1. Introduction
Electric Vehicles (EVs) are currently trending in the automotive industry and there is an increased demand for this type of vehicle. In 2017, 1.3 million units were sold around the world, while in 2020 this number is estimated to have increased to around 2.9 million. This number corresponds to 1% of the total passenger vehicle sales and corresponds to 57% of the 2016 numbers [
1]. Various original equipment manufacturers (OEMs) are ready to introduce more than 100 car models powered by electric motors by 2024, and the total share of electric vehicles is estimated to reach 20–25% globally by 2030. The ability of EVs to reach higher ranges and targets depends on increasing design efficiency or reducing manufacturing costs; therefore, the main target is that they can become affordable to more customer segments. However, the relatively short cruising range and the increased charging time of EVs are among the main obstacles to their development and widespread use. Thus, energy consumption is a factor of great interest throughout the automotive industry and significant research is conducted in every automotive component in order to a achieve higher range.
As found in the literature, various research articles are referred to in this topic. In [
2], an EV energy consumption model was developed, capable of estimating electric and hybrid vehicle energy consumption using a braking-energy regeneration model, which estimated energy consumption based on vehicle trajectories, instantaneous speed–velocity profiles, and road grade. In [
3], a study of the effects of different parameters on the performance characteristics of electric vehicles is conducted, where an EV simulation model is established and calibrated using experimental data related to vehicle energy flow and driving range analysis.
Several factors are have an effect on energy consumption. The major effects are (i)
Ambient temperature—the ambient temperature greatly affects the battery performance, its power output capability, and thus its effectiveness [
1]. (ii)
Route type—energy consumption is inherently dependent on the driving environment (city, highway, etc.) and the road topography. For example, in a city, consumption is higher due to the frequent stops and consequent accelerations during driving. In addition, driving uphill requires more energy than driving on a flat road, and going downhill requires less energy and may increase energy regeneration [
4]. Another issue covered in [
5] is the development of a framework that can estimate energy the consumption of EVs by combining models that are derived by traffic flow theory and the mechanics of locomotion and Floating Cara Data (FCD) from available Information and Communications Technology (ICT) devices. This framework elucidates the possibility of integration in Intelligent Transportation System (ITS) applications. (iii)
Driving style—an aggressive driving style with raw acceleration and deceleration phases reduces the autonomy of the battery, while economic driving and smooth pedal motions with constant moderate speed decreases electrical energy consumption. (iv)
Traffic conditions—consumption may vary depending on traffic conditions and congestion level. (v)
Vehicle accessory utilization—when using vehicle accessories, such as the air conditioner or the defroster system, a significant amount of energy that does not contribute to the propulsion of the vehicle is permanently consumed [
6,
7].
The aforementioned factors that alter the energy consumption depend on the environment and the driving habits of any driver. As such, they are factors that we cannot directly relate to vehicle development. In contrast, an ongoing process in the automobile industry is to establish techniques that can make electric vehicles more efficient in an effort to improve the energy consumption. Fundamentally, the techniques used include the following aspects.
Reducing vehicle resistance: Lightweight materials and advanced manufacturing technologies can reduce the weight of vehicles, which results in lowering the power demanded by the motor. Considering that a 10% weight reduction in a vehicle can lead to 6–8% lower energy consumption [
8], it is obvious that this is a valuable approach for all future vehicles. On this path, the rapid development of tools resulting in lightweighting has been greatly supported by the EU in the last few years [
9]. Such funded research projects demonstrate the capabilities of up to 35% weight reduction in the car Body-in-White stage [
10]. Reducing aerodynamic resistance is also quite important at high speeds. As shown in [
11,
12], its reduction can positively affect energy consumption.
Energy management strategy: The use of power management systems in the vehicle helps to manage energy with a hybrid power train so the motor can draw energy from the appropriate energy source, depending on the conditions, and distribute energy from regenerative braking [
13,
14].
Properly matched transmission: The parameters of transmission, especially gear number and gear ratios, have considerable influence on operating power economy. In an effort to reduce consumption by properly matched transmission, different types of gearboxes are used, such as two-speed manual, automatic, and manual transmission or variable transmission systems, as well as an analysis of the correct way to change them [
15,
16,
17,
18,
19].
Up to now, the majority of the production vehicles uses conventional Manual Transmissions (MTs) or Automatic Transmissions (ATs), Continuously Variable Transmissions (CVTs), and Infinitely variable transmissions. A study of specific characteristics related mostly to their efficiency, torque transfer, and applicability is presented in [
20,
21,
22]. The torque characteristic is a key advantage of an electric motor, as it can transfer all the available torque (maximum torque) from the start and up to relatively low speeds [
23]. This competitive advantage is used by most of the commercially available EVs, by installing powertrains directly connected to the driving wheels via a single reduction ratio [
20]. Current state of the art on gearbox or alternative transmissions use on EVs is found in literature [
18,
19,
24,
25], including a vast number of simulation based comparisons using 2-speed versus single speed gearbox or CVT’s use [
16,
18,
23,
26,
27,
28,
29,
30]. In [
31], different electric drivetrain configurations were discussed along with the implications of installing a multiple speed transmission in a fully electric drivetrain. In [
32], a vehicle model was developed consisting of physical models of the components, considering the moments of inertia, drag torques, and efficiency maps which accounted for the variation on temperature (specifically the electric motor). Furthermore, an optimization of the gear ratios for both transmissions and shift points for the two-speed was undertaken. In [
33], the authors went on to analyze two-speed, three-speed, and four-speed drivetrains with gear ratios selected based on the results of the CVT gear ratio optimization.
According to the above, there is limited research based on real on-road tests for model validation, in order to identify if and how a single-speed gearbox can provide a feasible solution towards reduced energy consumption. To the best of our knowledge, such research results have been only based in simulation results and no comparison of gear ratio effects is presented. This paper is focused on the technique of improving the energy consumption via the correct choice of the final gear ratio, so that an electric vehicle can work at more efficient operation points and draw less power from the energy source. In view of the fact that many EVs are equipped with a single-speed gearbox to reduce cost, volumes, losses, and drivetrain mass, extended experimental results of a single-speed transmission are presented. These tests are conducted using a prototype electric vehicle developed by our research team (TUC Eco Racing), under various scenarios. A dynamic model of the vehicle is created and fine-tuned using dedicated software, based on experimental results. Dynamic simulations are performed to compare and evaluate different gear ratio setup, providing valuable insights of their effect on energy consumption, towards the selection of an optimal gear ratio for the specific vehicle.
The rest of the manuscript is organized as follows. In
Section 2, we describe the methodology followed for our experimental testing, including the testbed vehicle used, with specifications, powertrain details and data recording set-up, along with the on road tests conducted. In
Section 3, we present how we modeled in detail all the vehicle’s components used as input to a dedicated dynamic simulation software.
Section 4 presents the results of simulations with different gear ratios, providing a comparison between the different configurations, as also the sustainability impacts of our findings. Finally, in
Section 5 we present a discussion of the key conclusions and findings and provide useful insights for future research.
4. Results
Based on numerous experimental on road tests and data collected, a valid vehicle model was developed. As already mentioned, the main target of this research is to use this dynamic vehicle model for the determination of a suitable gear ratio that can provide the lowest possible energy consumption. The final on road experiments took place in a racetrack, as detailed in
Section 2.2.2, using the standard gear ratio (1:8) and two alternative gear ratios (1:6, 1:10) were simulated and compared. A comparison of simulation and experimental results is conducted first, using the standard gear ratio of 1:8 for a distance of 10 laps in the racetrack. Then, the 10 laps are duplicated in simulation (in terms of speed profile) using the alternative gear ratios (1:6, 1:10) and comparative results are presented. Next, the best lap is chosen, corresponding to the lower energy consumption achieved in the track and it is used for further comparison of gear ratios effects. Finally, the sustainability issues that arise from our results are discussed and calculation of their impacts are presented for the year 2050.
4.1. Racetrack Comparative Simulation
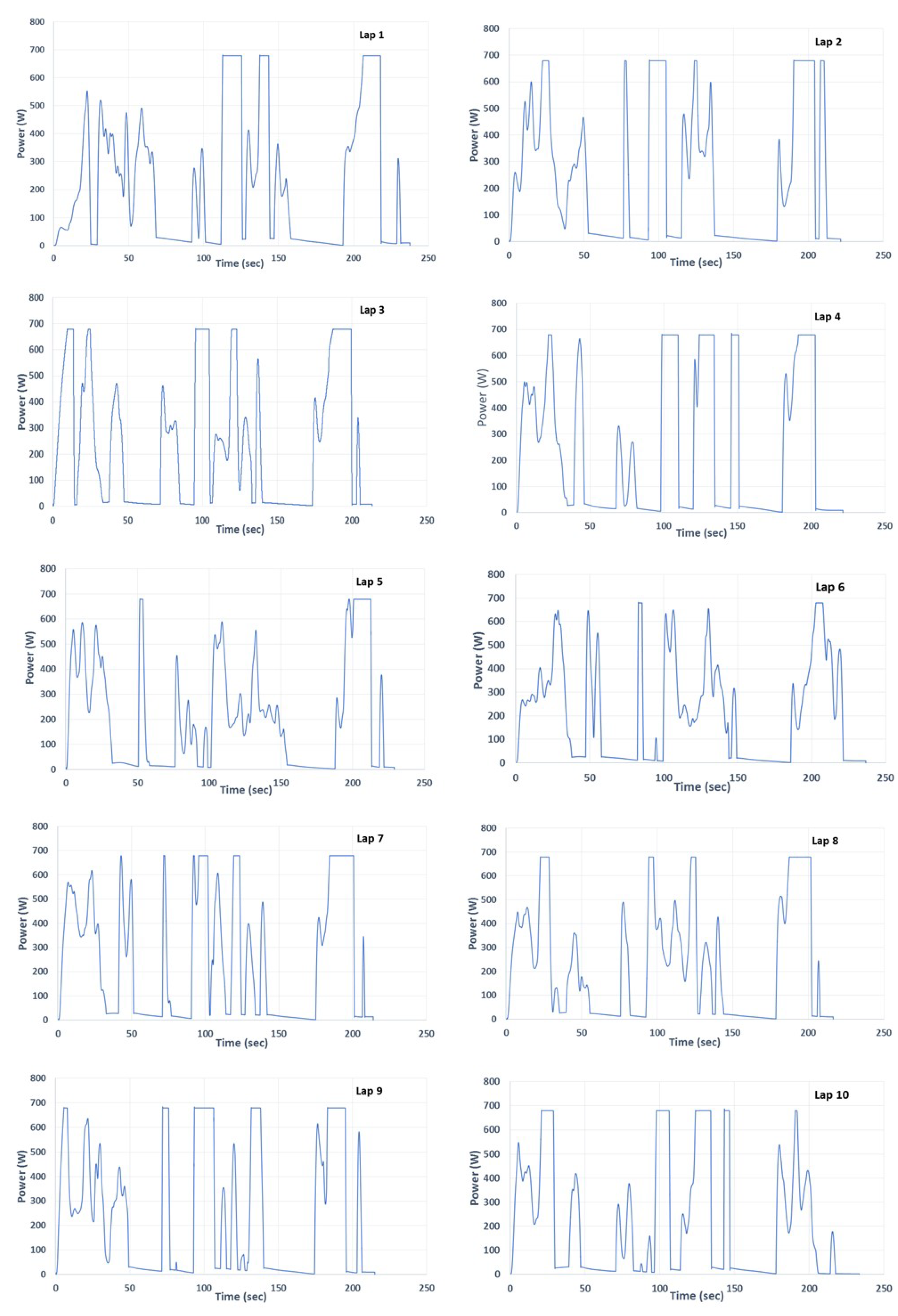
The testbed vehicle completed 10 laps in the racetrack and the various operational parameters recorded are used for the final verification and tuning of our dynamic model, using the standard gear ratio of 1:8. Several simulations were performed, on a lap by lap basis, until minimum energy consumption deviation was reached, comparing experimental versus simulation results (
Table 3). The efficiency included in
Table 3, corresponds to the electric motor’s efficiency calculated by the simulation software. The power needs of the vehicle’s electric motor for every lap, as obtained by the simulation software, are presented in
Figure 5.
The time of every lap was identical to experimental results, as a specific velocity profile was used. Regarding the energy consumption, our dynamic model presented differences of 0.7–7.7%, resulting to a mean value of 4.16%. It must be noted that the lowest difference is found in Lap 5 (0.7%), where also (a) the highest motor efficiency and (b) the lowest energy consumption is achieved. It must be clarified that lap 10 is 60 m shorter than the other laps and that is why we consider Lap 5 to have the lowest consumption. The lap time has an important impact on energy consumption, as a higher lap time equals to lower mean velocity inside the track. But this is not straight forward, as the velocity profile is the second factor critically affecting energy consumption. An example for this insight, is that if we consider experimental values of lap 3 and 7 which have almost equal lap time, different mean energy consumption is achieved. The average simulated energy consumption calculated for the 10 laps corresponds to 230.85 W, while from the experimental data 229.71 W was found, showing a difference of 0.4%. The small variations of experimental versus simulation results confirmed that the simulation is adequate and can be used for further experimentation.
Following the validation of our dynamic model, we can focus on the evaluation of different gear ratios. Only the gear ratio is changed in the model and exactly the same velocity profile is used, in order to replicate the 10 laps. As so, every lap time remains constant and the only change is due to acceleration differences. The first simulation results presented correspond to a gear ratio 1:6 and the second to gear ratio 1:10, as shown in
Table 4 and
Table 5.
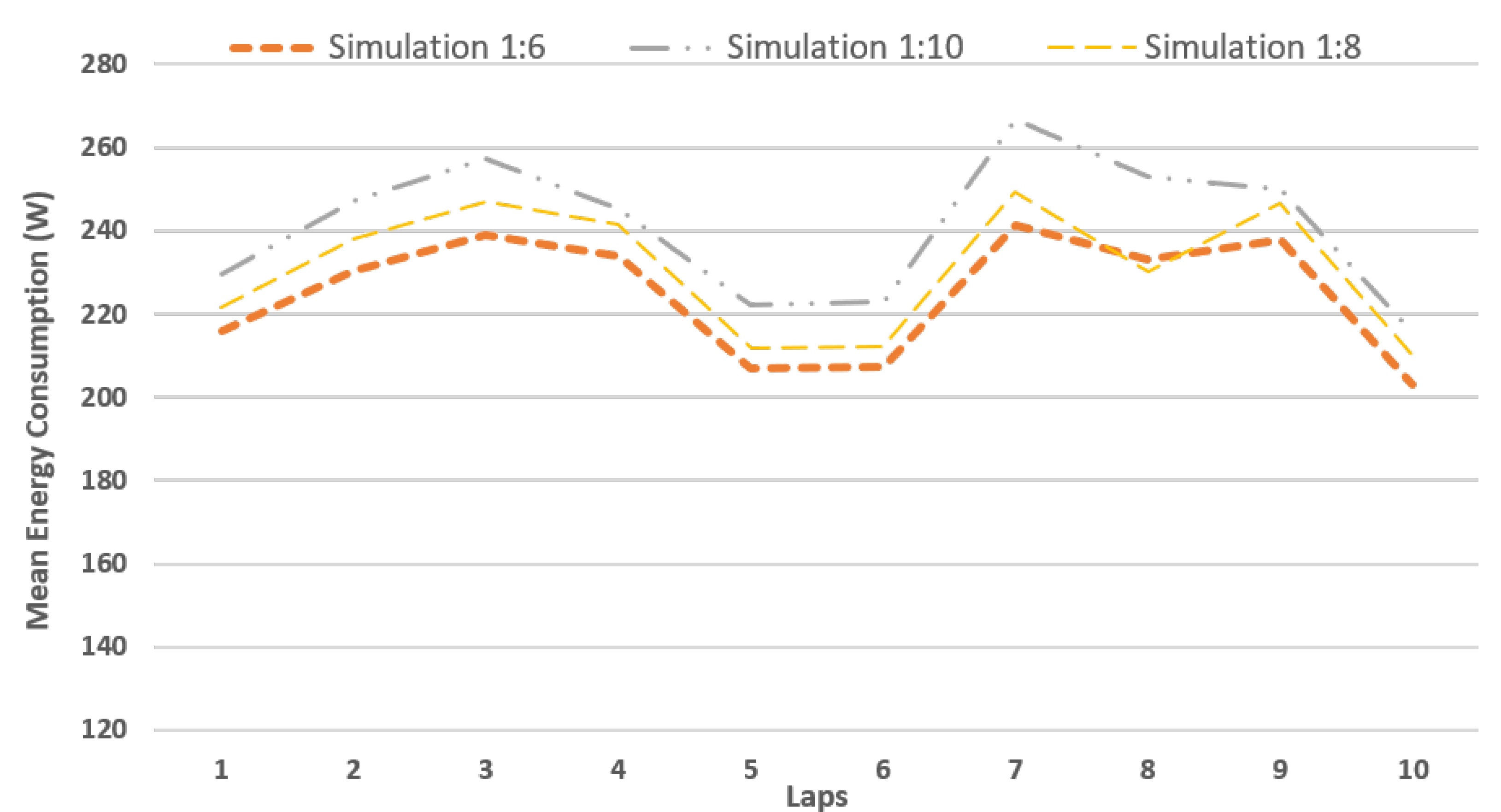
Simulation results evaluation is based on the mean energy consumption values obtained for the 10 laps, where for gear ratio 1:6 and 1:10 are 224.81 W and 240.93 W, respectively. Compared to ratio 1:8 (230.85 W), ratio 1:6 provided 2.6% lower mean consumption and ratio 1:10 higher mean consumption of 4.2%. A general observation is that ratio 1:6 should be chosen to lower the testbed vehicle energy consumption. A graphical representation is used to highlight the differences that occur in every simulated lap, as shown in
Figure 6, for further evaluation of gear ratios comparison.
It can be seen that with a higher ratio, 1:10, the vehicle would consume more power in every lap, compared to standard gear ratio (1:8). Alternatively, the lower ratio 1:6 presents lower energy consumption in every lap, except lap 8 (+1.26%). As all the laps considered have different time and velocity profile, more conclusions can be drawn from these observations and need to be discussed. The first comment is related to the percentage of consumption differences between gear ratio 1:8 and 1:10, which range from 1.54% to 8.95%, thus velocity profile critically affects energy consumption due to more aggressive accelerations. On the contrary, ratio 1:6 presents almost equal differences in all laps, ranging from 2.74% to 3.74%. In this case it is less effected by velocity fluctuations (as in ratio 1:10) because the driver is limited (by the gearbox) to perform smooth accelerations, which minimize the energy consumed. Based on the aforementioned it can be assumed that lower gear ratios offer higher potentials to adjust vehicle performance and minimize energy consumption, when discussing the use of a single-speed gearbox.
4.2. Best Lap Simulation
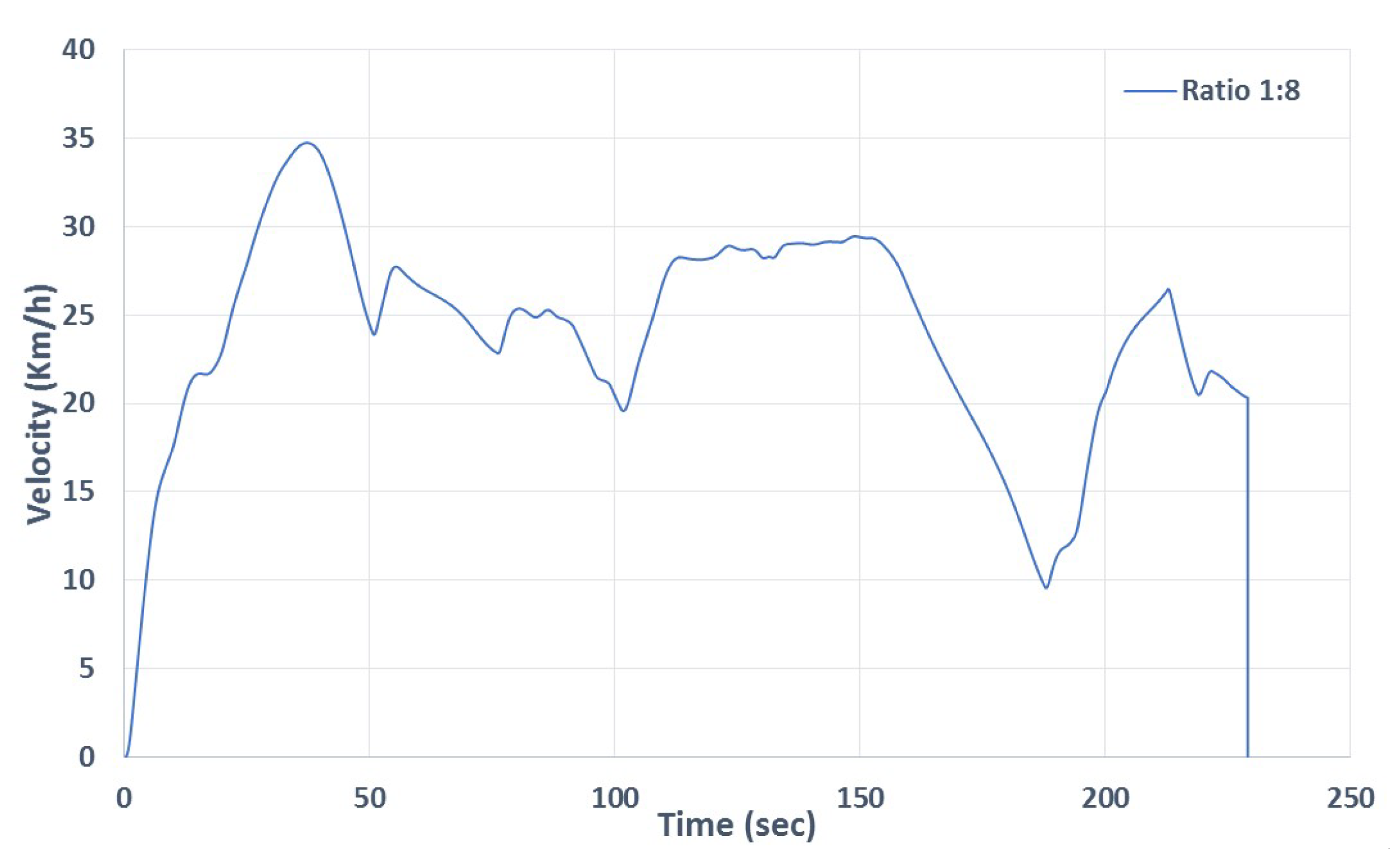
As mentioned before, in lap 5 the lowest difference between experimental and simulation results was found (0.7%) where the lap time achieved was 229 s. In contrast to typical racing conditions, where the target is to finish every lap in the lowest time, in order to obtain lower consumption every lap should be completed in the maximum time possible. For the specific racing track the target is to finish the 10 laps in up to 2340 s (39 min). Therefore the optimum lap time should be as close as possible to 234 s. Based on this, laps 1, 5, 6, and 10 were the best achieved by the driver, in terms of time and consumption. However, laps 1 and 6 exceed the ideal lap time (234 s) and lap 10 is 60 m shorter. Lap 5 presents the lowest deviation from experimental data and for the above mentioned reasons is chosen as the ideal lap. It is easy to assume that all the races should be driven with this driving profile (
Figure 7), targeting to achieve the lowest possible energy consumption. Thus, this lap is considered the best lap and further experimentation is conducted to explore the effects of the alternative gear ratios.
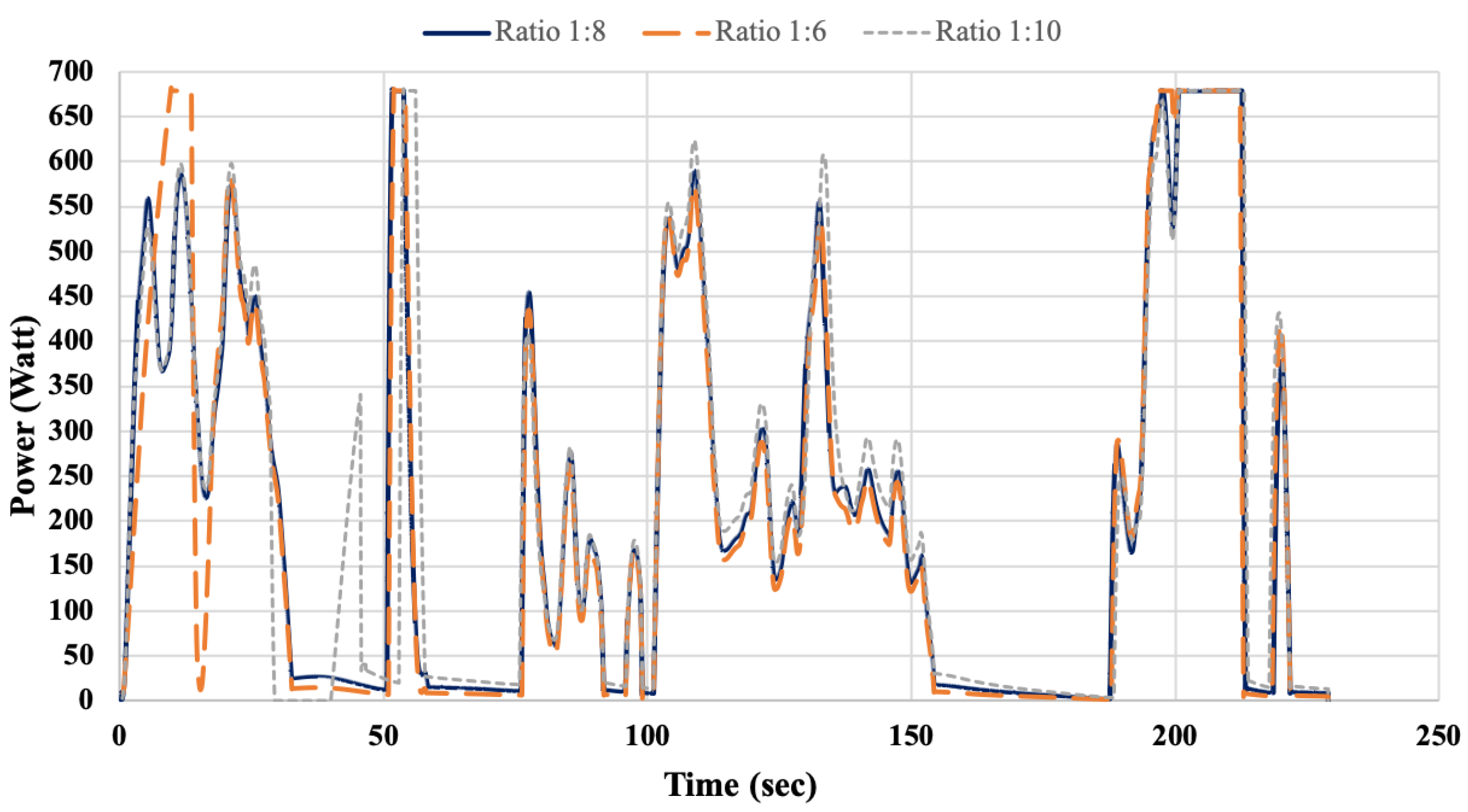
The simulation results are summarized in
Table 6. Using ratio 1:6 a 2.4% lower consumption would be achieved and with ratio 1:10 a 4.6% higher consumption would result.
A comparative diagram of the energy over time for this specific lap is presented in
Figure 8, for further insight in this evaluation. Differences are relative small between the three ratios, but the small spikes in certain points of the diagram constitute the differences discussed, especially for ratio 1:10. The conclusion obtained from this focused evaluation, is that even in a lap where the driver managed to achieve the best possible lap time and velocity profile, a lower gear ratio would provide 2.4% benefits on energy consumption. In contrast, a higher gear ratio would result to 4.6% higher power demand. It is clear that an optimal gear ratio choice would therefore improve an electric vehicle’s consumption and it should be carefully chosen.
4.3. Sustainability Issues
The aforementioned results revealed that when using a single-speed gearbox in an electric vehicle, several benefits of reduced energy consumption can be achieved by an optimal gear ratio use. In this section, we consider the effects of this reduction in the sustainability of electric vehicles, considering the reduction of power from the change of gear ratio as well as from the driving style. As presented in
Section 4, our vehicle has an average energy consumption of 230.85 Watt (0.231 KW), the time in the racetrack was 2238.5 s and the distance covered was 15.5 Km. These values correspond to an energy consumption of 0.371 KWh for the specific prototype vehicle and considering the distance covered, this equals to 0.0239 KWh/Km. These values are far lower than current production vehicles, considering that it is a very low weight prototype vehicle. From the results presented in
Section 4.1, the use of gear ratio 1:6 provides 2.6% lower mean energy consumption compared to gear ratio 1:8. Moreover, the aggressiveness of the driver or else the driving style, has a considerable effect in electric vehicle energy consumption. Based on the simulation results presented in
Table 4 for the 1:8 gear ratio, the best lap achieved in the track (Lap 5) shows a 7.6% reduction (211.84 W), in respect to 230.85 W mean energy consumption for the 10 laps. Moreover, if an optimal gear ratio is used, this would provide an additional 2.4% reduction of energy consumption (
Table 5), which results to a total reduction of 10.4%. Thus combining an economy driving style and an optimal gear ratio would achieve 10.4% reduction required by the power grid for electric vehicle’s charging.
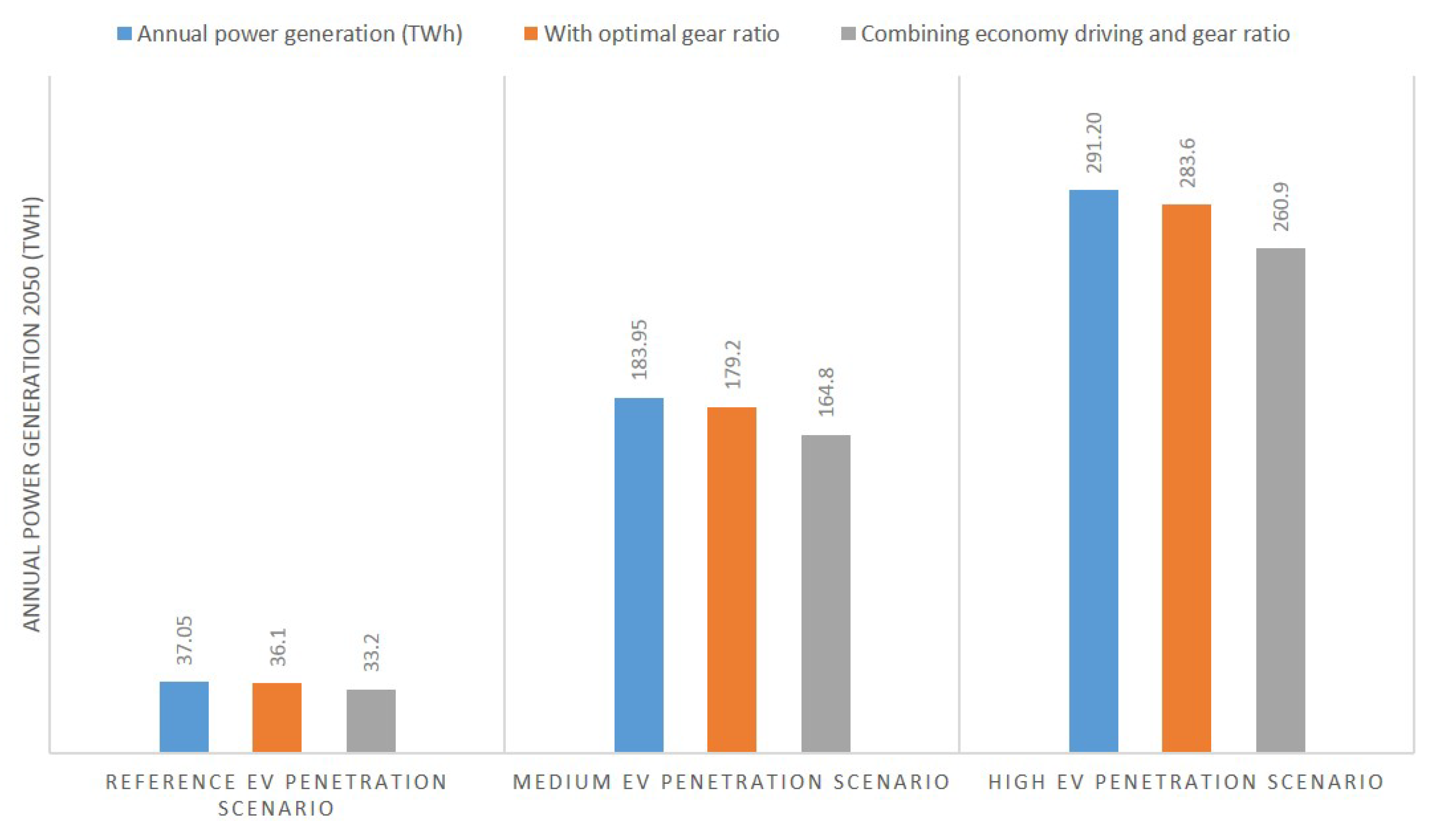
In order to make a projection of this effect on sustainability, we consider the total annual energy demand from transport for EU-28 [
44], which presents three different penetration scenarios of Battery Electric Vehicles (BEVs) for year 2050. The Reference scenario considers an 8% EVs share in 2050, while the Medium 50% and High scenarios 80%. The annual power generation demand for charging of electric vehicles, is assumed 57 TWh, 283 TWh and 448 TWh for the three scenarios respectively [
44]. Furthermore, in this work we focused on single-speed transmissions for EVs. Thus we should distinguish the single-speed transmission EVs from the total fleet. The key findings for the 2019 EV transmission market in EU [
45], conclude that single speed transmissions have an 80% market share of EVs sold. Since we could not find a projection of their sales for 2050, we assume that technology advances will decrease their share, but due to low cost they will remain dominant in the market. As so, for our brief study presented here we assume a 65% market share for 2050, whereas the annual power generation demand for charging of electric vehicles that can be effected by our gear ratio findings, are now assumed 37.05 TWh, 183.95 TWh, and 291.20 TWh for the three scenarios. The effects of 2.6% energy reduction from optimal gear ratio and 10.4% by the combination of economy driving and optimal gear ratio, on the annual power generation demand for 2050, are presented in
Figure 9. It is evident that for higher EV market penetration there are higher energy benefits. Of course, this reduction of energy demand from the power grid will have economical and environmental benefits. The economic impacts reflect to lower additional power generation for vehicle’s charging and the environmental to lower CO
emissions from the power generation.
5. Discussion
Energy consumption of electric vehicles is a major research topic for the automotive industry, but also extends to the related infrastructure and its impact towards a sustainable future. The use of a gearbox in electric cars is also a highly discussed subject, directly related to driving performance and energy consumption. In this work, the main scope was to explore the effects of gear ratio choice when a single-speed gearbox is installed on an electric vehicle. For this purpose, a prototype electric vehicle developed by our research team was used and numerous experimental tests were conducted. The experimental data gathered were then used to fine-tune a valid dynamic simulation model, which was set up on CarMaker commercial software. The final simulation model was compared to experimental results, where a mean difference of 0.4% was found for the ten laps in the racetrack. As so, it was confirmed that our model was adequate for further experimentation on the energy consumption of the specific vehicle.
As a next step, alternative gear ratios were defined (1:6, 1:10) and used, targeting the evaluation of their effects on the vehicle’s energy consumption. We chose these limits to have an equal difference from the standard gear ratio (1:8), so that their effects in energy consumption would be evident and useful. Using simulation results for the 10 laps, the mean energy consumption was calculated at 224.81 W and 240.93 W for gear ratio 1:6 and 1:10 respectively. Compared to ratio 1:8 (230.85 W), ratio 1:6 provided 2.6% lower mean consumption and ratio 1:10, 4.2% higher. A second test case explored: the effects of these ratios on the best lap completed in the racetrack, which corresponds to the best driving profile achieved by the driver, that provided the lowest energy consumption. In this case, the simulation results showed that using ratio 1:6 a 2.4% lower consumption would be achieved, while with ratio 1:10 a 4.6% higher consumption would occur. If just the effects of driving style are considered, then the best lap shows a 7.6% energy reduction compared to the mean energy consumption of the 10 laps.
Based on the above, the following important insights are evident. (a) Lower gear ratios offer higher potentials to minimize energy consumption, as it is less effected by sudden velocity changes (that occur in higher ratios) due to the fact the driver is limited to perform more smooth accelerations. (b) Velocity profile is a major factor affecting energy consumption while lap time should also be considered but has a lower effect. (c) Even if an ideal velocity profile is achieved by an economy driving style, a lower gear ratio provides additional energy consumption benefits.
The work presented, highlighted that an optimal gear ratio choice, for an electric vehicle equipped with a single-speed gearbox, would improve the energy consumption and it should be carefully chosen. Moreover, according to experimental and simulation results, the lowest possible gear ratio would be the best choice towards highest energy consumption benefits. Even if the percentage of these benefits is not very high, it is a strong indication of the operation that single-speed electric vehicles should target, towards a sustainable future. To the best of our knowledge, limited literature exists on the effects of gear ratios for a single-speed electric vehicle and therefore the results presented can be a useful insight for further research. Our future target will be to develop a certain methodology, that can combine simulation and experimental results and calculate the optimal gear ratio applicable for a specific electric vehicle.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}