
Fabrication of Compliant and Transparent Hollow Cerebral Vascular Phantoms for In Vitro Studies Using 3D Printing and Spin–Dip Coating
 ,
,
Abstract
:1. Introduction
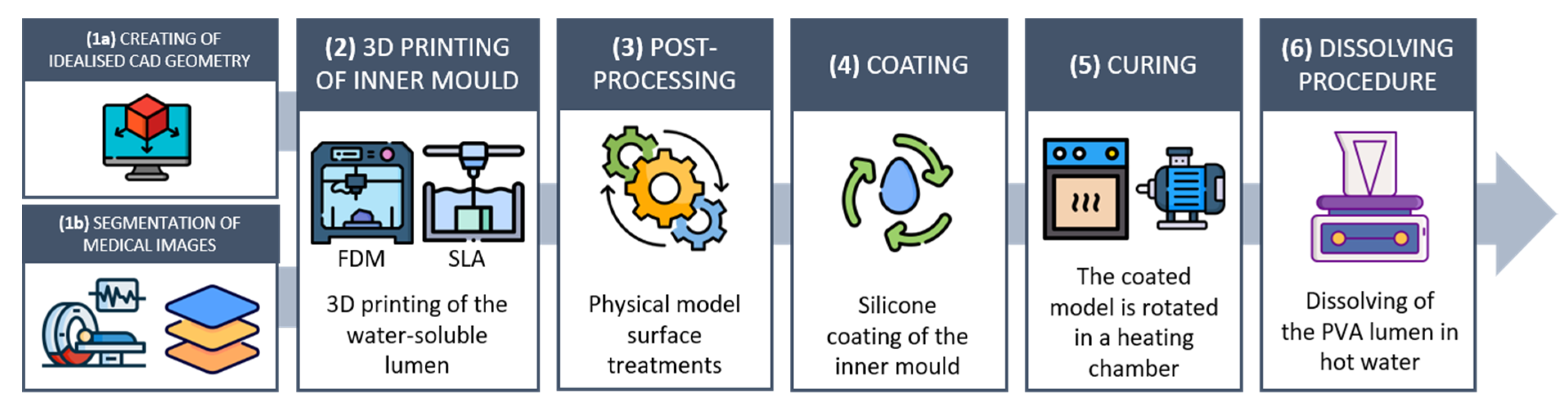
2. Material and Methods
- Build the CAD model of the vessel surface (idealised model) or obtain the 3D surface of the vessel from medical images through segmentation (patient-specific model);
- Obtain the inner mould of the vessel surface by 3D printing a water-soluble material. Two printing techniques, stereolithography and fused-deposition modelling, were compared for the production of the water-soluble inner mould;
- Post-process the 3D-printed mould;
- Manually encase the inner mould in transparent silicone using a spin–dip coating technique;
- Dissolve the water-soluble mould and extract the silicone model.
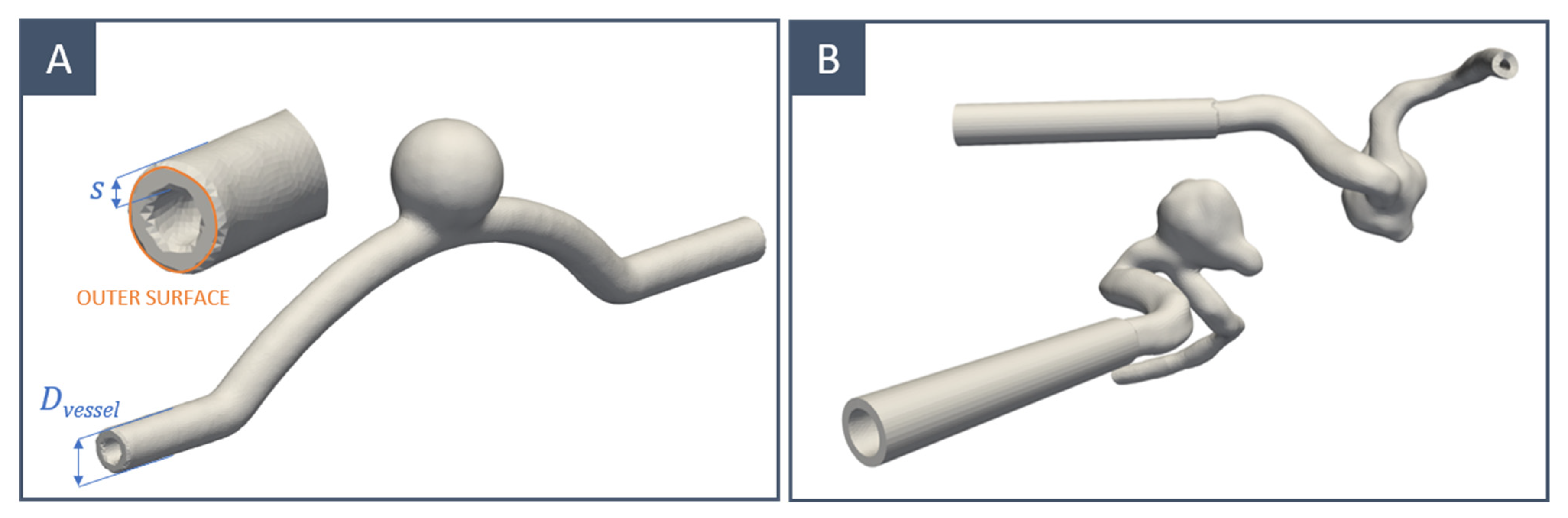
2.1. Vessel Design
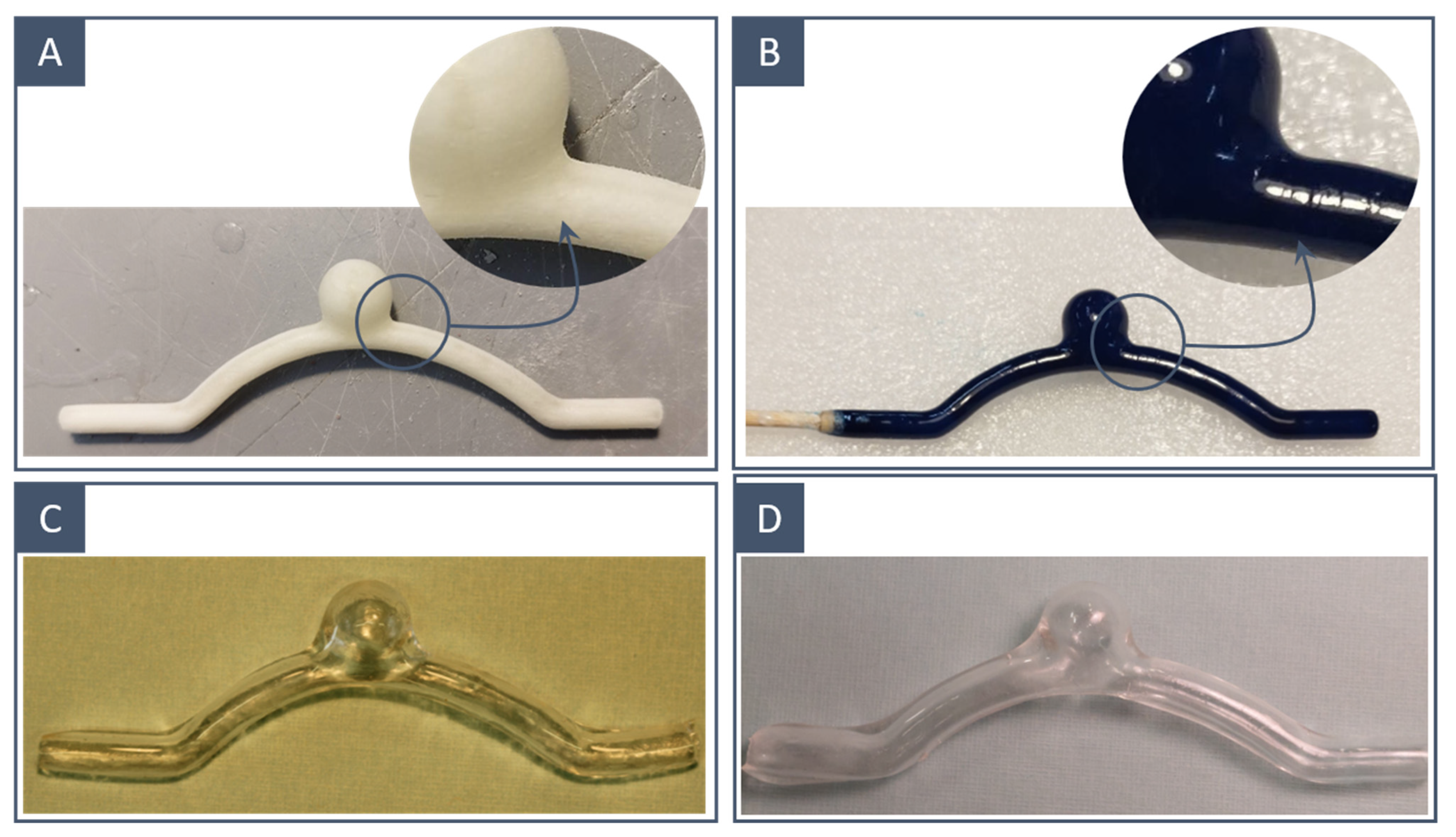
- Idealised models of a cerebral internal carotid artery characterised by the presence of a saccular aneurysm (Figure 2A);
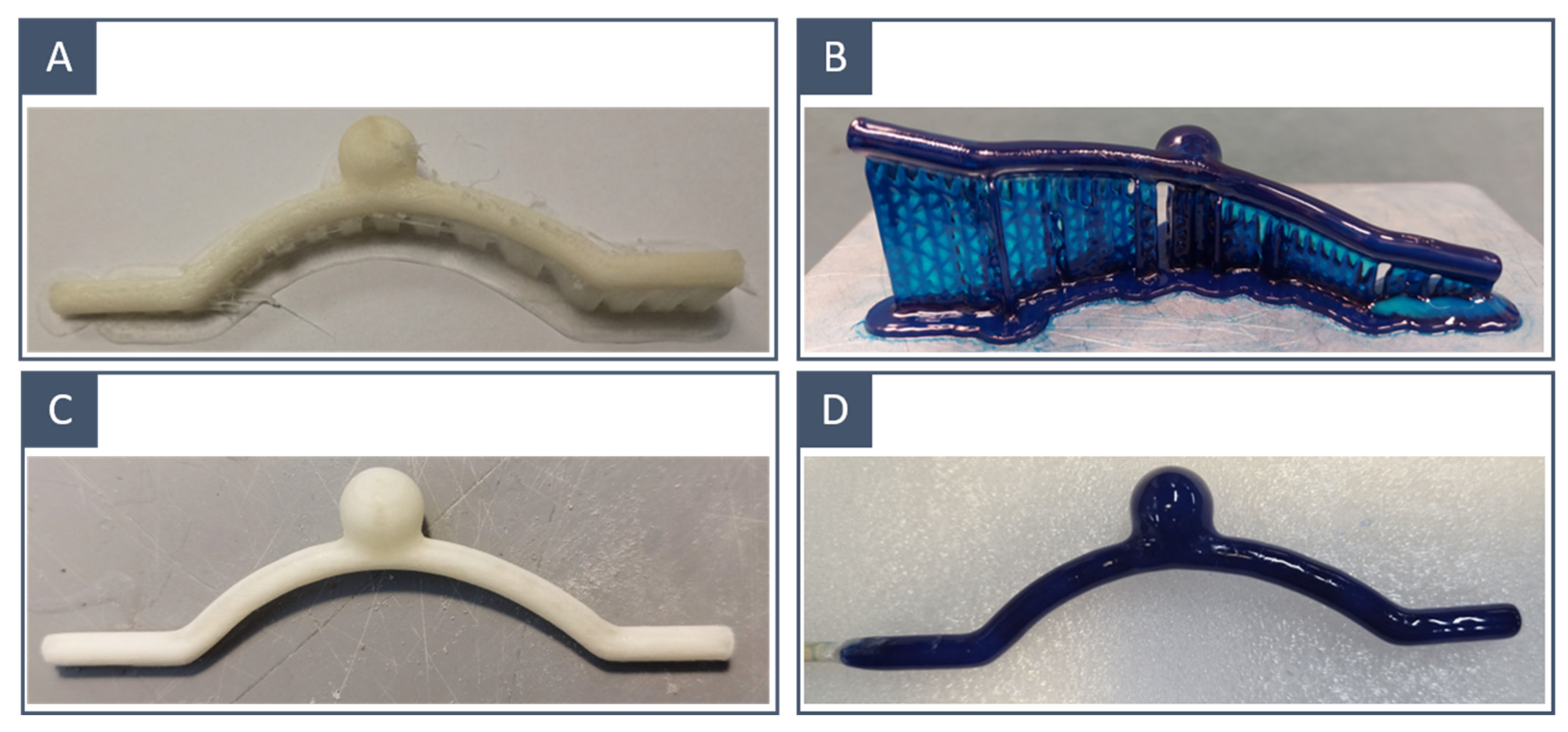
2.2. 3D Printing
2.2.1. Fusion Deposition Modelling
2.2.2. Stereolithography
2.3. Post-Processing
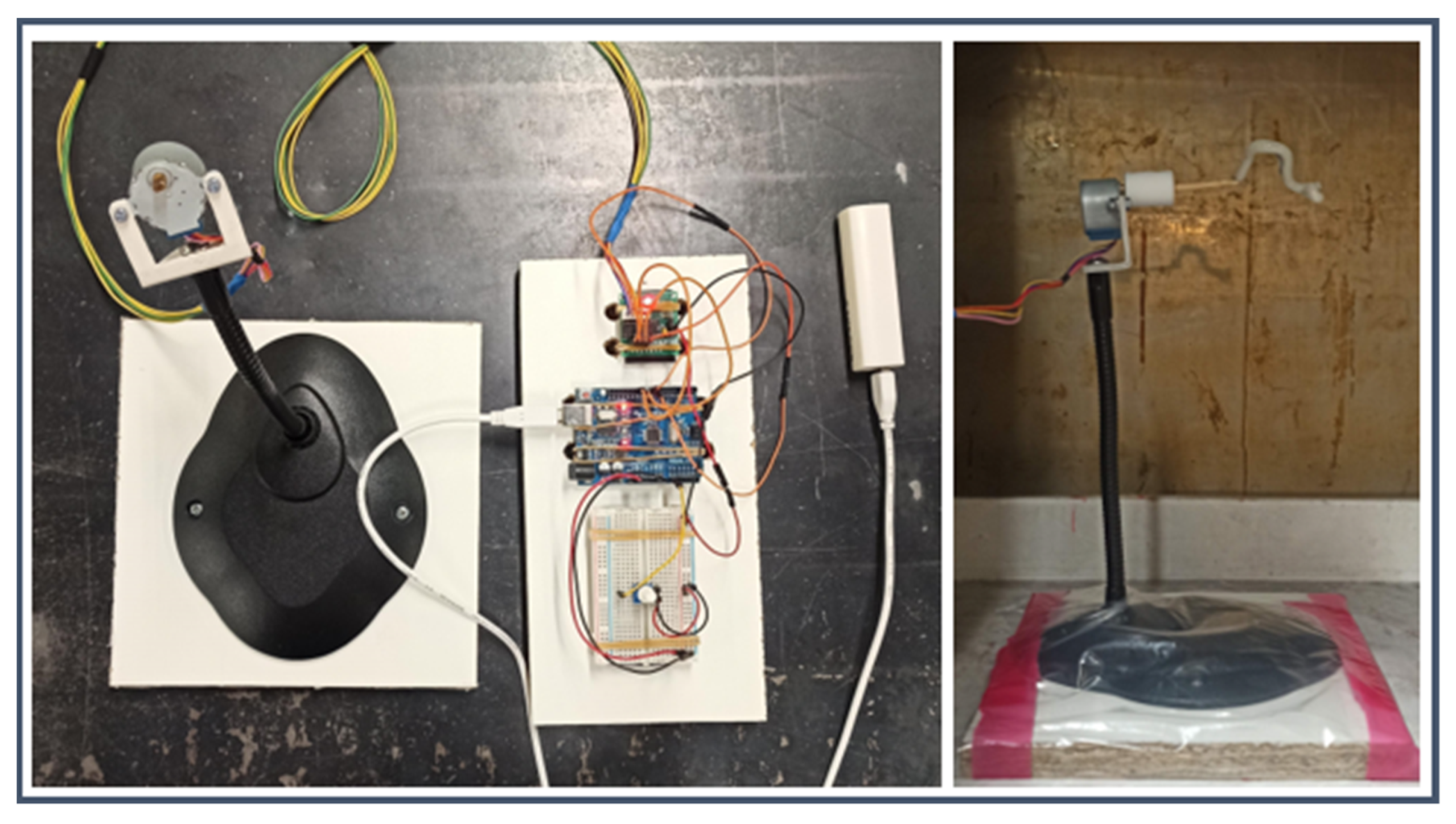
2.4. Coating
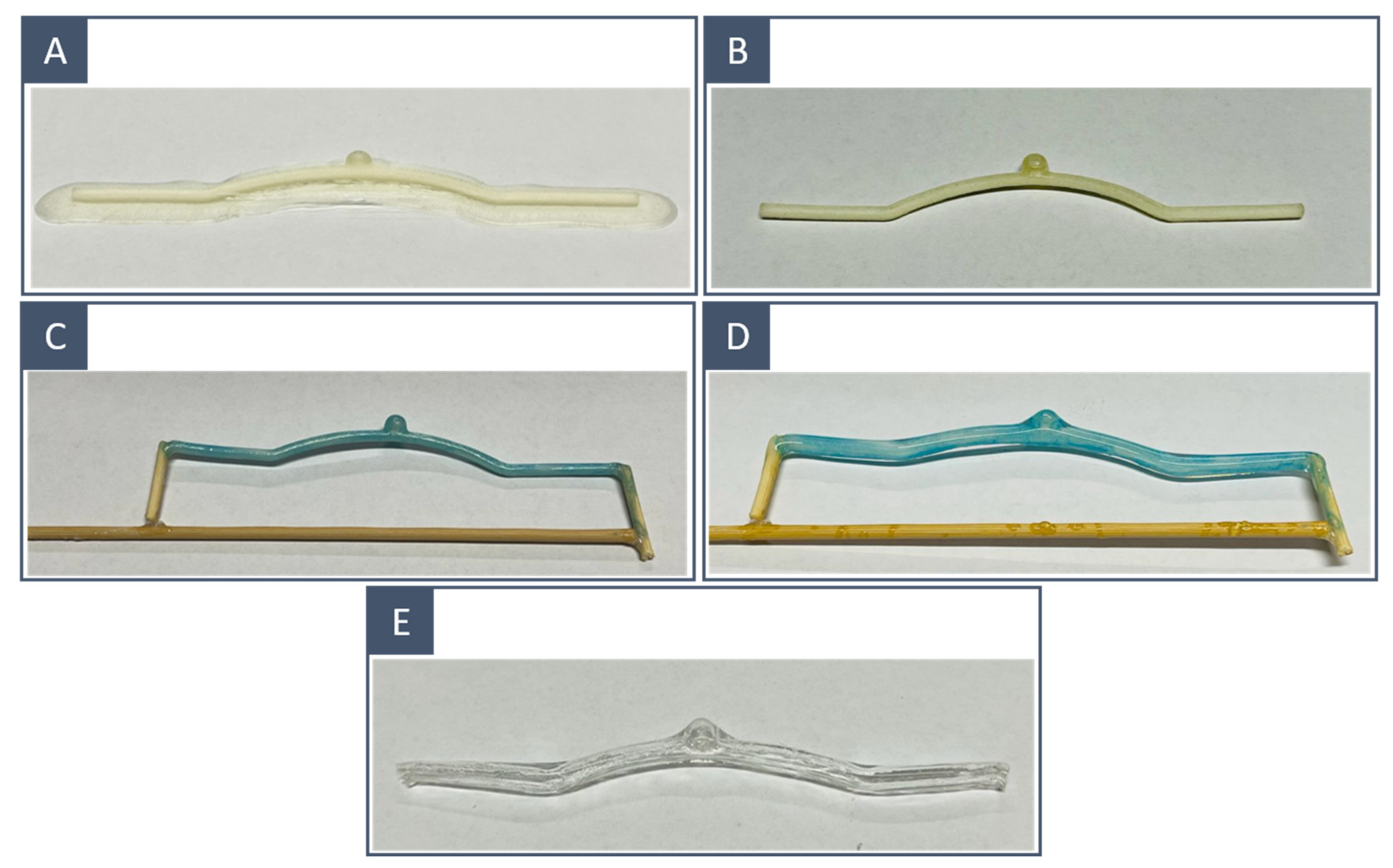
2.5. Dissolving Procedure
3. Results and Discussion
3.1. Inner Mould: 3D Printing Technique Comparison
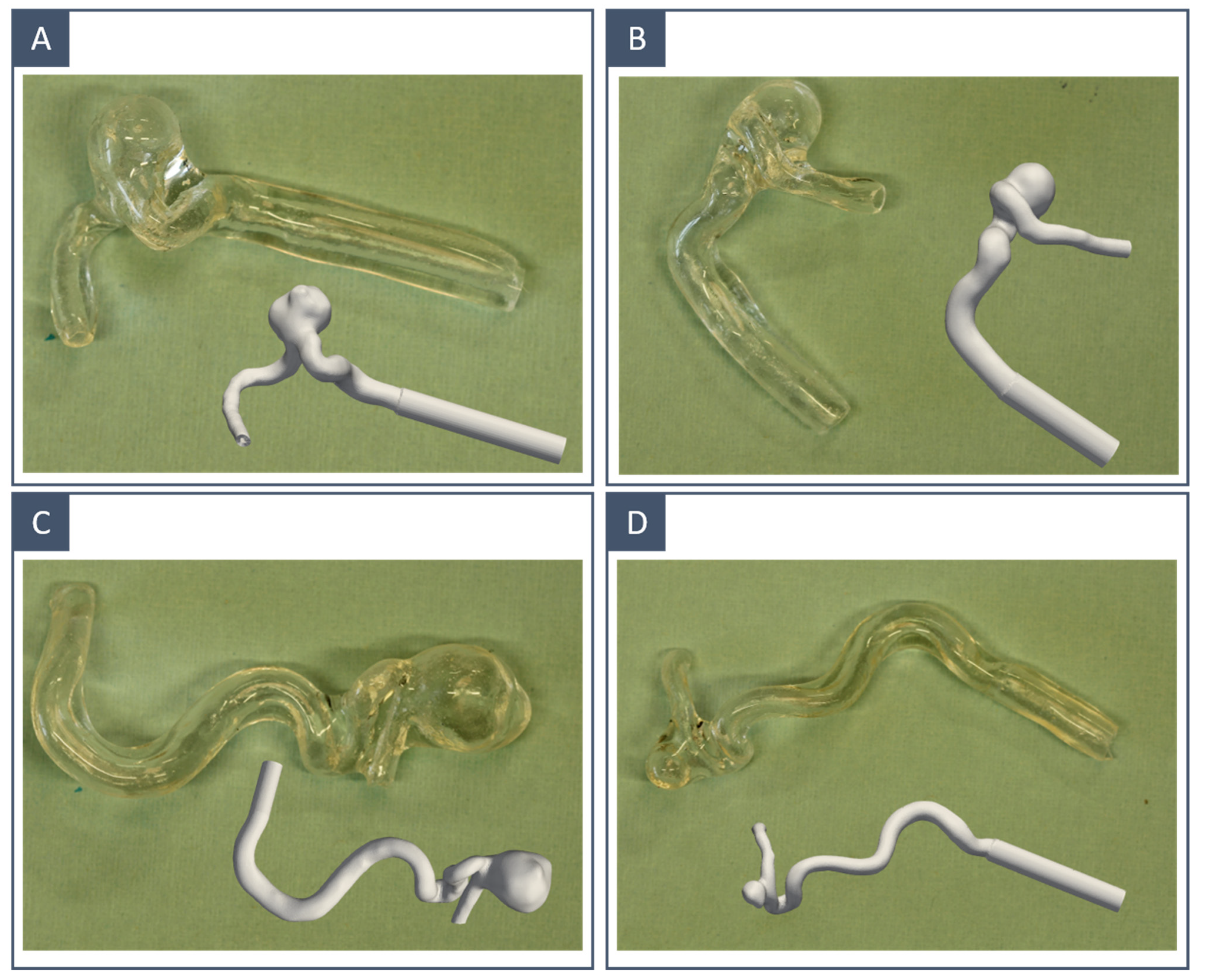
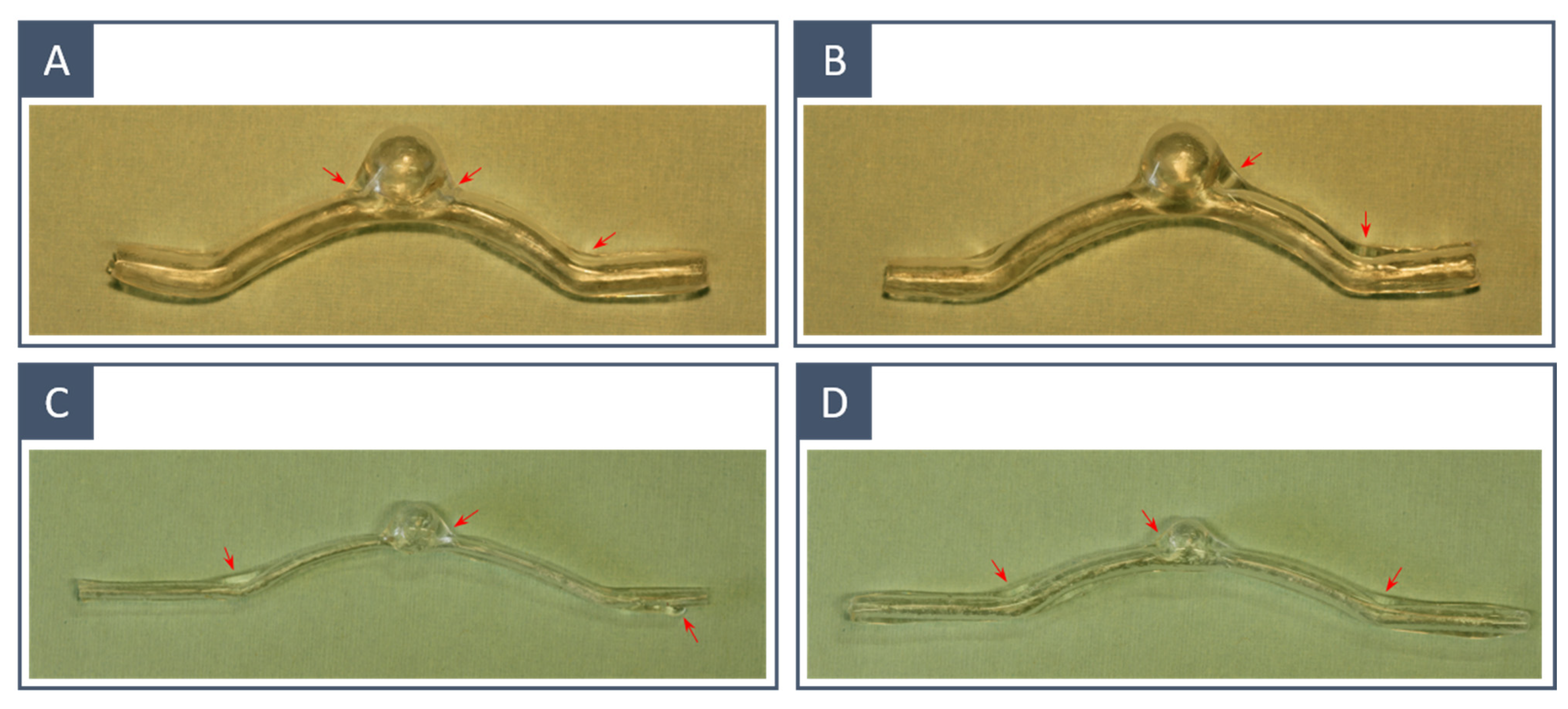
3.2. Final Models: Evaluation
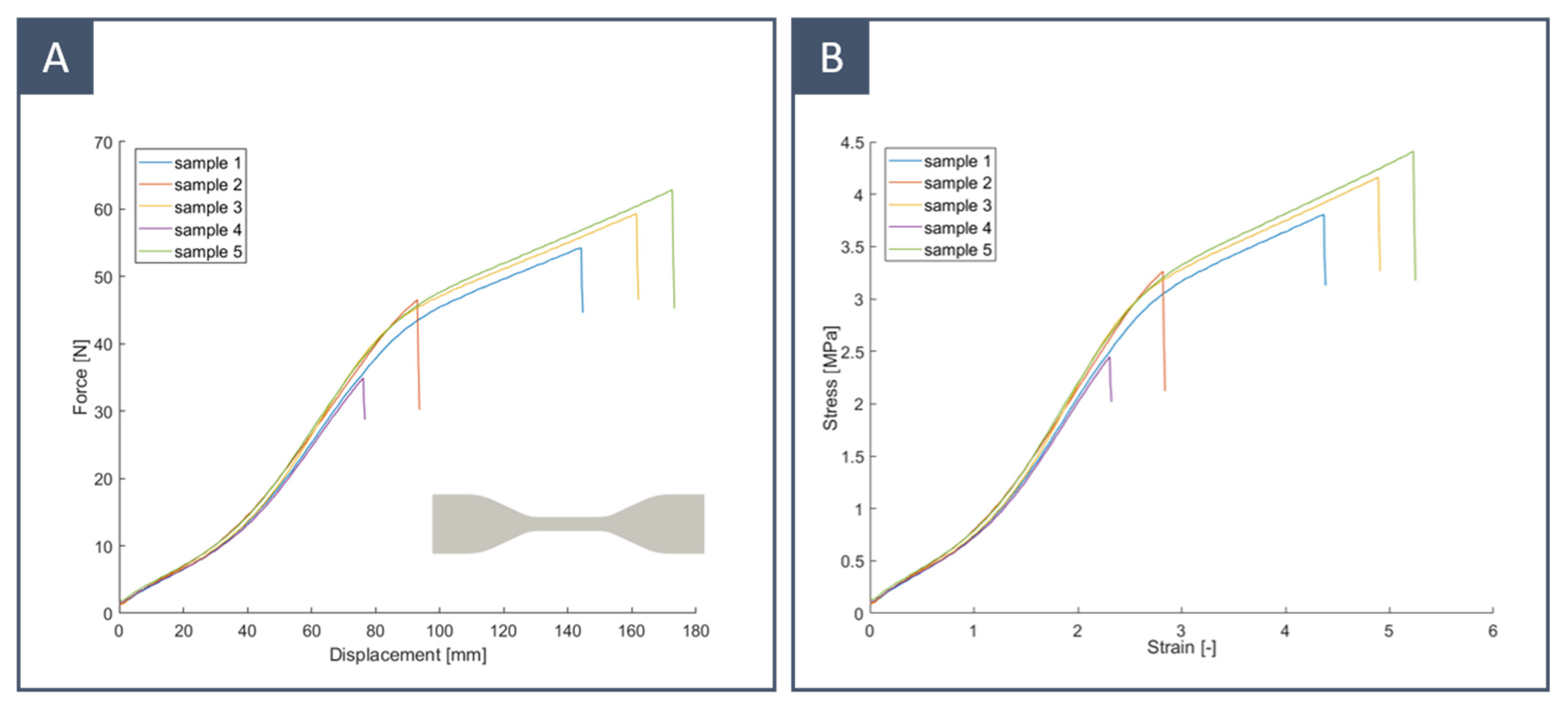
3.3. Silicone Layer: Material Characterisation
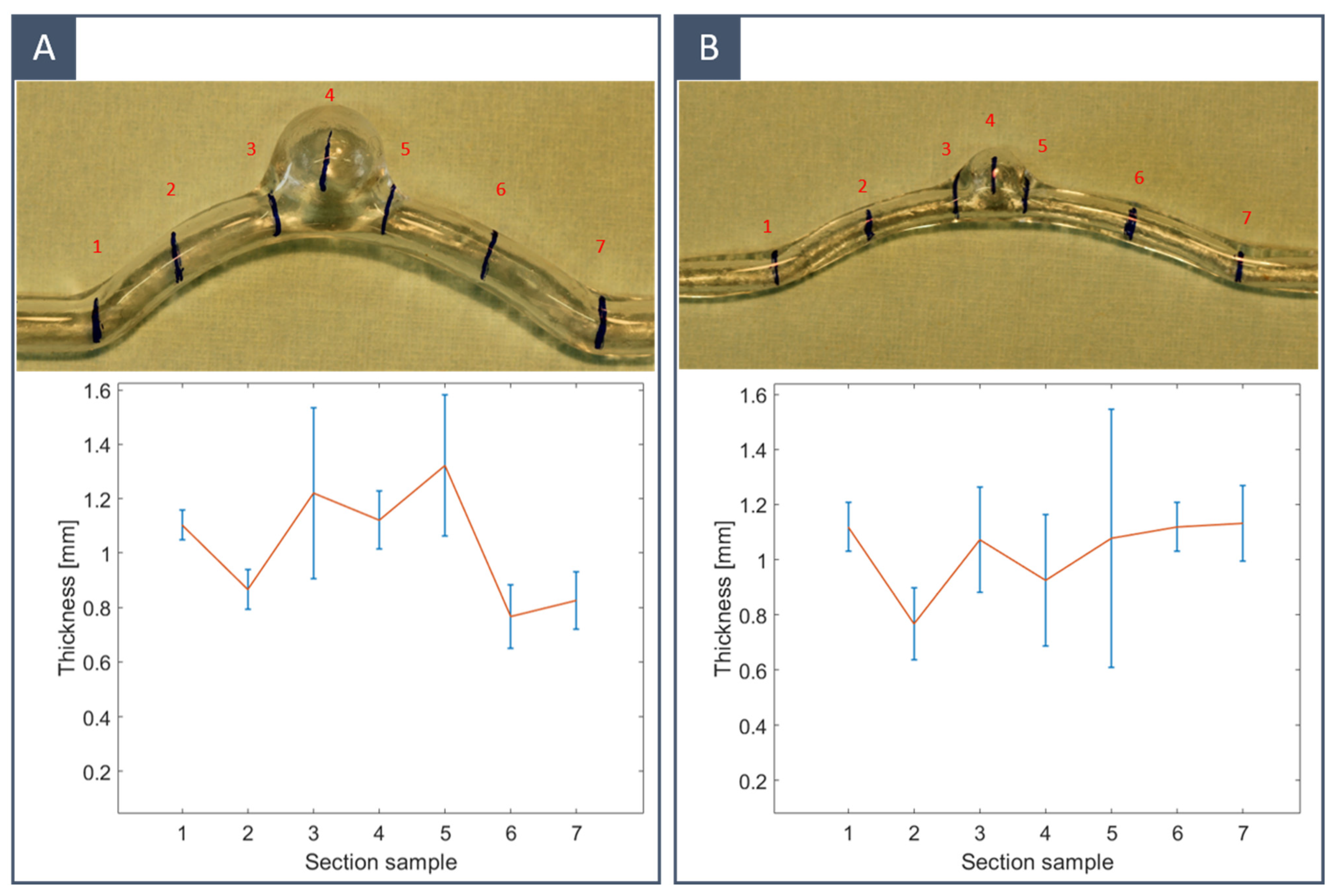
3.4. Final Model: Thickness Quantification
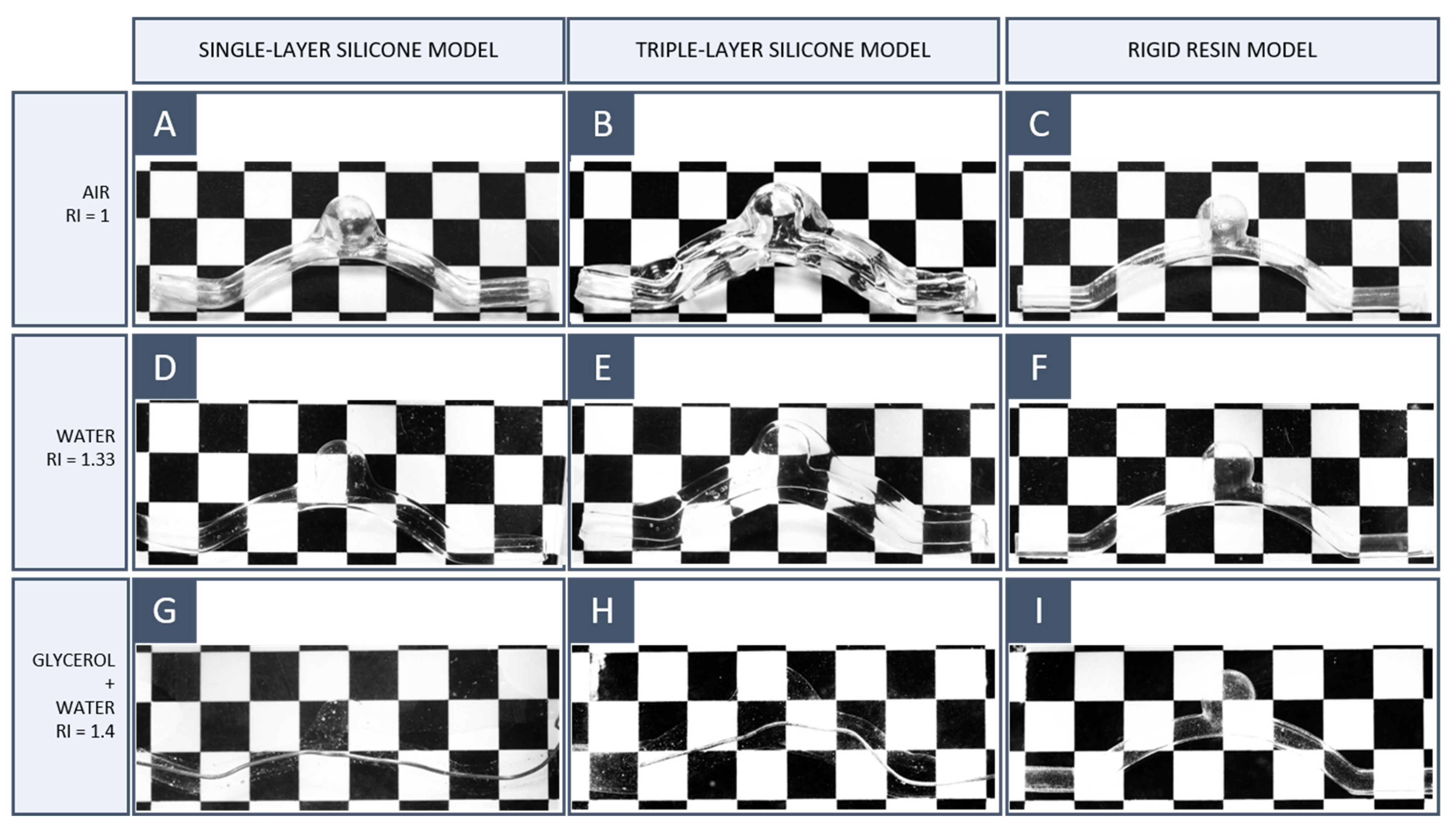
3.5. Final Model: Transparency Evaluation
- A single-silicone-layer model obtained with the workflow proposed here (S1);
- A triple-silicone-layer model obtained with the workflow proposed here (S2);
- A model printed using a transparent rigid resin (S3). The resin used was Somos WaterClear Ultra 10122 (Covestro Additive Manufacturing, Geleen, The Netherlands) and was 3D-printed using an SLA 3500 3D printer (3D Systems, Rock Hill, SC, USA).
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Martínez-Galdámez, M.; Escartín, J.; Pabón, B.; Diaz, C.; Martín-Reyes, R.; Hermosín, A.; Crespo, E.; Rodríguez, C.; Monedero, G.; Joshi, K.; et al. Optical coherence tomography: Translation from 3D-printed vascular models of the anterior cerebral circulation to the first human images of implanted surface modified flow diverters. Interv. Neuroradiol. 2019, 25, 150–156. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Deng, B.; Fang, Y.; Yu, Y.; Cheng, J.; Wang, S.; Wang, K.; Liu, J.M.; Huang, Q. Hemodynamic Changes Caused by Flow Diverters in Rabbit Aneurysm Models: Comparison of Virtual and Realistic FD Deployments Based on Micro-CT Reconstruction. PLoS ONE 2013, 8, e66072. [Google Scholar] [CrossRef] [PubMed]
- Hta, M.A.O.; Huan, C.; Akayama, T.; Akahashi, A.K.T. Three-Dimensional Reconstruction of a Cerebral Stent using Micro-CT for Computational Simulation. J. Intell. Mater. Syst. Struct. 2008, 19, 313–318. [Google Scholar] [CrossRef]
- Wang, S.; Ding, G.; Zhang, Y.; Yang, X. Computational haemodynamics in two idealised cerebral wide-necked aneurysms after stent placement. Comput. Methods Biomech. Biomed. Eng. 2011, 14, 927–937. [Google Scholar] [CrossRef] [PubMed]
- Romero, J.; Faisal, S.; Levitt, M.; Geindreau, C. Residence time analysis on cerebral aneurysms treated with coils using planar-laser-induced fluorescence and computational fluid dynamics. Biorxiv 2022. [Google Scholar] [CrossRef]
- Anderson, J.R.; Diaz, O.; Klucznik, R.; Zhang, Y.J.; Britz, G.W.; Grossman, R.G.; Lv, N.; Huang, Q.; Karmonik, C. Validation of Computational Fluid Dynamics Methods with Anatomically Exact, 3D Printed MRI Phantoms and 4D PcMRI. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Chicago, IL, USA, 26–30 August 2014; pp. 6699–6701. [Google Scholar]
- Anderson, J.R.; Klucznik, R.; Diaz, O.; Zhang, Y.J.; Britz, G.W.; Grossman, R.G.; Karmonik, C. Quantification of velocity reduction after flow diverter placement in intracranial aneurysm: An ex vivo study with 3D printed replicas. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milano, Italy, 25–29 August 2015; pp. 7300–7303. [Google Scholar] [CrossRef]
- Velvaluri, P.; Pravdivtseva, M.S.; Hensler, J.; Wodarg, F.; Jansen, O.; Quandt, E.; Hövener, J.B. A realistic way to investigate the design, and mechanical properties of flow diverter stents. Expert Rev. Med. Devices 2021, 18, 569–579. [Google Scholar] [CrossRef]
- Roloff, C.; Berg, P. Effect of flow diverter stent malposition on intracranial aneurysm hemodynamics-An experimental framework using stereoscopic particle image velocimetry. PLoS ONE 2022, 17, e0264688. [Google Scholar] [CrossRef]
- Raschi, M.; Mut, F.; Byrne, G.; Putman, C.M.; Tateshima, S.; Viñuela, F.; Tanoue, T.; Tanishita, K.; Cebral, J.R. CFD and PIV analysis of hemodynamics in a growing intracranial aneurysm. Int. J. Numer. Methods Biomed. Eng. 2012, 28, 214–228. [Google Scholar] [CrossRef] [Green Version]
- Babiker, M.H.; Gonzalez, L.F.; Felipe, A.; Collins, D.; Elvikis, A.; Frakes, D.H. Quantitative effects of coil packing density on cerebral aneurysm fluid dynamics: An in vitro steady flow study. Ann. Biomed. Eng. 2010, 38, 2293–2301. [Google Scholar] [CrossRef]
- Babiker, M.H.; Chong, B.; Gonzalez, L.; Cheema, S.; Frakes, D.H. Finite element modeling of embolic coil deployment: Multifactor characterization of treatment effects on cerebral aneurysm hemodynamics. J. Biomech. 2013, 46, 2809–2816. [Google Scholar] [CrossRef]
- Lownie, S.; Kalata, W.; Loth, F.; Holdsworth, D.W. PIV-Measured Versus CFD-Predicted Flow Dynamics in Anatomically Realistic Cerebral Aneurysm Models. J. Biomech. Eng. 2008, 130, 021015. [Google Scholar] [CrossRef] [Green Version]
- Berti, F.; Antonini, L.; Poletti, G.; Fiuza, C.; Vaughan, T.J.; Migliavacca, F.; Petrini, L.; Pennati, G. How to Validate in silico Deployment of Coronary Stents: Strategies and Limitations in the Choice of Comparator. Front. Med. Technol. 2021, 3, 37. [Google Scholar] [CrossRef] [PubMed]
- Ramella, A.; Migliavacca, F.; Rodriguez Matas, J.F.; Heim, F.; Dedola, F.; Marconi, S.; Conti, M.; Allievi, S.; Mandigers, T.J.; Bissacco, D.; et al. Validation and Verification of High-Fidelity Simulations of Thoracic Stent-Graft Implantation. Ann. Biomed. Eng. 2022. [Google Scholar] [CrossRef] [PubMed]
- Jermy, M.C. Making it clear: Flexible, transparent laboratory flow models for soft and hard problems. In Proceedings of the 8th World Conference on Experimental Heat Transfer, Fluid Mechanics, and Thermodynamics, Lisbon, Portugal, 16–20 June 2013. [Google Scholar]
- Ionita, C.N.; Mokin, M.; Varble, N.; Bednarek, D.R.; Xiang, J.; Snyder, K.V.; Siddiqui, A.H.; Levy, E.I.; Meng, H.; Rudin, S. Challenges and limitations of patient-specific vascular phantom fabrication using 3D Polyjet printing. In Proceedings of the Volume 9038, Medical Imaging 2014: Biomedical Applications in Molecular, Structural, and Functional Imaging, San Diego, CA, USA, 15–20 February 2014; pp. 164–175. [Google Scholar] [CrossRef] [Green Version]
- Kwon, J.; Ock, J.; Kim, N. Mimicking the mechanical properties of aortic tissue with pattern-embedded 3d printing for a realistic phantom. Materials 2020, 13, 5042. [Google Scholar] [CrossRef]
- Cloonan, A.J.; Shahmirzadi, D.; Li, R.; Doyle, B.; Konofagou, E.; McGloughlin, T.M. 3D-printed tissue-mimicking phantoms for medical imaging and computational validation applications. 3D Print. Addit. Manuf. 2014, 1, 14–23. [Google Scholar] [CrossRef]
- Erbano, B.O.; Opolski, A.C.; Olandoski, M.; Foggiatto, J.A.; Kubrusly, L.F.; Dietz, U.A.; Zini, C.; Marinho, M.M.M.A.; Leal, A.G.; Ramina, R. Rapid prototyping of three-dimensional biomodels as an adjuvant in the surgical planning for intracranial aneurysms. Acta Cir. Bras. 2013, 28, 756–761. [Google Scholar] [CrossRef] [Green Version]
- Sommer, K.; Izzo, R.L.; Shepard, L.; Podgorsak, A.R.; Rudin, S.; Siddiqui, A.H.; Wilson, M.F.; Angel, E.; Said, Z.; Springer, M.; et al. Design optimization for accurate flow simulations in 3D printed vascular phantoms derived from computed tomography angiography. In Proceedings of the Volume 10138, Medical Imaging 2017: Imaging Informatics for Healthcare, Research, and Applications, Orlando, FL, USA, 11–16 February 2017; pp. 180–191. [Google Scholar] [CrossRef] [Green Version]
- Ho, W.H.; Tshimanga, I.; Ngoepe, M.; Jermy, M.; Geoghegan, P.H. Evaluation of a Desktop 3D Printed Rigid Refractive-Indexed-Matched Flow Phantom for PIV Measurements on Cerebral Aneurysms. Cardiovasc. Eng. Technol. 2020, 11, 14–23. [Google Scholar] [CrossRef]
- Aycock, K.I.; Hariharan, P.; Craven, B.A. Particle image velocimetry measurements in an anatomical vascular model fabricated using inkjet 3D printing. Exp. Fluids 2017, 58, 154. [Google Scholar] [CrossRef]
- Stefano, G.; Salvatore, P.; Alba, S.; Silvia, V.; Vincenzo, T.; Federica, T. 3D Stereolithography for hollow cerebral aneurysm models. Procedia CIRP 2022, 110, 203–207. [Google Scholar] [CrossRef]
- Yazdi, S.G.; Geoghegan, P.; Docherty, P.; Jermy, M.; Khanafer, A. A Review of Arterial Phantom Fabrication Methods for Flow Measurement Using PIV Techniques. Ann. Biomed. Eng. 2018, 46, 1697–1721. [Google Scholar] [CrossRef] [PubMed]
- Cao, P.; Duhamel, Y.; Olympe, G.; Ramond, B.; Langevin, F. A new production method of elastic silicone carotid phantom based on MRI acquisition using rapid prototyping technique. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 5331–5334. [Google Scholar] [CrossRef]
- Annio, G.; Palombi, A.; Gallarello, A.; Homer-vanniasinkam, S.; Tsang, V.; Di, V. Low cost fabrication of PVA based personalised vascular phantoms for in vitro haemodynamic studies: Three applications. J. Eng. Sci. Med. Diagn. Ther. 2020, 3, 034501. [Google Scholar] [CrossRef]
- Arcaute, K.; Wicker, R.B. Patient-specific compliant vessel manufacturing using dip-spin coating of rapid prototyped molds. J. Manuf. Sci. Eng. 2008, 130, 0510081–05100813. [Google Scholar] [CrossRef]
- Chi, Q.Z.; Mu, L.; He, Y.; Luan, Y.; Jing, Y.C. A Brush–Spin–Coating Method for Fabricating In Vitro Patient-Specific Vascular Models by Coupling 3D-Printing. Cardiovasc. Eng. Technol. 2021, 12, 200–214. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, Q.; Du, S.; Chen, Z.; Fu, J.; Chen, B.; Liu, Z.; He, Y. Fabrication of cerebral aneurysm simulator with a desktop 3D printer. Sci. Rep. 2016, 7, 44301. [Google Scholar] [CrossRef] [Green Version]
- Nagassa, R.G.; McMenamin, P.; Adams, J.; Quayle, M.; Rosenfeld, J.V. Advanced 3D printed model of middle cerebral artery aneurysms for neurosurgery simulation. 3D Print. Med. 2019, 5, 11. [Google Scholar] [CrossRef] [Green Version]
- Gailloud, P.; Pray, J.; Muster, M.; Piotin, M.; Fasel, J.; Rüfenacht, D.A. An in vitro anatomic model of the human cerebral arteries with saccular arterial aneurysms. Surg. Radiol. Anat. 1997, 19, 119–121. [Google Scholar] [CrossRef]
- Wetzel, S.G.; Ohta, M.; Handa, A.; Auer, J.M.; Lylyk, P.; Lovblad, K.O.; Babic, D.; Rufenacht, D.A. From patient to model: Stereolithographic modeling of the cerebral vasculature based on rotational angiography. Am. J. Neuroradiol. 2005, 26, 1425–1427. [Google Scholar]
- Nilsson, D.; Holmgren, M.; Holmlund, P.; Wåhlin, A.; Eklund, A.; Dahlberg, T.; Wiklund, K.; Andersson, M. Patient-specific brain arteries molded as a flexible phantom model using 3D printed water-soluble resin. Sci. Rep. 2022, 12, 1–9. [Google Scholar] [CrossRef]
- Aneurisk-Team, AneuriskWeb Project Website 2012. Available online: http://ecm2.mathcs.emory.edu/aneuriskweb. (accessed on 19 December 2022).
- Krejza, J.; Arkuszewski, M.; Kasner, S.E.; Weigele, J.; Ustymowicz, A.; Hurst, R.W.; Cucchiara, B.L.; Messe, S.R. Carotid artery diameter in men and women and the relation to body and neck size. Stroke 2006, 37, 1103–1105. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Steiger, H.J.; Aaslid, R.; Keller, S.; Reulen, H.J. Strength, elasticity and viscoelastic properties of cerebral aneurysms. Heart Vessel. 1989, 5, 41–46. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Height [mm] | Printing Temperature [°C] | Build Plate Temperature [°C] | Print Speed [mm/s] |
|---|---|---|---|
| 0.075 | 194 | 70 | 70 |
| Layer Height [mm] | Layer Exposure Time [s] | Bottom Layers Exposure Time [s] | Bottom Layers [–] | Exposure Off Time [s] | z-Lift Distance [mm] | Platform Lift Distance [mm/min] |
|---|---|---|---|---|---|---|
| 0.05 | 20 | 170 | 5 | 2 | 5 | 100 |
| Density 23 °C [g/cm3] | Hardness Durometer A | Tensile Strength [MPa] | Elongation at Break [%] | Tear Strength [kN/m] |
|---|---|---|---|---|
| 1.03 | 28 | 3.5 | 450 | 12 |
| Structure | Elastic Modulus MPa |
|---|---|
| Aneurysm fundi | 1.7 ± 0.8 |
| Aneurysm necks | 3.1 ± 0.9 |
| Arteries | 2.5 ± 1.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bisighini, B.; Di Giovanni, P.; Scerrati, A.; Trovalusci, F.; Vesco, S. Fabrication of Compliant and Transparent Hollow Cerebral Vascular Phantoms for In Vitro Studies Using 3D Printing and Spin–Dip Coating. Materials 2023, 16, 166. https://0-doi-org.brum.beds.ac.uk/10.3390/ma16010166
Bisighini B, Di Giovanni P, Scerrati A, Trovalusci F, Vesco S. Fabrication of Compliant and Transparent Hollow Cerebral Vascular Phantoms for In Vitro Studies Using 3D Printing and Spin–Dip Coating. Materials. 2023; 16(1):166. https://0-doi-org.brum.beds.ac.uk/10.3390/ma16010166
Chicago/Turabian StyleBisighini, Beatrice, Pierluigi Di Giovanni, Alba Scerrati, Federica Trovalusci, and Silvia Vesco. 2023. "Fabrication of Compliant and Transparent Hollow Cerebral Vascular Phantoms for In Vitro Studies Using 3D Printing and Spin–Dip Coating" Materials 16, no. 1: 166. https://0-doi-org.brum.beds.ac.uk/10.3390/ma16010166