Potentialities of Vehicle Trajectory Big Data for Monitoring Potentially Fatigued Drivers and Explaining Vehicle Crashes on Motorway Sections


Abstract
:1. Introduction
2. Method
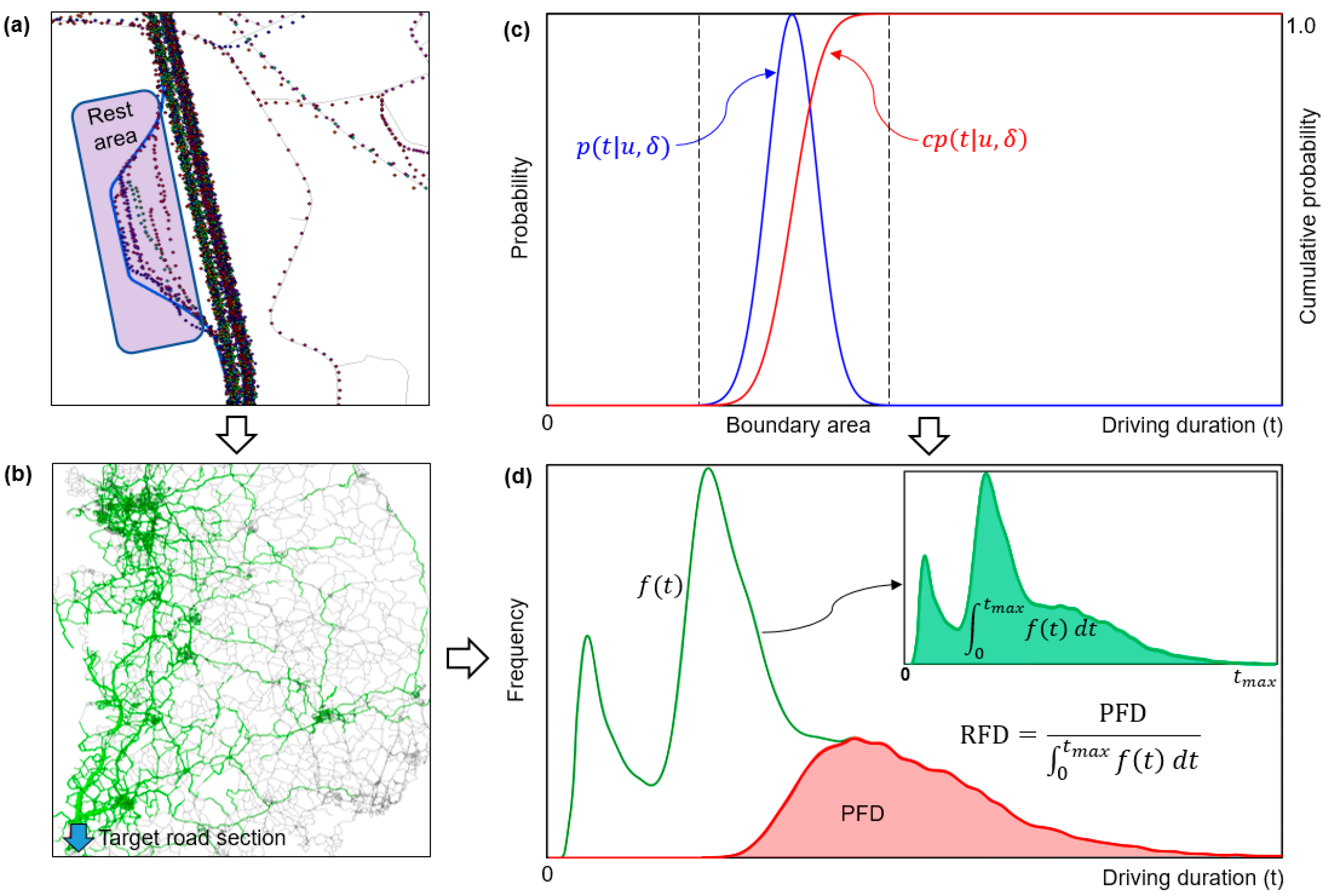
2.1. Approach Concept
2.2. Measurement of Potentially Fatigued Drivers
3. Application and Potentialities
3.1. Data and Characteristics
3.2. Identifying the Optimal Boundary Condition and Findings
3.3. Potentialities and Findings
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Larue, G.S.; Rakotonirainy, A.; Pettitt, A.N. Driving performance impairments due to hypovigilance on monotonous roads. Accid. Anal. Prev. 2011, 43, 2037–2046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Ma, D.; Zhu, M.; Zeng, Z.; Wang, Y. Identification of significant factors in fatal-injury highway crashes using genetic algorithm and neural network. Accid. Anal. Prev. 2018, 111, 354–363. [Google Scholar] [CrossRef] [PubMed]
- Haghighi, N.; Liu, X.C.; Zhang, G.; Porter, R.J. Impact of roadway geometric features on crash severity on rural two-lane highways. Accid. Anal. Prev. 2018, 111, 34–42. [Google Scholar] [CrossRef] [PubMed]
- Hong, J.; Tamakloe, R.; Park, D. A Comprehensive Analysis of Multi-Vehicle Crashes on Expressways: A Double Hurdle Approach. Sustainability 2019, 11, 2782. [Google Scholar] [CrossRef] [Green Version]
- WHO. Global Status Report on Road Safety 2015; WHO: Geneva, Switzerland, 2015. [Google Scholar]
- Lee, D.; Guldmann, J.-M.; von Rabenau, B. Interactions between the built and socio-economic environment and driver demographics: Spatial econometric models of car crashes in the Columbus Metropolitan Area. Int. J. Urban Sci. 2018, 22, 17–37. [Google Scholar] [CrossRef]
- Kim, D.-G.; Lee, Y. Identifying the influences of demographic characteristics and personality of inveterate drunk drivers on the likelihood of driving under the influence of alcohol (DUIA) recurrence. Int. J. Urban Sci. 2017, 21, 300–311. [Google Scholar] [CrossRef]
- Hong, J.; Tamakloe, R.; Park, D. Application of association rules mining algorithm for hazardous materials transportation crashes on expressway. Accid. Anal. Prev. 2020, 142, 105497. [Google Scholar] [CrossRef]
- Williamson, A.M.; Feyer, A.-M.; Friswell, R. The impact of work practices on fatigue in long distance truck drivers. Accid. Anal. Prev. 1996, 28, 709–719. [Google Scholar] [CrossRef]
- Lal, S.K.L.; Craig, A. A critical review of the psychophysiology of driver fatigue. Biol. Psychol. 2001, 55, 173–194. [Google Scholar] [CrossRef]
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef]
- Horne, J.A.; Reyner, L.A. Sleep related vehicle accidents. BMJ 1995, 310, 565–567. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pack, A.I.; Pack, A.M.; Rodgman, E.; Cucchiara, A.; Dinges, D.F.; Schwab, C.W. Characteristics of crashes attributed to the driver having fallen asleep. Accid. Anal. Prev. 1995, 27, 769–775. [Google Scholar] [CrossRef]
- Philip, P.; Ghorayeb, I.; Stoohs, R.; Menny, J.C.; Dabadie, P.; Bioulac, B.; Guilleminault, C. Determinants of sleepiness in automobile drivers. J. Psychosom. Res. 1996, 41, 279–288. [Google Scholar] [CrossRef]
- Mitler, M.M.; Miller, J.C.; Lipsitz, J.J.; Walsh, J.K.; Wylie, C.D. The Sleep of Long-Haul Truck Drivers. N. Engl. J. Med. 1997, 337, 755–762. [Google Scholar] [CrossRef] [PubMed]
- Sagberg, F. Road accidents caused by drivers falling asleep. Accid. Anal. Prev. 1999, 31, 639–649. [Google Scholar] [CrossRef]
- Ting, P.-H.; Hwang, J.-R.; Doong, J.-L.; Jeng, M.-C. Driver fatigue and highway driving: A simulator study. Physiol. Behav. 2008, 94, 448–453. [Google Scholar] [CrossRef]
- Davenne, D.; Lericollais, R.; Sagaspe, P.; Taillard, J.; Gauthier, A.; Espié, S.; Philip, P. Reliability of simulator driving tool for evaluation of sleepiness, fatigue and driving performance. Accid. Anal. Prev. 2012, 45, 677–682. [Google Scholar] [CrossRef]
- Sagaspe, P.; Taillard, J.; Åkerstedt, T.; Bayon, V.; Espié, S.; Chaumet, G.; Bioulac, B.; Philip, P. Extended Driving Impairs Nocturnal Driving Performances. PLoS ONE 2008, 3, e3493. [Google Scholar] [CrossRef]
- Horne, J.A.; Baulk, S.D. Awareness of sleepiness when driving. Psychophysiology 2004, 41, 161–165. [Google Scholar] [CrossRef]
- Williamson, A.; Lombardi, D.A.; Folkard, S.; Stutts, J.; Courtney, T.K.; Connor, J.L. The link between fatigue and safety. Accid. Anal. Prev. 2011, 43, 498–515. [Google Scholar] [CrossRef]
- Philip, P.; Taillard, J.; Guilleminault, C.; Quera, S.; Bioulac, B.; Ohayon, M. Long Distance Driving and Self–Induced Sleep Deprivation among Automobile Drivers. Sleep 1999, 22, 475–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Philip, P. Fatigue, alcohol, and serious road crashes in France: Factorial study of national data. BMJ 2001, 322, 829–830. [Google Scholar] [CrossRef] [Green Version]
- Garbarino, S.; Lino, N.; Beelke, M.; Carli, F.D.; Ferrillo, F. The Contributing Role of Sleepiness in Highway Vehicle Accidents. Sleep 2001, 24, 201–206. [Google Scholar] [CrossRef] [Green Version]
- Lumley, M.; Roehrs, T.; Asker, D.; Zorick, F.; Roth, T. Ethanol and Caffeine Effects on Daytime Sleepiness/Alertness. Sleep 1987, 10, 306–312. [Google Scholar] [PubMed]
- Hack, M.A.; Choi, S.J.; Vijayapalan, P.; Davies, R.J.O.; Stradling, J.R. Comparison of the effects of sleep deprivation, alcohol and obstructive sleep apnoea (OSA) on simulated steering performance. Respir. Med. 2001, 95, 594–601. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wesensten, N.; Belenky, G.; Kautz, M.A.; Thorne, D.R.; Reichardt, R.M.; Balkin, T.J. Maintaining alertness and performance during sleep deprivation: Modafinil versus caffeine. Psychopharmacology 2002, 159, 238–247. [Google Scholar] [CrossRef] [PubMed]
- Guo, M.; Li, S.; Wang, L.; Chai, M.; Chen, F.; Wei, Y. Research on the Relationship between Reaction Ability and Mental State for Online Assessment of Driving Fatigue. Int. J. Environ. Res. Public Health 2016, 13, 1174. [Google Scholar] [CrossRef]
- May, J.F.; Baldwin, C.L. Driver fatigue: The importance of identifying causal factors of fatigue when considering detection and countermeasure technologies. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 218–224. [Google Scholar] [CrossRef]
- Lal, S.K.L.; Craig, A.; Boord, P.; Kirkup, L.; Nguyen, H. Development of an algorithm for an EEG-based driver fatigue countermeasure. J. Saf. Res. 2003, 34, 321–328. [Google Scholar] [CrossRef]
- Lal, S.K.L.; Craig, A. Reproducibility of the spectral components of the electroencephalogram during driver fatigue. Int. J. Psychophysiol. 2005, 55, 137–143. [Google Scholar] [CrossRef]
- Jap, B.T.; Lal, S.; Fischer, P.; Bekiaris, E. Using EEG spectral components to assess algorithms for detecting fatigue. Expert Syst. Appl. 2009, 36, 2352–2359. [Google Scholar] [CrossRef]
- Eoh, H.J.; Chung, M.K.; Kim, S.H. Electroencephalographic study of drowsiness in simulated driving with sleep deprivation. Int. J. Ind. Ergon. 2005, 35, 307–320. [Google Scholar] [CrossRef]
- Ranney, T.A.; Simmons, L.A.; Masalonis, A.J. Prolonged exposure to glare and driving time: Effects on performance in a driving simulator. Accid. Anal. Prev. 1999, 31, 601–610. [Google Scholar] [CrossRef]
- Kecklund, G.; Åkerstedt, T. Sleepiness in long distance truck driving: An ambulatory EEG study of night driving. Ergonomics 1993, 36, 1007–1017. [Google Scholar] [CrossRef] [PubMed]
- Lal, S.K.L.; CRAIG, A. Driver fatigue: Electroencephalography and psychological assessment. Psychophysiology 2002, 39, S0048577201393095. [Google Scholar] [CrossRef]
- Dinges, D.F.; Mallis, M.M.; Maislin, G.; Powell, J.W. Evaluation of Techniques for Ocular Measurement as an Index of Fatigue and the Basis of Alertness Management; Report for NHTSA; NHTSA: Washington, DC, USA, 1998.
- Oron-Gilad, T.; Ronen, A.; Shinar, D. Alertness maintaining tasks (AMTs) while driving. Accid. Anal. Prev. 2008, 40, 851–860. [Google Scholar] [CrossRef]
- Pour-Rouholamin, M.; Jalayer, M.; Zhou, H. Modelling single-vehicle, single-rider motorcycle crash injury severity: An ordinal logistic regression approach. Int. J. Urban Sci. 2017, 21, 344–363. [Google Scholar] [CrossRef]
- Hong, J.; Tamakloe, R.; Park, D. Discovering Insightful Rules among Truck Crash Characteristics using Apriori Algorithm. J. Adv. Transp. 2020, 2020, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.; Cheon, S. The potential use of big vehicle-GPS data for estimations of annual average daily traffic for unmeasured road segments. Transportation 2019, 46, 1011–1032. [Google Scholar] [CrossRef]
- Chang, H.; Yoon, B. Potentialities of Autonomous Vehicles for Online Monitoring of Motorway Traffic Volume. J. Adv. Transp. 2018, 2018, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Gillberg, M.; Kecklund, G.; Åkerstedt, T. Sleepiness and performance of professional drivers in a truck simulator—Comparisons between day and night driving. J. Sleep Res. 1996, 5, 12–15. [Google Scholar] [CrossRef] [PubMed]
- Yamakoshi, T.; Rolfe, P.; Yamakoshi, Y.; Hirose, H. A novel physiological index for Driver’s Activation State derived from simulated monotonous driving studies. Transp. Res. Part C Emerg. Technol. 2009, 17, 69–80. [Google Scholar] [CrossRef]
- Nilsson, T.; Nelson, T.M.; Carlson, D. Development of fatigue symptoms during simulated driving. Accid. Anal. Prev. 1997, 29, 479–488. [Google Scholar] [CrossRef]
- Gimeno, P.T.; Cerezuela, G.P.; Montanes, M.C. On the concept and measurement of driver drowsiness, fatigue and inattention: Implications for countermeasures. Int. J. Veh. Des. 2006, 42, 67. [Google Scholar] [CrossRef]
- Lenné, M.G.; Triggs, T.J.; Redman, J.R. Time of day variations in driving performance. Accid. Anal. Prev. 1997, 29, 431–437. [Google Scholar] [CrossRef]
- Lenné, M.G.; Triggs, T.J.; Redman, J.R. Interactive Effects of Sleep Deprivation, Time of Day, and Driving Experience on a Driving Task. Sleep 1998, 21, 38–44. [Google Scholar] [CrossRef] [PubMed]
- Philip, P.; Sagaspe, P.; Moore, N.; Taillard, J.; Charles, A.; Guilleminault, C.; Bioulac, B. Fatigue, sleep restriction and driving performance. Accid. Anal. Prev. 2005, 37, 473–478. [Google Scholar] [CrossRef]
- Philip, P.; Taillard, J.; Moore, N.; Delord, S.; Valtat, C.; Sagaspe, P.; Bioulac, B. The Effects of Coffee and Napping on Nighttime Highway Driving. Ann. Intern. Med. 2006, 144, 785. [Google Scholar] [CrossRef]
- Makishita, H.; Matsunaga, K. Differences of drivers’ reaction times according to age and mental workload. Accid. Anal. Prev. 2008, 40, 567–575. [Google Scholar] [CrossRef]
- Reyner, L.A.; Horne, J.A. Evaluation of ‘In-Car’ Countermeasures to Sleepiness: Cold Air and Radio. Sleep 1998, 21, 46–50. [Google Scholar]
- Reyner, L.A.; Horne, J.A. Early morning driver sleepiness: Effectiveness of 200 mg caffeine. Psychophysiology 2000, 37, 251–256. [Google Scholar] [CrossRef] [PubMed]
- Reyner, L.; Horne, J. Efficacy of a ‘functional energy drink’ in counteracting driver sleepiness. Physiol. Behav. 2002, 75, 331–335. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RN | SN | N | L | Q | AN | AR | DS | RN | SN | N | L | Q | AN | AN | DS | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 5 | 2.98 | 108,222 | 6 | 0.051 | 1 | 1 | 36 | 3 | 7.98 | 32,596 | 7 | 0.074 | 2 | |
| 2 | 5 | 4.99 | 91,941 | 10 | 0.060 | 2 | 37 | 3 | 1.97 | 29,541 | 2 | 0.094 | 1 | |||
| 3 | 4 | 4.64 | 81,778 | 8 | 0.058 | 1 | 15 | 1 | 2 | 5.24 | 48,875 | 2 | 0.021 | 1 | ||
| 4 | 4 | 3.84 | 88,262 | 6 | 0.049 | 2 | 2 | 4 | 2.67 | 79,429 | 3 | 0.039 | 1 | |||
| 5 | 4 | 13.27 | 92,816 | 24 | 0.053 | 1 | 3 | 4 | 1.55 | 65,702 | 2 | 0.054 | 2 | |||
| 6 | 4 | 4.98 | 86,120 | 8 | 0.051 | 2 | 4 | 3 | 5.12 | 42,429 | 6 | 0.076 | 2 | |||
| 7 | 4 | 11.41 | 79,716 | 19 | 0.057 | 1 | 5 | 3 | 4.20 | 48,086 | 4 | 0.054 | 1 | |||
| 8 | 4 | 8.56 | 78,689 | 18 | 0.073 | 2 | 6 | 3 | 4.27 | 53,539 | 8 | 0.096 | 2 | |||
| 9 | 4 | 7.00 | 71,672 | 10 | 0.055 | 1 | 7 | 3 | 13.62 | 47,292 | 17 | 0.072 | 1 | |||
| 10 | 3 | 4.13 | 42,368 | 4 | 0.063 | 1 | 8 | 3 | 7.62 | 44,507 | 10 | 0.081 | 2 | |||
| 11 | 3 | 25.10 | 39,901 | 38 | 0.104 | 2 | 9 | 3 | 6.83 | 51,777 | 10 | 0.077 | 1 | |||
| 12 | 3 | 4.52 | 36,400 | 5 | 0.083 | 1 | 10 | 3 | 13.04 | 42,728 | 17 | 0.084 | 2 | |||
| 13 | 3 | 4.19 | 64,543 | 6 | 0.061 | 2 | 11 | 3 | 8.37 | 36,361 | 11 | 0.099 | 1 | |||
| 14 | 4 | 3.80 | 54,009 | 5 | 0.067 | 2 | 12 | 3 | 9.17 | 34,486 | 11 | 0.095 | 2 | |||
| 15 | 4 | 10.32 | 55,603 | 17 | 0.081 | 1 | 13 | 2 | 7.28 | 27,312 | 6 | 0.083 | 2 | |||
| 16 | 4 | 4.99 | 49,667 | 6 | 0.066 | 2 | 14 | 2 | 14.38 | 18,845 | 7 | 0.071 | 1 | |||
| 17 | 3 | 6.20 | 42,114 | 5 | 0.052 | 1 | 15 | 2 | 10.90 | 16,082 | 6 | 0.094 | 2 | |||
| 18 | 3 | 12.15 | 18,670 | 12 | 0.145 | 2 | 16 | 2 | 19.32 | 15,094 | 13 | 0.122 | 1 | |||
| 19 | 3 | 16.54 | 17,492 | 17 | 0.161 | 1 | 17 | 2 | 11.79 | 14,026 | 6 | 0.099 | 2 | |||
| 20 | 3 | 10.29 | 17,526 | 6 | 0.091 | 2 | 18 | 2 | 8.51 | 14,046 | 7 | 0.160 | 1 | |||
| 21 | 3 | 10.08 | 17,050 | 9 | 0.143 | 1 | 19 | 2 | 12.21 | 13,512 | 9 | 0.149 | 2 | |||
| 22 | 3 | 11.83 | 17,383 | 13 | 0.173 | 2 | 20 | 2 | 8.99 | 17,173 | 7 | 0.124 | 1 | |||
| 23 | 3 | 7.87 | 16,124 | 8 | 0.173 | 1 | 21 | 2 | 6.22 | 18,090 | 8 | 0.195 | 2 | |||
| 24 | 3 | 9.77 | 17,532 | 8 | 0.128 | 2 | 22 | 2 | 8.40 | 12,737 | 9 | 0.230 | 1 | |||
| 25 | 4 | 5.43 | 74,924 | 16 | 0.108 | 1 | 23 | 2 | 11.95 | 11,932 | 7 | 0.134 | 2 | |||
| 26 | 4 | 7.88 | 66,619 | 17 | 0.089 | 2 | 24 | 2 | 13.73 | 11,946 | 12 | 0.200 | 1 | |||
| 27 | 4 | 3.84 | 65,793 | 7 | 0.076 | 1 | 25 | 2 | 15.98 | 11,098 | 16 | 0.247 | 2 | |||
| 28 | 4 | 9.41 | 36,324 | 16 | 0.128 | 2 | 26 | 2 | 9.67 | 11,407 | 6 | 0.149 | 1 | |||
| 29 | 3 | 16.85 | 25,182 | 22 | 0.142 | 1 | 27 | 2 | 8.16 | 12,739 | 6 | 0.158 | 2 | |||
| 30 | 3 | 17.73 | 22,111 | 35 | 0.245 | 2 | 28 | 2 | 4.91 | 12,078 | 3 | 0.139 | 1 | |||
| 31 | 3 | 10.30 | 22,012 | 18 | 0.218 | 1 | 29 | 2 | 14.89 | 7,177 | 10 | 0.256 | 2 | |||
| 32 | 3 | 28.15 | 23,668 | 36 | 0.148 | 2 | 30 | 2 | 23.83 | 6,023 | 14 | 0.267 | 1 | |||
| 33 | 3 | 1.42 | 31,199 | 1 | 0.062 | 1 | 31 | 2 | 7.41 | 6,032 | 4 | 0.245 | 2 | |||
| 34 | 3 | 6.63 | 32,459 | 6 | 0.076 | 2 | 32 | 2 | 3.66 | 16,350 | 2 | 0.092 | 1 | |||
| 35 | 3 | 13.81 | 33,744 | 14 | 0.082 | 1 | 33 | 2 | 6.46 | 12,286 | 3 | 0.104 | 2 |
| Scenario | Purpose | Dataset | Value | Value | Value |
|---|---|---|---|---|---|
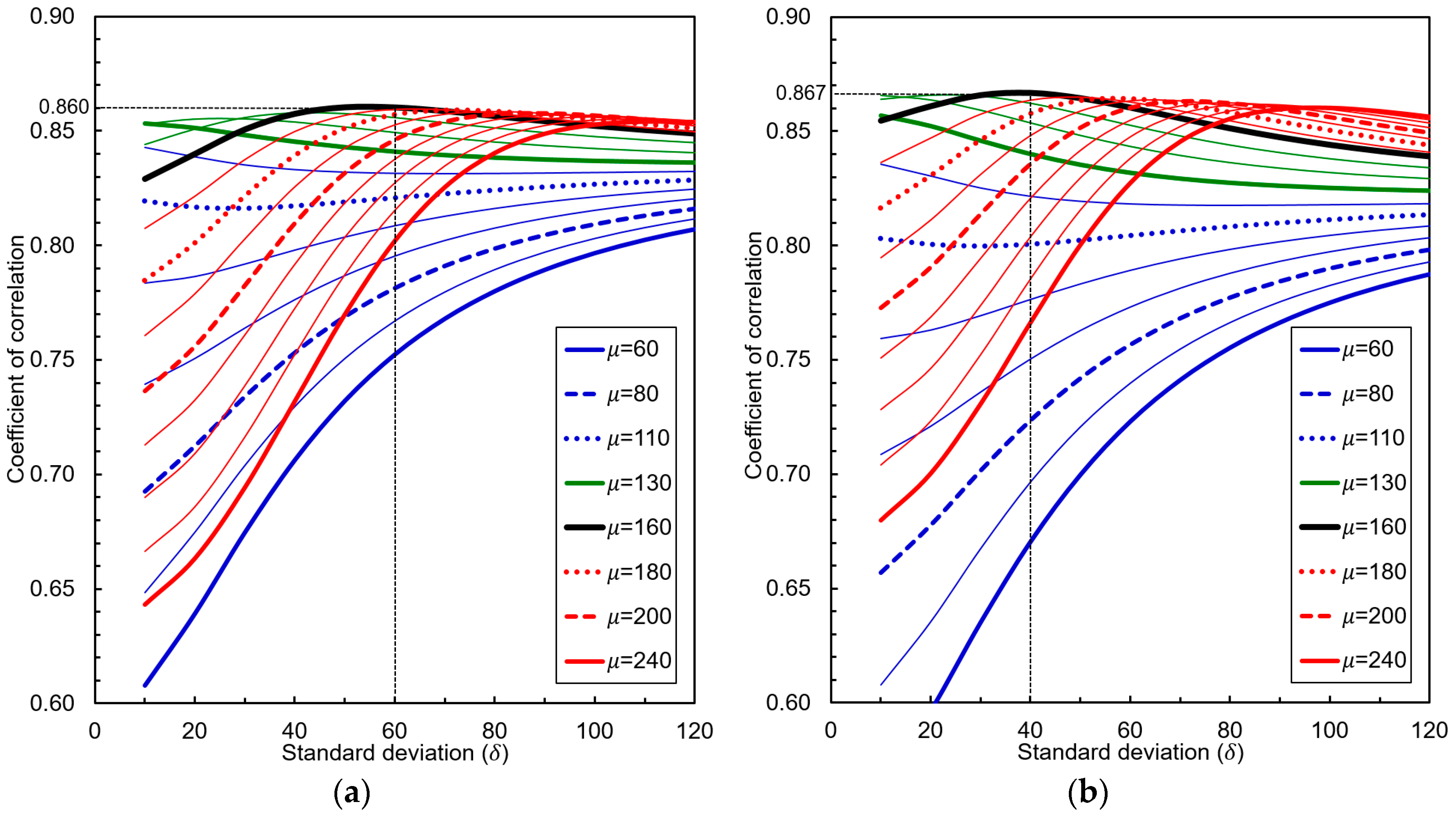
| S1 | Calibration | 1 | 160 | 60 | 0.860 |
| Validation | 2 | - | - | 0.857 | |
| S2 | Calibration | 2 | 160 | 40 | 0.867 |
| Validation | 1 | - | - | 0.860 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, H.; Park, D. Potentialities of Vehicle Trajectory Big Data for Monitoring Potentially Fatigued Drivers and Explaining Vehicle Crashes on Motorway Sections. Sustainability 2020, 12, 5877. https://0-doi-org.brum.beds.ac.uk/10.3390/su12155877
Chang H, Park D. Potentialities of Vehicle Trajectory Big Data for Monitoring Potentially Fatigued Drivers and Explaining Vehicle Crashes on Motorway Sections. Sustainability. 2020; 12(15):5877. https://0-doi-org.brum.beds.ac.uk/10.3390/su12155877
Chicago/Turabian StyleChang, Hyunho, and Dongjoo Park. 2020. "Potentialities of Vehicle Trajectory Big Data for Monitoring Potentially Fatigued Drivers and Explaining Vehicle Crashes on Motorway Sections" Sustainability 12, no. 15: 5877. https://0-doi-org.brum.beds.ac.uk/10.3390/su12155877