
Developing a Regional Drive Cycle Using GPS-Based Trajectory Data from Rideshare Passenger Cars: A Case of Chengdu, China

Abstract
:1. Introduction
2. Literature Review
3. Data Description
4. Methodology
4.1. Data Filtering
4.1.1. Instantaneous Speed, Acceleration and Vehicle Specific Power (VSP) Calculation
4.1.2. Data Filtering Criteria
- An upper limit of 14 mph per second for acceleration.
- A lower limit of −10 mph per second for deceleration.
- An upper limit of 62.5 kW/ton for positive VSP values.
- A lower limit of −47.5 Kw/ton for negative VSP values (by deceleration).
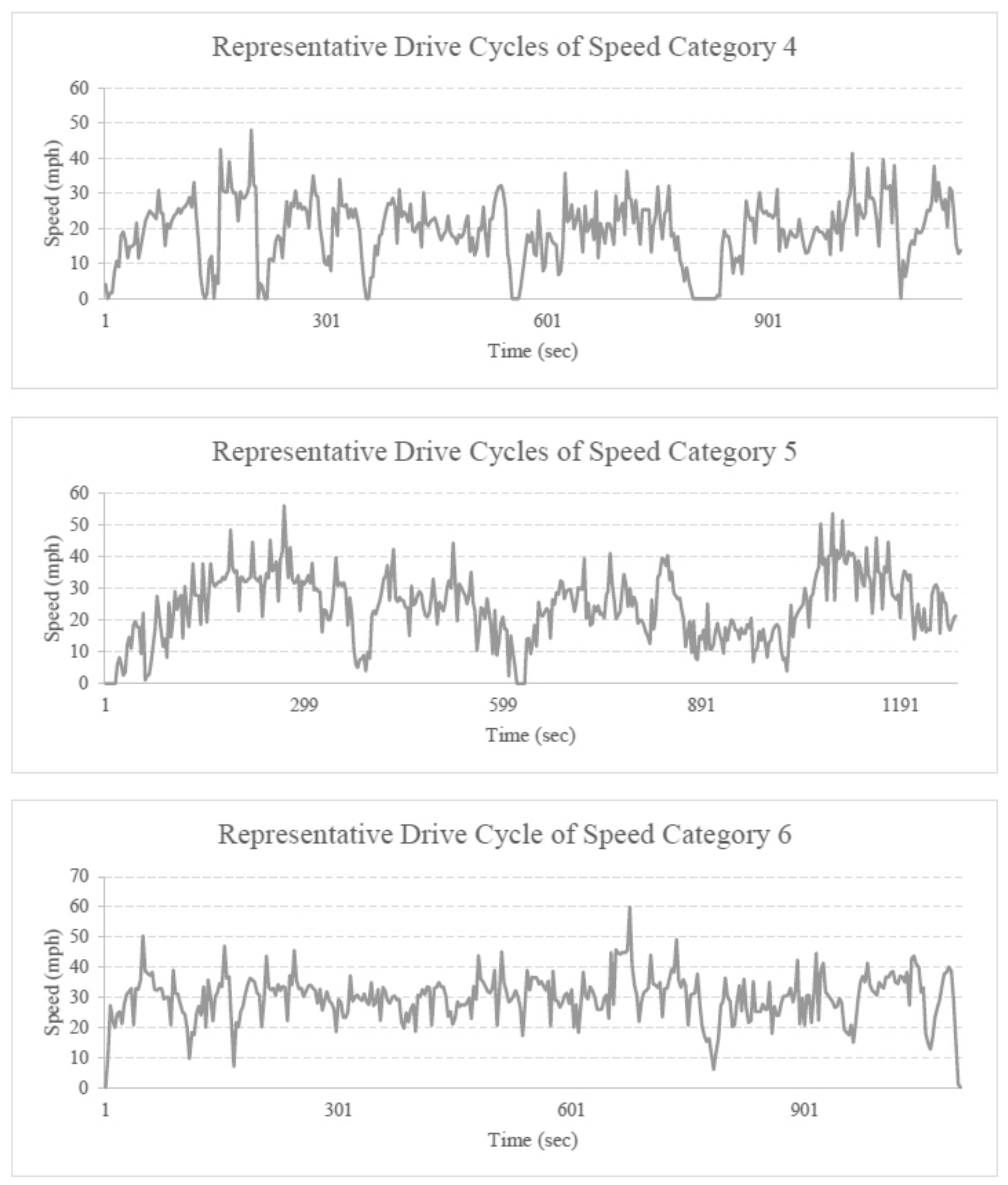
4.2. Drive Cycle Development
4.2.1. Micro-Trip Designation and Classification
- The first micro-trip starts at the beginning of a trip and ends when there is more than 30 s of consecutive completely zero speed readings; there is longer than 2 miles of distance travelled; it is the end of the trip.
- The next micro-trip starts at the end of previous micro-trip and end with the previous criteria.
- A micro-trip must have a minimum duration of 30 s of consecutive readings.
4.2.2. Micro-Trip Selection
- Select the top candidate micro-trip M1 that has the least T-M value, C = M1.
- Select the next candidate micro-trip M2 that has the least T-M value while the connection criterion is satisfied, C = M1 + M2.
- Repeat the selection step until cycle is more than 1000 s while maintaining an acceptable T-C value. .
- Make sure all notable operating modes in T exist in C. If it is, . If it is not, add the micro-trip Mj with the missing operating mode and the least T-M value to the cycle while still maintaining an acceptable T-C value. .
4.2.3. Drive Cycle Validation
- The comparison of drive cycles from same speed category and time-of-day but in different day-of-week.
- The comparison of drive cycles from same speed category and day-of-week but in different time-of-day.
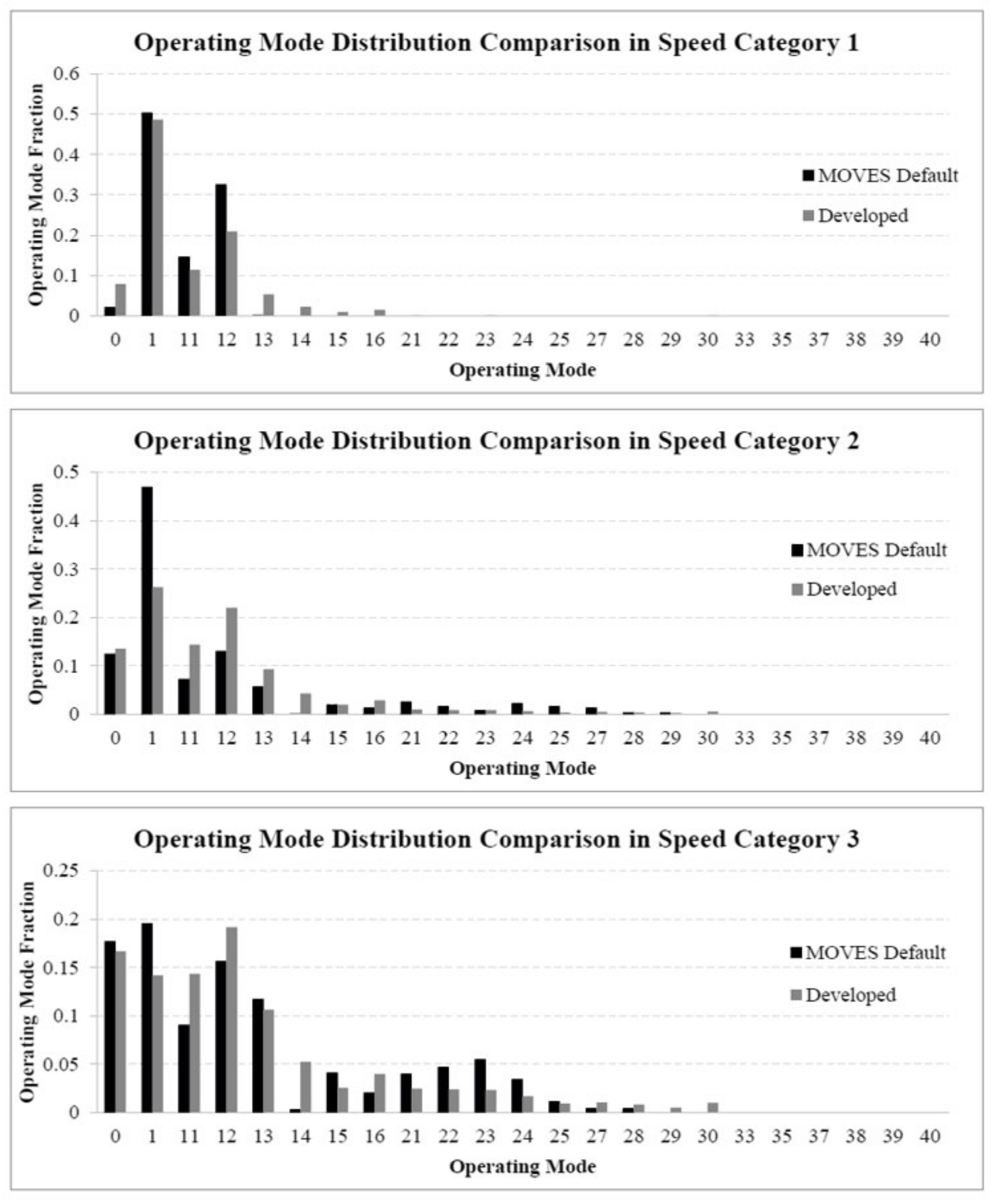
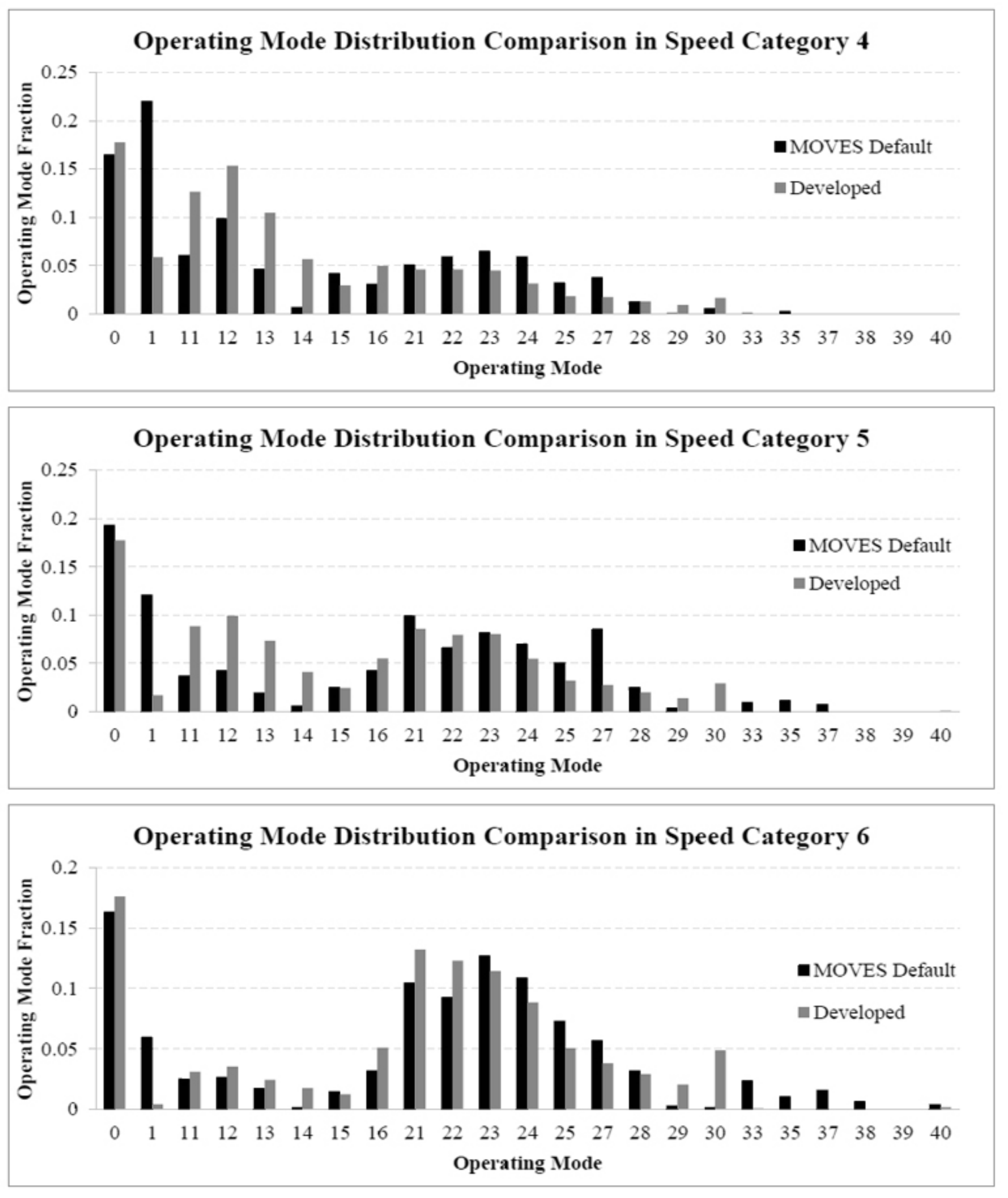
- The comparison in operating mode distributions between the representative drive cycles with the target operating mode distribution from the control group in each classification.
5. Discussion
5.1. Validation of Developed Drive Cycles with Selected Criteria
5.2. Drive Cycle Summary and Comparison with the MOVES Default Drive Cycles
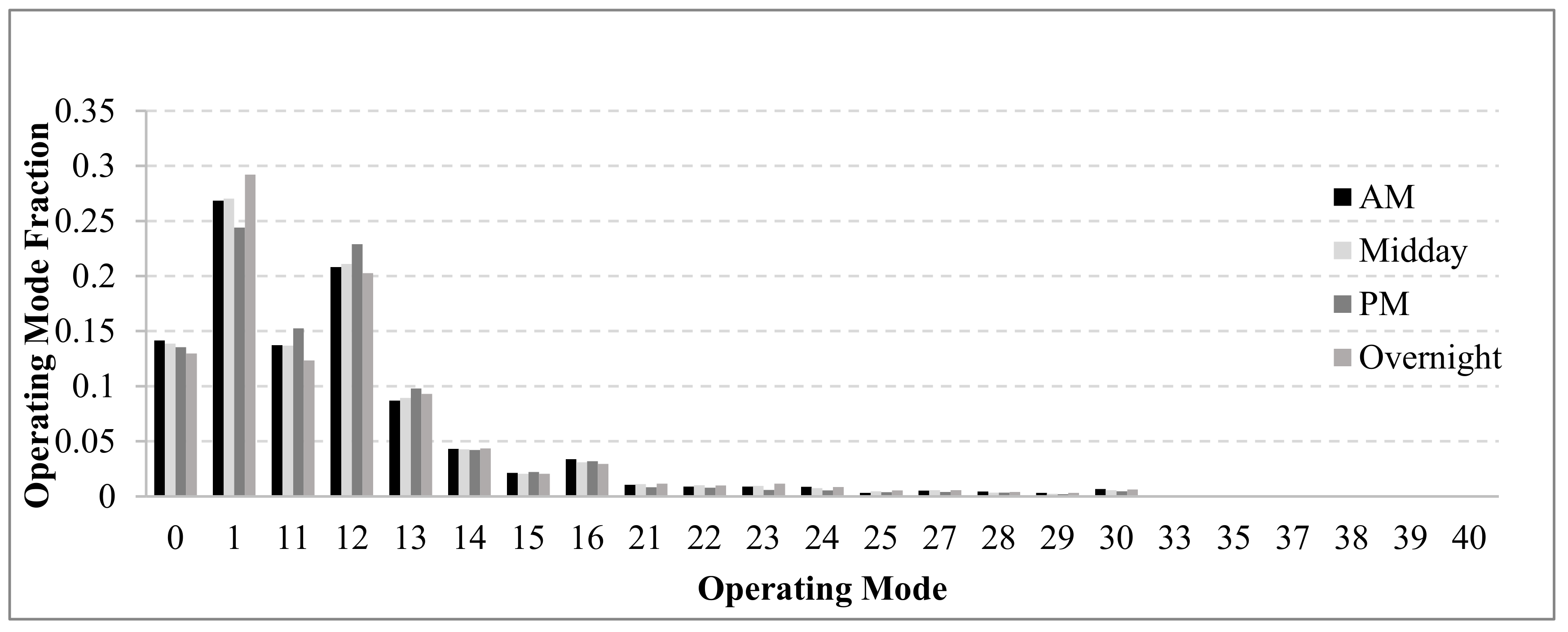
5.3. Sensitivity of Time-of-Day
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, S.; Hao, J. Air quality management in China: Issues, challenges, and options. J. Environ. Sci. 2012, 24, 2–13. [Google Scholar] [CrossRef]
- Zhang, L.; Jacob, D.J.; Boersma, K.F.; Jaffe, D.A.; Olson, J.R.; Bowman, K.W.; Worden, J.R.; Thompson, A.M.; Avery, M.A.; Cohen, R.C.; et al. Transpacific transport of ozone pollution and the effect of recent Asian emission increases on air quality in North America: An integrated analysis using satellite, aircraft, ozonesonde, and surface observations. Atmos. Chem. Phys. Discuss. 2008, 8, 8143–8191. [Google Scholar]
- Facanha, C.; Horvath, A. Evaluation of life-cycle air emission factors of freight transportation. Environ. Sci. Technol. 2007, 41, 7138–7144. [Google Scholar] [CrossRef] [PubMed]
- Alessandrini, A.; Orecchini, F. A driving cycle for electrically-driven vehicles in Rome. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2003, 217, 781–789. [Google Scholar] [CrossRef]
- Esteves-Booth, A.; Muneer, T.; Kubie, J.; Kirby, H. A review of vehicular emission models and driving cycles. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2002, 216, 777–797. [Google Scholar] [CrossRef]
- Weiss, M.; Bonnel, P.; Hummel, R.; Manfredi, U.; Colombo, R.; Lanappe, G.; Le Lijour, P.; Sculati, M. Analyzing on-road emissions of light-duty vehicles with Portable Emission Measurement Systems (PEMS). JRC Sci. Techn. Rep. EUR 2011, 24697. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.204.5287&rep=rep1&type=pdf (accessed on 20 October 2020).
- Papson, A.; Hartley, S.; Kuo, K.-L. Analysis of emissions at congested and uncongested intersections with motor vehicle emission simulation 2010. Transp. Res. Rec. 2012, 2270, 124–131. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Naghizadeh, M. Development of car drive cycle for simulation of emissions and fuel economy. In Proceedings of the 15th European Simulation Symposium, Delft, The Netherlands, 26–29 October 2003. [Google Scholar]
- Cai, H.; Jia, X.; Chiu, A.S.F.; Hu, X.; Xu, M. Siting public electric vehicle charging stations in Beijing using big-data informed travel patterns of the taxi fleet. Transp. Res. Part D Transp. Environ. 2014, 33, 39–46. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Pu, Z.; Li, Y.; Ban, X. Characterization of Ridesplitting Based on Observed Data: A Case Study of Chengdu, China. Transp. Res. Part C Emerg. Technol. 2019, 100, 330–353. [Google Scholar] [CrossRef]
- Wang, H.; Chen, C.; Huang, C.; Fu, L. On-road vehicle emission inventory and its uncertainty analysis for Shanghai, China. Sci. Total Environ. 2018, 398, 60–67. [Google Scholar] [CrossRef] [PubMed]
- GAIA Open Dataset. Available online: https://outreach.didichuxing.com/research/opendata/en/ (accessed on 21 January 2021).
- Yu, L.; Wang, Z.; Shi, Q. PEMS-Based Approach to Developing and Evaluating Driving Cycles for Air Quality Assessment; Texas Southern University: Houston, TX, USA, 2010. [Google Scholar]
- Tzirakis, E.; Pitsas, K.; Zannikos, F.; Stournas, S. Vehicle emissions and driving cycles: Comparison of the Athens driving cycle (ADC) with ECE-15 and European driving cycle (EDC). Glob. NEST J. 2006, 8, 282–290. [Google Scholar]
- Technical Standard for 10.15-Mode Exhaust Emission Measurement for Gasoline-Fueled Motor Vehiclesle. Available online: https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules#japanese (accessed on 21 January 2021).
- Austin, T.C.; DiGenova, F.J.; Carlson, T.R.; Joy, R.W.; Gianolini, K.A. Characterization of Driving Patterns and Emissions from Light-Duty Vehicles in California; Final Report. No. PB-94-157005/XAB; Sierra Research, Inc.: Sacramento, CA, USA, 1993. [Google Scholar]
- Farzaneh, M.; Zietsman, J.A.; Lee, D.; Johnson, J.; Wood, N.; Ramani, T.; Gu, C. Texas-Specific Drive Cycles and Idle Emissions Rates for Using with EPA’s MOVES Model—Final Report; Texas Department of Transportation: Austin, TX, USA, 2014. [Google Scholar]
- Pu, Z.; Zhu, M.; Li, W.; Cui, Z.; Guo, X.; Wang, Y. Monitoring Public Transit Ridership Flow by Passively Sensing Wi-Fi and Bluetooth Mobile Devices. IEEE Internet Things J. 2021, 8, 474–486. [Google Scholar] [CrossRef]
- Carlson, T.R.; Austin, R.C. Development of Speed Correction Cycles; Report SR97-04-01; Sierra Research Inc.: Sacramento, CA, USA, 1996. [Google Scholar]
- Morey, J.E.; Limanond, T.; Niemeier, D.A. Validity of chase car data used in developing emissions cycles. Stat. Anaysis Model. Automot. Emiss. 2001, 3, 15–28. [Google Scholar]
- Niemeier, D.A.; Limanond, T.; Morey, J.E. Data Collection for Driving Cycle Development: Evaluation of Data Collection Protocols; Institute of Transportation Studies, University of California at Davis: Davis, CA, USA, 1999. [Google Scholar]
- Jackson, E.; Aultman-Hall, L.; Holmén, B.A.; Du, J. Evaluating the ability of global positioning system receivers to measure a real-world operating mode for emissions research. Transp. Res. Rec. 2005, 1941, 43–50. [Google Scholar] [CrossRef]
- Wang, Q.; Huo, H.; He, K.; Yao, Z.; Zhang, Q. Characterization of vehicle driving patterns and development of driving cycles in Chinese cities. Transp. Res. Part D Transp. Environ. 2008, 13, 289–297. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, X.; Ouyang, M. Energy consumption of electric vehicles based on real-world driving patterns: A case study of Beijing. Appl. Energy 2015, 157, 710–719. [Google Scholar] [CrossRef]
- Eastern Research Group. Roadway-Specific Driving Schedules for Heavy-Duty Vehicle; Prepared for EPA; Eastern Research Group: Lexington, MA, USA, 2003. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Field | Type | Sample | Comment |
|---|---|---|---|---|
| Route Data | Driver ID | String | glox.jrrlltBMvCh8nxqktdr2dtopmlH | Anonymized |
| Order ID | String | jkkt8kxniovIFuns9qrrlvst@iqnpkwz | Anonymized | |
| Time Stamp | String | 1501584540 | Unix timestamp, in seconds | |
| Longitude | String | 104.04392 | GCJ-02 Coordinate System | |
| Latitude | String | 104.04392 | GCJ-02 Coordinate System | |
| Ride Data | Order ID | String | jkkt8kxniovIFuns9qrrlvst@iqnpkwz | Anonymized |
| Ride Start Time | String | 1501581031 | Unix timestamp, in seconds | |
| Ride Stop Time | String | 1501582195 | Unix timestamp, in seconds | |
| Pick-up Longitude | String | 104.11225 | GCJ-02 Coordinate System | |
| Pick-up Latitude | String | 30.66703 | GCJ-02 Coordinate System | |
| Drop-off Longitude | String | 104.07403 | GCJ-02 Coordinate System | |
| Drop-off Latitude | String | 30.6863 | GCJ-02 Coordinate System |
| Speed Category | Expected Average Speed of the Category (mph) | Speed Category Criteria (mph) |
|---|---|---|
| 1 | <5 | (0, 7.5) |
| 2 | 10 | (7.5, 12.5) |
| 3 | 15 | (12.5, 17.5) |
| 4 | 20 | (17.5, 22.5) |
| 5 | 25 | (22.5, 27.5) |
| 6 | 30 | (27.5, 35) |
| Braking (Bin 0) | |||
|---|---|---|---|
| Idle (Bin 1) | |||
| VSP (kW/ton) \Instantaneous Speed (mph) | 0–25 | 25–50 | >50 |
| <0 | Bin 11 | Bin 21 | - |
| 0 to 3 | Bin 12 | Bin 22 | - |
| 3 to 6 | Bin 13 | Bin 23 | - |
| 6 to 9 | Bin 14 | Bin 24 | - |
| 9 to 12 | Bin 15 | Bin 25 | - |
| 12 and greater | Bin 16 | - | - |
| <6 | Bin 33 | ||
| 6 to 12 | - | - | Bin 35 |
| 12 to 18 | - | Bin 27 | Bin 37 |
| 18 to 24 | - | Bin 28 | Bin 38 |
| 24 to 30 | - | Bin 29 | Bin 39 |
| 30 and greater | - | Bin 30 | Bin 40 |
| Speed Category | AM Peak | Midday | PM Peak | Overnight |
|---|---|---|---|---|
| 1 | 0.045 | 0.022 | 0.047 | 0.023 |
| 2 | 0.014 | 0.013 | 0.058 | 0.041 |
| 3 | 0.023 | 0.022 | 0.049 | 0.043 |
| 4 | 0.053 | 0.013 | 0.036 | 0.042 |
| 5 | 0.030 | 0.013 | 0.051 | 0.014 |
| 6 | 0.038 | 0.051 | 0.046 | 0.017 |
| Speed Category | Drive Cycle Description | Duration (sec) | Distance (mile) | Maximum Speed (mph) | Average Speed (mph) | Maximum Acceleration (mph/s) | Maximum Deceleration (mph/s) | Idle Percentage (%) | Difference in Operating Mode Distribution |
|---|---|---|---|---|---|---|---|---|---|
| 1 | MOVES | 602 | 0.4 | 10 | 2.5 | 2.4 | −2.5 | 50.3 | 0.147 |
| Developed | 1044 | 1.2 | 26.4 | 3.9 | 7.8 | −5.1 | 48.6 | ||
| 2 | MOVES | 853 | 2.1 | 44.2 | 8.7 | 5.1 | −5 | 46.9 | 0.245 |
| Developed | 1.135 | 2.9 | 40.0 | 9.2 | 6.9 | −8.4 | 26.2 | ||
| 3 | MOVES | 870 | 3.8 | 37.9 | 15.7 | 4.8 | −5.4 | 19.5 | 0.111 |
| Developed | 1141 | 4.7 | 35.2 | 14.9 | 7.9 | −7.6 | 14.2 | ||
| 4 | MOVES | 709 | 3.7 | 50.3 | 18.6 | 5.8 | −8.2 | 22.0 | 0.205 |
| Developed | 1162 | 6.2 | 48.1 | 19.3 | 7.0 | −6.3 | 5.9 | ||
| 5 | MOVES | 513 | 3.6 | 53.1 | 25.4 | 5.5 | −7.5 | 12.1 | 0.163 |
| Developed | 1273 | 8.6 | 56.2 | 24.1 | 6.4 | −9.1 | 1.7 | ||
| 6 | MOVES | 754 | 6.5 | 63.8 | 31.0 | 5.7 | −5.8 | 6.0 | 0.103 |
| Developed | 1102 | 9.2 | 59.9 | 29.8 | 7.3 | −7.4 | 0.4 |
| Day of Week | Speed Category | ||||||
|---|---|---|---|---|---|---|---|
| Weekday | 1 | 0.018 | 0.045 | 0.046 | 0.031 | 0.061 | 0.071 |
| 2 | 0.006 | 0.038 | 0.031 | 0.037 | 0.029 | 0.067 | |
| 3 | 0.014 | 0.043 | 0.034 | 0.039 | 0.033 | 0.065 | |
| 4 | 0.024 | 0.033 | 0.030 | 0.035 | 0.025 | 0.055 | |
| 5 | 0.034 | 0.047 | 0.026 | 0.016 | 0.031 | 0.033 | |
| 6 | 0.028 | 0.054 | 0.042 | 0.029 | 0.025 | 0.037 | |
| Weekend | 1 | 0.050 | 0.051 | 0.033 | 0.018 | 0.022 | 0.044 |
| 2 | 0.055 | 0.057 | 0.055 | 0.033 | 0.014 | 0.037 | |
| 3 | 0.035 | 0.063 | 0.026 | 0.028 | 0.024 | 0.047 | |
| 4 | 0.071 | 0.061 | 0.039 | 0.024 | 0.049 | 0.071 | |
| 5 | 0.041 | 0.039 | 0.029 | 0.021 | 0.030 | 0.028 | |
| 6 | 0.048 | 0.049 | 0.046 | 0.030 | 0.053 | 0.047 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, B.; Wu, Z.; Gu, C.; Ji, K.; Xu, J. Developing a Regional Drive Cycle Using GPS-Based Trajectory Data from Rideshare Passenger Cars: A Case of Chengdu, China. Sustainability 2021, 13, 2114. https://0-doi-org.brum.beds.ac.uk/10.3390/su13042114
Han B, Wu Z, Gu C, Ji K, Xu J. Developing a Regional Drive Cycle Using GPS-Based Trajectory Data from Rideshare Passenger Cars: A Case of Chengdu, China. Sustainability. 2021; 13(4):2114. https://0-doi-org.brum.beds.ac.uk/10.3390/su13042114
Chicago/Turabian StyleHan, Bing, Ziheng Wu, Chaoyi Gu, Kui Ji, and Jiangang Xu. 2021. "Developing a Regional Drive Cycle Using GPS-Based Trajectory Data from Rideshare Passenger Cars: A Case of Chengdu, China" Sustainability 13, no. 4: 2114. https://0-doi-org.brum.beds.ac.uk/10.3390/su13042114