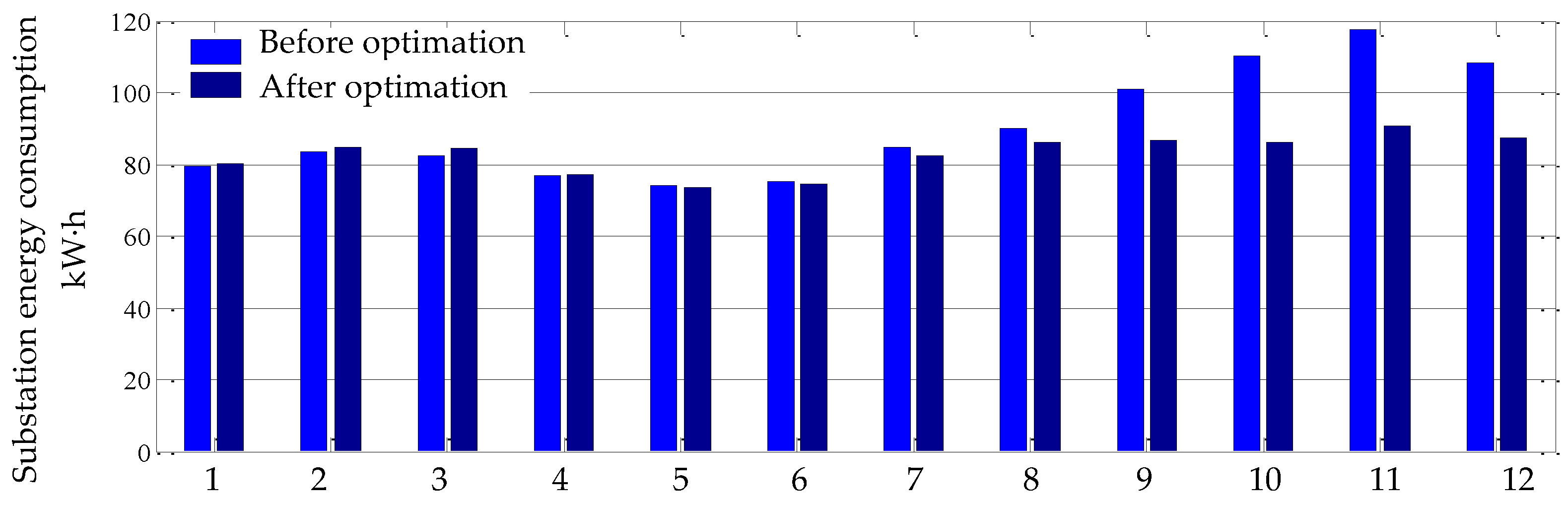
Figure 17 is the energy consumption comparison chart of each substation before and after dwell time optimization. It can be seen that the energy consumptions of the Yizhuang Railway Station, Ciqu South, Jinghailu and Tongjinanlu substations change greatly, while those of Songjiazhuang and other stations do not change significantly or are increased. Taking Yizhuang Railway Station and Songjiazhuang as examples, the substation power and absorption power of braking resistance are analyzed.
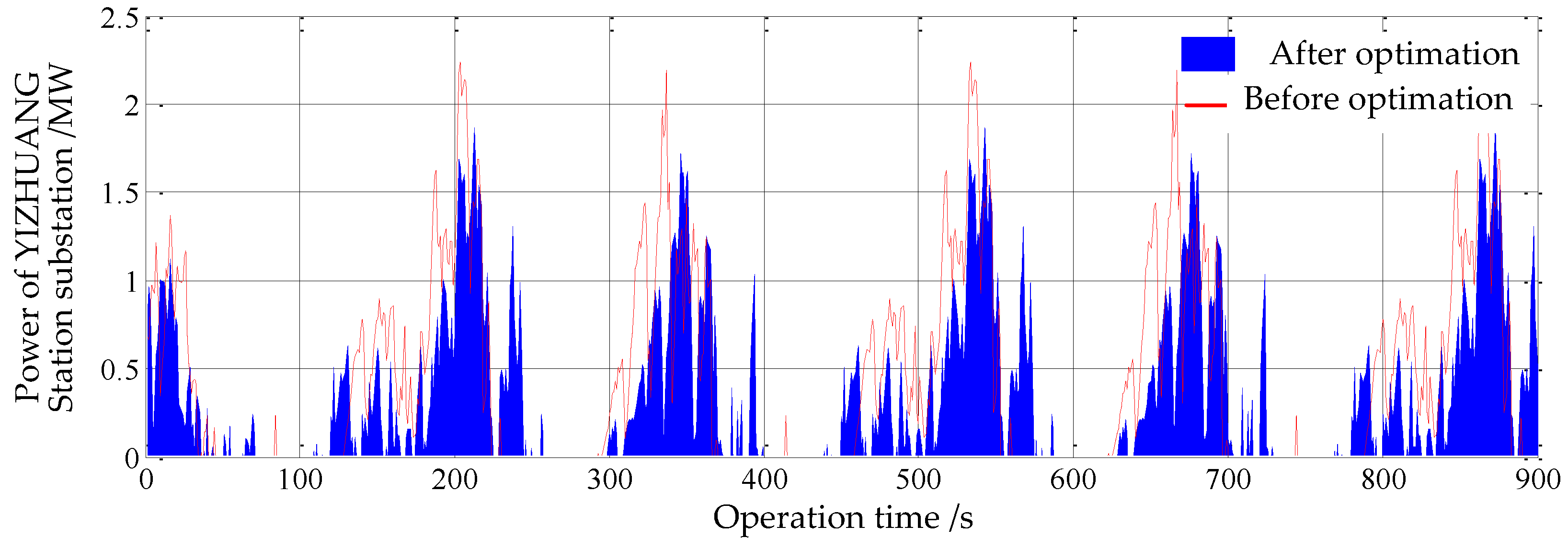
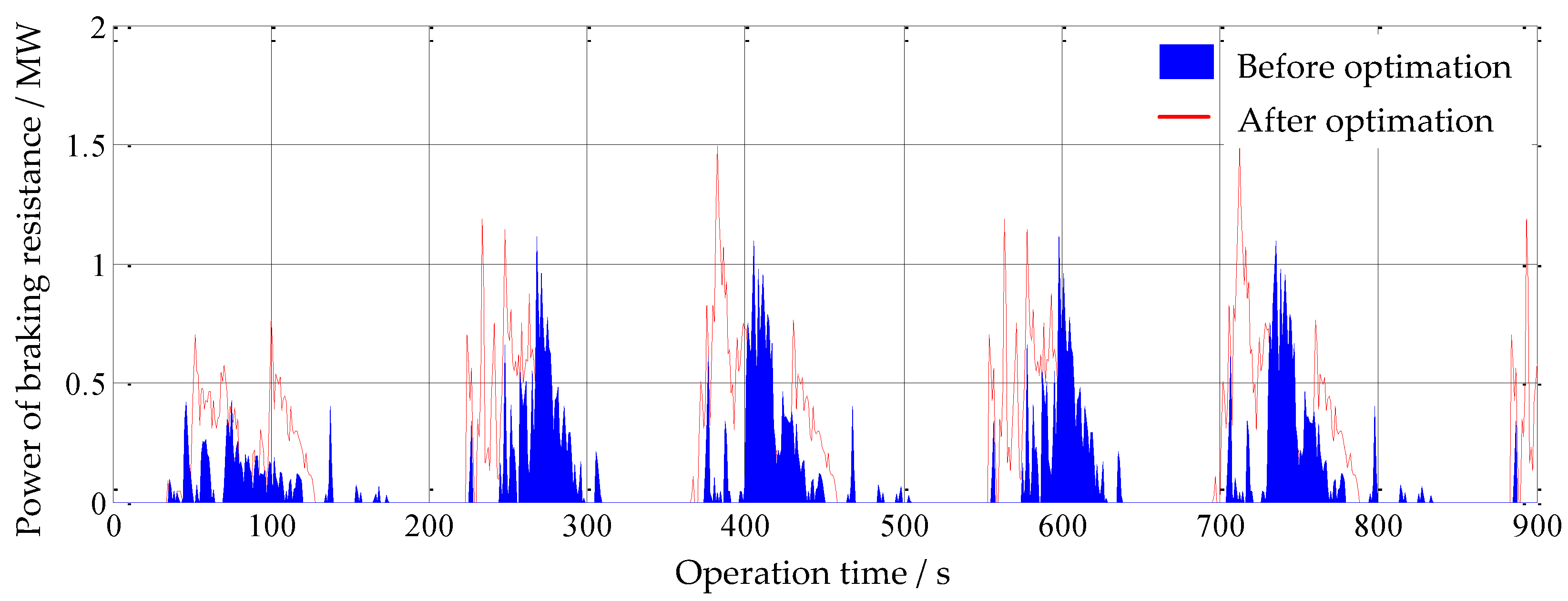
Figure 18 and
Figure 19 show the substation output power curve and braking resistance absorption power curve of Yizhuang Railway Station before and after dwell time optimization, respectively. For the convenience of comparison, the power curve before optimization is red, and that after optimization is blue. After the dwell time optimization, the substation traction power decreases obviously, and the absorption power of braking resistance also decreases; thus, the traction energy consumption values of the Yizhuang Railway Station substation decreased significantly.
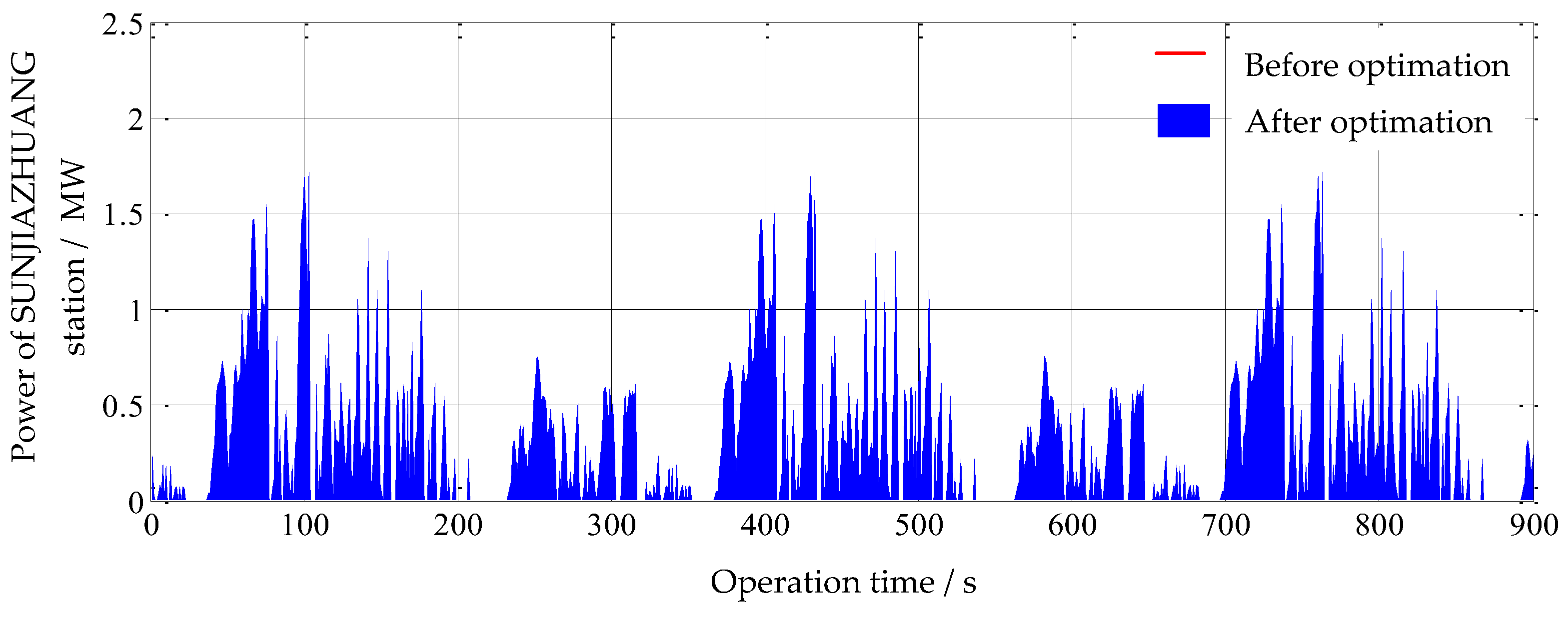
Figure 20 and
Figure 21 respectively show the substation output power curve and braking resistance absorption power curve of Songjiazhuang before and after dwell time optimization. It can be seen that the substation power and absorption power of the braking resistance are not significantly reduced nor increased at Songjiazhuang before and after the optimization; thus, the change of the power consumption of the substation at Songjiazhuang is minimal.
6. Conclusions
In this paper, the basic principles of train energy saving optimization based on dwell time are introduced, and the optimization model based on dwell time is established. With the system total energy consumption minimum as the objective function and based on the multi-train operation model and power system simulation model, while using a genetic algorithm, the optimization model of the dwell time is solved. In addition, taking the Yizhuang Line as an example, based on the Yizhuang Line current dwell time and under the condition of the train running time increasing by 29 s, the regenerative braking rate of the system is increased by 8%, and the total traction energy consumption is reduced by 8%; thus, the total traction energy consumption is reduced by 8%. The results show that using this method is practical and effective.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}