
Research Progress and Prospects of Vehicle Driving Behavior Prediction

School of Traffic & Transportation, Chongqing Jiaotong University, Chongqing 400074, China
*
Author to whom correspondence should be addressed.
World Electr. Veh. J. 2021, 12(2), 88; https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12020088
Submission received: 14 May 2021
/
Revised: 15 June 2021
/
Accepted: 17 June 2021
/
Published: 18 June 2021
Abstract
:Autonomous driving technology is vital for intelligent transportation systems. Vehicle driving behavior prediction is the foundation and core of autonomous driving. A detailed review of the existing research on vehicle driving behavior prediction can improve the understanding of the current progress of research on autonomous driving and provide references for follow-up researchers. This paper primarily reviews and analyzes the control models of autonomous driving, prejudgment methods, on-road and intersection traffic decision-making, and shortcomings of the research about the prediction of individual intelligent vehicle driving behavior, the prediction on movements of vehicles connected via the Internet, and prediction of driving behavior in a mixed traffic environment. The deficiencies in the research on vehicle driving behavior prediction are as follows: (1) there are numerous limitations in the intelligent application scenarios of individual intelligent vehicles; (2) although the Internet of Vehicles is a significant developmental trend, the training and test datasets are not rich enough; and (3) as the research of mixed traffic flow is still in the initial stages, the comfort brought by autonomous driving in hybrid driving environments is not being considered. In addition to the above analyses and comments, the future research prospects of vehicle driving behavior prediction are discussed as well.
1. Introduction
The rapid increase in car ownership in the last few years has led to a corresponding increase in traffic accidents. According to the World Health Organization (WHO), traffic accidents are one of the top ten causes of death globally. An accident report published by Volvo revealed that human error is the main cause in nearly 90% of all traffic accidents. Advanced driver assistance systems (ADASs) or autonomous vehicles (AVs) are considered to be effective solutions in reducing human error and the corresponding rate of traffic accidents.
Prejudgment of the vehicle driving intention and behavior is the basis of AVs and is the primary focus of scholars in related fields. Depending on whether the vehicle interacts with roadside infrastructure and other vehicles, autonomous driving vehicles can be divided into two groups: individual intelligent vehicles and the Internet of Vehicles (IoV). As the degree of intelligence and automation of vehicles in actual traffic is uneven, the recognition and prediction of vehicle driving behavior in various traffic environments have become key considerations in the development of IoV and AVs.
Several studies on driving behavior prediction have been conducted in recent years, using methods such as support vector machines, Markov chains, neural networks, Bayesian methods, and game theory. These methods are based on a wide variety of disciplines, including computer science, mathematics, economics, and physics. The models used in these methods range from rule-based models to learning algorithm models and from one-sided description models to specific functional models. However, most models are based on individual intelligent vehicles. The advantages offered by IoV are not exploited, and mixed traffic driving environments are often ignored.
This paper reviews research on individual intelligent vehicle driving behavior prediction, IoV driving behavior prediction, and driving behavior prediction in mixed traffic driving environments to obtain a detailed understanding of the current progress of research on vehicle driving behavior prediction, which is an important subset of AV control challenges. The contribution of this paper is twofold. At first, we explore the different driver behavior prediction models. The results show that IoV has more advantages. The second contribution is about the prospects of AVs.
2. Research on Individual Intelligent Vehicle Driving Behavior Prediction
The original definition of an AV is an individual intelligent vehicle that relies on recognizing the behavior of surrounding vehicles to predict their short-term trajectories and then makes reasonable driving plans, such as staying in lane or changing lanes, using algorithms, models, functions, and other methods.
2.1. Individual Intelligent Vehicle Motion-Planning Model
The global positioning of AVs is realized by an onboard GPS, and local path planning is completed by a motion-planning model.
Numerous scholars have systematically reviewed predictive decision-making models of individual intelligent vehicle behavior. Thomas et al. [1] reviewed the research results of an AV behavior decision-making system, compared and analyzed the research progress of various behavior models, and emphasized the importance of driving behavior analysis. Kumar and Prasad [2] divided driving behavior models into analysis models and prediction models, compared and analyzed numerous models in detail, and showed that driver behavior models significantly differ from different vehicle drivers. Xiong et al. [3] divided driving behavior decision models into two types of models, namely rule-based and learning algorithm-based models; they affirmed the superiority of the latter. In contrast, Chen et al. [4] proposed a novel system based on the combined research results of the two kinds of driving behavior models: descriptive models and functional models. They revealed that existing descriptive models are too one-sided and functional models lack reliable big data support, making them unsuitable for the complex traffic environments found in China.
Recently, machine learning has been widely employed in the field of driver behavior recognition, particularly by Tesla, which, based on camera visual perception, uses artificial intelligence and data learning to perform behavior prediction and trajectory planning.
Berndt et al. [5] used the hidden Markov model (HMM) to recognize driving intentions. Zhu et al. [6] and Zhang et al. [7] proposed a driving behavior recognition method based on a support vector machine (SVM); the test results demonstrated a good recognition effect. Liu et al. [8] integrated the HMM and SVM methods to improve the accuracy of driving intention recognition. Considering a case with an insufficient sample dataset for machine learning, Zong et al. [9] proposed a driver behavior prediction model based on the HMM and an artificial neural network (ANN), which uses the HMM to tutor the ANN to improve learning. An experiment proved that multiview convolutional neural network (MV-CNN) and joint data augmentation (JDA) have better generalization ability than ANN [10].
Although a machine learning classification algorithm can identify the intention of a driver to change lanes to the left or right lane or stay in the current lane, it cannot provide a specific driving trajectory. Consequently, Ye et al. [11] used a kinematic or dynamic model to predict vehicle trajectory. Hu et al. [12] proposed an AV path planning method based on discrete optimization.
Ji et al. [13] believed that trajectory and driving intention should be predicted simultaneously. Therefore, they used deep learning methods to design a driving intention recognition and vehicle trajectory prediction model based on a long short-term memory (LSTM) network. The proposed model significantly improved the accuracy of intention recognition and trajectory prediction of the surrounding vehicles.
2.2. Prediction of Individual Intelligent Vehicle Behavior Recognition
2.2.1. Prediction of Individual Intelligent Vehicle Driving Behavior on Roads
On-road driving can be divided into straight and lane-changing driving behaviors. Both behaviors must be accurately predicted and judged by AVs to ensure smooth and safe driving in continuous traffic flow.
Adaptive cruise control (ACC) is used to detect and track the vehicle ahead and maintain a safe and comfortable distance. The concept of car-following is implemented based on this technology. ACC is one of the most important technologies for AVs. It improves driving comfort, reduces driver error, improves safety, increases traffic capacity, and reduces fuel consumption. Numerous scholars have conducted detailed research on ACC. Zhu et al. [14] calibrated the response time parameters between vehicles based on the experience of skilled drivers and proposed an ACC control strategy based on response time to improve the safety and reliability of the system. Zhu et al. [15] used deep reinforcement learning theory to optimize car-following control in ACC. Luo et al. [16] proposed a multiobjective ACC algorithm based on a model predictive control (MPC) framework that significantly improved driving comfort and fuel economy.
Compared to straight driving, lane-changing behavior can be dangerous and cause serious accidents, primarily due to the inaccurate estimation of the surrounding traffic. Extensive research has been conducted on lane-change control systems to alleviate this problem. Chen et al. [17] combined rough set methods to propose lane-changing rules for AVs in an urban environment. Jiang et al. [18] determined an optimal lane-changing trajectory based on the hp-adaptive pseudospectral method and manual driving trajectory and established lane-changing rules for AVs in emergency situations. From the perspective of machine learning, dynamic Bayesian networks [19,20] and random forest methods [21] have also been widely used to intelligently predict the trajectory of a vehicle lane-changing maneuver.
2.2.2. Prediction of Individual Intelligent Vehicle Driving Behavior at Intersections
Road intersections are vital for traffic movement and are required for vehicles to gather, turn, and evacuate. Safe and efficient passing through intersections is an important area of research for AVs. As individual intelligent vehicles cannot interact with other vehicles and achieve collaborative control, they cannot rely solely on motion models to pass through complex intersections. Song et al. [22] stated that AVs must understand the driving intentions of human drivers, and they proposed an intention decision-making algorithm to ensure that AVs can pass through intersections intelligently. In contrast, Cheng et al. [23] used a different approach and believed that purely probabilistic or evidence-based techniques were not sufficiently effective tools for such decision-making. They suggested that game theory tools can better judge and recognize the evolution of uncertain situations, and they proposed a game model for AVs driving through intersections with both manned and unmanned vehicles.
Unsignalized intersections (USI) also are challenging for AVs due to high uncertainties. Yang et al. [24] identified multiple impact variables of AVs at USI using a random forest approach.
2.3. Research Comments
- 1.
- Individual intelligent vehicle motion-planning model
The rule-based behavior decision system represented by the finite state machine is widely used in the DARPA Urban Challenge. However, methods such as convolutional neural networks and deep learning based on learning algorithms rely too much on the richness and accuracy of training data; nevertheless, Kumar, Xiong, and Chen believed that they have significant potential in the field of autonomous driving.
Considering the research on behavior prediction and decision-making, the introduction of machine learning and other technologies to intelligent vehicle control, such as in the models proposed by Berndt, Zhu, Liu, and other scholars, appears to be a general trend. However, the extraction and collection of learning data must be considered. Considering the field of machine learning, classification algorithms can better identify driving intentions, regression algorithms can effectively extrapolate driving trajectories, and clustering algorithms can be used to analyze driving styles.
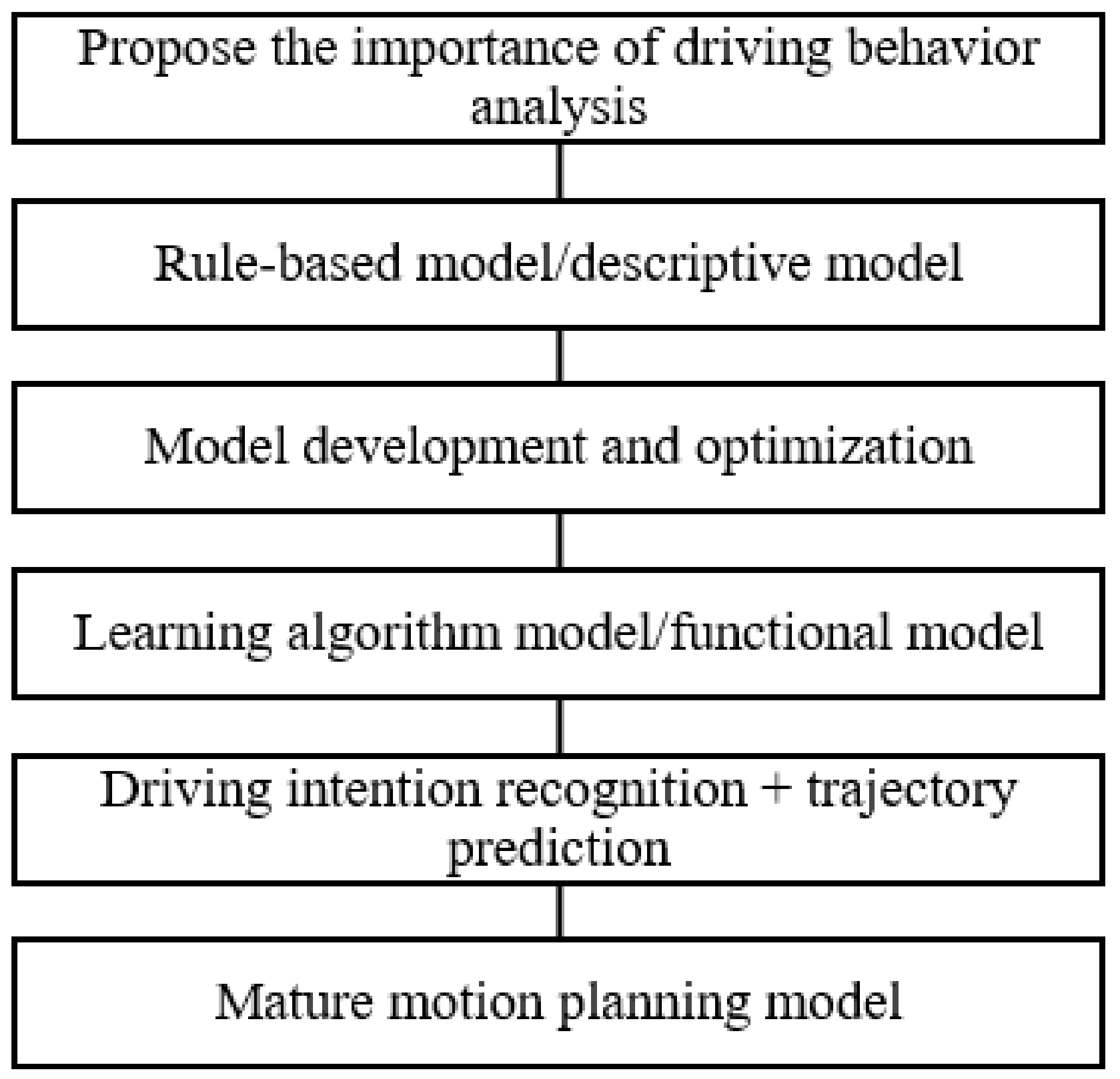
The individual intelligent vehicle models listed in Table 1 were all developed toward personalized and intelligent fully automated driving, as shown in Figure 1. Owing to the upper limit of the ability of individual intelligent vehicles, current AVs are limited by various factors and require human intervention during driving. Automatic driving cannot be fully realized as there are significant differences between automatic driving and personal manual driving habits, and driving comfort is usually poor.
- 2.
- Prediction of individual intelligent vehicle driving behavior on roads
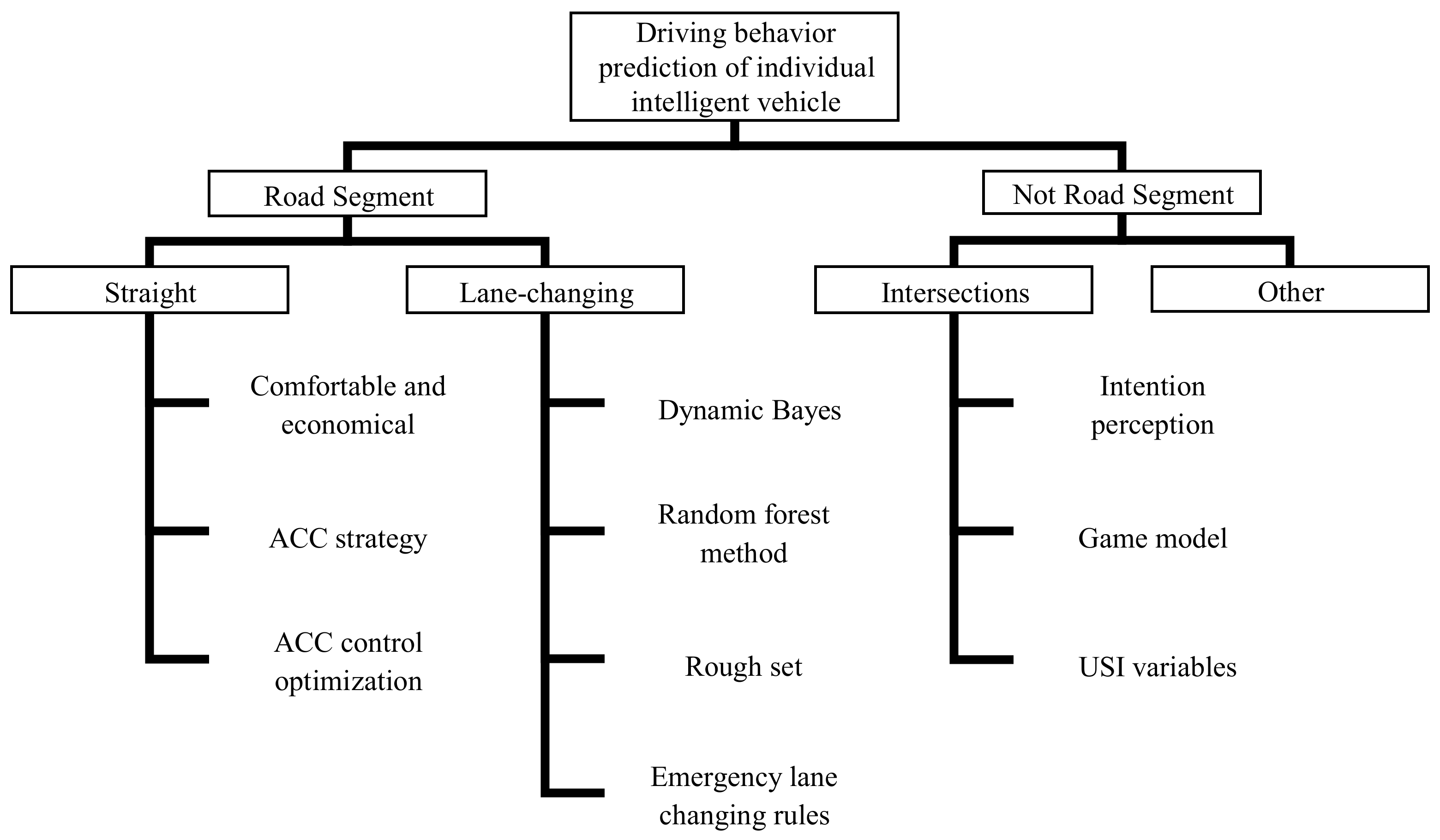
The research on ACC systems, as shown in Figure 2 and Table 2, utilizes car control strategies based on factors such as reaction time or distance to ensure safety by maintaining a safe distance from the vehicle ahead. However, reaction time and safe distance are different for different drivers. Consequently, it is difficult to calibrate ACC systems, resulting in poor performance indicators such as comfort. The application of deep reinforcement learning theory and the MPC framework in intelligent transportation systems can improve the intelligence of ACC systems. Notably, most current ACC systems focus on analyzing the impact of longitudinal traffic flow and ignore the impact of lateral vehicles in complex urban traffic environments.
Considering lane-changing behavior, as shown in Figure 2 and Table 2, current smart car lane-changing trajectory planning includes methods such as search, optimization, and functions. New methods, such as the hp-adaptive pseudospectral method and artificial intelligence, use functional methods to overcome hysteresis and the redundancy of existing methods. However, the problem of imperfect data still persists. Moreover, the influence of lateral vehicles and the relative speed of the obstacles ahead must be considered. The combination of rough sets can increase the generality of lane-changing control algorithms but has limitations in terms of its accuracy.
- 3.
- Prediction of individual intelligent vehicle driving behavior at intersections
Traffic automation of individual intelligent vehicles at intersections is a complex problem. This is primarily because the traffic complexity at intersections is much higher than that of ordinary road sections. In general, only the intelligent motion planning model embedded in the vehicle is used, and its efficiency and safety are yet to be investigated. Song et al. proposed an intersection driver-intention perception decision-making algorithm, and Cheng et al. proposed a game theory model to optimize the traffic perception of individual intelligent vehicles at intersections. However, independent and one-sided approaches cannot be used to solve the problems of individual intelligent vehicles, and manual intervention is still required.
The discussed studies in the second section are summarized in Table 3.
3. Research on IoV Driving Behavior Prediction
Tian Bin et al. [25] stated that cooperative vehicle infrastructure (CVI) and IoV are key technologies for overcoming the limitations of individual intelligence in AVs. The international standard for autonomous driving (ISAD) was proposed in 2019. This standard categorizes the facilities required to support autonomous driving into five levels, wherein the A-level defines roads that can enable autonomous driving, with AVs, roads, and traffic connected by ISAD. IoV technology has gradually transitioned from individual intelligent vehicles to vehicle-to-vehicle (V2V) communication, data distribution, and CVI. IoV technology enables the formation of an organic vehicle–road–person entity.
3.1. IoV Model Optimization
Considering the shortcomings of the individual intelligent vehicle motion models, Li et al. [26] stated that an IoV environment should not only include “individual intelligence” driving, but also share environmental perception and driving decision information with other IoV vehicles and intelligent roadside infrastructures. Accordingly, a collaborative decision-making mechanism can be adopted to realize “networked intelligence” operations. Zhao et al. [27] proposed a multimodal multitask spatial–temporal convolution (MM-STConv) end-to-end autonomous driving behavior decision model. It is based on RGB images, deep learning, and vehicle history data [28], and can better predict the trajectory of the vehicle ahead to control its own speed and turning angle.
3.2. Prediction of IoV Driving Behavior
3.2.1. Prediction of IoV Driving Behavior on Roads
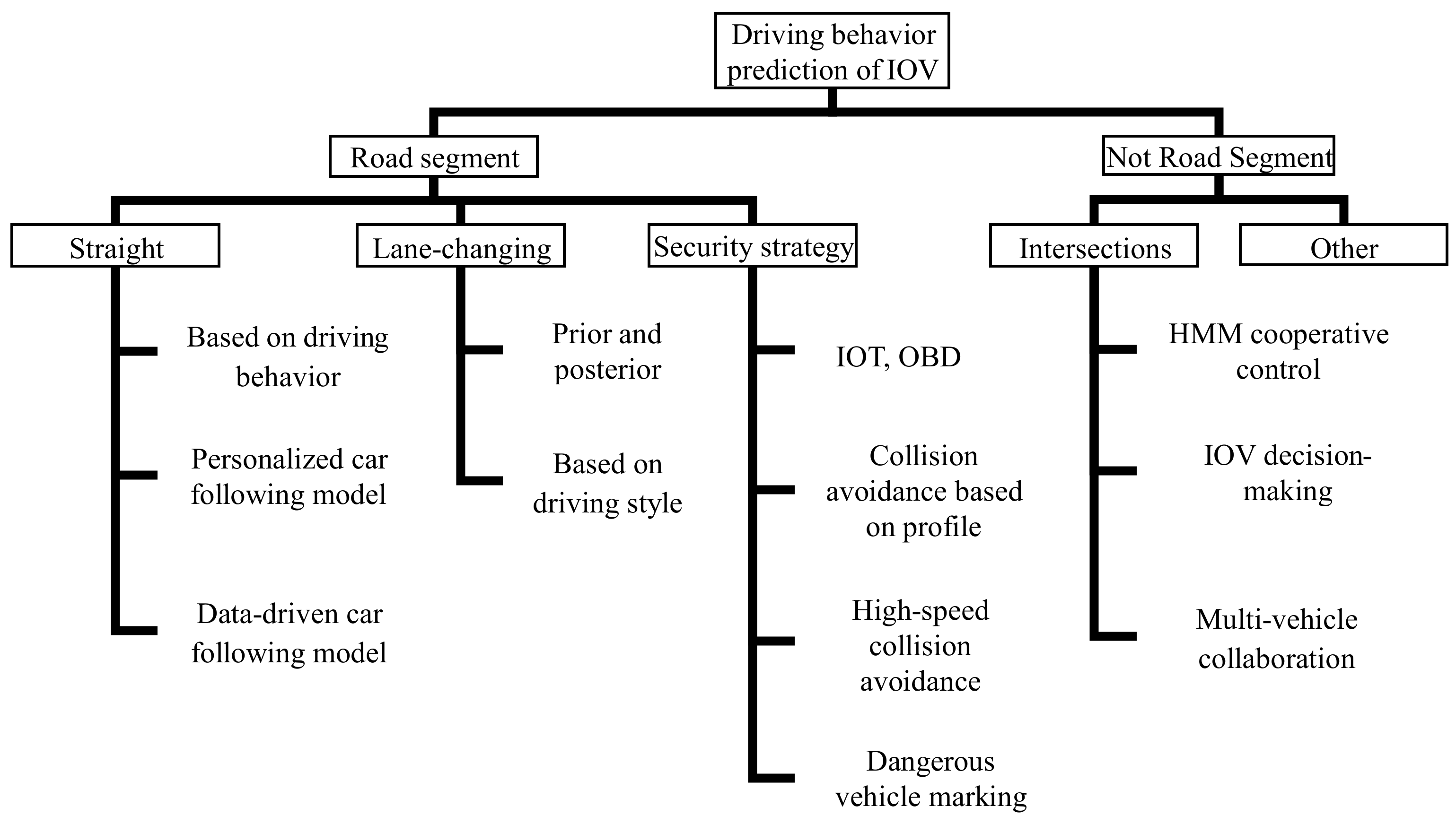
An ACC system can be further optimized by IoV. Su et al. [29] and Jin [30] proposed a car-following model based on ACC that considers the behavior of the driver and studied the relationship between the longitudinal traffic flow in an IoV driving environment. Yang et al. [31] further studied the potential of ACC in IoV environments based on the car-following model. They revealed that a data-driven car-following model in a big data environment can rapidly adapt to changes in driving behavior and provide important support for the development of AVs.
Geng et al. [32] proposed an automatic driving lane-changing motion planning and control algorithm based on a priori probability and a posteriori deterministic prediction. The status quo of the surrounding environment and possible dangerous behaviors are considered simultaneously to determine whether the vehicle stays in its current lane or changes lanes. Huang et al. [33] and Tejada et al. [34] proposed an intelligent vehicle lane-changing trajectory planning and control system considering different driving styles. Based on historical data, they defined three driving styles: aggressive, ordinary, and cautious. Drivers with different styles were found to have different requirements for the use of intelligent vehicles.
The emergence of IoV has improved the intelligence and personalization of lane-changing control in AVs, and new research has been conducted to ensure the safety of lane-changing behavior. Huang et al. [35] proposed a driver behavior analysis method based on the vehicle onboard diagnostic (OBD) information and AdaBoost algorithms. It can better determine whether the current driving behavior belongs to safe driving or not. Bussooa et al. [36] proposed a system to monitor drivers using the Internet of Things (IoT) technology and regulate their lane-changing behavior. Wu et al. [37] and Zhang et al. [38] established an intelligent vehicle collision avoidance model that can reduce the collision risk of AVs during lane-changing, considering different perspectives. Xue et al. [39] proposed a method to recognize dangerous driving behavior and provide a reference for the risks posed by surrounding vehicles.
3.2.2. Prediction of IoV Driving Behavior at Intersections
IoV removes the barriers between individual vehicles and between vehicles and infrastructure. The prediction of driving behavior at intersections is an important area of study in autonomous driving research.
Xiong et al. [40] proposed a method to predict the driving intentions of other vehicles based on the HMM, which controls the motion behavior of intelligent vehicles through a hybrid state system. This method realizes the interactive problem of vehicles on a highway ramp and verifies the cooperative control of unmanned vehicles at intersections. Based on the development of vehicle-to-infrastructure (V2I) and V2V communications and historical driving data, Song et al. [41] and Duan et al. [42] proposed a behavioral decision model for intelligent vehicles and multivehicle collaborative control at intersections.
3.3. Research Comments
- 1.
- IoV model optimization
The studies discussed in this section are summarized in Figure 3 and Table 4. These studies considered not only the influence of the driver of a single ICV on vehicle motion planning, but also the interactive influence of the decision-making of multiple ICVs. This represents a novel approach for the development of ICVs and fully autonomous driving technology. AVs cannot be completely individual intelligences, and each vehicle must be intelligent. Essentially, a system of “autonomous intelligence” + “connected intelligence” is required.
Considering the MM-STConv end-to-end autonomous driving behavior decision model proposed by Zhao et al., the introduction of deep learning and networked historical data can solve the problem of a lack of a priori probability. Currently, some models rely on images to a significant extent. Poor weather conditions, low ambient brightness at night, and the reflections of the vehicles ahead can result in poor prediction results.
- 2.
- Prediction of IoV driving behavior on roads
The application of car-following models and data-driven car-following models in intelligent transportation systems in IoV environments can increase the intelligence of ACC systems. These models are based on nonparametric methods (artificial intelligence, machine learning, deep learning, etc.) and can adapt to the complex driving environments and aggressive driving behavior in China, but they require a large amount of high-precision data as a sample dataset.
In contrast to independent real-time decision-making by individual intelligent vehicles, Geng et al. comprehensively considered the a priori probability of traffic rules, driving experience, and driver style and the HMM-based a posteriori probability to fully realize the advantages of IoV. This approach reduces the time required for behavior recognition and trajectory planning and improves the prediction accuracy. Based on the application of an intelligent rough set of individual intelligent vehicles, the consideration of driving personalization factors demonstrated by Huang et al. is important. The supplement of such factors not only realizes the personalized requirements of drivers with different driving styles, but also improves the algorithmic constraints on the basis of rough sets to ensure accurate control.
- 3.
- Prediction of IoV driving behavior at intersections
The intersection behavior decision model proposed by Song et al. and the multivehicle cooperative control model at intersections proposed by Duan et al. are considered as examples for further discussions. Using V2I and V2V technologies, the intersection traffic model can help AVs judge the traffic conditions of other vehicles at intersections and use dedicated short-range communication (DSRC) technology to realize multivehicle coordinated control at unsignalized intersections, which is in line with the development trend of coordinated vehicle–road development. The introduction of HMM, driver intention analysis, and other technologies can establish new research directions, enrich the research on autonomous driving at intersections, and improve the safety and comfort of driving behavior prediction in intermittent traffic flow.
As these models make driver judgments based on historical vehicle trajectory, without the influence of the other vehicles entering the intersection, the collected data are imperfect, and the judgment results have errors. Therefore, future research can use onboard networking equipment, sensors, and CAN or CIDAS data [43] to improve judgment accuracy.
4. Research on Predictive Problems in Mixed Traffic Driving Environments
4.1. Research on Automatic–Manual Mixed Traffic Flow
Existing research generally assumes that AVs have a high level of intelligence and actual road traffic consists of mixed traffic flow, with different types of vehicles (such as automatic–manual mixed traffic flow). The study of mixed traffic flow reveals the internal mechanism of real traffic and can help build more accurate and faster predictive models for AVs.
Research on mixed traffic flow comprising automatic and manual driving has gradually increased in recent years. Bose et al. [44] analyzed the influence of automatic–manual mixed traffic flow on the traffic flow characteristics and environment in a single lane. Subsequently, Ioannou et al. [45] analyzed same-scale automatic and manual driving traffic density maps and simulated the changing characteristics of mixed traffic flow. Huang et al. [46] proposed a method to enable the coexistence of AVs and manual vehicles, thereby reducing the cost of highway automation and infrastructure requirements. Qiu [47] proposed a traffic flow model for mixed flow with automatic and manual driving. Some scholars believe that if the proportion of intelligent vehicles reaches 80%, the traffic flow capacity would be twice that of fully manual driving, and traffic congestion would be reduced by 50% [48].
Research on mixed traffic flows has increased significantly in recent years. Qin et al. [49] analyzed the differences in traffic behavior between cooperative adaptive cruise control (CACC)/ACC vehicles and manually driven vehicles and combined their respective advantages and disadvantages to build a car-following model and establish a theoretical basis for heterogeneous traffic flow. Ye et al. [50,51,52,53] established a model for ICVs in mixed traffic flows based on a two-lane cellular automation model for heterogeneous traffic flows. Subsequently, they proposed a modeling method for ICVs based on the chart method and simulated the model considering factors such as density, speed, performance, and permeability.
4.2. Research Comments
As shown in Table 5, scholars have conducted extensive research on automatic–manual mixed traffic flow. Bose et al. and Ioannou et al. applied the Q-K diagram to illustrate that automated transportation improves transportation efficiency in a study on the importance of autonomous driving. Huang et al. proposed an autonomous vehicle driving system (AVDS) that only uses vehicle sensor information, thereby eliminating the need for communication between vehicles. This can help individual intelligence AVs to quickly enter the market, and it allows manual and automatic vehicles to coexist. Nevertheless, there are considerable shortcomings with individual intelligent vehicles, and communication between vehicles is necessary. Therefore, vehicles as part of an IoV system can better coexist with manual vehicles and individual intelligent vehicles.
From another perspective, the above research showed that disruptions from manual vehicles would obviate the advantages of AVs. Accordingly, heterogeneous traffic flow theory becomes significant due to the difficulty of completely eliminating manual driving in a short time, which may better coordinate the mixed traffic flow.
The above-mentioned research primarily analyzes automatic–manual mixed traffic flow considering driving safety and efficiency. However, some studies also consider the mutual influence mechanism of automatic and manual driving, especially in a mixed traffic flow in an IoV environment. Ye et al. and Qin et al. explored the theoretical basis of the interaction mechanism of heterogeneous traffic flows.
5. Conclusions
5.1. Shortcomings
Several studies and experiments related to vehicle automation, in areas such as individual intelligence AVs, IoV, AVs, and mixed traffic flow driving behavior prediction, have been conducted in recent years. These research efforts have yielded invaluable knowledge and data, which have promoted the development of AVs.
A systematic review of the existing research was performed herein, which revealed that most traditional individual intelligent vehicle behavior prediction models are only suitable for specific traffic scenarios and cannot adapt to complex scenarios, such as complex intersections. Although the individual intelligent vehicles manufactured by companies such as Tesla use advanced artificial intelligence and machine learning algorithms, driving in dynamically changing traffic conditions remains a significant challenge for individual intelligent vehicles, especially on city roads. The collaborative control of vehicles belonging to an IoV network can help AVs make more accurate behavior predictions and more reasonable trajectory planning. However, the current data collection, analysis, and arrangement methods are not systematic, and training and test datasets are quite poor. Consequently, IoV technology is not yet suitable for widespread adoption.
Existing driving control algorithms primarily set path tracking accuracy as the main control target, leading to the frequent starting and stopping of vehicles. Consequently, AVs are more likely to cause motion sickness compared to traditional vehicles. In addition, the short reaction times and following distances of AVs can increase the psychological pressure on persons driving traditional vehicles, creating additional traffic safety hazards. This is even more prominent in current driving environments with mixed traffic flows.
Considering the prejudgment of vehicle driving behavior, there are numerous limitations in the application of individual intelligent vehicles that require the cooperation of specific traffic environments, thereby preventing the development of fully autonomous vehicles. The combination of IoV and AVs has several advantages, but the available training datasets are not rich enough. Despite being integrated with decision-making processes, the application of driving behavior prediction remains a significant challenge. Mixed traffic flow has gradually become an important area of research. Nevertheless, theoretical and applied research is still relatively rare, and the comfort of autonomous driving in a mixed driving environment is still poor.
5.2. Prospects
- 1.
- Recognition of driving status based on vehicle files
Owing to the relationship between the personality traits of a driver and their driving behavior, IoV can be used to establish a priori logic that considers the personality of the driver, vehicle history, traffic rules, etc. When driving on the road, other ICVs can obtain this logic by scanning the license plates of neighboring vehicles using onboard cameras. The a priori probability of the driving behavior of the vehicles can be calculated, and the dynamic Bayesian network or random forest method can be used to calculate the a posteriori probability and provide efficient and accurate behavior prediction and trajectory planning.
IoV and CVI can fully exploit the advantages offered by big data; together with vehicle driving history data, they can be used to identify the type of driver and provide personalized automatic driving control. Furthermore, deep learning algorithms and neural networks can be used to simulate the driving of experienced drivers in AVs, such that that the trajectory of autonomous driving satisfies the requirements of different drivers. In mixed traffic flow environments, different motion planning models are required based on the driving conditions and vehicles ahead, considering the degree of driving anthropomorphism and ride comfort, to satisfy safety requirements.
- 2.
- Realization of fully autonomous driving based on all-element traffic information perception
The “Automotive Driving Automation Classification” was formally implemented in China on 1 January 2021. It divides driving automation into six levels, i.e., Levels 0–5. Level 0–2 autonomous driving requires the driver to take over dynamic driving tasks during the entire process. Level 3 represents conditional autonomous driving, which is already present in several high-end car models such as those produced by Mercedes-Benz, Honda, and Audi. The realization of Level 4 highly automated driving and Level 5 fully autonomous driving lies in achieving “autonomy”, which is the direction of current autonomous driving research efforts.
Based on large-scale, omnidirectional, and complete traffic information perception, AVs can realize scenario-adaptive driving behavior prediction by comprehensively considering traffic rules, driving experience, etc., using a trained motion planning model to predict the future behavior of surrounding vehicles, to realize autonomous driving.
In recent years, artificial intelligence has developed rapidly, and deep learning and neural networks have been increasingly used in various fields, including transportation. An all-element traffic information perception system can collect a large amount of credible traffic data in a short duration of time, provide rich training datasets for machine learning, and provide accurate and high-quality big data for intelligent driving behavior decision-making systems based on learning algorithms. Convolutional neural networks, machine learning, deep reinforcement learning, and other algorithms can be applied to AVs, allowing them to perform intelligent learning, forming a virtuous circle, and eventually achieving intelligent, highly autonomous driving or even fully autonomous driving.
- 3.
- Virtual simulation experiments
Although an actual vehicle test can provide more realistic results, simulation experiments still offer the advantages of convenience and speed. Considering the authenticity of a training scene, a more realistic traffic problem can be established at the micro level by developing an abstract driving framework that captures the details of human driving, thereby ensuring that various types of complex anthropomorphic driving behaviors are employed in simulation experiments. The controller can be trained using game engines, such as Grand Theft Auto V (GTAV), combined with deep learning, to reduce the collection of actual sample data. After correction and optimization, the controller can be applied to real-world environments to achieve lane-keeping control.
- 4.
- Prediction of driving behavior in mixed traffic flows
The application of IoV can enable the realization of V2X multiterminal interactive communications. Consequently, behavior prediction between AVs can be more inclined toward using big data, CVI, IoV, deep learning algorithms, etc., to solve prediction problems. However, as manual vehicles still dominate the roads, manual–automatic mixed traffic flow environments will continue to exist for a long time.
In addition, according to current technological development trends and market penetration levels, highly digital and intelligent AVs are difficult to realize in a short period of time. Therefore, research on predictive problems in mixed traffic driving environments with different levels of intelligent connectivity is necessary. Moreover, this is a problem not only for automatic–manual mixed traffic flows, but also between traditional vehicles without intelligence, individual intelligent vehicles, and ICVs of different intelligence levels in an IoV environment. For a new ICV, vehicles can achieve interconnections with other vehicles with the same level of intelligent connectivity. However, for vehicles with other levels, they must be converted to individual intelligent identification and prediction systems. Currently, there is little research on this problem.
- 5.
- Autonomous “agents”
An autonomous “agent” may be another form of artificial intelligence technology in AVs, but its use is more like putting a mechanical brain into the AV. This means that AVs are not only autonomous but also capable of learning to improve their own understanding of the world.
The driving brain should have the following functions: (1) accomplishing driving tasks independently and safely in various complex environments; (2) continuously learning and updating, performing natural social behaviors and driving behaviors of human beings, which may help in the process of decision-making in an environment where there are multiple autonomous vehicles (or even non-autonomous vehicles); (3) sounding an alarm when security cannot be guaranteed.
However, autonomous “agents” may face enormous legal and ethical issues. On the one hand, the behavior of autonomous “agents” is highly unpredictable. There are concerns about their intelligence level being too low or too high or too. Judgments of accident liability also are cause for concern. After all, it is absurd to convict an AI.
Author Contributions
Conceptualization, X.H. and M.Z.; methodology, X.H. and M.Z.; software, X.H.; validation, X.H. and M.Z.; formal analysis, X.H. and M.Z.; investigation, M.Z.; resources, X.H.; data curation, X.H.; writing—original draft preparation, X.H. and M.Z.; writing—review and editing, X.H.; visualization, X.H. and M.Z.; supervision, X.H.; project administration, X.H.; funding acquisition, X.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ranney, T.A. Models of driving behavior: A review of their evolution. Pergamon 1994, 26, 733–750. [Google Scholar] [CrossRef]
- Mamidi, K.K.; Kamakshi, V.; Driver, P. Behavior Analysis and Prediction Models: A Survey. Int. J. Comput. Sci. Inf. Technol. 2015, 6, 3328–3333. [Google Scholar]
- Xiong, L.; Kang, Y.; Zhang, P.; Zhu, C.; Yu, Z. Research on Behavior Decision-Making System for Unmanned Vehicle. Automob. Technol. 2018, 8, 1–9. [Google Scholar]
- Chen, T.; Chen, Y.; Deng, G.; Wei, L. Review of driver behavior models. J. Chang. Univ. 2016, 36, 80–90. [Google Scholar]
- Berndt, H.; Emmert, J.; Dietmayer, K. Continuous Driver Intention Recognition with Hidden Markov Models. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 1189–1194. [Google Scholar]
- Zhu, L.; Liu, L.; Zhao, X.; Yang, D. Driver Behavior Recognition Based on Support Vector Machine. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 91–97. [Google Scholar]
- Zhang, L.; Tan, B.; Liu, T.; Zhang, T.; Li, J. Research on recognition of dangerous driving behavior based on support vector machine. In Proceedings of the 12th International Conference on Graphics and Image Processing, Xi’an, China, 13–15 November 2020; pp. 1172–1180. [Google Scholar]
- Liu, Z.; Wu, X.; Ni, J.; Zhang, T. Driving Intention Recognition Based on HMM and SVM Cascade Algorithm. Automot. Eng. 2018, 40, 858–864. [Google Scholar]
- Zong, C.; Yang, X.; Wang, C.; Zhang, G. Driving intentions identification and behaviors prediction in car lane change. J. Jilin Univ. 2009, 39, 27–32. [Google Scholar]
- Zhang, Y.; Li, J.; Guo, Y.; Xu, C.; Bao, J.; Song, Y. Vehicle Driving Behavior Recognition Based on Multi-View Convolutional Neural Network (MV-CNN) with Joint Data Augmentation. IEEE Trans. Veh. Technol. 2019, 68, 4223–4234. [Google Scholar] [CrossRef]
- Ning, Y.; Ying, Y.Z.; Wang, R. Vehicle trajectory prediction based on Hidden Markov Model. KSII Trans. Internet Inf. Syst. 2016, 10, 3150–3170. [Google Scholar]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mech. Syst. Signal Process. 2018, 100, 482–500. [Google Scholar] [CrossRef]
- Ji, X.; Fei, C.; He, X. Intention Recognition and Trajectory Prediction for Vehicles Using LSTM Network. China J. Highw. Transp. 2019, 32, 34–42. [Google Scholar]
- Zhu, M.; Chen, H. Strategy for Vehicle Adaptive Cruise Control Considering the Reaction Headway. J. Mech. Eng. 2017, 53, 144–150. [Google Scholar] [CrossRef]
- Zhu, B.; Jiang, Y.; Zhao, J.; Chen, H.; Deng, W. A Car-following Control Algorithm Based on Deep Reinforcement Learning. China J. Highw. Transp. 2019, 32, 53–60. [Google Scholar]
- Luo, L.; Liu, H.; Li, P. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. Zhejiang Univ. Sci. A 2009, 11, 191–201. [Google Scholar] [CrossRef]
- Chen, X.; Tian, G.; Miao, Y.; Gong, J. Driving Rule Acquisition and Decision Algorithm to Unmanned Vehicle in Urban Traffic. Trans. Beijing Inst. Technol. 2017, 37, 491–496. [Google Scholar]
- Jiang, H.; Shi, K.; Hua, Y.; Chen, L. Lane-changing Trajectory Planning and Optimization for Intelligent Vehicle Through hp-adaptive Pseudospectral Method. China J. Highw. Transp. 2019, 32, 71–78. [Google Scholar]
- Schreier, M.; Willert, V.; Adamy, J. Bayesian, Maneuver-Based, Long-Term Trajectory Prediction and Criticality Assessment for Driver Assistance Systems. In Proceedings of the 2014 17th IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2018; pp. 334–341. [Google Scholar]
- Kumagai, T.; Akamatsu, M. Prediction of human driving behavior using dynamic Bayesian networks. IEICE Trans. Inf. Syst. 2006, 2, 857–861. [Google Scholar] [CrossRef]
- Schlechtriemen, J.; Wirthmueller, F.; Wedel, A. When will it change the lane? A probabilistic regression approach for rarely occurring events. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, South Korea, 28 June–1 July 2015; pp. 1373–1379. [Google Scholar]
- Song, W.; Xiong, G.; Chen, H. Intention-Aware Autonomous Driving Decision-Making in an Uncontrolled Intersection. Math. Probl. Eng. 2016, 2016, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.; Gao, L.; Chen, X.; Zhao, Y. A Driving Game Model for Manned and Unmanned Vehicles at Intersection. Trans. Beijing Inst. Technol. 2019, 39, 938–943. [Google Scholar]
- Yang, S.; Wang, W.; Jiang, Y.; Wu, J.; Zhang, S.; Deng, W. What contributes to driving behavior prediction at unsignalized intersections? Transp. Res. Part C Emerg. Technol. 2019, 108, 100–114. [Google Scholar] [CrossRef]
- Tian, B.; Zhao, X.; Xu, Z.; Wang, M.; Zhang, Y. NRT-V2X: Adaptive Data Dissemination Protocol for Traffic Efficiency of Connected and Automated Highways. China J. Highw. Transp. 2019, 32, 293–307. [Google Scholar]
- Li, L.; Xu, Z.; Zhao, X.; Wang, G. Review of Motion Planning Methods of Intelligent Connected Vehicles. China J. Highw. Transp. 2019, 32, 20–33. [Google Scholar]
- Zhao, X.; Lian, X.; Liu, Z.; Shen, C.; Dong, M. End-to-end Autonomous Driving-behavior Decision Model Based on MM-STConv. China J. Highw. Transp. 2020, 33, 170–183. [Google Scholar]
- Qi, H.; Zhao, X.; Wu, Y.; Liu, C. A Graph Based Security Description Method of Driving Behavior Characteristics. In Proceedings of the 20th COTA International Conference of Transportation Professionals: Transportation Evolution Impacting Future Mobility, CICTP 2020, Xi’an, China, 14–16 August 2020; pp. 4254–4265. [Google Scholar]
- Su, C.; Deng, W.; He, R.; Wu, J.; Jiang, Y. Personalized Adaptive Cruise Control Considering Drivers’ Characteristics. SAE Tech. Pap. 2018, 1, 591–603. [Google Scholar]
- Jin, J. Research on Improved Car-following Based on ACC System. Sci. Technol. Eng. 2011, 11, 6396–6400. [Google Scholar]
- Yang, L.; Zhang, C.; Qiu, X.; Li, S.; Wang, H. Research progress on car-following models. J. Traffic Transp. Eng. 2019, 19, 125–138. [Google Scholar]
- Geng, X.; Liang, H.; Yu, B. A Scenario-Adaptive Driving Behavior Prediction Approach to Urban Autonomous Driving. Appl. Sci. 2017, 7, 426. [Google Scholar] [CrossRef]
- Huang, J.; Ji, Z.; Peng, X.; Hu, L. Driving Style Adaptive Lane-changing Trajectory Planning and Control. China J. Highw. Transp. 2019, 32, 226–239. [Google Scholar]
- Tejada, A.; Manders, J.; Snijders, R.; Paardekooper, J.; De, S. Towards a Characterization of Safe Driving Behavior for Automated Vehicles Based on Models of ‘Typical’ Human Driving Behavior. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, ITSC 2020, Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Chen, S.; Pan, J.; Lu, K. Driving Behavior Analysis Based on Vehicle OBD Information and AdaBoost Algorithms. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 21–23 October 2020; Volume 1, pp. 102–106. [Google Scholar]
- Bussooa, A.; Mungur, A. Driving Behaviour Analysis Using IoT. In Proceedings of the 2019 IEEE International Conference on Systems, Man, and Cybernetics, Budapest, Hungary, 6–9 October 2019; pp. 3258–3263. [Google Scholar]
- Wu, M.; Xu, T.; Liu, J.; Zhao, C.; Gao, J.; Li, Z. Instantaneous Prediction of Vehicle Outline Conflict Using High-frequency and High-precision Position Information. China J. Highw. Transp. 2019, 32, 105–113. [Google Scholar]
- Zhang, Y.; Zhou, B.; Wu, X.; Cui, Q.; Cai, T. Motion Planning of High Speed Intelligent Vehicle Based on Front Vehicle Trajectory Prediction. Automot. Eng. 2020, 42, 574–580. [Google Scholar]
- Xue, Q.; Jiang, Y.; Lu, J. Risky Driving Behavior Recognition Based on Trajectory Data. China J. Highw. Transp. 2020, 33, 84–94. [Google Scholar]
- Xiong, G.; Li, Y.; Wang, S. Behavior Prediction and Control Method Based on FSM for Intelligent Vehicles in an Intersection. Trans. Beijing Inst. Technol. 2015, 35, 34–38. [Google Scholar]
- Song, W.; Xiong, G.; Wang, S.; Chen, H. Decision Making for Intelligent Vehicles Based on Driver Type Analyzing in an Intersection. Trans. Beijing Inst. Technol. 2016, 36, 917–922. [Google Scholar]
- Duan, M.; Yu, W.; Liu, Z. Research on Multi-Vehicle Cooperative Control of Unmanned Vehicle at Intersection. Automot. Technol. 2020, 4, 33–39. [Google Scholar]
- Hu, L.; Bao, X.; Lin, M.; Yu, C.; Wang, F. Research on risky driving behavior evaluation model based on CIDAS real data. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2176–2187. [Google Scholar] [CrossRef]
- Bose, A.; Ioannou, P. Analysis of traffic flow with mixed manual and semi-automated vehicles. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 2173–2177. [Google Scholar]
- Bose, A.; Ioannou, P. Mixed manual/semi-automated traffic: A macroscopic analysis. Transp. Res. Part C Emerg. Technol. 2003, 11, 439–462. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Ren, W.; Chan, S. Design and performance evaluation of mixed manual and automated control traffic. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 661–673. [Google Scholar] [CrossRef]
- Qiu, X.; Ma, L.; Zhou, X.; Yang, D. The Mixed Traffic Flow of Manual-automated Driving Based on Safety Distance. J. Transp. Syst. Eng. Inf. Technol. 2016, 16, 101–108. [Google Scholar]
- Xu, T.; Wen, C.; Zhang, X.; Li, B.; Wang, J.; Zhang, Y. Lane Changing Behavior Identification of Urban Road Based on GMM-CHMM. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 61–67. [Google Scholar]
- Qin, Y.; Wang, H.; Wang, W.; Ni, D. Review of car-following models of adaptive cruise control. J. Traffic Transp. Eng. 2017, 17, 121–130. [Google Scholar]
- Ye, L.; Yamamoto, T. Modeling Connected and Autonomous Vehicles in Heterogeneous Traffic Flow. Phys. A Stat. Mech. Its Appl. 2017, 490, 269–277. [Google Scholar] [CrossRef]
- Ye, L.H.; Yamamoto, T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Phys. Stat. Mech. Its Appl. 2018, 512, 588–597. [Google Scholar] [CrossRef]
- Ye, L.H.; Yamamoto, T. Evaluating the impact of connected and autonomous vehicles on traffic safety. Phys. A Stat. Mech. Its Appl. 2019, 526, 357–365. [Google Scholar] [CrossRef]
- Ye, L.H.; Yamamoto, T.; Morikawa, T. Heterogeneous Traffic Flow Dynamics under Various Penetration Rates of Connected and Autonomous Vehicle. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems, New York, NY, USA, 4–7 November 2018; pp. 555–559. [Google Scholar]
Figure 1.
Research course of motion planning model of individual intelligence.

Figure 2.
Structure chart of driving behavior prediction of individual intelligent vehicles.

Figure 3.
Structure chart of IoV driving behavior prediction.


{kind=link}
{kind=link}
{kind=link}
Table 1.
Research summary of motion planning models for individual intelligent vehicles.
| Research Objective | Author | Year | Opinion or Model |
|---|---|---|---|
| Review | Thomas [1] | 1994 | Emphasized the importance of driving behavior analysis |
| Kumar et al. [2] | 2015 | Driver behavior models significantly differ for different vehicle drivers | |
| Chen et al. [4] | 2016 | Believed that functional models are superior to descriptive models | |
| Xiong et al. [3] | 2018 | Based on the potential of the learning algorithm model | |
| Intent recognition | Berndt [5] | 2008 | Used HMM to recognize driving intention |
| Zhu et al. [6] | 2017 | Recognition method of driving behavior based on SVM | |
| Liu et al. [8] | 2018 | HMM and SVM | |
| Zong et al. [9] | 2009 | Proposed HMM and ANN driver behavior prediction models | |
| Zhang et al. [10] | 2019 | MV-CNN has better generalization ability than ANN | |
| Zhang et al. [7] | 2021 | SVM optimization | |
| Trajectory prediction | Ye et al. [11] | 2016 | Established dynamic model to predict vehicle trajectory |
| Hu et al. [12] | 2018 | AV path planning method based on discrete optimization | |
| Ji et al. [13] | 2019 | Vehicle trajectory prediction model based on LSTM |
Table 2.
Research summary of driving behavior prediction of individual intelligent vehicles.
| Research Objective | Author | Year | Opinion or Model |
|---|---|---|---|
| Straight | Luo et al. [16] | 2009 | Improve driving comfort and fuel economy |
| Zhu et al. [14] | 2017 | ACC strategy based on response time | |
| Zhu et al. [15] | 2019 | ACC car-following control optimization | |
| Lane-changing | Schreier et al. [19] Toru et al. [20] | 2014 | Lane-changing probability of dynamic Bayesian network |
| Schlechtriemen et al. [21] | 2015 | Prediction of lane-changing based on random forest method | |
| Chen et al. [17] | 2017 | Combining rough set urban environment lane-changing rules | |
| Jiang et al. [18] | 2019 | Autonomous driving emergency lane-changing rules | |
| Intersections | Song et al. [22] | 2016 | Intention perception of driver at intersection |
| Cheng et al. [23] | 2019 | Intersection driving game model | |
| Yang et al. [24] | 2019 | USI multiple impact variables |
Table 3.
Research summary of individual intelligent vehicle driving behavior prediction.
| Chapter | Research Objective | Summary | Author/Year | |
|---|---|---|---|---|
| Individual intelligent vehicle motion-planning model | Review | Reviewed and analyzed driving behavior models from different perspectives | Thomas/1994 [1] Kumar et al./2015 [2] Chen et al./2016 [4] Xiong et al./2018 [3] | |
| Intent recognition | The introduction of machine learning and other technologies to intelligent vehicle control | Berndt/2008 [5] Zhu et al./2017 [6] Liu et al./2018 [8] Zong et al./2009 [9] Zhang et al./2019 [10] Zhang et al./2021 [7] | ||
| Trajectory prediction | Ye et al./2016 [11] Hu et al./2018 [12] Ji et al./2019 [13] | |||
| Prediction of individual intelligent vehicle behavior recognition | On-road | Straight | Development and optimization of ACC | Luo et al./2009 [16] Zhu et al./2017 [14] Zhu et al./2019 [15] |
| Lane-changing | Safe and reliable lane-changing control systems are needed | Schreier et al./2014 [19] Toru et al./2014 [20] Schlechtriemen et al./2015 [21] Chen et al./2017 [17] Jiang et al./2019 [18] | ||
| At intersections | Its efficiency and safety are yet to be investigated | Song et al./2016 [22] Cheng et al./2019 [23] Yang et al./2019 [24] | ||
Table 4.
Research summary of IoV driving behavior prediction.
| Research Objective | Author | Year | Opinion or Model |
|---|---|---|---|
| Straight | |||
| ACC car-following model | Jin [30] | 2011 | Car-following model based on driver behavior |
| Su et al. [29] | 2018 | Personalized car-following model | |
| Yang et al. [31] | 2019 | Data-driven car-following model | |
| Lane-changing | |||
| Lane-changing intention | Geng et al. [32] | 2015 | A priori and a posteriori lane-changing prediction |
| Huang et al. [33] | 2019 | Trajectory planning and control based on driving style | |
| Tejada et al. [34] | 2020 | Based on models of ‘typical’ human driving behavior | |
| Lane-changing safety | Huang et al. [35] | 2015 | Behavior analysis method based on OBD |
| Bussooa et al. [36] | 2019 | Monitoring illegal lane-changing behavior using IoT | |
| Wu et al. [37] | 2019 | Collision avoidance model based on vehicle contour | |
| Zhang et al. [38] | 2020 | AV high-speed collision avoidance model | |
| Xue et al. [39] | 2020 | Dangerous vehicle marking | |
| Intersections | |||
| Intersection cooperative control | Xiong et al. [40] | 2014, 2015 | Intersection cooperative control method based on HMM |
| Song et al. [41] | 2016 | Decision-making model for intersection behavior | |
| Duan et al. [42] | 2020 | Multivehicle cooperative control based on V2I and V2V intersections | |
Table 5.
Research summary of IoV driving behavior prediction.
| Author | Year | Opinion or Model |
|---|---|---|
| Bose et al. [44] | 1999 | Automatic–manual mixed traffic flow characteristics in a single lane |
| Huang et al. [46] | 2000 | Coexistence of AVs and manual vehicles |
| Ioannou et al. [45] | 2003 | Analyzed and studied automatic and manual driving Q-K diagrams |
| Qiu et al. [47] | 2016 | Mixed traffic flow model |
| Ye et al. [50,51,52,53] | 2018 | ICV modeling method in mixed traffic flow |
| Qin et al. [49] | 2019 | Car-following model of heterogeneous traffic flow |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hu, X.; Zheng, M. Research Progress and Prospects of Vehicle Driving Behavior Prediction. World Electr. Veh. J. 2021, 12, 88. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12020088
AMA Style
Hu X, Zheng M. Research Progress and Prospects of Vehicle Driving Behavior Prediction. World Electric Vehicle Journal. 2021; 12(2):88. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12020088
Chicago/Turabian StyleHu, Xinghua, and Mintanyu Zheng. 2021. "Research Progress and Prospects of Vehicle Driving Behavior Prediction" World Electric Vehicle Journal 12, no. 2: 88. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12020088