Application of a Three-Dimensional Radiative Transfer Model to Retrieve the Species Composition of a Mixed Forest Stand from Canopy Reflected Radiation



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. The 3D Model Description
2.2. Scenarios of Numerical Experiments
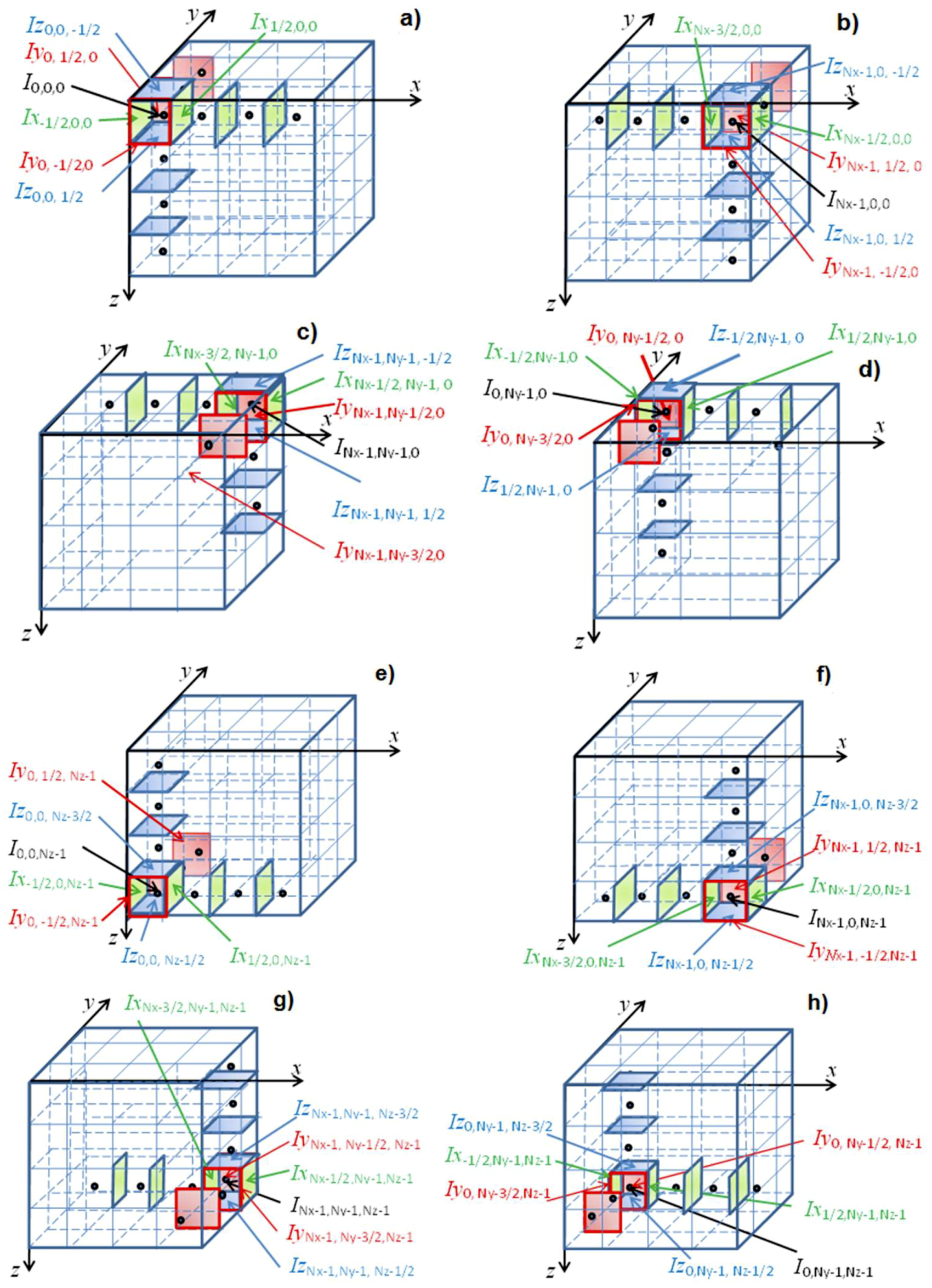
2.3. The Numerical Scheme
2.4. The Inverse Problem Statement to Retrieve the Forest Species Composition
2.5. The Model Algorithm for Inverse Problem Solving
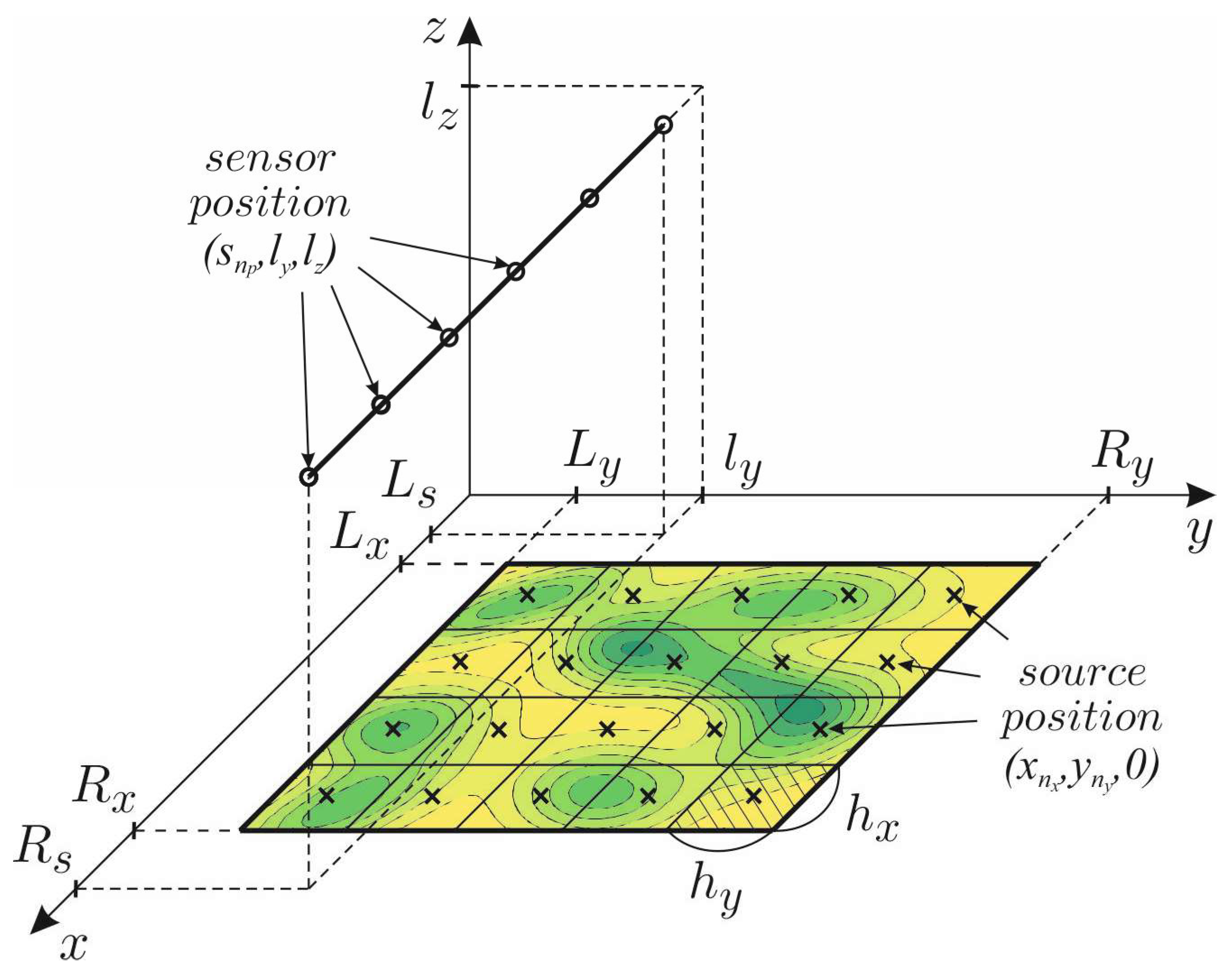
2.6. Modeling Design for Inverse Problem Solution
3. Results and Discussion
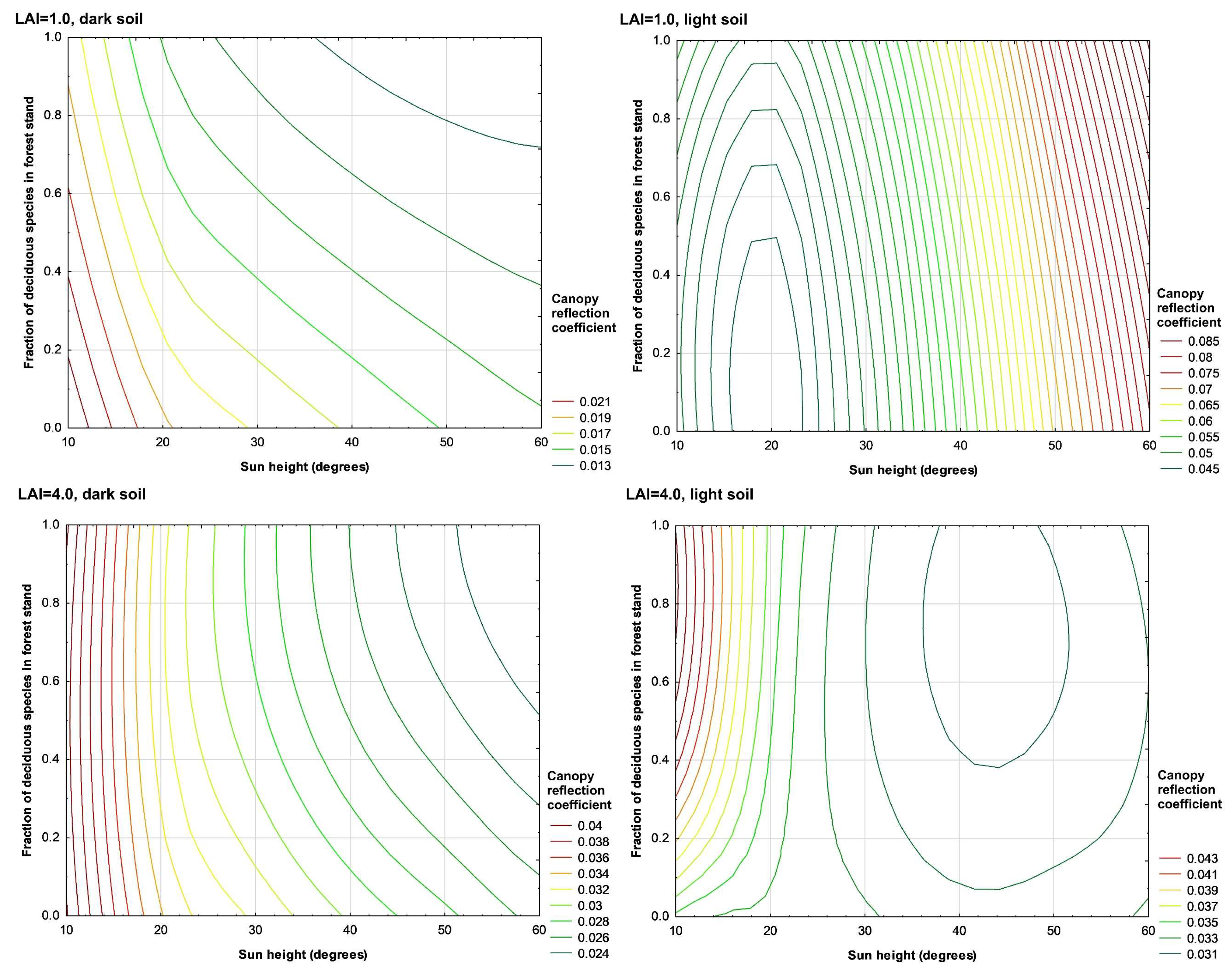
3.1. Reflection of PAR for Mixed Forest Stand
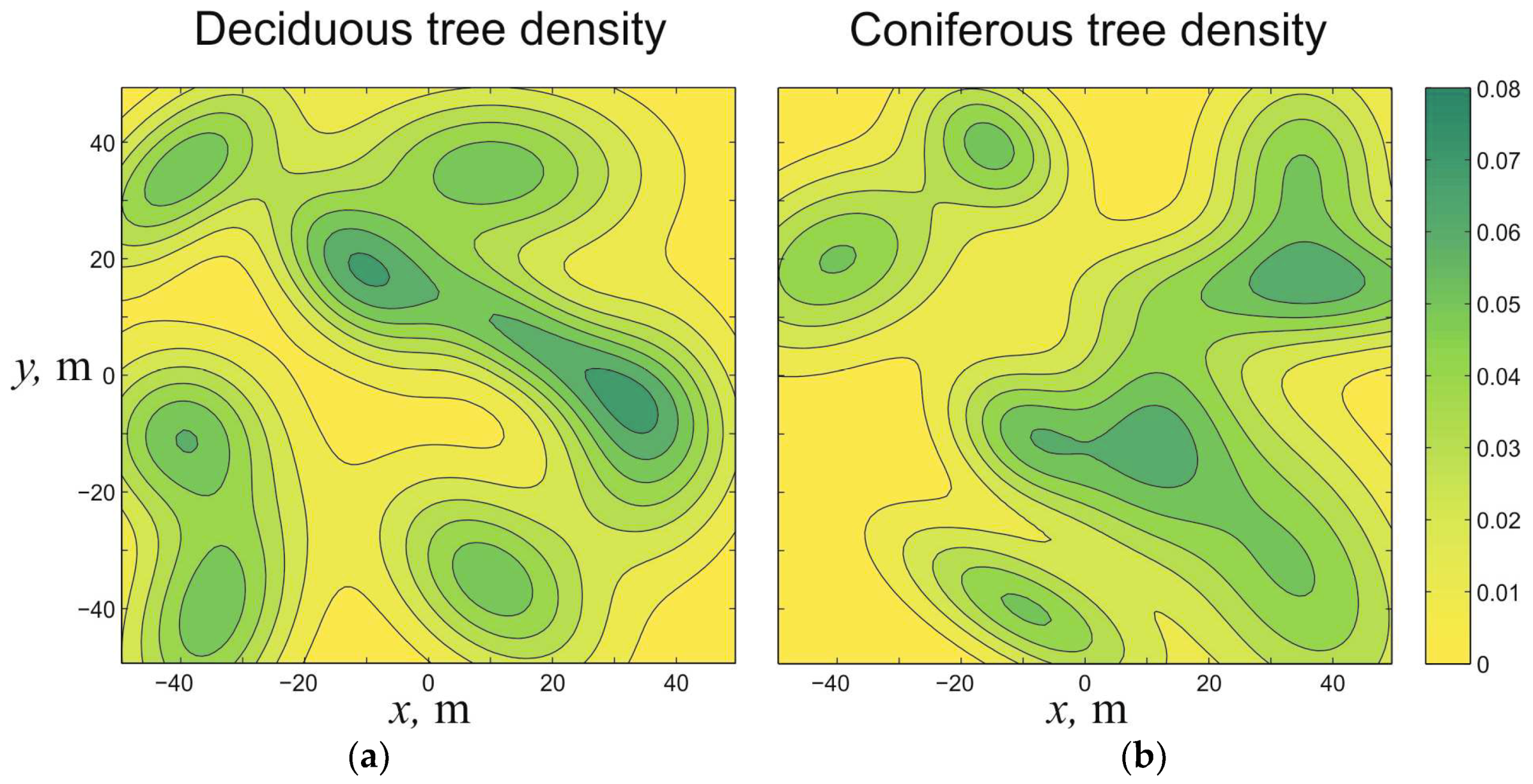
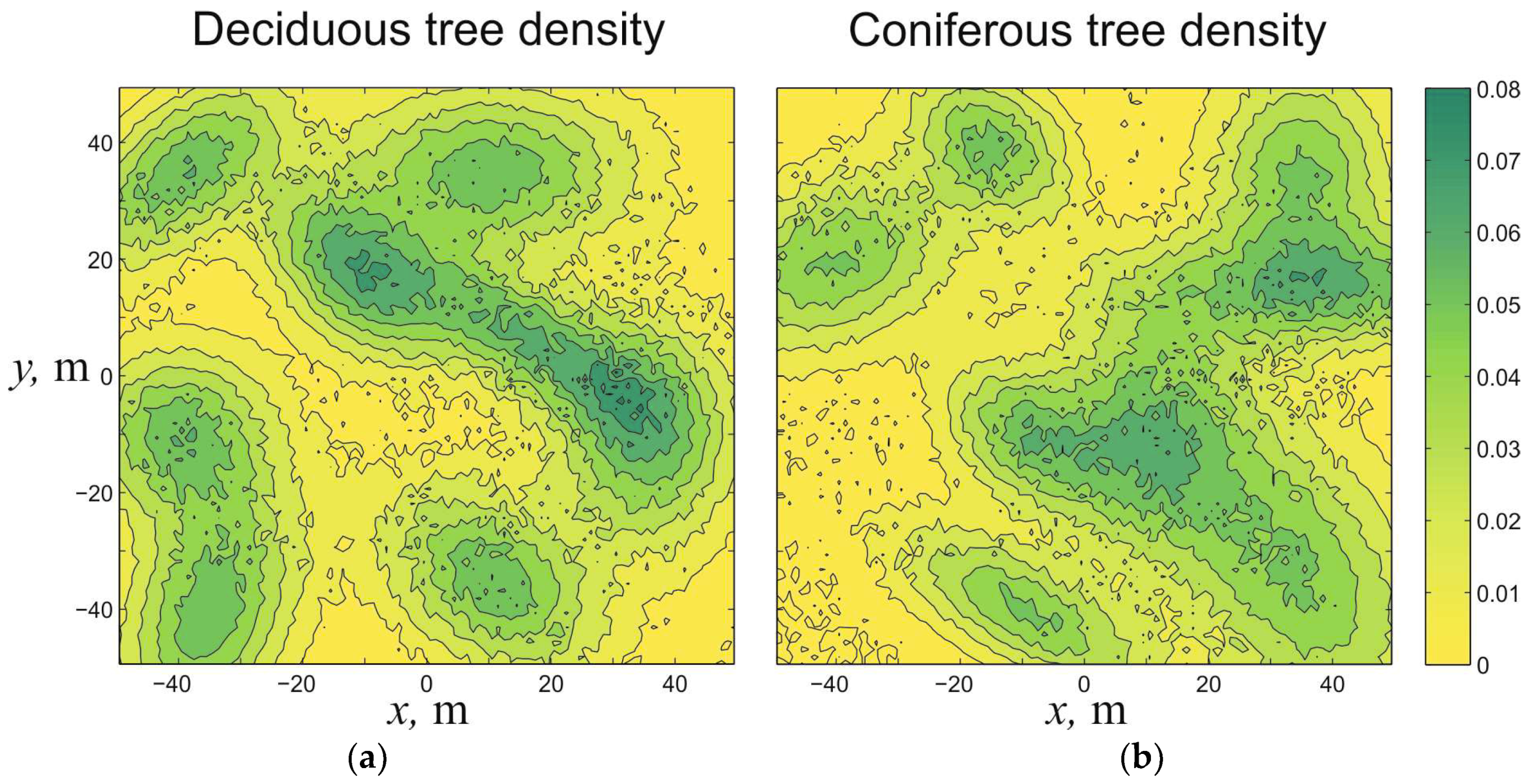
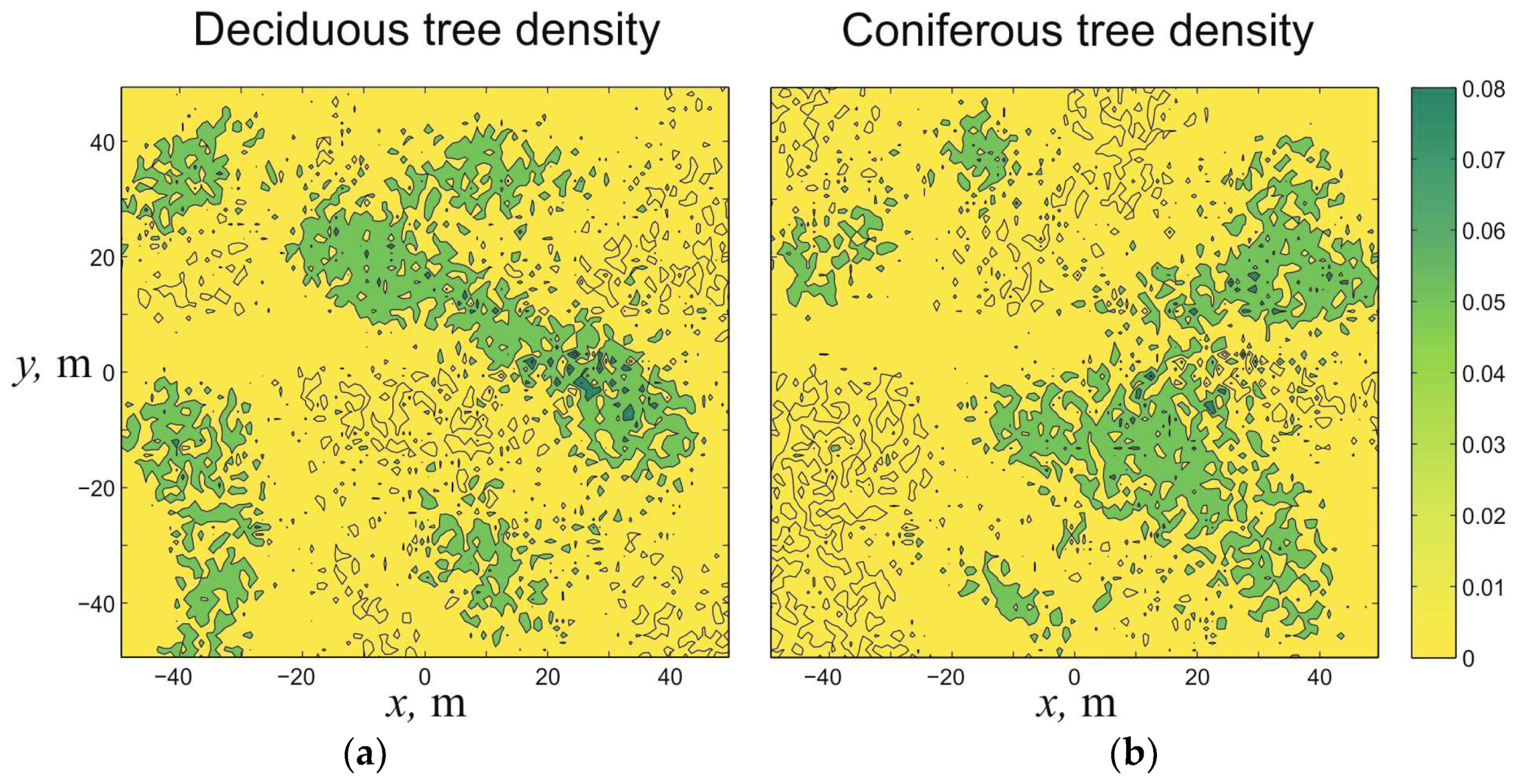
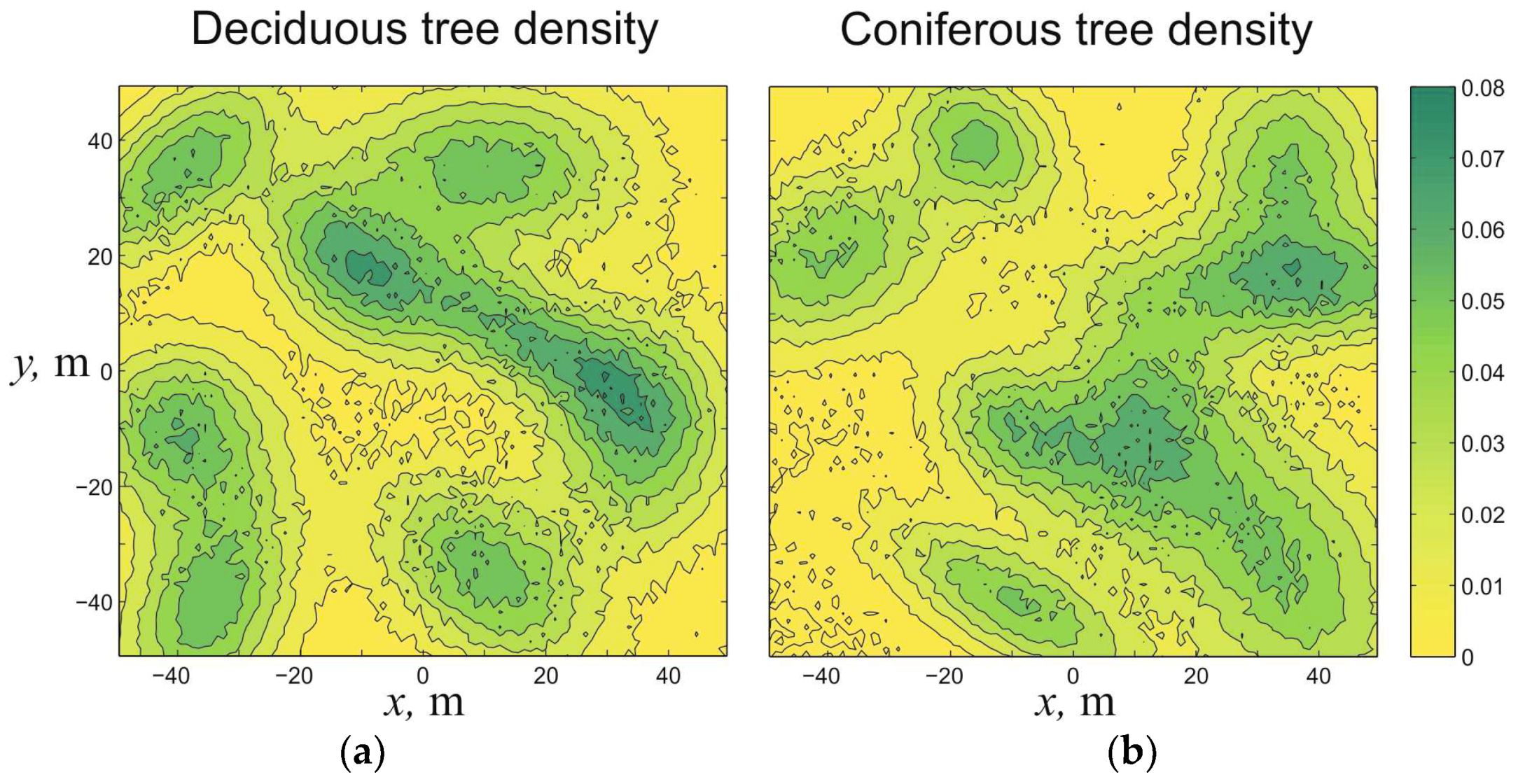
3.2. Retrieving Species Composition of a Mixed Forest Stand from Canopy Reflectance Properties
3.3. Other Possible Ways to Reconstruct the Proportions of Different Tree Species in a Mixed Forest from Canopy Reflection Using the 3D Model
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Algorithms for Calculation of the Total Cross-Section of the Interaction of Sunbeams with Vegetation Elements and the Differential Cross-Section for Sunbeam Scattering
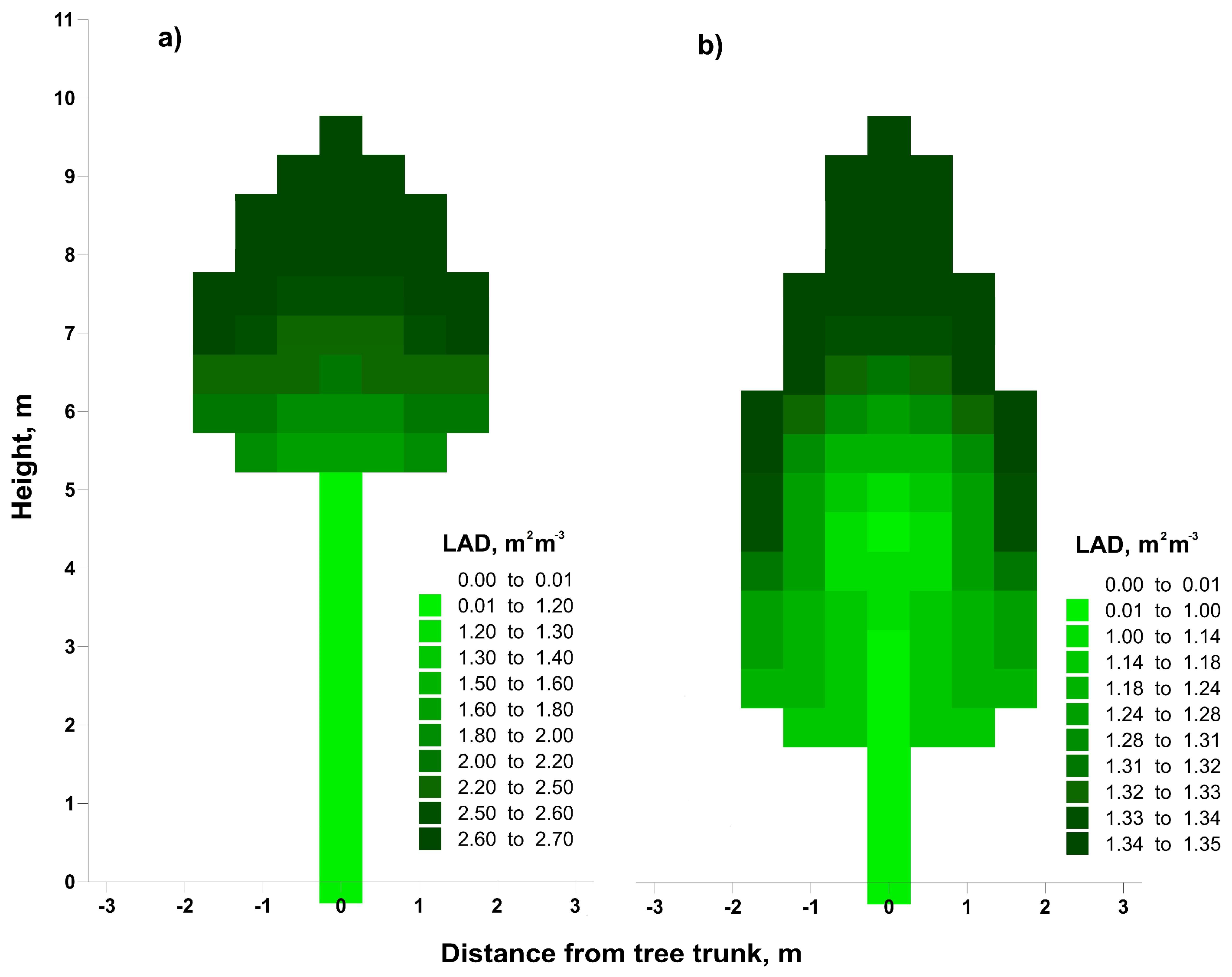
Appendix B. Parameterization of Tree Crown Structure
References
- Ross, J. The Radiation Regime and Architecture of Plant Stands; Dr. W. Junk Publishers: The Hague, The Netherlands, 1981; 390p, ISBN-13 978-94-009-8649-7. [Google Scholar]
- Ruimy, A.; Jarvis, P.G.; Baldocchi, D.D.; Saugier, B. CO2 fluxes over plant canopies and solar radiation: A review. Adv. Ecol. Res. 1995, 26, 1–68. [Google Scholar] [CrossRef]
- Forster, P. Inference of climate sensitivity from analysis of earth’s energy budget. Annu. Rev. Earth Planet. Sci. 2016, 44, 85–106. [Google Scholar] [CrossRef]
- Armour, K. Energy budget constraints on climate sensitivity in light of inconstant climate feedbacks. Nat. Clim. Chang. 2017, 7, 331–335. [Google Scholar] [CrossRef]
- Nilson, T. Approximate analytical methods for calculating the reflection functions of leaf canopies in remote sensing applications. In Photon Vegetation Interactions. Applications in Optical Remote Sensing and Plant Ecology; Myneni, R., Ross, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1991; pp. 161–190, ISBN-13 978-3-642-75391-6. [Google Scholar]
- Verstraete, M.M. Radiation transfer in plant canopies: Transmission of direct solar radiation and the role of leaf orientation. J. Geophys. Rev. 1987, 92, 10985–10995. [Google Scholar] [CrossRef]
- Myneni, R.; Ross, J.; Asrar, G. A review on the theory of photon transport in leaf canopies. Agric. For. Meteorol. 1989, 45, 1–153. [Google Scholar] [CrossRef]
- Knyazikhin, Y.; Marshak, A. Fundamental equations of radiative transfer in leaf canopies, and iterative methods of their solution. In Photon Vegetation Interactions. Applications in Optical Remote Sensing and Plant Ecology; Myneni, R., Ross, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1991; pp. 9–43, ISBN-13 978-3-642-75391-6. [Google Scholar]
- Myneni, R.B. Modelling radiative transfer and photosynthesis in three dimensional vegetation canopies. Agric. For. Meteorol. 1991, 55, 323–344. [Google Scholar] [CrossRef]
- Kuusk, A. Canopy radiative transfer modeling. In Comprehensive Remote Sensing; Liang, S., Ed.; Terrestrial Ecosystems, Elsevier: Oxford, UK, 2018; Volume 3, pp. 9–22. ISBN 9780128032206. [Google Scholar]
- Kuusk, A.; Nilson, T. A directional multispectral forest reflectance model. Remote Sens. Environ. 2000, 72, 244–252. [Google Scholar] [CrossRef]
- Disney, M.; Lewis, P.; North, P. Monte Carlo ray tracing in optical canopy reflectance modelling. Remote Sens. Rev. 2000, 18, 163–196. [Google Scholar] [CrossRef]
- Kuusk, A. A two-layer canopy reflectance model. J. Quant. Spectrosc. Radiat. Transfer 2001, 71, 1–9. [Google Scholar] [CrossRef]
- Verhoef, W.; Bach, H. Simulation of hyperspectral and directional radiance images using coupled biophysical and atmospheric radiative transfer models. Remote Sens. Environ. 2003, 87, 23–41. [Google Scholar] [CrossRef]
- Pinty, B.; Lavergne, T.; Dickinson, R.; Widlowski, J.; Gobron, N.; Verstraete, M. Simplifying the interaction of land surfaces with radiation for relating remote sensing products to climate models. Atmospheres 2006, 111, D02116. [Google Scholar] [CrossRef]
- Widlowski, J.L.; Taberner, M.; Pinty, B.; Bruniquel-Pinel, V.; Disney, M.; Fernandes, R.; Gastellu-Etchegorry, J.P.; Gobron, N.; Kuusk, A.; Lavergne, T.; et al. Third radiation transfer model intercomparison (RAMI) exercise: Documenting progress in canopy reflectance models. Atmospheres 2007, 112, D09111. [Google Scholar] [CrossRef]
- Widlowski, J.L.; Pinty, B.; Clerici, M.; Dai, Y.; De Kauwe, M.; de Ridder, K.; Kallel, A.; Kobayashi, H.; Lavergne, T.; Ni-Meister, W.; Olchev, A.; et al. RAMI4PILPS. An Intercomparison of Formulations for the Partitioning of Solar Radiation in Land Surface Models. Geophys. Res. 2011, 116, G02019. [Google Scholar] [CrossRef]
- Meador, W.E.; Weaver, W.R. Two-stream approximations to radiative transfer in planetary atmospheres: A unified description of existing methods and a new improvement. J. Atmos. Sci. 1980, 37, 630–643. [Google Scholar] [CrossRef]
- Dickinson, R.E. Land surface processes and climate-surface albedos and energy balance. Adv. Geophys. 1983, 25, 305–353. [Google Scholar] [CrossRef]
- Goel, N. Models of vegetation canopy reflectance and their use in estimation of biophysical parameters from reflectance data. Remote Sens. Rev. 1988, 4, 1–212. [Google Scholar] [CrossRef]
- Knyazikhin, Yu.; Kranigk, J.; Miessen, G.; Panfyorov, O.; Vygodskaya, N.; Gravenhorst, G. Modelling three-dimensional distribution of photosynthetically active radiation in sloping coniferous stands. Biomass Bioenergy 1996, 11, 189–200. [Google Scholar] [CrossRef]
- Knyazikhin, Yu.; Miessen, G.; Panfyorov, O.; Gravenhorst, G. Small-scale study of three-dimensional distribution of photosynthetically active radiation in a forest. Agric. For. Meteorol. 1997, 88, 215–239. [Google Scholar] [CrossRef]
- Gravenhorst, G.; Knyazikhin, Yu.; Kranigk, J.; Mießen, G.; Panfyorov, O.; Schnitzler, K.G. Is forest albedo measured correctly? Meteorol. Z. 1999, 8, 107–114. [Google Scholar] [CrossRef]
- Pinty, B.; Gobron, N.; Widlowski, J.L.; Gerstl, S.A.; Verstraete, M.M.; Antunes, M.; Bacour, C.; Gaston, F.; Gastellu, J.P.; Goel, N.; et al. Radiation transfer model intercomparison (RAMI) exercise. Atmospheres 2001, 106, 11937–11956. [Google Scholar] [CrossRef] [Green Version]
- Asrar, G. and Myneni, R.B. Applications of Radiative Transfer Models for Remote Sensing of Vegetation Conditions and States. In Photon-Vegetation Interactions: Applications in Optical Remote Sensing and Plant Physiology; Myneni, R.B., Ross, J., Eds.; Springer: Berlin & Heidelberg, Germany, 1991; pp. 539–557. [Google Scholar]
- Nilson, T.; Ross, J. Modeling radiative transfer through forest canopies: Implications for canopy photosynthesis and remote sensing. In The Use of Remote Sensing in the Modeling of Forest Productivity; Gholz, H., Nakane, K., Shimoda, H., Eds.; Kluwer: Dordrecht, The Netherlands, 1997; pp. 23–60. ISBN 978-94-010-6290-9. [Google Scholar]
- Marshak, A.; Knyazikhin, Y. The spectral invariant approximation within canopy radiative transfer to support the use of the EPIC/DSCOVR oxygen B-band for monitoring vegetation. J. Quant. Spectrosc. Radiat. Trans. 2017, 191, 7–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, B.; Knyazikhin, Y.; Mõttus, M.; Rautiainen, M.; Stenberg, P.; Yan, L.; Chen, C.; Yan, K.; Choi, S.; Park, T.; Myneni, R.B. Estimation of leaf area index and its sunlit portion from DSCOVR EPIC data: Theoretical basis. Remote Sens. Environ. 2017, 198, 69–84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, W.; Ciais, P.; Wang, Y.; Yin, Y.; Peng, S.; Zhu, Z.; Bastos, A.; Yue, C.; Ballantyne, A.P.; Broquet, G. Recent Changes in Global Photosynthesis and Terrestrial Ecosystem Respiration Constrained from Multiple Observations. Geophys. Res. Lett. 2018, 45, 1058–1068. [Google Scholar] [CrossRef]
- Myneni, R.B.; Asrar, G.; Gerstl, S.A.W. Radiative transfer in three dimensional leaf canopies. Transp. Theory Stat. Phys. 1990, 19, 205–250. [Google Scholar] [CrossRef]
- Knyazikhin, Y.; Marshak, A.; Myneni, R.B. Three dimensional radiative transfer in vegetation canopies. In Three Dimensional Radiative Transfer in the Cloudy Atmosphere; Marshak, A., Davis, A.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 617–652. ISBN 978-3-540-23958-1. [Google Scholar]
- Lukeš, P.; Stenberg, P.; Rautiainen, M.; Mõttus, M.; Vanhatalo, K.M. Optical properties of leaves and needles for boreal tree species in Europe. Remote Sens. Lett. 2013, 4, 667–676. [Google Scholar] [CrossRef]
- Abakumova, M.; Gorbarenko, E.V.; Nezval, E.I.; Shilovzeva, O.A. Climatological Resources of Solar Energy in Moscow Region; Librocom: Moscow, Russia, 2012; 310p. (In Russian) [Google Scholar]
- Myneni, R.B.; Marshak, A.; Knyazikhin, Y.; Asrar, G. Discrete Ordinates Method for Photon Transport in Leaf Canopies. In Photon Vegetation Interactions. Applications in Optical Remote Sensing and Plant Ecology; Myneni, R., Ross, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1991; pp. 45–106, ISBN-13 978-3-642-75391-6. [Google Scholar]
- Lebedev, V.I. Values of the nodes and weights of ninth to seventeenth order Gauss-Markov quadrature formulae invariant under the octahedron group with inversion. USSR Comput. Math. Math. Phys. 1975, 15, 44–51. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Goncharsky, A.V.; Stepanov, V.V.; Yagola, A.G. Numerical Methods for the Solution of Ill-Posed Problems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1995; p. 253. ISBN 0-7923-3583-X. [Google Scholar]
- Ruimy, A.; Dedieu, G.; Saugier, B. TURC: A diagnostic model of continental gross primary productivity and net primary productivity. Global Biogeochem. Cycles 1996, 10, 269–285. [Google Scholar] [CrossRef]
- Running, S.W.; Nemani, R.R.; Heinsch, F.A.; Zhao, M.; Reeves, M.; Hashimoto, H. A continuous satellite derived measure of global terrestrial primary production. BioScience 2004, 54, 547–560. [Google Scholar] [CrossRef]
- Xiao, X.; Hollinger, D.; Aber, J.; Goltz, M.; Davidson, E.; Zhang, Q.; Moore, B. Satellite-based modeling of gross primary production in an evergreen needleleaf forest. Remote Sens. Environ. 2004, 89, 519–534. [Google Scholar] [CrossRef]
- Ibrom, A.; Oltchev, A.; June, T.; Kreilein, H.; Rakkibu, G.; Ross, T.H.; Panferov, O.; Gravenhorst, G. Variation in photosynthetic light-use efficiency in a mountainous tropical rain forest in Indonesia. Tree Physiol. 2008, 28, 499–508. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pinker, R.T.; Thompson, O.E.; Eck, T.F. The albedo of a tropical evergreen forest. Q. J. R. Meteorol. Soc. 1980, 106, 551–558. [Google Scholar] [CrossRef]
- Giambelluca, T.W.; Hölscher, D.; Bastos, T.X.; Frazão, R.R.; Nullet, M.A.; Ziegler, A.D. Observations of albedo and radiation balance over postforest land surfaces in the eastern Amazon basin. J. Clim. 1997, 10, 919–928. [Google Scholar] [CrossRef]
- Kimes, D.S.; Sellers, P.J.; Newcomb, W.W. Hemispherical reflectance variations of vegetation canopies and implications for global and regional energy budget studies. J. Clim. Appl. Meteorol. 1987, 26, 959–972. [Google Scholar] [CrossRef]
- Grant, I.F.; Prata, A.J.; Cechet, R.P. Diurnal Variation of Albedo on the Remote Sensing of the Daily Mean Albedo of Grassland. J. Clim. Appl. Meteorol. 2000, 39, 231–244. [Google Scholar] [CrossRef]
- Simioni, G.; Durand-Gillmann, M.; Huc, R. Asymmetric competition increases leaf inclination effect on light absorption in mixed canopies. Ann. For. Sci. 2013, 70, 123–131. [Google Scholar] [CrossRef]
- Kranigk, J.; Gruber, F.; Heimann, J.; Thorwest, A. Ein Model für die Kronenraumstruktur und die räumliche Verteilung der Nadeloberflache in einem Fichtenbestand. Allg. For. Jagdztg. 1994, 165, 193–197. [Google Scholar]
- Knyazikhin, Y.; Martonchik, S.W.; Myneni, R.B.; Diner, D.J.; Running, S.W. Synergistic algorithm for estimating vegetation canopy leaf area index and fraction of absorbed photosynthetically active radiation from MODIS and MISR data. J. Geophys. Res. 1998, 103, 32257–32276. [Google Scholar] [CrossRef]
- Kimes, D.S.; Knyazikhin, Y.; Privette, J.L.; Abuelgasim, A.A.; Gao, F. Inversion methods for physically-based models. Remote Sens. Rev. 2000, 18, 381–439. [Google Scholar] [CrossRef]
- Ni, X.; Zhou, Y.; Cao, C.; Wang, X.; Shi, Y.; Park, T.; Choi, S.; Myneni, R.B. Mapping Forest Canopy Height over Continental China Using Multi-Source Remote Sensing Data. Remote Sens. 2015, 7, 8436–8452. [Google Scholar] [CrossRef] [Green Version]
- Schneider, F.D.; Morsdorf, F.; Schmid, B.; Petchey, O.L.; Hueni, A.; Schimel, D.S.; Schaepman, M.E. Mapping functional diversity from remotely sensed morphological and physiological forest traits. Nat. Commun. 2017, 8, 1441. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, X.; Cao, L. Tree-species classification in subtropical forests using airborne hyperspectral and LiDAR data. Remote Sens. 2017, 9, 1180. [Google Scholar] [CrossRef]
- Martin, M.E.; Newman, S.D.; Aber, J.D.; Congalton, R.G. Determining forest species composition using high spectral resolution remote sensing data. Remote Sens. Environ. 1998, 65, 249–254. [Google Scholar] [CrossRef]
- Waser, L.T.; Küchler, M.; Jütte, K.; Stampfer, T. Evaluating the potential of WorldView-2 data to classify tree species and different levels of ash mortality. Remote Sens. 2014, 6, 4515–4545. [Google Scholar] [CrossRef]
- Zhang, Y.; Lukyanenko, D.V.; Yagola, A.G. Using Lagrange principle for solving linear ill-posed problems with a priori information. Numer. Methods Program. 2013, 14, 468–482. (In Russian) [Google Scholar]
- Wang, Y.F.; Zhang, Y.; Lukyanenko, D.V.; Yagola, A.G. Recovering aerosol particle size distribution function on the set of bounded piecewise-convex functions. Inverse Probl. Sci. Eng. 2013, 21, 339–354. [Google Scholar] [CrossRef]
- Zhang, Y.; Lukyanenko, D.V.; Yagola, A.G. An optimal regularization method for convolution equations on the source wise represented set. J. Inverse Ill-Posed Probl. 2015, 23, 465–476. [Google Scholar] [CrossRef]












© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Levashova, N.; Lukyanenko, D.; Mukhartova, Y.; Olchev, A. Application of a Three-Dimensional Radiative Transfer Model to Retrieve the Species Composition of a Mixed Forest Stand from Canopy Reflected Radiation. Remote Sens. 2018, 10, 1661. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10101661
Levashova N, Lukyanenko D, Mukhartova Y, Olchev A. Application of a Three-Dimensional Radiative Transfer Model to Retrieve the Species Composition of a Mixed Forest Stand from Canopy Reflected Radiation. Remote Sensing. 2018; 10(10):1661. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10101661
Chicago/Turabian StyleLevashova, Natalia, Dmitry Lukyanenko, Yulia Mukhartova, and Alexander Olchev. 2018. "Application of a Three-Dimensional Radiative Transfer Model to Retrieve the Species Composition of a Mixed Forest Stand from Canopy Reflected Radiation" Remote Sensing 10, no. 10: 1661. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10101661