
Design and Implementation of a Maximum Power Point Tracking System for a Piezoelectric Wind Energy Harvester Generating High Harmonicity




Abstract
:1. Introduction
2. Harvester Design and Theoretical Description
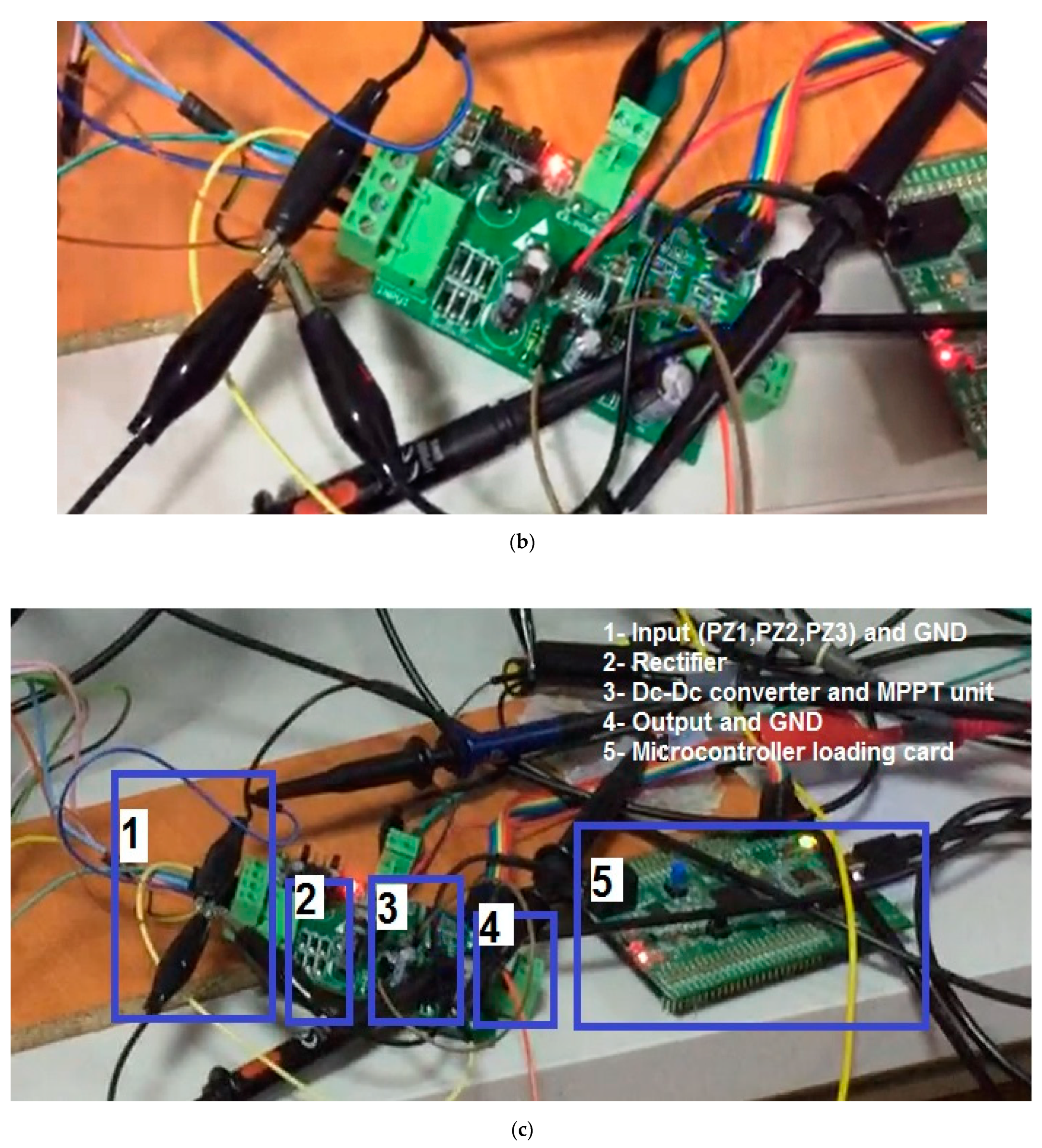
3. Experimental Setup
4. Theoretical Results and Discussion
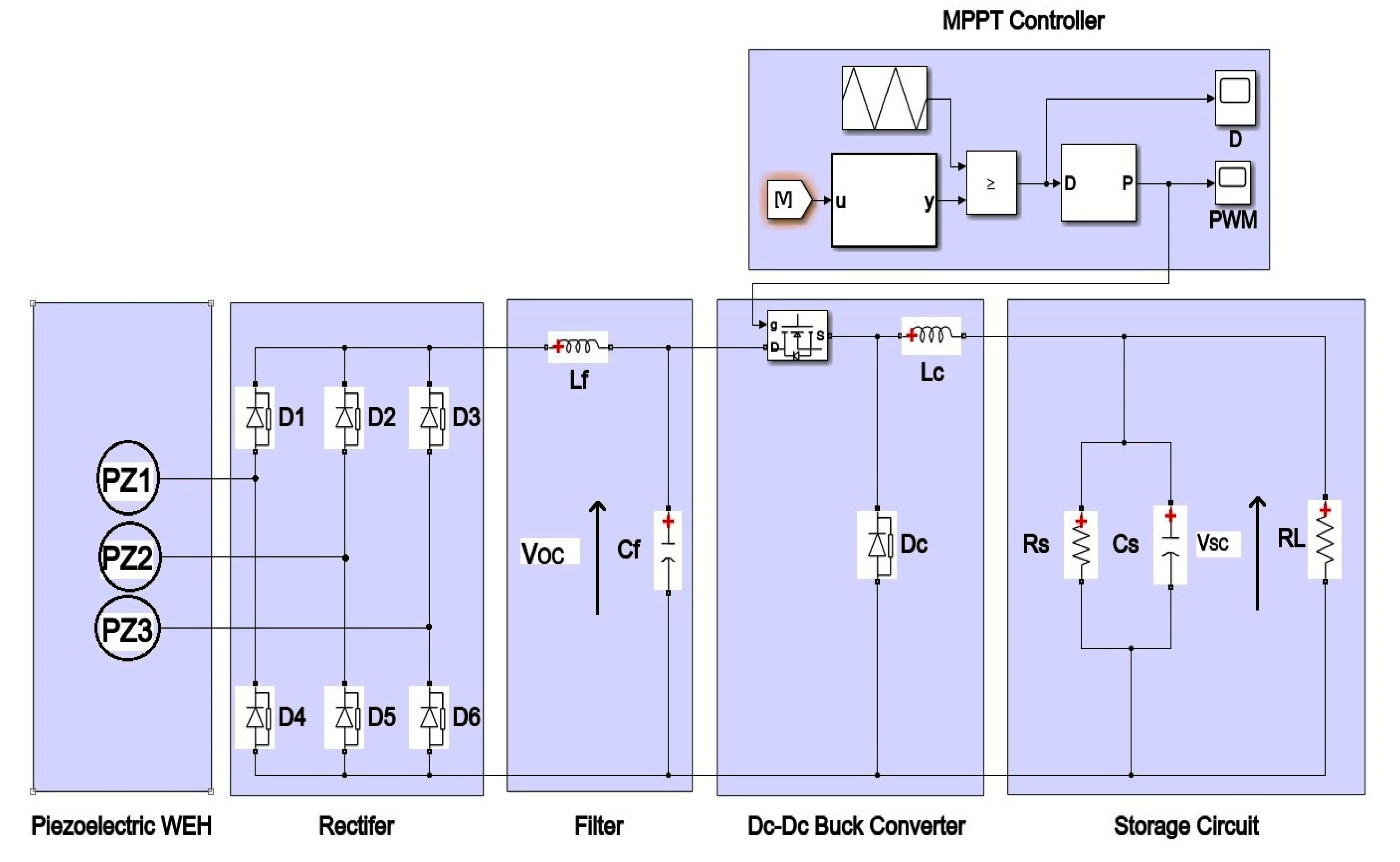
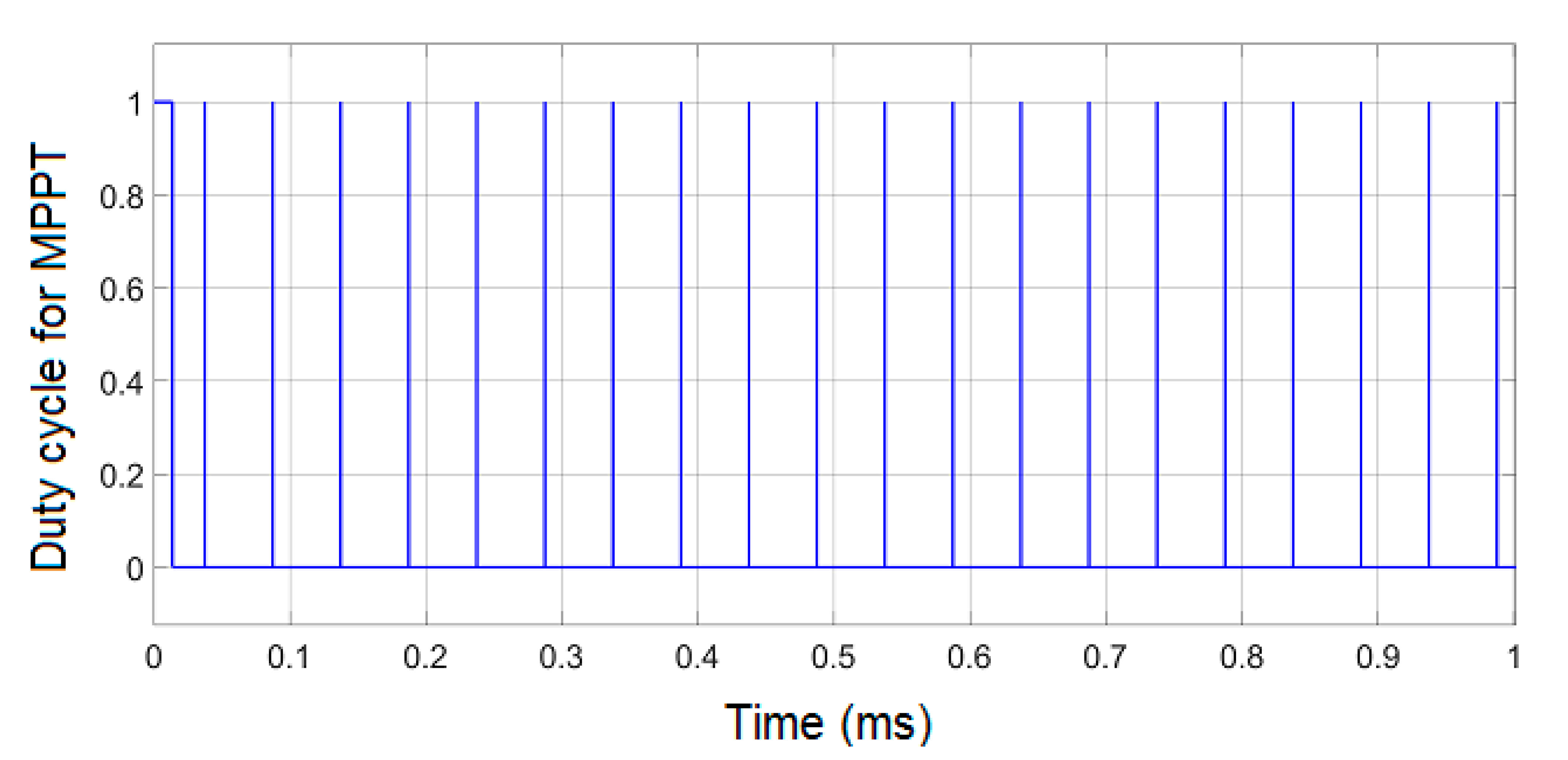
4.1. Simulation of the MPPT Control Circuit
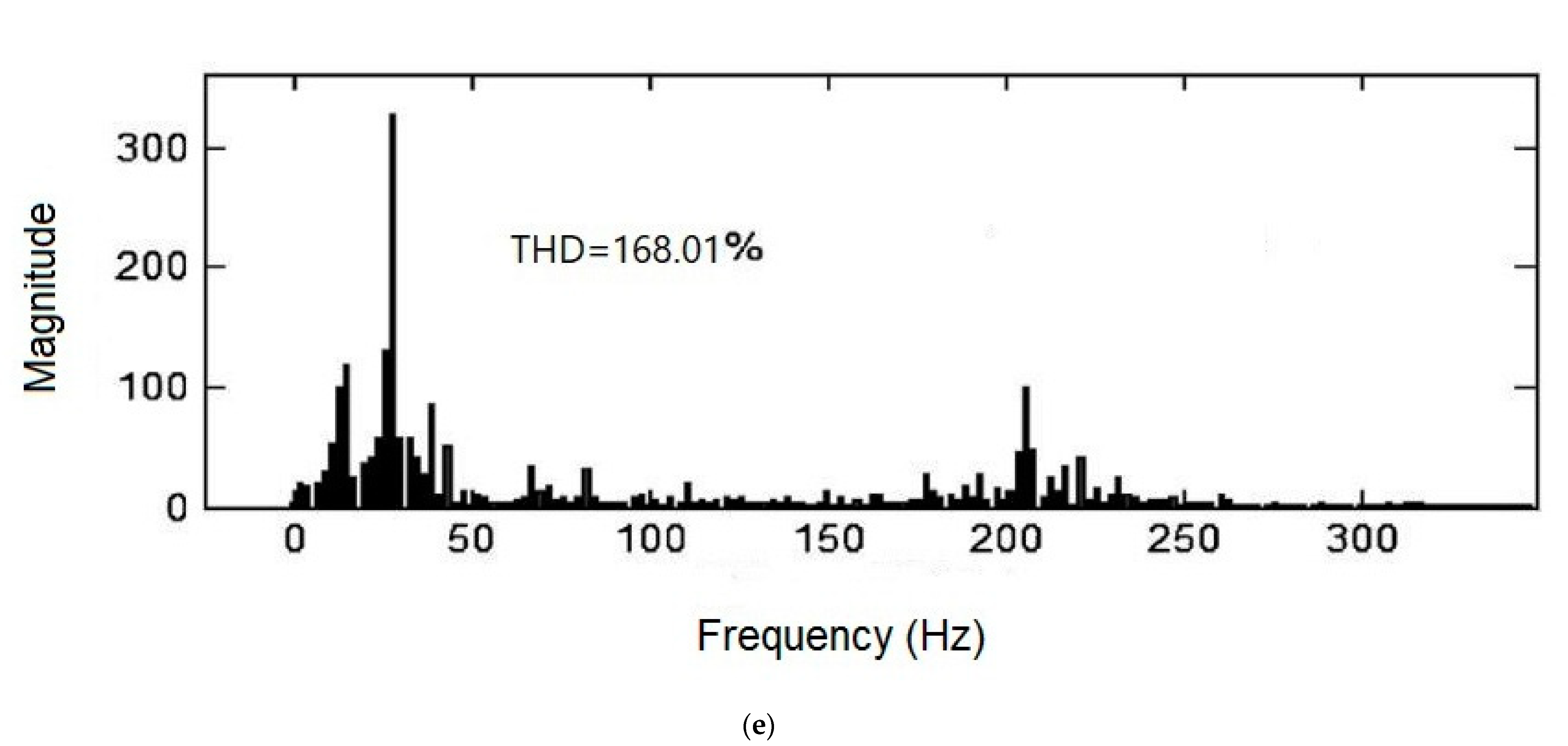
4.2. Piezoelectric Component
4.3. AC—DC Rectification Component
4.4. LC Output Filter Unit
4.5. DC—DC Buck Converter
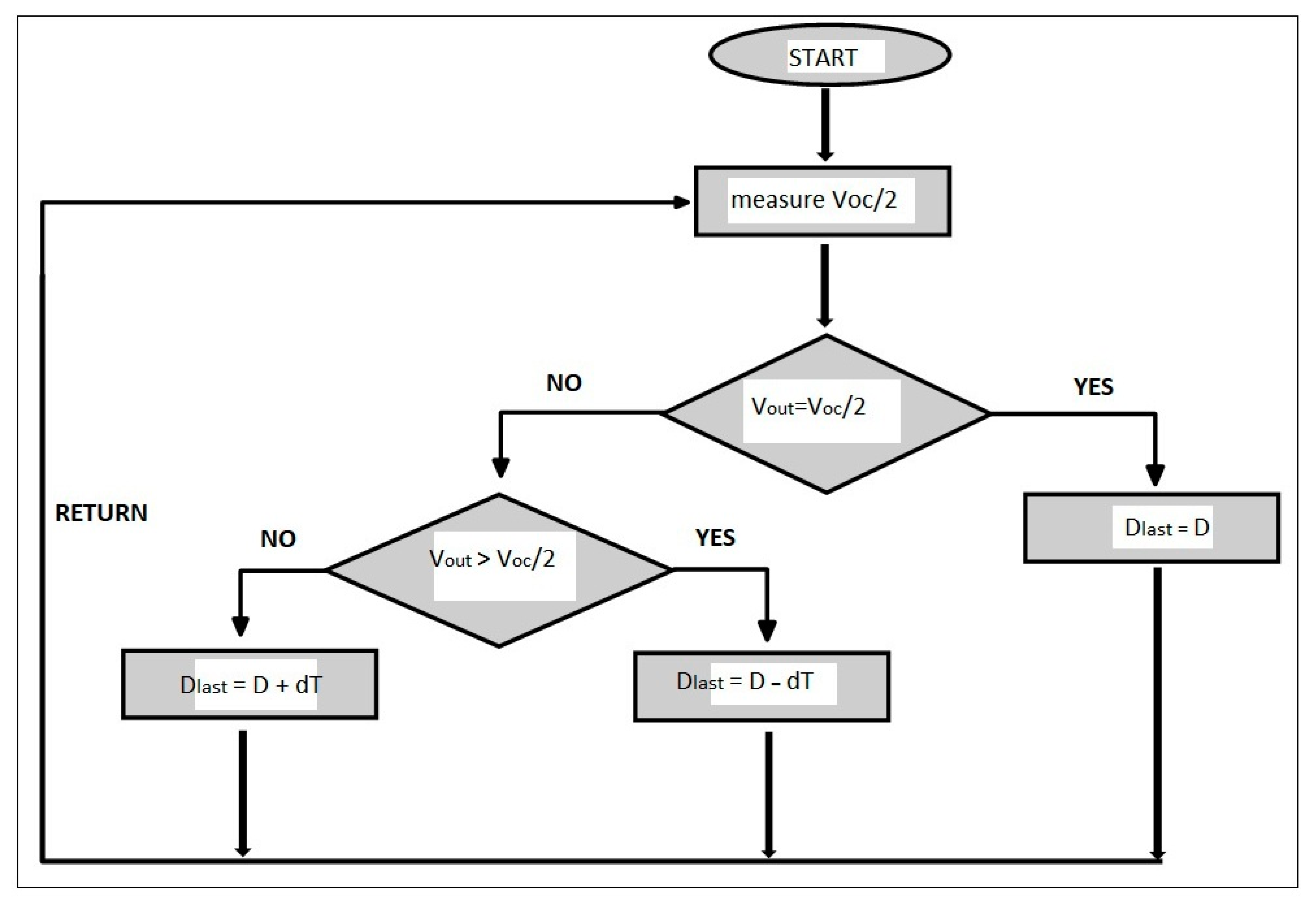
4.6. MPPT Controller
4.7. Lead-Acid Battery
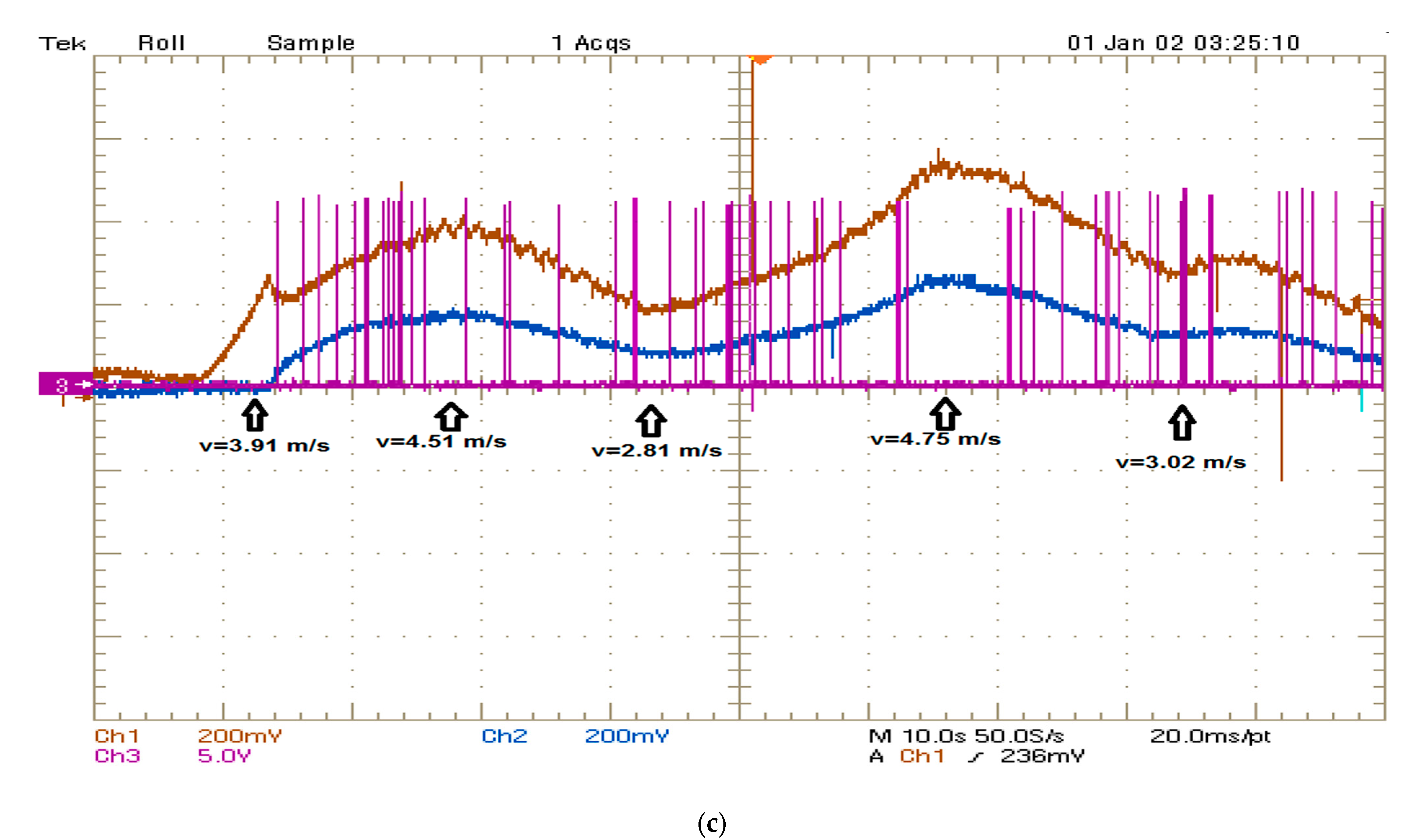
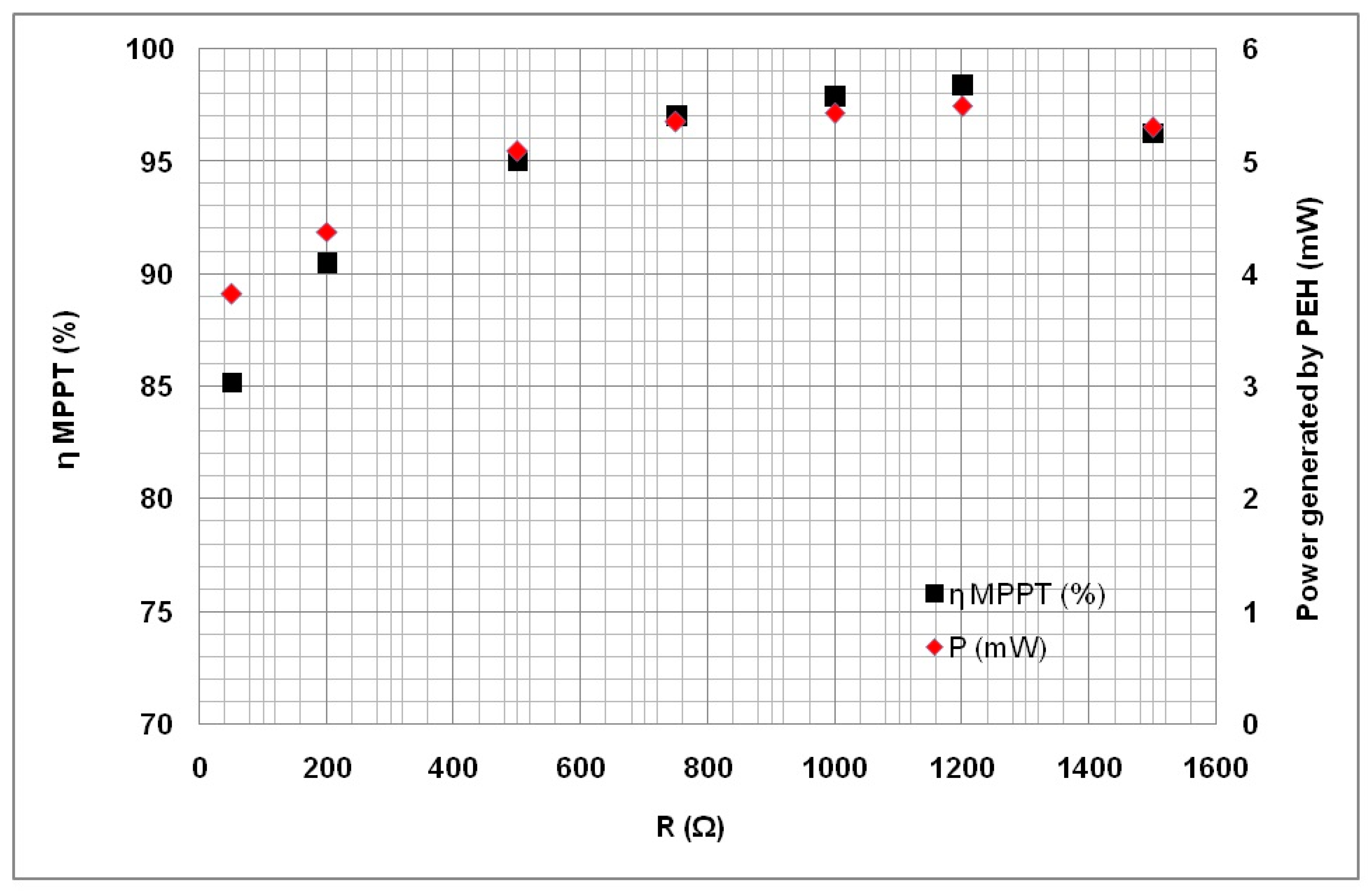
5. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bizon, N.; Tabatabaei, N.M.; Blaabjerg, F.; Kurt, E. Energy harvesting and energy efficiency. In Technology, Methods, and Applications; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Kurt, E.; Mutlu, B.; Bizon, N.; Guede, J.M.L. Design and fabrication of a new micro-power scaled electromagnetic harvester. J. Energy Syst. 2019, 3, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Kong, N.; Ha, D.S. Low-Power Design of a Self-powered Piezoelectric Energy Harvesting System with Maximum Power Point Tracking. IEEE Trans. Power Electron. 2011, 27, 2298–2308. [Google Scholar] [CrossRef]
- Kim, H.; Kim, S.; Kwon, C.-K.; Min, Y.-J.; Kim, C.; Kim, S.-W. An Energy-Efficient Fast Maximum Power Point Tracking Circuit in an 800-μW Photovoltaic Energy Harvester. IEEE Trans. Power Electron. 2013, 28, 2927–2935. [Google Scholar] [CrossRef]
- Shim, M.; Kim, J.; Jeong, J.; Park, S.; Kim, C. Self-powered 30 μW to 10 mW piezoelectric energy harvesting system with 9.09 ms/V maximum power point tracking time. IEEE J. Solid State Circ. 2015, 50, 2367–2379. [Google Scholar] [CrossRef]
- Chowdary, G.; Singh, A.; Chatterjee, S. An 18 nA, 87% Efficient Solar, Vibration and RF Energy-Harvesting Power Management System With a Single Shared Inductor. IEEE J. Solid State Circuits 2016, 51, 2501–2513. [Google Scholar] [CrossRef]
- Montecucco, A.; Knox, A.R. Maximum Power Point Tracking Converter Based on the Open-Circuit Voltage Method for Thermoelectric Generators. IEEE Trans. Power Electron. 2014, 30, 828–839. [Google Scholar] [CrossRef]
- Celik, K.; Kurt, E. A novel meander line integrated E-shaped rectenna for energy harvesting applications. Int. J. RF Microw. Comput. Aid. Eng. 2019, 29, e21627. [Google Scholar] [CrossRef]
- Shu, Y.C.; Lien, I.C.; Wu, W.J. An improved analysis of the SSHI interface in piezoelectric energy harvesting. Smart Mater. Struct. 2007, 16, 2253–2264. [Google Scholar] [CrossRef]
- Weddell, A.; Merrett, G.V.; Al-Hashimi, B.M. Photovoltaic Sample-and-Hold Circuit Enabling MPPT Indoors for Low-Power Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 59, 1196–1204. [Google Scholar] [CrossRef] [Green Version]
- Tabesh, A.; Frechette, L.G. A Low-Power Stand-Alone Adaptive Circuit for Harvesting Energy from a Piezoelectric Micropower Generator. IEEE Trans. Ind. Electron. 2010, 57, 840–849. [Google Scholar] [CrossRef] [Green Version]
- Ottman, G.K.; Hofmann, H.F.; Bhatt, A.C.; Lesieutre, G.A. Adaptive piezoelectric energy har-vesting circuit for wireless remote power supply. IEEE Trans. Power Electron. 2002, 17, 669–676. [Google Scholar] [CrossRef] [Green Version]
- Gasnier, P.; Willemin, J.; Boisseau, S.; Despesse, G.; Condemine, C.; Gouvernet, G.; Chaillout, J.J. An autonomous piezoelectric energy harvesting IC based on a synchronous multi-shot technique. IEEE J. Solid-State Circ. 2014, 49, 1561–1570. [Google Scholar] [CrossRef]
- Chew, Z.J.; Zhu, M. Adaptive maximum power point finding using direct VOC/2 tracking method with microwatt power consumption for energy harvesting. IEEE Trans. Power Electr. 2018, 33, 8164–8173. [Google Scholar] [CrossRef] [Green Version]
- Kurt, E.; Cottone, F.; Uzun, Y.; Orfei, F.; Mattarelli, M.; Özhan, D. Design and implementation of a new contactless triple piezoelectrics wind energy harvester. Int. J. Hydrog. Energy 2017, 42, 17813–17822. [Google Scholar] [CrossRef]
- Kurt, E.; Uzun, Y. Nonlinear problems in piezoelectric harvesters undermagnetic field. In Energy Harvesting and Energy Efficiency; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Uzun, Y.; Kurt, E.; Kurt, H.H. Explorations of displacement and velocity nonlinearities and their effects to power of a magnetically-excited piezoelectric pendulum. Sens. Actuators A Phys. 2015, 224, 119–130. [Google Scholar] [CrossRef]
- Celik, K.; Kurt, E.; Uzun, Y. Experimental and theoretical explorations on thebuckling piezoelectric layer under magnetic excitation. J. Electron. Mater. 2017, 46, 4003–4016. [Google Scholar] [CrossRef]
- Bouzelata, Y.; Altin, N.; Chenni, R.; Kurt, E. Exploration of optimal design and performance of a hybrid wind-solar energy system. Int. J. Hydrog. Energy 2016, 41, 12497–12511. [Google Scholar] [CrossRef]
- Bouzelata, Y.; Altin, N.; Chenni, R.; Kurt, E. Design and simulation of a unified power quality conditioner fed by solar energy. Int. J. Hydrog. Energy 2015, 40, 15267–15277. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, L.; Zheng, X.; Lv, L.; Xu, Z.; Jiang, X. Analysis, Measurement, and Compensation of the System Time Delay in a Three-Phase Voltage Source Rectifier. IEEE Trans. Power Electron. 2015, 31, 6031–6043. [Google Scholar] [CrossRef]
- Büyük, M.; Tan, A.; Tümay, M.; Bayındır, K. Çağatay Topologies, generalized designs, passive and active damping methods of switching ripple filters for voltage source inverter: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 62, 46–69. [Google Scholar] [CrossRef]
- Berzoy, A.; Elsayed, A. Mohammed, Improved design of controlled rectifier for reduced ripple resulting from integration of DC loadsto AC systems. IEEE PES Gen. Meet. Conf. Expos. 2014. [Google Scholar] [CrossRef]
- Kim, J.; Choi, J.; Hong, H. Output LC filter design of voltage source inverter considering the perfor-mance of controller. IEEE Proc. Int. Conf. Power Syst. Technol. Power. Con. 2000, 1659–1664. [Google Scholar]
- Bouzelata, Y.; Kurt, E.; Altın, N.; Chenni, R. Design and simulation of a solar supplied multifunc-tional active power filter and a comparative study on the current-detection algorithms. Ren. Sust. Energy Rev. 2015, 43, 1114–1126. [Google Scholar] [CrossRef]
- Lee, K.-M.; Lee, S.-W.; Choi, Y.-G.; Kang, B. Active Balancing of Li-Ion Battery Cells Using Transformer as Energy Carrier. IEEE Trans. Ind. Electron. 2017, 64, 1251–1257. [Google Scholar] [CrossRef]
- Uzun, Y.; Demirbaş, S.; Kurt, E. Implementation of a new contactless piezoelectric wind energy har-vester to a wireless weather station. Elektron. Elektrotech. 2014, 20, 35–39. [Google Scholar] [CrossRef]
- Faria, R.; Marques, P.; Garcia, R.; Moura, P.; Freire, F.; Delgado, J.; de Almeida, A.T. Primary and sec-ondary use of electric mobility batteries from a life cycleperspective. J. Power Sourc. 2014, 262, 169–179. [Google Scholar] [CrossRef]
- Doerffel, D.; Sharkh, S.A. A critical review of using the Peukert equation for determining the remaining capacity of lead acid and lithium-ion batteries. J. Power Sourc. 2006, 155, 395–400. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.; Soon, T.; Wahyudie, A.; Ahmed, M. Improved Proportional-Integral Coordinated MPPT Controller with Fast Tracking Speed for Grid-Tied PV Systems under Partially Shaded Conditions. Sustainability 2021, 13, 830. [Google Scholar] [CrossRef]
- Abo-Khalil, A.; Alghamdi, A. MPPT of Permanent Magnet Synchronous Generator in Tidal Energy Systems Using Support Vector Regression. Sustainability 2021, 13, 2223. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item Description | Values | ||||
|---|---|---|---|---|---|
| PZT layer parameters | 1.4 g | 26 nF | 380 N/m | 0.12 N | 275 Hz |
| Output filter, Lf, Cf | 0.7 mH | 70 mF | |||
| Buck converter Switch, Lc, Cs, Rs | MOSFET | 0.3 mH | 1.85 mF | 50 Ω | |
| MPPT controller unit Voc, Vsc, switching frequency | 72 V | 12 V | 10 KHz | ||
| Load Resistance | 1.2 kOhms | ||||
| Type of the battery | Lead-acid. | ||||
| Battery nominal voltage, Battery rated capacity | 12 V, 6.5 Ah, | ||||
| Maximum capacity, fully charged voltage | 6.825 Ah, 12.6 V | ||||
| Nominal discharge current | 0.1837 A | ||||
| Internal resistance of battery | 0.018462 Ω | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurt, E.; Özhan, D.; Bizon, N.; Lopez-Guede, J.M. Design and Implementation of a Maximum Power Point Tracking System for a Piezoelectric Wind Energy Harvester Generating High Harmonicity. Sustainability 2021, 13, 7709. https://0-doi-org.brum.beds.ac.uk/10.3390/su13147709
Kurt E, Özhan D, Bizon N, Lopez-Guede JM. Design and Implementation of a Maximum Power Point Tracking System for a Piezoelectric Wind Energy Harvester Generating High Harmonicity. Sustainability. 2021; 13(14):7709. https://0-doi-org.brum.beds.ac.uk/10.3390/su13147709
Chicago/Turabian StyleKurt, Erol, Davut Özhan, Nicu Bizon, and Jose Manuel Lopez-Guede. 2021. "Design and Implementation of a Maximum Power Point Tracking System for a Piezoelectric Wind Energy Harvester Generating High Harmonicity" Sustainability 13, no. 14: 7709. https://0-doi-org.brum.beds.ac.uk/10.3390/su13147709