
Energy Conversion Strategies for Wind Energy System: Electrical, Mechanical and Material Aspects

 and
and
Abstract
:1. Introduction
1.1. A Brief History of Turbine Energy Conversion Technology
1.2. History of Wind Turbine Technology
1.3. Review Outlook
2. Classification of Wind Energy Conversion Systems (WECSs)
2.1. Rotational Axis
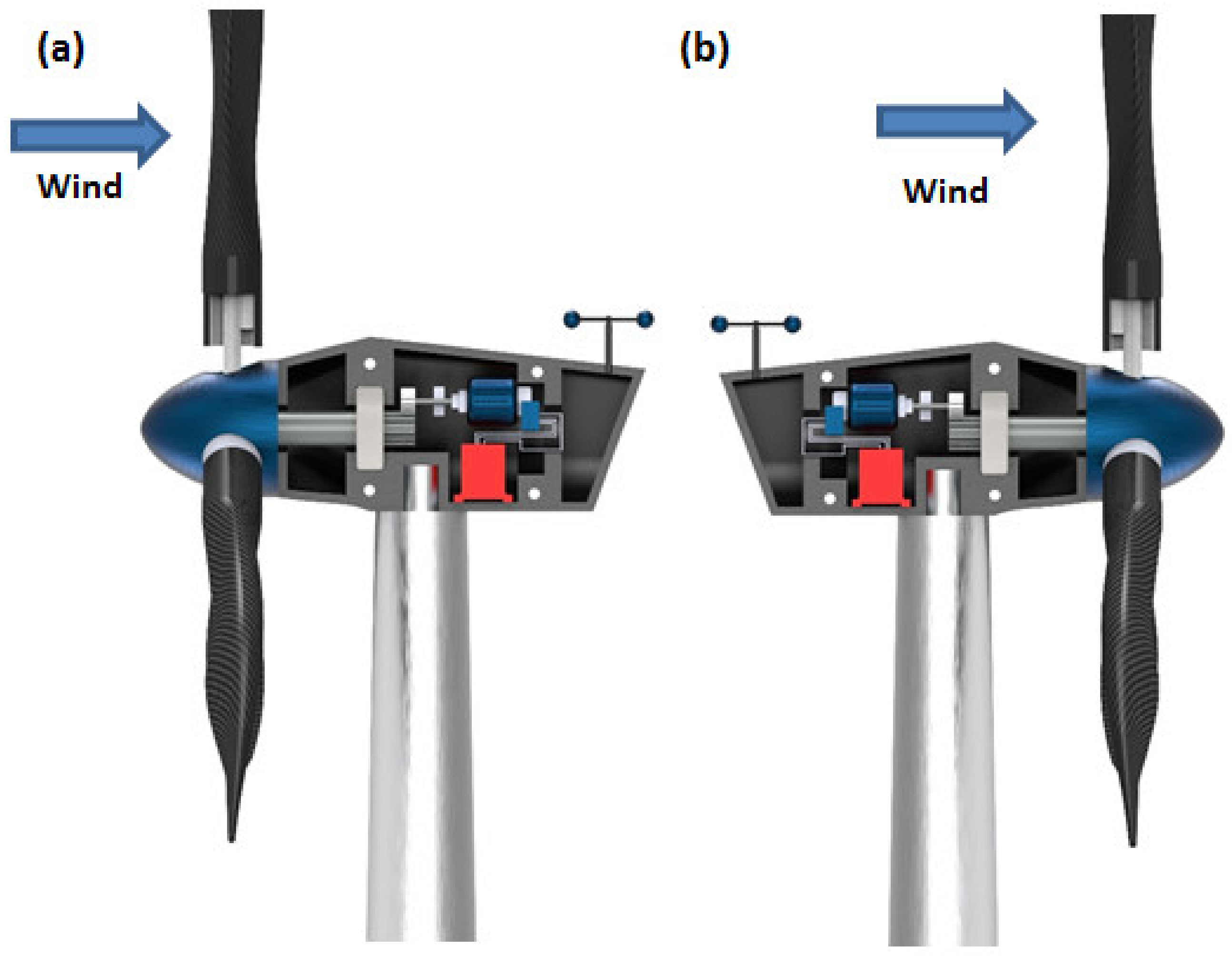
- Horizontal Axis Wind Turbines: The shaft of the turbine and the shaft of the generator are placed parallel to the plane of the ground and mounted to a certain height to face the required wind speed depending on the geography. The elevated height of the turbine also facilitates the turbine to rotate with enough clearance to the ground. The mechanical components of the turbine are enclosed in a housing, which is shaped aerodynamically called a nacelle. The nacelle in this case is directly behind the rotor. According to the placement of the nacelle with respect to the turbine and tower, there are upwind and downwind HAWTs as shown in Figure 1 [28,29]. Upwind HAWTs have the turbine facing the direction from which the wind is blowing. The direction is adjusted automatically by the use of rudders. The downwind HAWTs have the turbine facing away from the direction of the wind flow. This type of HAWT faces the problem of vibrations in the blades due to the wind interacting with the nacelle first, making the wind turbulent. Commercial turbines incorporate the HAWT design mostly with three blades. However, two blade designs are also used on a very small scale. HAWTs demand high structural strength since the turbine, gearbox, generator, and so on are placed high above the ground.
- Vertical Axis Wind Turbines: This type of turbine has the turbine mounted on the shaft, which doubles up as the tower of the turbine structure and the rotor’s blades are vertically placed aerofoil sections. However, various designs of VAWTs are available, like Darrious and Savonious rotor turbines [30]. The installation and maintenance of these types of turbine are relatively cheaper and easier than other types. Since the turbine blades do not have to clear the distance between the ground and the hub of the rotor, the length of the tower can be kept short, which also helps to reduce the vibration of the shaft due to the rotating mass. However, the shaft does not need to hold the weight of the entire gearbox and control mechanisms as those components are placed at the base of the shaft near the ground. VAWTs are subjected to varying wind loads, differing with the height of the blade. Higher wind loads are experienced at the top of the turbine than the loads experienced at the bottom, rendering lower energy conversion efficiency. Thus, their uses for high-power application are restricted commercially.
2.2. Turbines
- Low Power turbines: These are turbine systems capable of producing on average a maximum of 30 kW. These systems find use in remote locations for household electricity demands and charging up of batteries. They are also used in the case of an emergency to reduce dependence on primary power sources;
- Medium Power Turbines: Turbines pushing out in the spectrum of 30 kW to 300 kW fall in this segment. However, they are mostly used to power up the homes in small localities. They are used along with other sources of renewable energy or other power storage devices;
- High Power Turbines: These refer to the systems where a large production of electricity is undertaken. These are incorporated in the large size wind farms that are associated to the power grids responsible for transporting the energy throughout cities.
2.3. Power Control
- A passive stall controller of WECS controls the input power of the wind by virtue of the aerodynamics of the blades and does not include sensors or actuators to stop the motion of the blades. In such WECS, the blades are fixed so that there is no relative motion with the hub, generally incorporating bolted or riveted connection. The design poses a stall when the wind flowing through the rotor exceeds a certain speed. This takes place since the first blade that comes in contact with the wind turns the flow into a turbulent one and the other blades continue to rotate within the wake of the first blade, thus significantly reducing the lift force experienced by those blades, stalling the turbine. Mostly used in fixed type fixed speed WECS, these are the cheapest and simpler designs than other types of WECS;
- An active stall control system is similar to the passive system; however, it uses sensors to predict the wind speeds and changes the pitch of the blades by means of motors or hydraulic actuators to interfere with the wind in a certain manner that induces a high turbulence and thus creating a stall. Active stall control systems are observed in high power turbines;
- Another type of WECS in this category uses similar mechanism as the active stall-controlled design, but the action is slightly different. Unlike the active stall controller, the pitch controller changes the pitch of the blades so that they don’t produce lift by reducing interaction with the flow of wind. This is different than the previous type which depended on increased turbulence, which still utilizes aerodynamics of the blade. This control system produces faster response times and thus, it is used extensively at present in the high-power turbine systems.
2.4. Rotational Speed Control Criteria
- Fixed Speed WECS: This type of turbine system composes the first generation of commercially set-up grid connected turbines. They are well proven over the ages and have reliable and simple construction. However, the simple nature of these turbines makes them operable only at a certain rated wind velocity, thus the name fixed-speed WECS. Winds at a faster velocity reduce the power coefficient (Cp) of the turbine. The Cp of a turbine is a unitless constant, particular to the design of the turbine. It is a ratio of power captured by the turbine and the available power in the wind due to the flow. The mathematical representation of the power coefficient is expressed in Equation (2) [28,32].
- b.
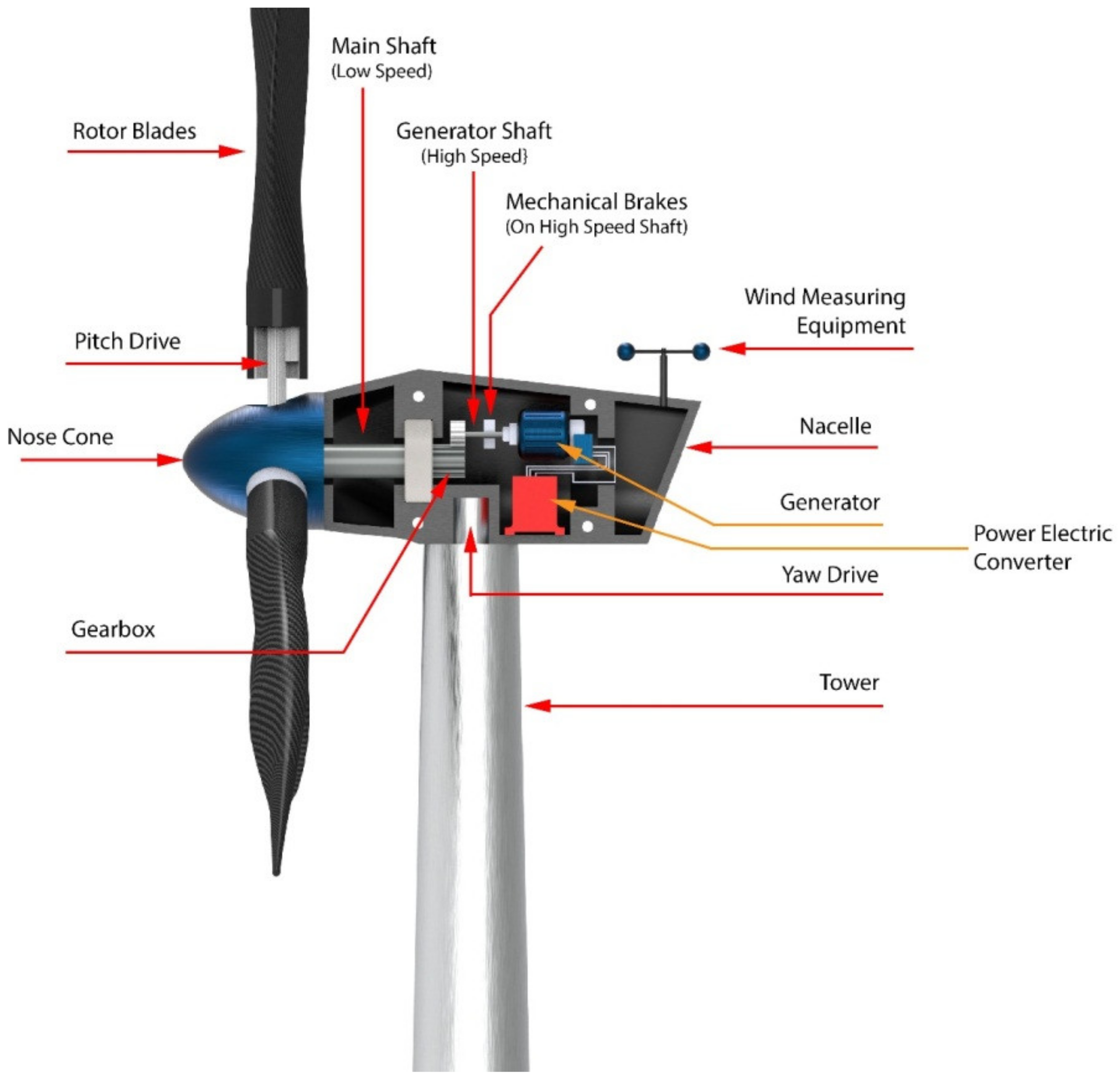
- Variable Speed WECS: The variable speed WECS were innovated from the older designs, that is the fixed speed WECS, considering the limitations of the latter, as utilization of wind power in power systems started to grow. Components of WECS are depicted in Figure 2 [33]. The limitations of the older designs were pronounced in places where the grids were not as strong to compensate for loss of power at higher speeds of wind. The development of power electronic convertors paved the way for large scale applications of the variable speed WECS. Power electronics are employed to make a connection between the turbines and the grid. The main advantage obtained by this system was that the rotor speed can be controlled according to the speed of wind. Thus, this system is able to maintain the optimum tip speed ratio by producing even and smooth power throughout the operational range. Since the optimum ‘λ’ is maintained, the system can thus maintain the designed value of Cp, which indicates maximum aerodynamic efficiency. It is a relatively complex and costly system, however the high yield of the system compensates for these shortcomings. Present wind energy systems use them on a large scale.
3. Components of WECS
3.1. Mechanical Components
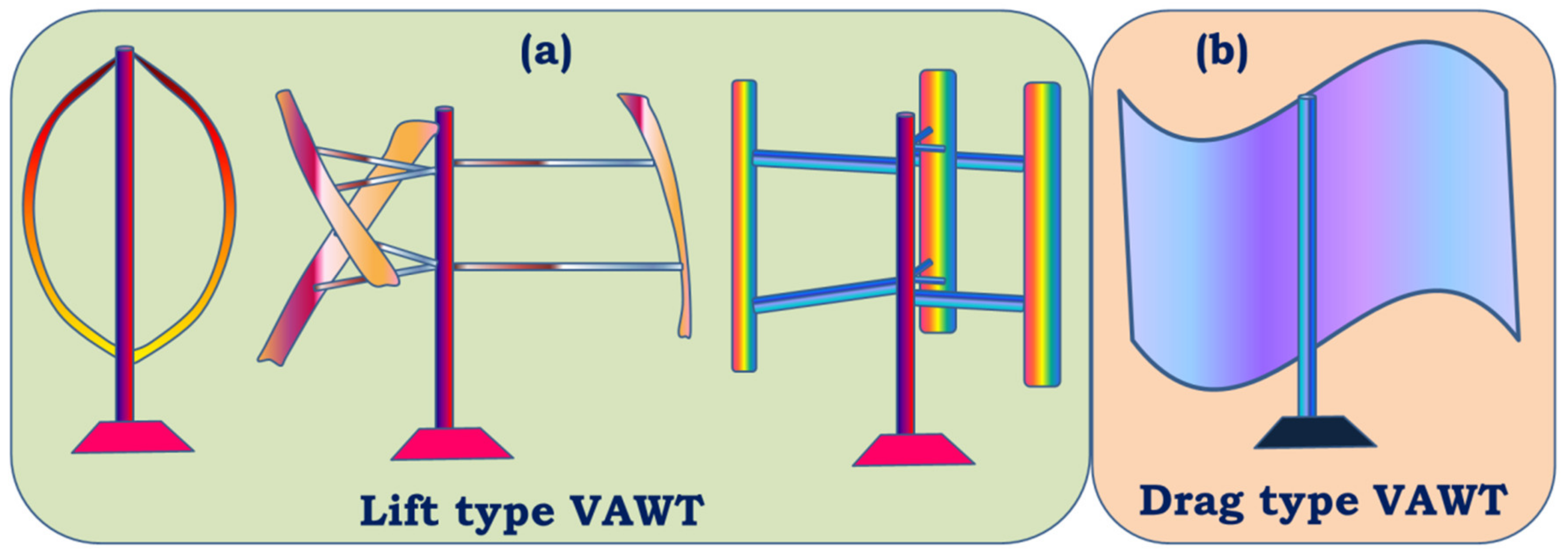
- Rotor: Rotor assembly is the aggregate of the barely distinctive elements that interact with the wind. The assembly consists of the blades, the hub and the nose cone. The blades are the aerodynamic devices responsible to initiate the drive. In HAWTs, they resemble the propeller of aeroplane, which operates on similar principle. The blade of a typical horizontal axis wind turbine generates lift, which turns the blade during wind flow in the axial direction. The same is not true for a vertical axis wind turbine, which can either be a lift type (which uses the lift forces generated by the moving air to produce the rotation of turbine blades, see Figure 3a) or a drag type (which uses the drag force of wind to produce the rotation motion of blades, see Figure 3b). A lift type vertical axis wind (VAW) is capable of having a higher aerodynamic coefficient, and thus are used more, however, they are mostly incapable of self-start since the torque produced is lower. Over the years, research is being conducted to find the ideal materials for production of the rotor blades. Initially, they were made from heavier metals, which were resistant to environmental conditions such as high turbulent wind, however were rendered not helpful since metals tend to have higher density and thus higher mass. Concentration of mass away from the center catered to a higher rotational moment of inertia, thus diminishing the acceleration of the rotor. With a higher mass concentration away from the center, the moment of inertia of the system gets high. As a result, the acceleration gets lower, which in turn results in less response to wind speed. A massive component would only begin to be affected by winds that can exert a minimum value of force, effectively increasing the cut-in speed. In addition, another downside would be the cut-out scenario, which would require more energy dissipation through braking to keep the rotation below a certain speed, in case of high wind speeds. This turned the focus towards composites that provide rigidity while not contributing to mass. The hub of the rotor facilitates mechanical support for the rotor assembly to stay upright while the latter is rotated. It houses the bearing to provide relative motion between the fixed support and the shaft. The nose cone is integrated with the hub, which primarily directs the wind interacting with the center of the rotor towards any of the three blades. Traditional rotor designs mandated a rigid connection between the hub and the blades. The modern designs have deviated from it to include a pitch control mechanism responsible for rotating the blades about its own axis to reduce lift and control the speed of the turbine [34].
- The Main Shaft: The main shaft is a solid extrude made from any of forged high carbon steel or cast iron/steel that attaches the gearbox to the rotor hub. At present, the megawatt size wind turbines rotate very slowly and the torque is high. Thus, the main shaft is also called low-speed shaft. For example in a 5 MW power turbine, the input shaft speed is about 12 rpm while the torque is in the range of 4000 kNm [35]. This torque value can be considered to be high from a structural point of view, as a torque transmission of 4000 kNm would require approximately a 9 m cross section of EN316 type steel.
- Gearbox: The main shaft rotates slowly at a very high torque. These rotational parameters are unusable by the generator, which require high speed low torque input. The gearbox is thus included between the main shaft and generator. Modern megawatt wind turbines operate on an overall torque reduction of 60 to 120 times [36]. Research, by Nejad et al., demonstrated the use of a gearbox with an overall gear ratio of 1:96.354 [35]. For such high reduction, multi-stage gearboxes are important where one or more stage incorporates a planetary gear system, since they are capable of huge gear ratios in a small assembly space. Since gearboxes are subjected to varying torques as the input shaft of the gearbox is bolted directly to the rotor hub, the gear train experiences high wear and tear.
- Mechanical Brakes: Brakes are safety equipment installed inside the housing for emergency situations for stopping the turbine during storms or high velocity winds. They are installed directly on to the low torque high-speed generator shaft for efficient braking, rather than on the high torque low speed main shaft. This keeps them from overheating and failing during emergencies by keeping the braking torque low. Modern high-power turbines are fitted with hydraulic or electromechanical actuated brakes (both disc and drum type brake mechanisms). Braking from maximum speed of the generator shaft can cause high wear of the latter and can also cause fire hazards due to increased temperatures. Hence, they are used after proper actuation of pitch and/or yaw drives, which reduce the initial speed of the rotor.
- Nacelle: It is the enclosure housing most of the mechanical components. In horizontal axis wind turbines, the nacelle is the structure mounted on the tower behind the rotor. The size and shape of the nacelle is influenced greatly by the design of the gearbox and reduction required. This fiberglass construction is constructed to reduce turbulence to enable less vibration through the structure. Manolesos et al. demonstrated the aerodynamic properties of generic wind turbine nacelle designs [37]. Vertical axis wind turbines feature transmission and gearbox assembly at the base of the tower, thus, neither an aerodynamic enclosure nor light weight construction is necessary.
- Pitch and Yaw Drives: Pitch of turbine blades refer to the rotational degree of freedom about the longitudinal axis of the blade and the yaw is the same for the top of the turbine (including the rotor and nacelle) with respect to the tower. With regard to pitch in the classification of WECS, as we have discussed, every turbine is rotated to function at a certain wind speed and produce a designed power. Since the power generation of a turbine depends on the energy captured from wind during higher velocity of operational winds, the blades are “pitched” to alter the value of aerodynamic efficiency Cp. Each blade is fitted with independent pitch control mechanism for this purpose. Likewise, the yaw drive is employed to align the turbine according to the direction of wind flow in order to obtain maximum efficiency. Discussion about control mechanisms and strategies would be covered further with greater details.
- Wind Measuring Equipment: As mentioned in regard to the pitch and yaw drives, the turbines operate on complex mechanisms, however the control of those mechanisms is ultimately managed by monitoring environmental conditions. Thus, turbines are further equipped with any kind of mechanical anemometer to measure the wind velocity around the system. An anemometer is a miniscule vertical axis turbine like arrangement with cupped struts, mounted on to the nacelle. Further, wind vanes are utilized in some wind turbines for judging the direction of flow, based on which of the controller signals the yaw drives to align itself to the wind.
3.2. Electrical Components
- Generator: A wind generator is an electromechanical component responsible for converting rotational motion into electrical power, thus converting rotational kinetic energy into electric potential. A typical AC generator works by moving a conductor loop in a static magnetic field based on the electromagnetic induction law of Faraday. Traditionally various types of generator have been in use with the introduction of a squirrel cage induction generator (SCIG) almost 35 years ago [28,36] along with a wound rotor induction generator (WRIG). Other generators being used are doubly fed induction generators (DFIG), permanent magnet synchronous generator (PMSG), and wound rotor synchronous generator (WRSG). The DFIG based WECSs have the stator present in the generator tied to the grid, while the rotor is linked to power converters [7]. Ideally, generators are optimized to produce power at the rated wind speed, above which control systems start operating to protect the systems from damage and brakes are applied on to the generator shaft [36]. Popular choices of generator amongst WECS are DC, AC Synchronous and AC Induction [36].
- Power Converter: The output electric parameters from the generator vary widely according to the wind speed. Thus, each turbine would produce different voltages and frequencies of current at a particular instant, which is not possible to be directly coupled to the grid without refining. A power converter thus acts as an interface for connecting the turbine to the grid. The power converter transforms the output voltage from AC to DC using a rectifier and again the rectified DC to AC, having a constant voltage and frequency in subsequent steps using inverter circuit [36,38].
- Step-up Transformer: The output from the generator in a grid connected MW turbine is rather low, in the range of 400 to 690 volts, which requires it to be stepped up since the grid connects directly to the high-tension lines [39]. The necessity of a step-up transformer can be annihilated by designing the generator and power electronic converter according to the wind farm collection point voltage, however it demands additional costs for medium voltage generator and power converter setup, diminishing the economic benefits of removing a step-up transformer from the circuit [40]. However, studies are being conducted in recent years to eliminate the needs of transformers in medium voltage grids in order to reduce transmission losses incurred from stepping up the voltages required for transmission [39,41].
- Wind Farm Collection Points or Point of Common Coupling: The point of common coupling (PCC) is a connecting ground of all the turbines of a wind farm. The preferred mode of connection in the wind farms is a parallel connection, which facilitates either maintaining a desired potential difference or having a defined node for connecting more turbines if necessary [41].

4. Flow of Power in a WECS
- The turbine has no hub and has an infinite number of blades with no drag from any of the blades (ideally zero drag);
- The flow is non-compressible, that is, the density of the air remains constant throughout;
- Thrust experienced by the rotor is uniform throughout.
5. Control Strategies Employed in WECS
- Control in Level 1: Transmission system and distribution system operator (TSO/DSO) controls
- Control in Level 2: Wind farm centralized control
- Control in Level 3: Wind turbine centralized control
- Pitch control
- Yaw control
- Reactive power generation (RPG)
- Fault ride-through (FRT)
- Damping control
- Ancillary services
- Integration and synchronization of grid
- MPPT control
- Speed, torque and power control of generator
- Voltage oriented control of grid
- Current control of generator
- DC chopper control
- Current control of grid
- Optimal TSR (OTSR) Control: The maximum peak point tracking as discussed previously, utilizes algorithms to estimate reference operational speed () for the prevalent wind speed () considering other physical parameters of the turbine such as pitch angle, as well as feedback signals for required power factor. The is tuned based on the wind velocity, such that the optimum tip speed ratio () can be churned. The adjustment of the speed is done based on the expression as given in Equation (16):where, is the angular velocity of the rotor; is the gear ratio employed in the gearbox and is the radius of the rotor, in compliance with Equation (1). The control levels 1 and 2 operate on feedback from the generator. The feedback from generator is a function of the rotational speed of the generator. The control level checks for the error between the obtained value and the reference velocity for every instant and attempts to minimize this error. As this control technique does not involve memory, since the data are processed and compared in every instant, the complexity of the system is lowered. This MPPT control strategy is widely in use in WECS industry, being the simplest among all MPPT control strategies [50,51]. However, proper measurement of wind speed is an important criterion, which demands the use of expensive equipment. Ultrasonic sensors are promising in this regard due to their ability to furnish reliable and accurate wind information.
- Turbine Power Curve (TPC) based Control: Similar to the previous control method, MPPT strategy utilizes the wind speed for controlling the turbine speed. In this process, the power produced based on wind speed curve is referenced to the power curve provided by the manufacturer of the wind turbine, which is initially tested in controlled wind speeds, which provides the output power curve. Each wind speed and corresponding power, output is stored in a memory space. During operation at a particular wind speed, the power produced by the generator can be compared with the data point at a same wind speed from memory. Here, the output signal from the generator is in terms of instantaneous voltage, and current, . Power is obtained as . The control levels 1 and 2 attempt to reduce the error between the power values and by response signals, which closely resemble the ones used in “optimal tip speed ratio control” [52].
- Optimal Torque (OT) Control: The previous methods rely completely on the speed of wind to govern the control of the operational parameters. Therefore, even with the implementation of expensive wind speed measurement equipment, the input information is still incomplete. Thus, for increased reliability, other MPPT control techniques also utilize the rotational speed of the generator rotor. In this, the speed of the generator is used to calculate the reference electromagnetic torque .
- d.
- Power Signal Feedback (PSF) Control: Another MPPT control utilizes the input signal in the form of generator speed. This follows the basic principles of Power Curve based control strategy, however instead of monitoring the wind speed, sensors are employed to monitor the speed of the generator. The Equation (16) signifies that the ωm of a generator is directly proportional to the vw. Therefore, similar to the power curve used in the wind turbine power curve–based control, this strategy utilizes power versus wind velocity curve to compute the reference power, . The control system utilizes a fuzzy logic–based controller that has two inputs, namely, the rotor speed from the generator and the generated power. The estimated output power can be generated corresponding to the conditions. If the input power to the controller is lower than the estimated maximum value, the generator is controlled accordingly to reach more velocity allowing more power to be elicited from the wind [53].
- e.
- Speed Sensor-less (SSL) Control: This MPPT control operates without the use of any kind of speed sensing device. Rather, the wind speed is predicted by autoregressive statistical models of WECSs, which are based on the measured frequency (fa) of the generator. The predictions implemented regarding the wind speed category based on the basis of time scales are [54]:
- Ultra-short-term forecast: These predictions are regarded for wind conditions about an hour ahead.
- Short-term forecast: This is applicable for forecasts several hours ahead.
- Medium-term forecast: The prediction of wind conditions in the time span from a few hours to about a week.
- Long-term forecast: Used for detecting wind conditions more than a week ahead.
- f.
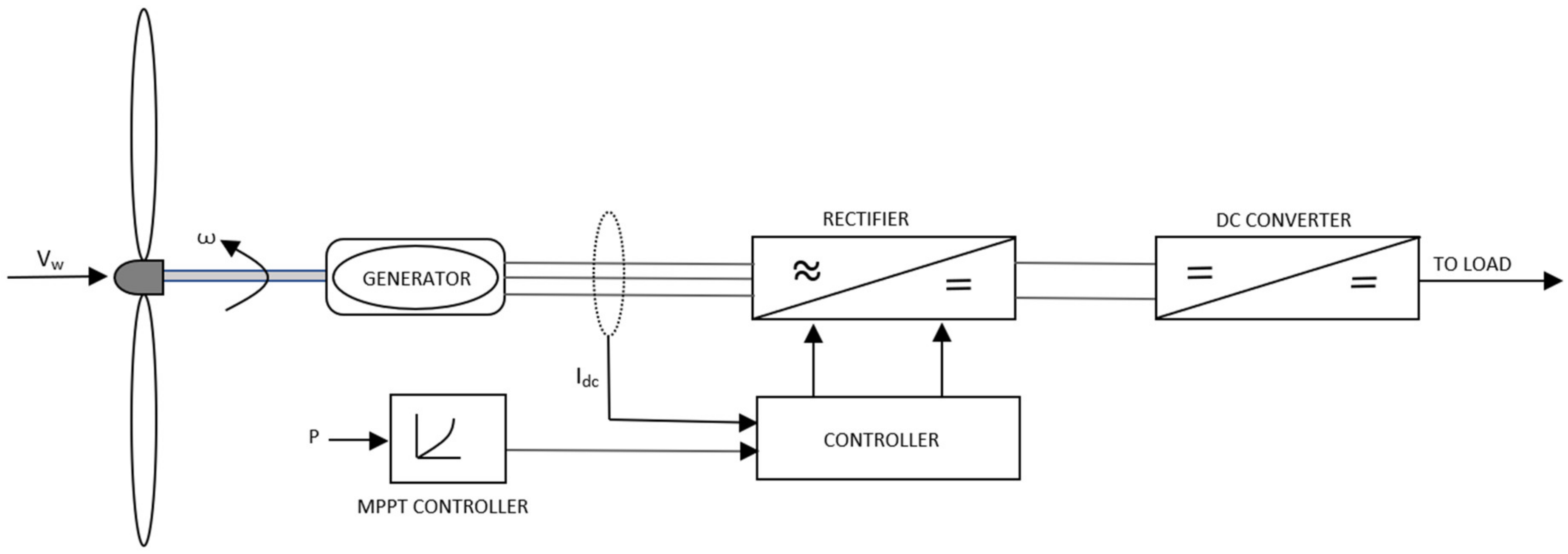
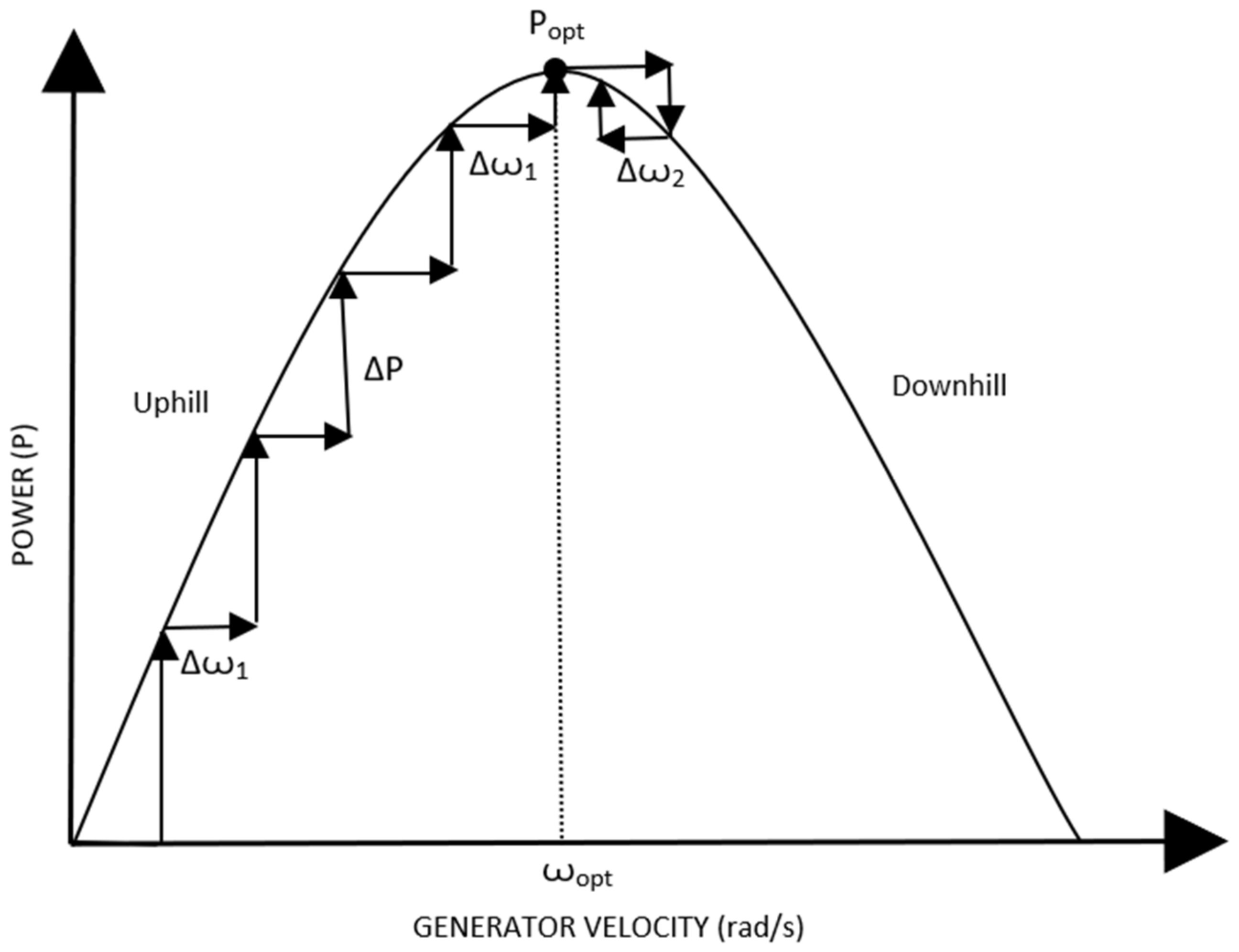
- Hill Climb Search (HCS) Control: It is a method of maximum peak point tracking control strategy that involves a disturbance in the reference signal. The inputs in this control are obtained in the form of generator speed and dc-link current. The output is a command signal that is needed for extraction of maximum/peak power. A schematic of the hill climb search control is depicted in Figure 5 [53]. As the generator speed increases, the output power is seen to increase while approaching the peak output power, as illustrated in Figure 6 [53]. After the peak power is encountered, an increase in rotor speed tends to decrease the power output. The mechanical power being generated is compared to the maximum extractable power in this method, after which it is decided whether or not it is necessary to increase the generator speed. The speed of the generator is altered by changing the dc-link’s current value. Once the WECS control starts, the controller perturbs for every instant by tracking maximum points with every instance of the operating parameters being changed.
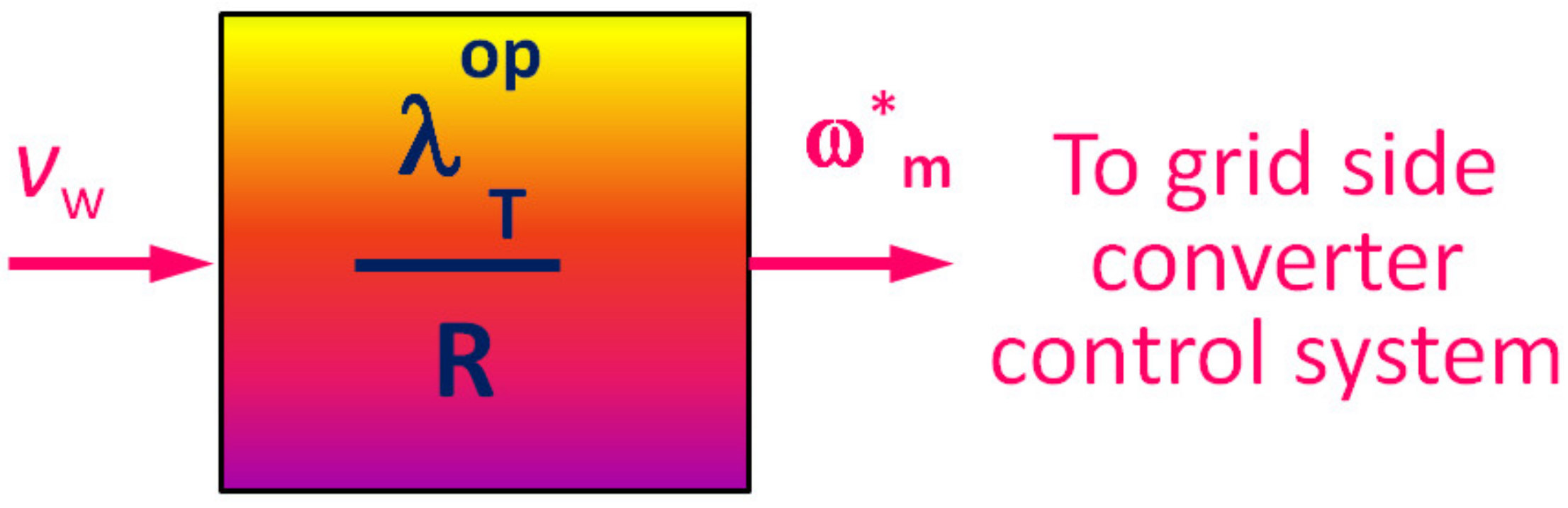
- Tip Speed Ratio (TSR) Control: Not unlike the optimal TSR control strategy used in case of a DFIG based WECS, the optimal TSR (OTSR) is evaluated with the velocity of wind, vw as an input parameter. A schematic flow of TSR control is depicted in Figure 7. With the knowledge of the tip speed ratio to be maintained for the given wind speed, the optimal speed of the turbine is to be evaluated by the known relation given by Equation (22) [28,53]:where, R is the turbine rotor radius. This speed control command is used further to the control loop responsible for controlling the speed. The PI controller is responsible for processing the command and to limit the speed of the turbine rotor to the desired maximum/peak value of rotor speed obtained by the evaluation.
- Power Signal Feedback (PSF) Control: The power signal feedback system of control utilizes the information about the rotor speed as input of the controller and power produced as a feedback, directly from the generator. In this system of control, the reference power is evaluated through the algorithm, which is then compared to the produced value of power obtained through feedback loop.
6. Present Trends in the Field of WECS and Scopes of Improvement
6.1. On-Going Trends
- battery;
- flow battery (FB);
- fuel cell (FC);
- flywheel (FW);
- superconducting magnetic energy storage (SMES);
- supercapacitor (SC);
- compressed air energy storage (CAES);
- pumped hydroelectric energy storage (PHES);
- water storage.
- Advanced lead-acid battery: Regular lead–acid batteries have been a staple for a variety of applications in every corner of industry, as well as in an automotive and domestic context. Though, most prominent and specific applications include frequency regulation, bulk storage of energy in case of integration of variable renewable energy sources and distributed energy storage systems. As a result of versatile and vast usage of the Pb–acid batteries, these have been an interesting focus for further enhancements. A conventional Pb–acid battery comprises lead–dioxide (PbO2) as cathode and lead (Pb) as anode. During the discharge process, chemical reactions in the cell lead to the synthesis of lead sulfate, whereas, during charging, this reaction reverses and Pb gets deposited back onto the electrodes. Recent developments have demonstrated that introducing carbon into the cell can help with the prevention of detrimental crystallization during charging and discharging cycles [56]. The implication of this is an increase in the life-span of the batteries, besides an increase in life-cycle between consecutive charging.
- Sodium-sulfur battery: The core of this battery technology houses molten sodium in an ionic state, which is lined with alumina (or aluminum oxide) on all sides. This is placed inside a sodium sulfate surrounding. The advantage of sodium sulphur battery is a high energy density, making it suitable for places of application that demand short yet potent bursts of energy. These batteries are used in rather functional contexts in energy distribution grid applications, wind power integration, in ancillary services as UPS batteries and much more.
- Lithium ion battery: As the name points out, these batteries incorporate positively charged lithium ions (as metal), that flow through electrolyte and promotes flow of electrons across the connected outer circuit. From time to time, lithium ion batteries have found a place in almost all electronic applications, alongside medical uses, owing to the far superior energy density values. At present, lithium ion batteries are being tried and tested for application in automotive industries, prompting its upcoming uses in fields of renewable energy industry [56]. Current developments are focused on improving the charging and discharging cycle efficiency of these batteries.
- Flow batteries: A flow battery technology stores energy by the virtue of chemical energy in the form of two electrolyte reservoirs inside the body of the battery. The chemical energy is converted into electrical energy when one liquid is displaced slowly and steadily from one tank to another. The displacement of the liquid when reversed acts to charge the batteries. Since they are the function of the fluid motion, they are termed as flow batteries. The energy storing capacity of these batteries is solely governed by the size of the tanks and the energy density is dependent on the volume flow rate from anode to cathode. The primary advantage, for which they are considered as a potential candidate for evolving battery technologies, comes from the fact that these batteries can have very high-power ratings, and the electrolytes can be stored and replaced easily, more conveniently than typical cell electrolytes, coupled with adjustable and replaceable flow properties according to the application.
6.2. Future Prospects
- Technologies based on supply and conversion of wind energy;
- A technical overhaul, with new fundamentals, which cannot be a result of incremental research on prevalent technologies; and
- A technology which is in its early developmental stages.
6.2.1. Airborne Wind Energy (AWE)
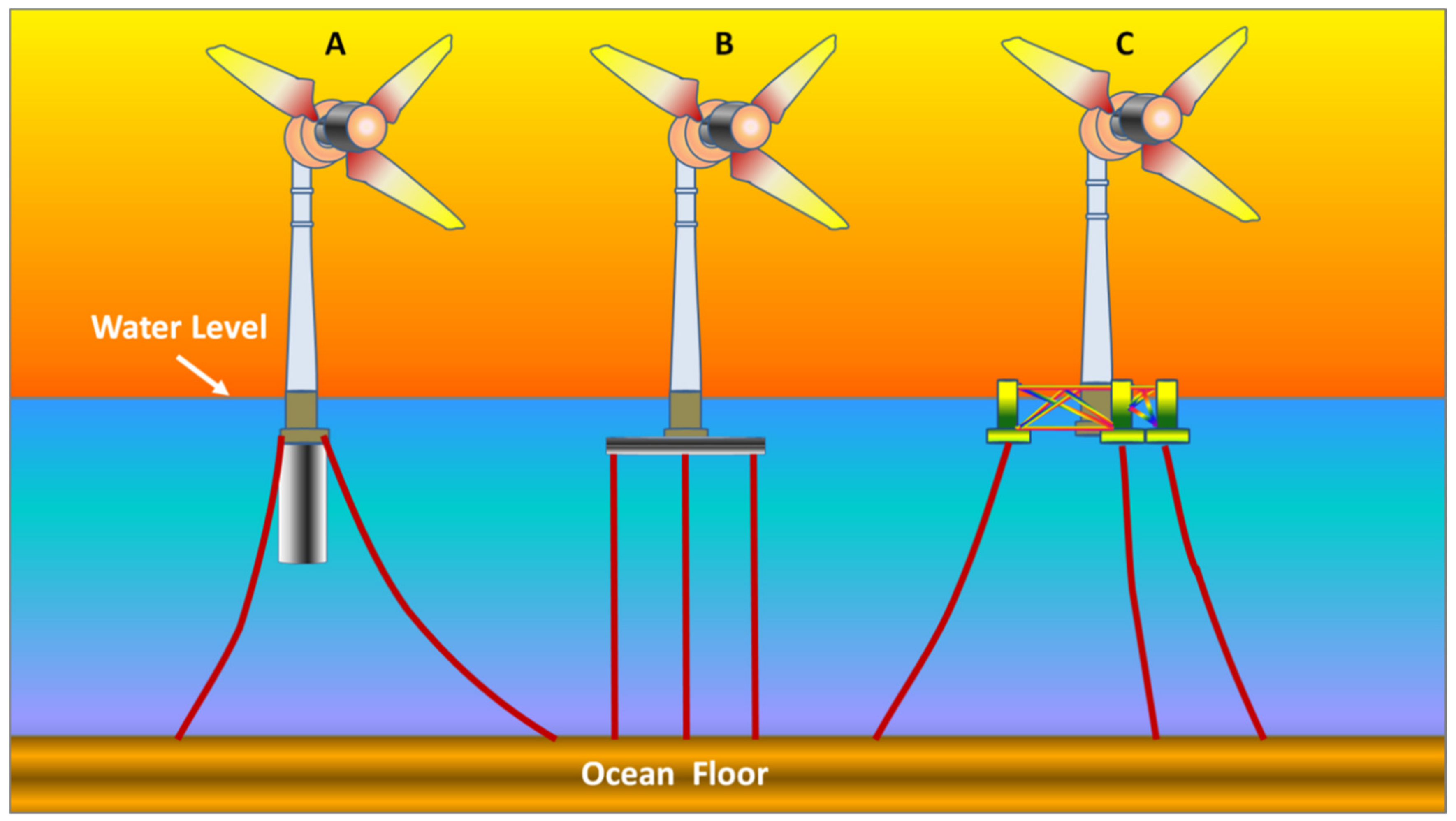
6.2.2. Offshore Floating Wind Concepts

6.2.3. Tip-Rotor Wind Turbine (TRWT)
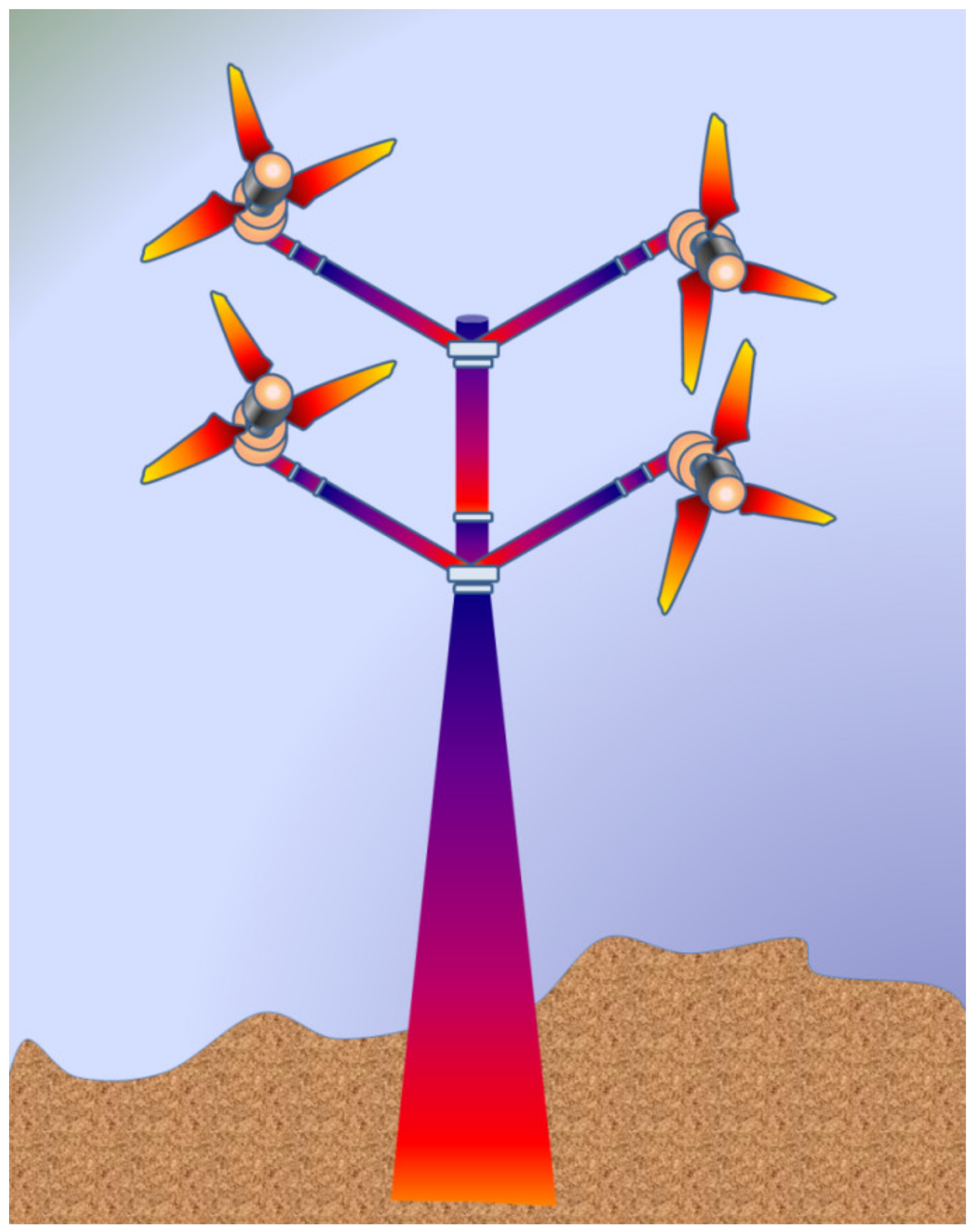
6.2.4. Multi-Rotor Wind Turbine (MRWT)
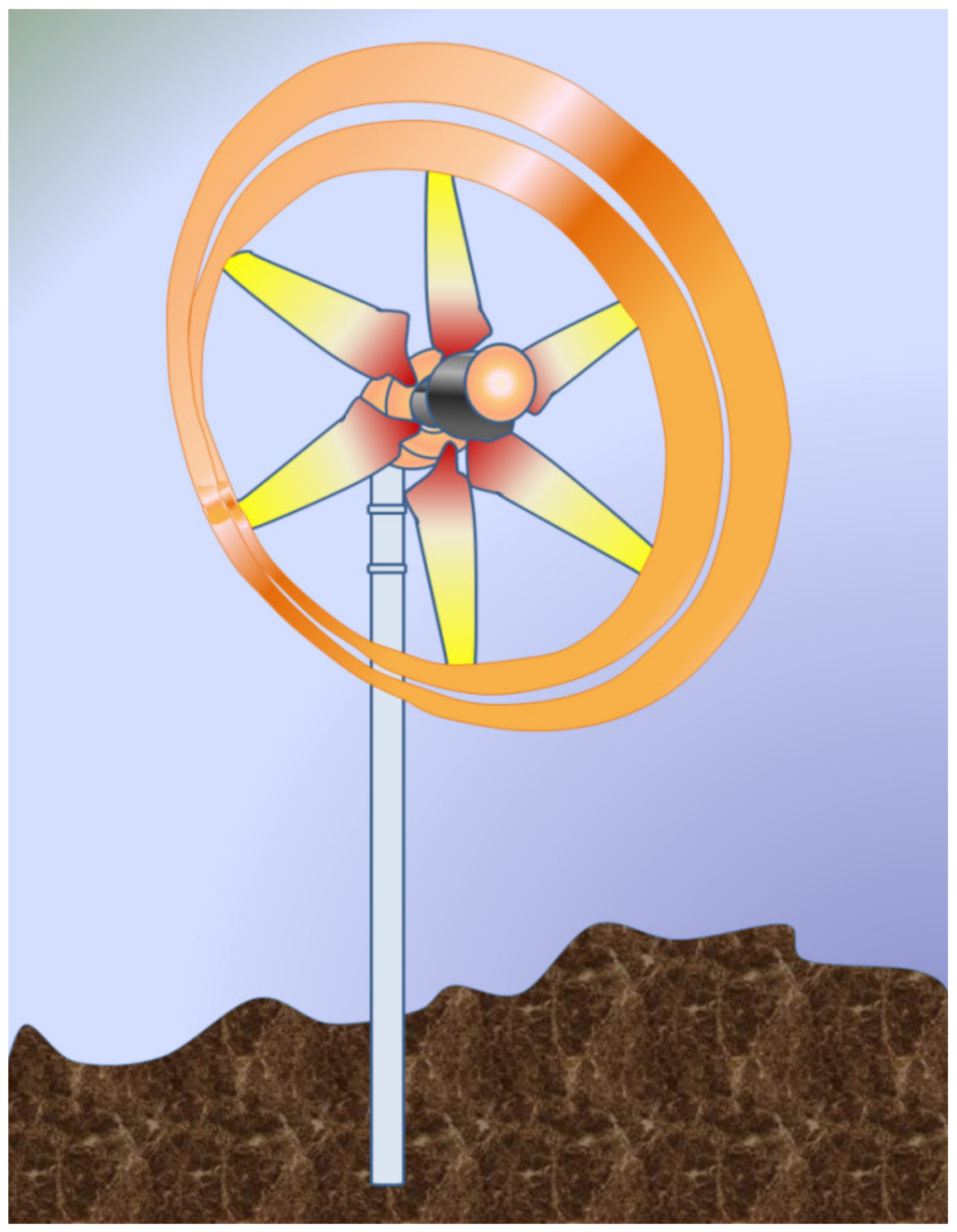
6.2.5. Diffuser Augmented Wind Turbine (DAWT)
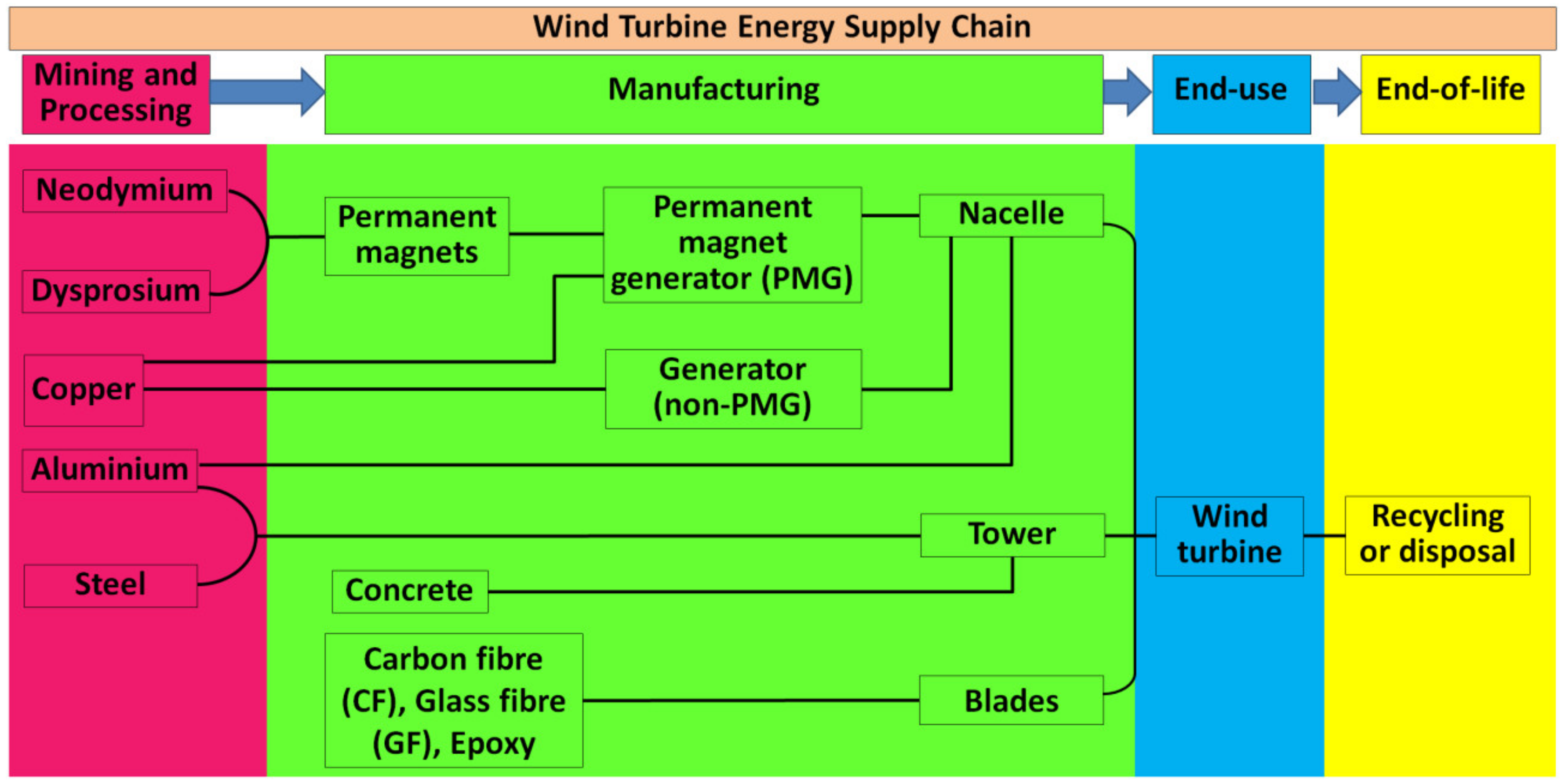
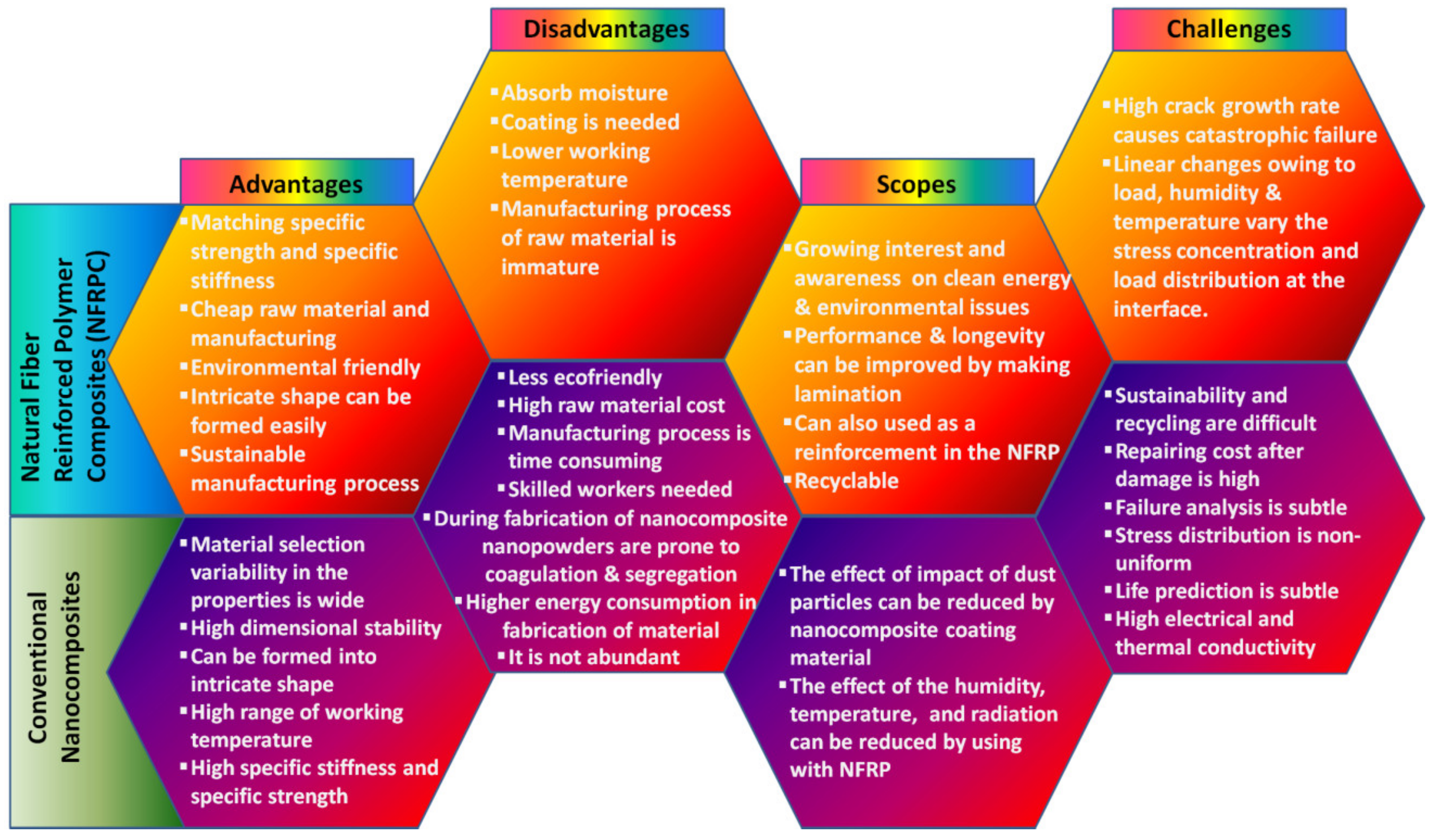
7. Material Aspects
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Speirs, J.; McGlade, C.; Slade, R. Uncertainty in the availability of natural resources: Fossil fuels, critical metals and biomass. Energy Policy 2015, 87, 654–664. [Google Scholar] [CrossRef] [Green Version]
- Sukhatme, S.P.; Nayak, J. Solar Energy; McGraw-Hill Education: New York, NY, USA, 2017. [Google Scholar]
- Herbert, G.J.; Iniyan, S.; Sreevalsan, E.; Rajapandian, S. A review of wind energy technologies. Renew. Sustain. Energy Rev. 2007, 11, 1117–1145. [Google Scholar] [CrossRef]
- Balat, M.; Balat, H. Biogas as a renewable energy source—A review. Energy Sources Part A 2009, 31, 1280–1293. [Google Scholar] [CrossRef]
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Blunden, L.; Bahaj, A. Tidal energy resource assessment for tidal stream generators. Proc. Inst. Mech. Eng. Part A J. Power Energy 2007, 221, 137–146. [Google Scholar] [CrossRef]
- Delyannis, E. Historic background of desalination and renewable energies. Sol. Energy 2003, 75, 357–366. [Google Scholar] [CrossRef]
- Redlinger, R.; Andersen, P.; Morthorst, P. Wind Energy in the 21st Century: Economics, Policy, Technology and the Changing Electricity Industry; Springer: New York, NY, USA, 2016. [Google Scholar]
- Ajao, K.R.; Mahamood, M.R. Wind energy conversion system: The past, the present and the prospect. J. Am. Sci. 2009, 5, 17–22. [Google Scholar]
- Ellabban, O.; Abu-Rub, H.; Blaabjerg, F. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Kumar, R.; Ganesh, A.; Kumar, V. Raising concerns on high PV penetration and ancillary services: A review. In Proceedings of the International Conference on Intelligent Computing and Smart Communication, Ostrava, Czech Republic, 21–22 March 2019; Springer: Singapore, 2020; pp. 1347–1364. [Google Scholar]
- Pedraza, J.M. The current situation and perspectives on the use of solar energy for electricity generation. In Electrical Energy Generation in Europe; Springer: Cham, Switzerland, 2015; pp. 169–219. [Google Scholar] [CrossRef]
- Ahmadi, G. Some preliminary results on the performance of a small vertical-axis cylindrical wind turbine. Wind Eng. 1978, 2, 65–74. [Google Scholar]
- Hepbasli, A.; Ozgener, O. A review on the development of wind energy in Turkey. Renew. Sustain. Energy Rev. 2004, 8, 257–276. [Google Scholar] [CrossRef]
- Jaber, J.O.; Badran, O.O.; Abu-Shikhah, N. Sustainable energy and environmental impact: Role of renewables as clean and secure source of energy for the 21st century in Jordan. Clean Technol. Environ. Policy 2004, 6, 174–186. [Google Scholar] [CrossRef]
- Howey, D.A.; Bansal, A.; Holmes, A.S. Design and performance of a centimetre-scale shrouded wind turbine for energy harvesting. Smart Mater. Struct. 2011, 20, 085021. [Google Scholar] [CrossRef] [Green Version]
- Shah, L.; Cruden, A.; Williams, B.W. A variable speed magnetic gear box using contra-rotating input shafts. IEEE Trans. Magn. 2010, 47, 431–438. [Google Scholar] [CrossRef]
- Price, T.J. James Blyth—Britain’s first modern wind power pioneer. Wing. Eng. 2005, 29, 191–200. [Google Scholar] [CrossRef]
- Horizontal Axis Wind Turbine. Available online: https://www.secret-bases.co.uk/wiki/Horizontal_axis_wind_turbine (accessed on 1 December 2021).
- Brunt, A.; Spooner, D. The development of wind power in Denmark and the UK. Energy Environ. 1998, 9, 279–296. [Google Scholar] [CrossRef]
- Nelson, V.; Starcher, K. Wind Energy: Renewable Energy and the Environment; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Hand, B.; Cashman, A. A review on the historical development of the lift-type vertical axis wind turbine: From onshore to offshore floating application. Sustain. Energy Technol. Assess. 2020, 38, 100646. [Google Scholar] [CrossRef]
- Sharifian, M. The Paths of Clean Technology: From Innovation to Commercialization. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2015. [Google Scholar]
- Von Gersdorff, K. Transfer of German aeronautical knowledge after 1945. In Aeronautical Research in Germany; Springer: Berlin/Heidelberg, Germany, 2004; pp. 325–344. [Google Scholar] [CrossRef]
- Wang, W.; Caro, S.; Bennis, F.; Mejia, O.R.S. A simplified morphing blade for horizontal axis wind turbines. J. Sol. Energy Eng. 2014, 136, 011018. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, K.H. Technological trajectories in the making: Two case studies from the contemporary history of wind power. Centaurus 2010, 52, 175–205. [Google Scholar] [CrossRef]
- Jaen-Sola, P.; McDonald, A.S.; Oterkus, E. Lightweight design of direct-drive wind turbine electrical generators: A comparison between steel and composite material structures. Ocean Eng. 2019, 181, 330–341. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B. Model Predictive Control of Wind Energy Conversion Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Shkara, Y.; Cardaun, M.; Schelenz, R.; Jacobs, G. Aeroelastic response of a multi-megawatt upwind horizontal axis wind turbine (HAWT) based on fluid–structure interaction simulation. Wind Energy Sci. 2020, 5, 141–154. [Google Scholar] [CrossRef] [Green Version]
- Didane, D.H.; Maksud, S.M.; Zulkafli, M.F.; Rosly, N.; Shamsudin, S.S.; Khalid, A. Performance investigation of a small Savonius-Darrius counter-rotating vertical-axis wind turbine. Int. J. Energy Res. 2020, 44, 9309–9316. [Google Scholar] [CrossRef]
- Yao, J.; Liao, Y. Analysis on the operations of an AC excited wind energy conversion system with crowbar protection. Autom. Electr. Power Syst. 2007, 31, 79–83. [Google Scholar]
- Buehring, I.; Freris, L. Control policies for wind-energy conversion systems. IEE Proc. C Gener. Transm. Distrib. 1981, 128, 253–261. [Google Scholar] [CrossRef]
- Chang, L. Wind energy conversion systems. IEEE Can. Rev. 2002, 12–16. [Google Scholar]
- Schubel, P.J.; Crossley, R.J. Wind turbine blade design. Energies 2012, 5, 3425–3449. [Google Scholar] [CrossRef] [Green Version]
- Nejad, A.R.; Jiang, Z.; Gao, Z.; Moan, T. Drivetrain load effects in a 5-MW bottom-fixed wind turbine under blade-pitch fault condition and emergency shutdown. J. Phys. Conf. Ser. 2016, 753, 112011. [Google Scholar] [CrossRef]
- Salameh, J.P.; Cauet, S.; Etien, E.; Sakout, A.; Rambault, L. Gearbox condition monitoring in wind turbines: A review. Mech. Syst. Signal Process. 2018, 111, 251–264. [Google Scholar] [CrossRef]
- Manolesos, M.; Chaviaropoulos, P. Wind tunnel study of a generic wind turbine nacelle model. In Turbo Expo: Power for Land, Sea, and Air, Proceedings of the Turbomachinery Technical Conference and Exposition, Charlotte, NC, USA, 26–30 June 2017; American Society of Mechanical Engineers: New York, NY, USA, 2017; p. V009T49A003. [Google Scholar]
- Blaabjerg, F.; Chen, Z.; Teodorescu, R.; Iov, F. Power electronics in wind turbine systems. In Proceedings of the 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; pp. 1–11. [Google Scholar]
- Abbasi, M.; Lam, J. A step-up transformerless, ZV–ZCS high-gain DC/DC converter with output voltage regulation using modular step-up resonant cells for DC grid in wind systems. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1102–1121. [Google Scholar] [CrossRef]
- Jose, G.; Chacko, R. A review on wind turbine transformers. In Proceedings of the 2014 Annual International Conference on Emerging Research Areas: Magnetics, Machines and Drives (AICERA/iCMMD), Kottayam, India, 24–26 July 2014; pp. 1–7. [Google Scholar]
- Islam, M.R.; Guo, Y.; Zhu, J. Multilevel converters for step-up-transformer-less direct integration of renewable generation units with medium voltage smart microgrids. In Large Scale Renewable Power Generation; Springer: Singapore, 2014; pp. 127–149. [Google Scholar] [CrossRef]
- Ragheb, M.; Ragheb, A.M. Wind Turbines Theory—The Betz Equation and Optimal Rotor Tip Speed Ratio. In Fundamental and Advanced Topics in Wind Power; IntechOpen: London, UK, 2011. [Google Scholar] [CrossRef] [Green Version]
- Huleihil, M.; Mazor, G. Wind turbine power: The betz limit and beyond. In Advances in Wind Power; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef] [Green Version]
- Ragheb, M.; Ragheb, A.M. Wind turbines theory-the betz equation and optimal rotor tip speed ratio. Fundam. Adv. Top. Wind Power 2011, 1, 19–38. [Google Scholar]
- Whitaker, S. Newton’s laws, Euler’s laws and the speed of light. Chem. Eng. Educ. 2009, 43, 96–103. [Google Scholar]
- Ranjbar, M.H.; Nasrazadani, S.A.; Kia, H.Z.; Gharali, K. Reaching the betz limit experimentally and numerically. Energy Equip. Syst. 2019, 7, 271–278. [Google Scholar]
- Burton, T.; Sharpe, D.; Jenkins, N. Handbook of Wind Energy; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Nguyen, H.M.; Naidu, D.S. Advanced control strategies for wind energy systems: An overview. In Proceedings of the 2011 IEEE/PES Power Systems Conference and Exposition, Phoenix, AZ, USA, 20–23 March 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodríguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Song, D.; Yang, J.; Su, M.; Liu, A.; Liu, Y.; Joo, Y.H. A Comparison study between two MPPT control methods for a large variable-speed wind turbine under different wind speed characteristics. Energies 2017, 10, 613. [Google Scholar] [CrossRef] [Green Version]
- Ananth, D.; Kumar, G.V.N. Tip speed ratio based MPPT algorithm and improved field oriented control for extracting optimal real power and independent reactive power control for grid connected doubly fed induction generator. Int. J. Electr. Comput. Eng. 2016, 6, 1319. [Google Scholar]
- Blaabjerg, F.; Iov, F.; Chen, Z.; Ma, K. Power electronics and controls for wind turbine systems. In Proceedings of the 2010 IEEE International Energy Conference, Manama, Bahrein, 18–22 December 2010; pp. 333–344. [Google Scholar]
- Thongam, J.S.; Ouhrouche, M. MPPT control methods in wind energy conversion systems. Fundam. Adv. Top. Wind Power 2011, 15, 339–360. [Google Scholar]
- Barbosa de Alencar, D.; De Mattos Affonso, C.; Limão de Oliveira, R.C.; Moya Rodríguez, J.L.; Leite, J.C.; Reston Filho, J.C. Different models for forecasting wind power generation: Case study. Energies 2017, 10, 1976. [Google Scholar] [CrossRef] [Green Version]
- Phan, T.; Nguyen, V.; Hossain, M.; To, A.; Tran, H.; Phan, T. Transient responses of the doubly-fed induction generator wind turbine under grid fault conditions. In Proceedings of the 2016 International Conference on Advanced Computing and Applications (ACOMP), Can Tho, Vietnam, 23–25 November 2016; pp. 97–104. [Google Scholar]
- Islam, M.R.; Mekhilef, S.; Saidur, R. Progress and recent trends of wind energy technology. Renew. Sustain. Energy Rev. 2013, 21, 456–468. [Google Scholar] [CrossRef]
- Dalala, Z.M.; Zahid, Z.U.; Lai, J.-S. New overall control strategy for small-scale WECS in MPPT and stall regions with mode transfer control. IEEE Trans. Energy Convers. 2013, 28, 1082–1092. [Google Scholar] [CrossRef]
- Price, T.J. UK Large-scale wind power programme from 1970 to 1990: The Carmarthen Bay experiments and the musgrove vertical-axis turbines. Wind Eng. 2006, 30, 225–242. [Google Scholar] [CrossRef] [Green Version]
- Biswal, G.; Shukla, S. Recent trends in wind power generation: Indian scenario. Int. J. Adv. Eng. Technol. 2014, V, 37–41. [Google Scholar]
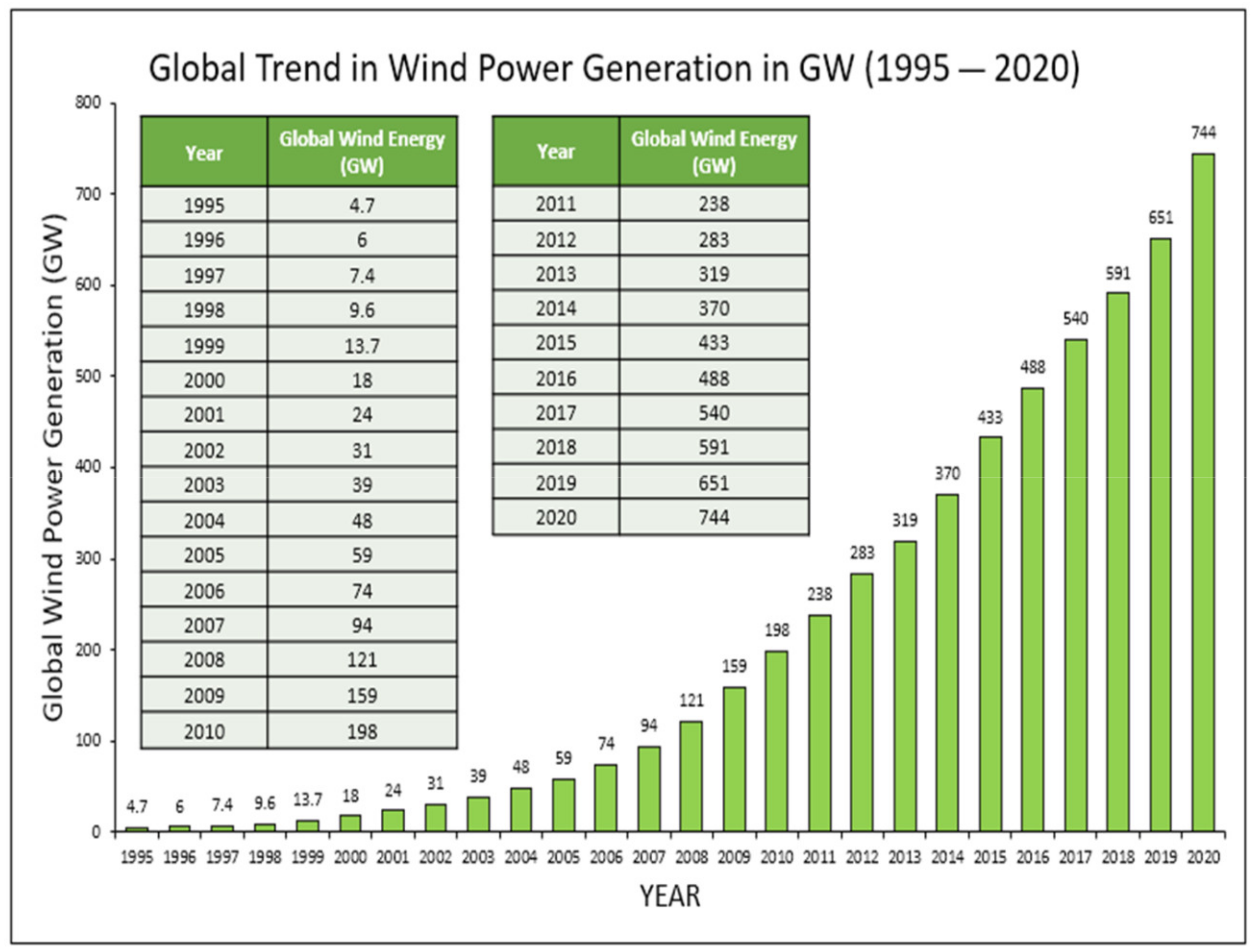
- World Wind Energy Association. Worldwide Wind Capacity Reaches 744 Gigawatts—An Unprecedented 93 Gigawatts Added in 2020; Press Release, Statistics; WWEA: Bonn, Germany, 2021. [Google Scholar]
- Riegler, H. HAWT versus VAWT: Small VAWTs find a clear niche. Refocus 2003, 4, 44–46. [Google Scholar]
- Kjellin, J.; Bülow, F.; Eriksson, S.; Deglaire, P.; Leijon, M.; Bernhoff, H. Power coefficient measurement on a 12 kW straight bladed vertical axis wind turbine. Renew. Energy 2011, 36, 3050–3053. [Google Scholar] [CrossRef]
- Islam, M.; Ting, D.S.-K.; Fartaj, A. Aerodynamic models for Darrieus-type straight-bladed vertical axis wind turbines. Renew. Sustain. Energy Rev. 2008, 12, 1087–1109. [Google Scholar] [CrossRef]
- Wahl, M. Designing an H-Rotor Type Wind Turbine for Operation on Amundsen-Scott South Pole Station. Master’s Thesis, Uppsala University, Uppsala, Sweden, 2007. [Google Scholar]
- Abdelhameed, E.H.; Hassan, H.A. Adaptive maximum power tracking control technique for wind energy conversion systems. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Nasr City, Egypt, 18–20 December 2018; pp. 146–151. [Google Scholar]
- Hlaing, S. Basic concepts of doubly fed induction generator driven by wind energy conversion system. Int. J. Sci. Eng. Technol. Res. 2014, 3, 3242–3246. [Google Scholar]
- Zohra, A.F.; Khalil, B.I.; Slimane, L.; Youcef, S.; Benyounes, M. Artificial intelligence control applied in wind energy conversion system. Int. J. Power Electr. Drive Syst. 2018, 9, 571. [Google Scholar]
- Jabir, M.; Illias, H.A.; Raza, S.; Mokhlis, H. Intermittent smoothing approaches for wind power output: A review. Energies 2017, 10, 1572. [Google Scholar] [CrossRef] [Green Version]
- Ding, K.; Zhi, J. Wind Power Peak-Valley Regulation and Frequency Control Technology; Elsevier: Amsterdam, The Netherlands, 2016; pp. 211–232. [Google Scholar]
- Rehman, S.; Al-Hadhrami, L.M.; Alam, M.M. Pumped hydro energy storage system: A technological review. Renew. Sustain. Energy Rev. 2015, 44, 586–598. [Google Scholar] [CrossRef]
- Rathore, N.; Yettou, F.; Gama, A. Improvement in wind energy sector using nanotechnology. In Proceedings of the 2020 6th International Symposium on New and Renewable Energy (SIENR), Ghardaia, Algeria, 13–14 October 2021; pp. 1–5. [Google Scholar]
- Ahmed, M.; Khan, W.A. Improving Wind Turbine Performance Using Nano Materials, pp. 1–5. Available online: https://superior.edu.pk/wp-content/uploads/2017/04/13.pdf (accessed on 1 December 2021).
- Buyuknalcaci, F.; Polat, Y.; Negawo, T.; Döner, E.; Alam, M.; Hamouda, T.; Kilic, A. Carbon nanotube-based nanocomposites for wind turbine applications. In Polymer-Based Nanocomposites for Energy and Environmental Applications; Elsevier: Amsterdam, The Netherlands, 2018; pp. 635–661. [Google Scholar]
- Laturkar, S.; Mahanwar, P. Superhydrophobic coatings using nanomaterials for anti-frost applications—Review. Nanosyst. Phys. Chem. Math. 2016, 7, 650–656. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Xu, M.; Wang, L.; Tao, H.; Su, Y.; Gao, D.; Lan, L.; Zou, J.; Peng, J. Very-high color rendering index hybrid white organic light-emitting diodes with double emitting nanolayers. Nano-Micro Lett. 2014, 6, 335–339. [Google Scholar] [CrossRef] [Green Version]
- Bonu, V.; Jeevitha, M.; Kumar, V.P.; Srinivas, G.; Siju; Barshilia, H.C. Solid particle erosion and corrosion resistance performance of nanolayered multilayered Ti/TiN and TiAl/TiAlN coatings deposited on Ti6Al4V substrates. Surf. Coat. Technol. 2020, 387, 125531. [Google Scholar] [CrossRef]
- Torres-Madroñero, J.L.; Alvarez-Montoya, J.; Restrepo-Montoya, D.; Tamayo-Avendaño, J.M.; Nieto-Londoño, C.; Sierra-Pérez, J. Technological and operational aspects that limit small wind turbines performance. Energies 2020, 13, 6123. [Google Scholar] [CrossRef]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne wind energy systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef] [Green Version]
- Bechtle, P.; Schelbergen, M.; Schmehl, R.; Zillmann, U.; Watson, S. Airborne wind energy resource analysis. Renew. Energy 2019, 141, 1103–1116. [Google Scholar] [CrossRef]
- Wisatesajja, W.; Roynarin, W.; Intholo, D. Comparing the effect of rotor tilt angle on performance of floating offshore and fixed tower wind turbines. J. Sustain. Dev. 2019, 12, 84–95. [Google Scholar] [CrossRef]
- Taboada, J.V. Comparative analysis review on floating offshore wind foundations (FOWF). In Proceedings of the 54th Naval Engineering and Maritime Industry Congress, Ferrol, Spain, 14–16 October 2015; pp. 14–16. [Google Scholar]
- Jamieson, P. Innovation in Wind Turbine Design; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Watson, S.; Moro, A.; Reis, V.; Baniotopoulos, C.; Barth, S.; Bartoli, G.; Bauer, F.; Boelman, E.; Bosse, D.; Cherubini, A.; et al. Future emerging technologies in the wind power sector: A European perspective. Renew. Sustain. Energy Rev. 2019, 113, 109270. [Google Scholar] [CrossRef]
- Tavner, P.; Xiang, J.; Spinato, F. Reliability analysis for wind turbines. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2007, 10, 1–18. [Google Scholar] [CrossRef]
- Thangavelu, S.K.; Wan, T.G.L.; Piraiarasi, C. Flow simulations of modified diffuser augmented wind turbine. IOP Conf. Ser. Mater. Sci. Eng. 2020, 886, 012023. [Google Scholar] [CrossRef]
- Ohya, Y.; Karasudani, T.; Nagai, T.; Watanabe, K. Wind lens technology and its application to wind and water turbine and beyond. Renew. Energy Environ. Sustain. 2017, 2, 2. [Google Scholar] [CrossRef] [Green Version]
- Razdan, P.; Garrett, P. Life Cycle Assessment of Electricity Production from an Onshore V136-3.45 MW Wind Plant; Vestas Wind Systems A/S: Aarhus, Denmark, 2017. [Google Scholar]
- Robinson, L. Multi-society publication underscores MSE role in securing energy solutions. JOM 2010, 62, 96. [Google Scholar] [CrossRef] [Green Version]
- Haapala, K.R.; Prempreeda, P. Comparative life cycle assessment of 2.0 MW wind turbines. Int. J. Sustain. Manufact. 2014, 3, 170–185. [Google Scholar] [CrossRef]
- Giurco, D.; Dominish, E.; Florin, N.; Watari, T.; McLellan, B. Requirements for minerals and metals for 100% renewable scenarios. In Achieving the Paris Climate Agreement Goals; Springer: Cham, Switzerland, 2019; pp. 437–457. [Google Scholar]
- Oh, S.J.; Han, H.J.; Han, S.B.; Lee, J.Y.; Chun, W.G. Development of a tree-shaped wind power system using piezoelectric materials. Int. J. Energy Res. 2010, 34, 431–437. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Technique | Input Parameter | Prior Knowledge on Wind Turbine | Memory Needed | Complication of Control | Performance of Control |
|---|---|---|---|---|---|
| Optimal tip speed ratio (OTSR) | Not required | N | ↓ | ++ | |
| Wind turbine power curve (WTPC) | Required | Y | ↓↓ | ++ | |
| Rotational speed of generator Optimal torque (OT) | Required | N | ↓ | + | |
| Power signal feedback (PSF) | Required | Y | ↓↓ | + | |
| Secure sockets layer (SSL) | Required | Y | ↓↓↓ | + | |
| Hill-climbing search (HCS) | Required | Y | ↓↓↓ | + |
| Materials | Mass (%) | Components |
|---|---|---|
| Concrete | 50–60 | Foundation |
| Steel | 25–35 | Foundation, tower, nacelle, generator, gear box |
| Composite materials | 2–3 | Turbine blades |
| Electronic components | <1 | Generator |
| Copper (Cu) | <1 | Foundation, tower, nacelle, generator, gear box |
| Aluminium (Al) | <1 | Tower, nacelle |
| Polyvinyl chloride (PVC) | <1 | Foundation, Turbine blades |
| Lubricant and other liquids | <1 | Gearbox, generator |
| Self-cleaning coatings | <1 | Turbine blades, tower, gear box |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaudhuri, A.; Datta, R.; Kumar, M.P.; Davim, J.P.; Pramanik, S. Energy Conversion Strategies for Wind Energy System: Electrical, Mechanical and Material Aspects. Materials 2022, 15, 1232. https://0-doi-org.brum.beds.ac.uk/10.3390/ma15031232
Chaudhuri A, Datta R, Kumar MP, Davim JP, Pramanik S. Energy Conversion Strategies for Wind Energy System: Electrical, Mechanical and Material Aspects. Materials. 2022; 15(3):1232. https://0-doi-org.brum.beds.ac.uk/10.3390/ma15031232
Chicago/Turabian StyleChaudhuri, Anudipta, Rajkanya Datta, Muthuselvan Praveen Kumar, João Paulo Davim, and Sumit Pramanik. 2022. "Energy Conversion Strategies for Wind Energy System: Electrical, Mechanical and Material Aspects" Materials 15, no. 3: 1232. https://0-doi-org.brum.beds.ac.uk/10.3390/ma15031232