Application and Validation of a Model for Terrain Slope Estimation Using Space-Borne LiDAR Waveform Data


Abstract
:1. Introduction
2. Materials
2.1. Study Area
2.2. GLAS Data
2.3. ASTER GDEM Data
2.4. ATM Data
3. Methods
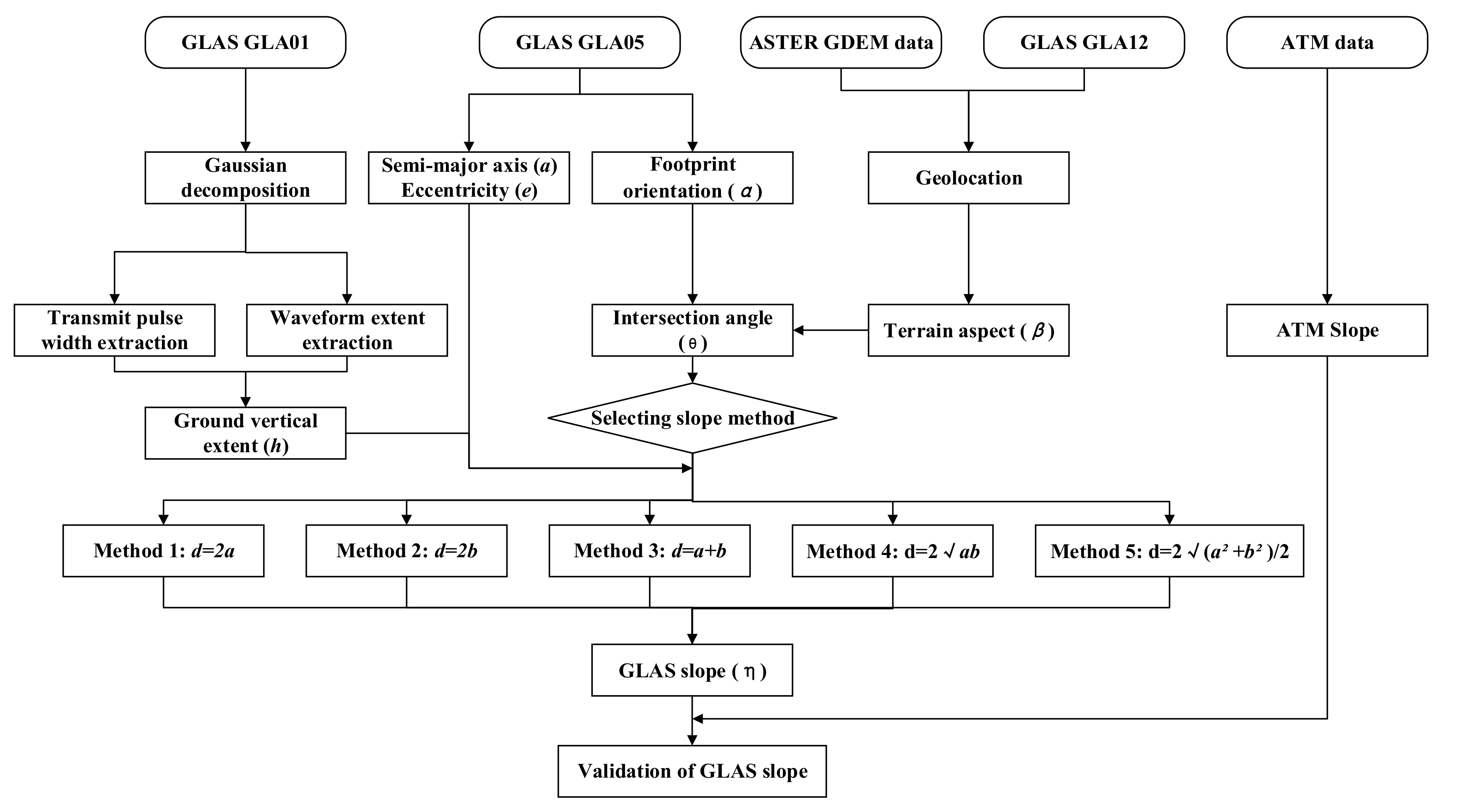
3.1. Terrain Slope Estimation Method
3.1.1. Calculation of Ground Extent
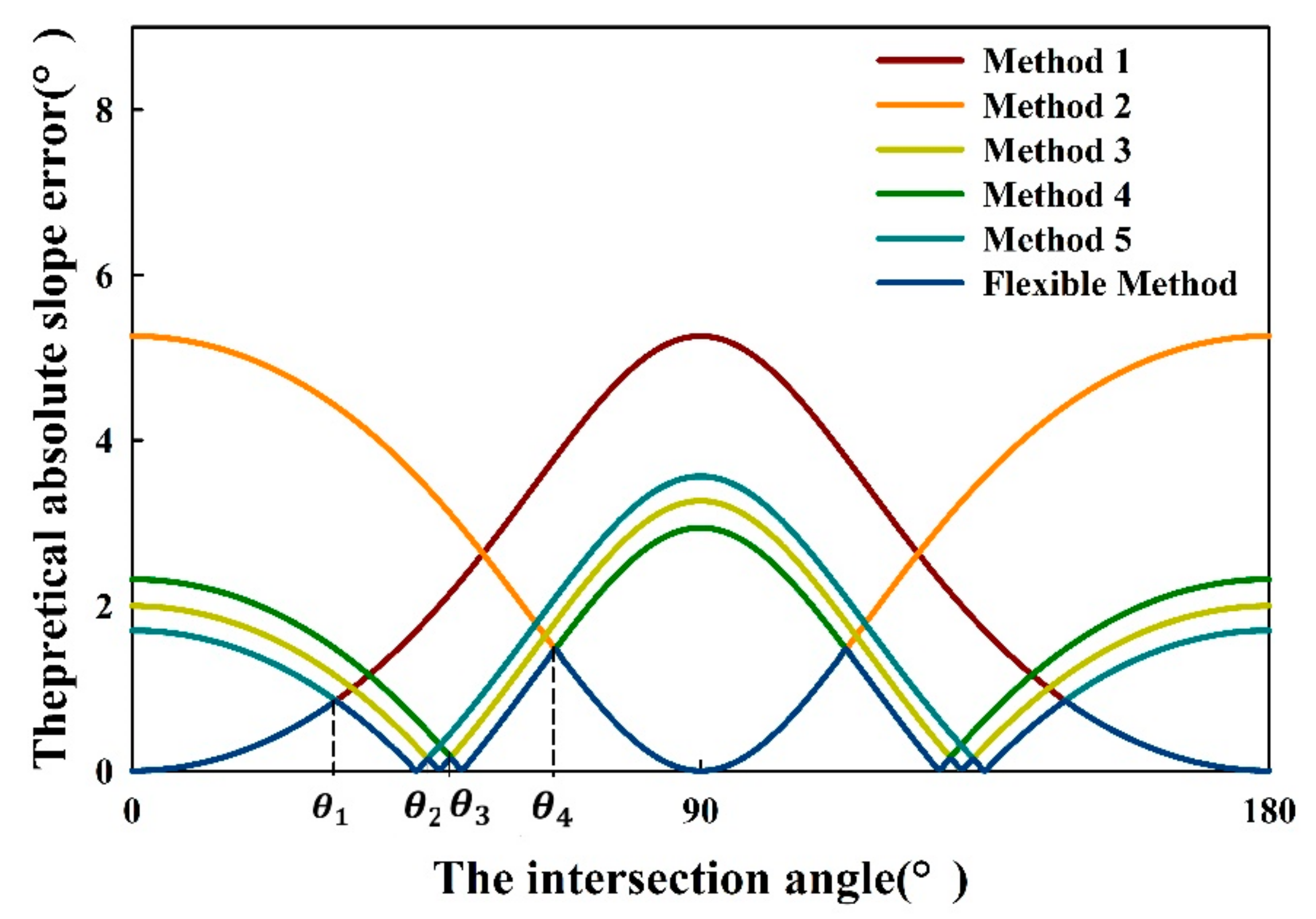
3.1.2. Choice of Footprint Diameter
3.2. Validation and Analysis of the Terrain Slope Derived from GLAS
4. Results and Discussion
4.1. Validation Against Airborne LiDAR Slope
4.2. Slope Estimation of Different Terrain Relief
4.3. Slope Estimation of Different Footprint Eccentricity
4.4. Slope Estimation of Different Footprint Size
4.5. Limitations of the Flexible Method
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arora, V.K. Simulating energy and carbon fluxes over winter wheat using coupled land surface and terrestrial ecosystem models. Agric. For. Meteorol. 2003, 118, 21–47. [Google Scholar] [CrossRef]
- Smith, M.J.; Clark, C.D. Methods for the visualization of digital elevation models for landform mapping. Earth Surf. Process Landf. 2010, 30, 885–900. [Google Scholar] [CrossRef]
- Passalacqua, P.; Belmont, P.; Staley, D.M.; Simley, J.D.; Arrowsmith, J.R.; Bode, C.A.; Crosby, C.; Delong, S.B.; Glenn, N.F.; Kelly, S.A. Analyzing high resolution topography for advancing the understanding of mass and energy transfer through landscapes: A review. Earth Sci. Rev. 2015, 148, 174–193. [Google Scholar] [CrossRef] [Green Version]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Dimri, A.P. Wintertime land surface characteristics in climatic simulations over the western Himalayas. J. Earth Syst. Sci. 2012, 121, 329–344. [Google Scholar] [CrossRef]
- Day, J.J.; Bamber, J.L.; Valdes, P.J. The Greenland Ice Sheet’s surface mass balance in a seasonally sea ice-free Arctic. J. Geophys. Res. Earth Surf. 2013, 118, 1533–1544. [Google Scholar] [CrossRef]
- Johannessen, J.A.; Raj, R.P.; Nilsen, J.E.; Pripp, T.; Knudsen, P.; Counillon, F.; Stammer, D.; Bertino, L.; Andersen, O.B.; Serra, N. Toward Improved Estimation of the Dynamic Topography and Ocean Circulation in the High Latitude and Arctic Ocean: The Importance of GOCE. Surv. Geophys. 2014, 35, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Rennó, C.D.; Nobre, A.D.; Cuartas, L.A.; Soares, J.V.; Hodnett, M.G.; Tomasella, J.; Waterloo, M.J. HAND, a new terrain descriptor using SRTM-DEM: Mapping terra-firme rainforest environments in Amazonia. Remote Sens. Environ. 2008, 112, 3469–3481. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Sequential digital elevation models of active lava flows from ground-based stereo time-lapse imagery. ISPRS J. Photogramm. Remote Sens. 2014, 97, 160–170. [Google Scholar] [CrossRef]
- Shirasawa, M.; Yokoyama, R. Visualizing Topography by Openness: A New Application of Image Processing to Digital Elevation Models. Photogramm. Eng. Remote Sens. 2002, 68, 257–266. [Google Scholar]
- Mercier, J.A.; Schowengerdt, R.A.; Storey, J.C.; Smith, J.L. Geometric Correction and Digital Elevation Extraction Using Multiple MTI Datasets. Photogramm. Eng. Remote Sens. 2004, 73, 133–142. [Google Scholar] [CrossRef]
- Bürgmann, R.; Rosen, P.A.; Fielding, E.J. Synthetic Aperture Radar Interferometry to Measure Earth’s Surface Topography and Its Deformation. Ann. Rev. Earth Planet. Sci. 2000, 28, 169–209. [Google Scholar] [CrossRef]
- Li, Y.; Hong, W.; Pottier, E. Topography Retrieval from Single-Pass POLSAR Data Based on the Polarization-Dependent Intensity Ratio. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3160–3177. [Google Scholar] [CrossRef]
- Arab, M. Quantification of L-band InSAR coherence over volcanic areas using LiDAR and in situ measurements. Remote Sens. Environ. 2014, 152, 202–216. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; rka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Rosette, J.A.B.; North, P.R.J.; Suarez, J.C.; Los, S.O. Uncertainty within satellite LiDAR estimations of vegetation and topography. Int. J. Remote Sens. 2010, 31, 1325–1342. [Google Scholar] [CrossRef]
- Susaki, J. Adaptive Slope Filtering of Airborne LiDAR Data in Urban Areas for Digital Terrain Model (DTM) Generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef] [Green Version]
- Kook, P.J.; Yun, L.S.; Yang, I.T.; Moon, K.D. Monitoring of the Natural Terrain Behavior Using the Terrestrial LiDAR. J. Korean Soc. Civ. Eng. D 2010, 30, 191–198. [Google Scholar]
- Salleh, M.R.M.; Ismail, Z.; Rahman, M.Z.A. Accuracy Assessment of Lidar-Derived Digital Terrain Model (dtm) with Different Slope and Canopy Cover in Tropical Forest Region. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-2/W2, 183–189. [Google Scholar] [CrossRef]
- Alberti, M.; Biscaro, D. Height variation detection in Polar Regions from ICESat satellite altimetry. Comput. Geosci. 2010, 36, 1–9. [Google Scholar] [CrossRef]
- Zwally, H.J.; Schutz, B.; Abdalati, W.; Abshire, J.; Bentley, C.; Brenner, A.; Bufton, J.; Dezio, J.; Hancock, D.; Harding, D. ICESat’s laser measurements of polar ice, atmosphere, ocean, and land. J. Geodyn. 2002, 34, 405–445. [Google Scholar] [CrossRef]
- Brenner, A.C.; Dimarzio, J.P.; Zwally, H.J. Precision and Accuracy of Satellite Radar and Laser Altimeter Data over the Continental Ice Sheets. IEEE Trans. Geosci. Remote. Sens. 2007, 45, 321–331. [Google Scholar] [CrossRef]
- Neuenschwander, A.L.; Urban, T.J.; Gutierrez, R.; Schutz, B.E. Characterization of ICESat/GLAS waveforms over terrestrial ecosystems: Implications for vegetation mapping. J. Geophys. Res. Biogeosci. 2015, 113, 1032–1032. [Google Scholar] [CrossRef]
- Chi, H.; Sun, G.; Huang, J.; Li, R.; Ren, X.; Ni, W.; Fu, A. Estimation of Forest Aboveground Biomass in Changbai Mountain Region Using ICESat/GLAS and Landsat/TM Data. Remote Sens. 2017, 9, 707. [Google Scholar] [CrossRef]
- Xie, H.; Hai, G.; Chen, L.; Liu, S.; Liu, J.; Tong, X.; Li, R. Antarctic Ice Sheet Surface Mass Balance Estimates from 2003 to 2015 Using ICESAT and CRYOSAT-2 Data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 549–553. [Google Scholar] [CrossRef]
- Wang, X.; Holland, D.M.; Gudmundsson, G.H. Accurate coastal DEM generation by merging ASTER GDEM and ICESat/GLAS data over Mertz Glacier, Antarctica. Remote Sens. Environ. 2018, 206, 218–230. [Google Scholar] [CrossRef]
- Hilbert, C.; Schmullius, C. Influence of Surface Topography on ICESat/GLAS Forest Height Estimation and Waveform Shape. Remote Sens. 2012, 4, 2210–2235. [Google Scholar] [CrossRef] [Green Version]
- Park, T.; Kennedy, R.; Choi, S.; Wu, J.; Lefsky, M.; Bi, J.; Mantooth, J.; Myneni, R.; Knyazikhin, Y. Application of Physically-Based Slope Correction for Maximum Forest Canopy Height Estimation Using Waveform Lidar across Different Footprint Sizes and Locations: Tests on LVIS and GLAS. Remote Sens. 2014, 6, 6566–6586. [Google Scholar] [CrossRef] [Green Version]
- Nie, S.; Wang, C.; Zeng, H.; Xi, X.; Xia, S. A revised terrain correction method for forest canopy height estimation using ICESat/GLAS data. ISPRS J. Photogramm. Remote Sens. 2015, 108, 183–190. [Google Scholar] [CrossRef]
- Li, X.; Xu, L.; Tian, X.; Kong, D. Terrain slope estimation within footprint from ICESat/GLAS waveform: Model and method. J. Appl. Remote Sens. 2012, 6, 063534. [Google Scholar]
- Mahoney, C.; Kljun, N.; Los, S.; Chasmer, L.; Hacker, J.; Hopkinson, C.; North, P.; Rosette, J.; Van Gorsel, E. Slope Estimation from ICESat/GLAS. Remote Sens. 2014, 6, 10051–10069. [Google Scholar] [CrossRef] [Green Version]
- Nie, S.; Wang, C.; Xi, X.; Li, G.; Luo, S.; Yang, X.; Wang, P.; Zhu, X. Exploring the Influence of Various Factors on Slope Estimation Using Large-Footprint LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Nie, S.; Wang, C.; Dong, P.; Li, G.; Xi, X.; Wang, P.; Yang, X. A Novel Model for Terrain Slope Estimation Using ICESat/GLAS Waveform Data. IEEE Trans. Geosci. Remote Sens. 2017, 56, 217–227. [Google Scholar]
- Hui, Z.; Song, L.; Chi, Y. The Influence of Elliptical Gaussian Laser Beam on Inversion of Terrain Information for Satellite Laser Altimeter. Photogramm. Eng. Remote Sens. 2016, 82, 767–773. [Google Scholar] [CrossRef]
- Pang, Y.; Lefsky, M.; Sun, G.; Ranson, J. Impact of footprint diameter and off-nadir pointing on the precision of canopy height estimates from spaceborne lidar. Remote Sens. Environ. 2011, 115, 2798–2809. [Google Scholar] [CrossRef]
- Ni-Meister, W.; Jupp, D.L.B.; Dubayah, R. Modeling lidar waveforms in heterogeneous and discrete canopies. IEEE Trans. Geosci. Remote Sens. 2002, 39, 1943–1958. [Google Scholar] [CrossRef]
- Magruder, L.A.; Webb, C.E.; Urban, T.J.; Silverberg, E.C.; Schutz, B.E. ICESat Altimetry Data Product Verification at White Sands Space Harbor. IEEE Trans. Geosci. Remote Sens. 2006, 45, 147–155. [Google Scholar] [CrossRef]
- Marquis, M.; Barbieri, K.; Brenner, A.; Hancock, D.; Haran, T.; Palm, S.; Troisi, V.; Wolfe, J.; Zwally, H.J. Geoscience Laser Altimeter System (GLAS) Data Products from the Ice, Cloud, and land Elevation Satellite (ICESat) Mission. J. Obstet. Gynaecol. Res. 2001, 40, 1420–1422. [Google Scholar]
- Stevens, N.F.; Garbeil, H.; Mouginis-Mark, P.J. NASA EOS Terra ASTER: Volcanic topographic mapping and capability. Remote Sens. Environ. 2004, 90, 405–414. [Google Scholar] [CrossRef]
- Cuartero, A.; Felicísimo, A.M.; Ariza, F.J. Accuracy of DEM Generation from Terra-Aster Stereo Data. Int. Arch. Photogramm. Remote Sens. 2004, 35, 559–563. [Google Scholar]
- Fujisada, H.; Bailey, G.B.; Kelly, G.G.; Hara, S.; Abrams, M.J. ASTER DEM performance. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2707–2714. [Google Scholar] [CrossRef]
- Tachikawa, T.; Hato, M.; Kaku, M.; Iwasaki, A. Characteristics of ASTER GDEM version 2. Geosci. Remote Sens Symp. 2011, 3657–3660. [Google Scholar] [CrossRef]
- Athmania, D.; Achour, H. External Validation of the ASTER GDEM2, GMTED2010 and CGIAR-CSI- SRTM v4.1 Free Access Digital Elevation Models (DEMs) in Tunisia and Algeria. Remote Sens. 2014, 6, 4600–4620. [Google Scholar] [CrossRef] [Green Version]
- Meyer, D.J.; Tachikawa, T.; Abrams, M.; Crippen, R.; Krieger, T.; Gesch, D.; Carabajal, C. Summary of the Validation of the Second Version of the Aster GDEM. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, B4, 291–293. [Google Scholar] [CrossRef]
- Rexer, M.; Hirt, C. Comparison of free high resolution digital elevation data sets (ASTER GDEM2, SRTM v2.1/v4.1) and validation against accurate heights from the Australian National Gravity Database. J. Geol. Soc. Aust. 2014, 61, 213–226. [Google Scholar] [CrossRef]
- Studinger, M. NASA’s Operation IceBridge: Using Instrumented Aircraft to Bridge the Observational Gap between ICESat and ICESat-2 Laser Altimeter Measurements. IEEE Int. Geosci. Remote Sens. Symp. 2010. [Google Scholar] [CrossRef]
- Wang, X.; Holland, D.M. A Method to Calculate Elevation-Change Rate of Jakobshavn Isbrae Using Operation IceBridge Airborne Topographic Mapper Data. IEEE Geosci. Remote Sens. Lett. 2218, 15, 1–5. [Google Scholar] [CrossRef]
- Yi, D.; Harbeck, J.P.; Manizade, S.S.; Kurtz, N.T.; Studinger, M.; Hofton, M. Arctic Sea Ice Freeboard Retrieval with Waveform Characteristics for NASA’s Airborne Topographic Mapper (ATM) and Land, Vegetation, and Ice Sensor (LVIS). IEEE Trans. Geosci. Remote Sens. 2014, 53, 1403–1410. [Google Scholar] [CrossRef]
- Brugler, E. Arctic Sea Ice: Using Airborne Topographic Mapper Measurements (ATM) to Determine Sea Ice Thickness. 2011. Available online: www.star.nesdis.noaa.gov (accessed on 18 October 2018).
- Hmida, S.B.; Kallel, A.; Gastellu-Etchegorry, J.P.; Roujean, J.L. Crop Biophysical Properties Estimation Based on LiDAR Full-Waveform Inversion Using the DART RTM. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4853–4868. [Google Scholar] [CrossRef]
- Lee, S.; Ni-Meister, W.; Yang, W.; Chen, Q. Physically based vertical vegetation structure retrieval from ICESat data: Validation using LVIS in White Mountain National Forest, New Hampshire, USA. Remote Sens. Environ. 2011, 115, 2776–2785. [Google Scholar] [CrossRef]
- Yang, W.; Ni-Meister, W.; Lee, S. Assessment of the impacts of surface topography, off-nadir pointing and vegetation structure on vegetation LIDAR waveforms using an extended geometric optical and radiative transfer model. Remote Sens. Environ. 2011, 115, 2810–2822. [Google Scholar] [CrossRef]
- Hofton, M.A.; Minster, J.B.; Blair, J.B. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens. 1999, 38, 1989–1996. [Google Scholar] [CrossRef]
- Wang, C.; Tang, F.; Li, L.; Li, G.; Feng, C.; Xi, X. Wavelet Analysis for ICESat/GLAS Waveform Decomposition and Its Application in Average Tree Height Estimation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 115–119. [Google Scholar] [CrossRef]
- Chen, Q. Assessment of terrain elevation derived from satellite laser altimetry over mountainous forest areas using airborne lidar data. ISPRS J. Photogramm. Remote Sens. 2010, 65, 111–122. [Google Scholar] [CrossRef]
- Harding, D.J.; Carabajal, C.C. ICESat waveform measurements of within-footprint topographic relief and vegetation vertical structure. Geophys. Res. Lett. 2005, 32, 741–746. [Google Scholar] [CrossRef]
- Hubacek, M.; Kovarik, V.; Kratochvil, V. Analysis of Influence of Terrain Relief Roughness on DEM Accuracy Generated from LIDAR in the Czech Republic Territory. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 25–30. [Google Scholar] [CrossRef]
- Höfle, B.; Hollaus, M. Roughness Parameterization Using Full-Waveform Airborne LiDAR Data. In Proceedings of the EGU General Assemble Conference, Vienna, Austria, 2–7 May 2010. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Latitude | Longitude | Elevation | Terrain | Location | ||
|---|---|---|---|---|---|---|---|
| 1 | 69.2°N–76.7°N | 46.4°W–63.3°W | 611~2023 m | 0~24° | 4 | Moderate relief | Greenland |
| 2 | 65.8°N–69.3°N | 32.1°W–50.9°W | 28~3192 m | 0~57° | 11 | High relief | Greenland |
| 3 | 66.8°S–73.0°S | 61.8°W–68.8°W | 0~2058 m | 0~13° | 2 | Low relief | Antarctica |
| 4 | 67.8°S–71.0°S | 65.8°W–75.6°W | 0~2033 m | 0~32° | 6 | Moderate relief | Antarctica |
| GLA01 Code | Description |
|---|---|
| i_rec_ndx | GLAS record index |
| i_tx_wf | Sampled transmit pulse waveform |
| i_rng_wf | Sampled received pulse waveform |
| i_4nsBgMean | Background mean value |
| i_4nsBgSDEV | Background standard deviation |
| GLA05 Code | |
| i_tpazimuth | Transmit pulse azimuth |
| i_tpeccentricity | Transmit pulse eccentricity |
| i_tpmajoraxis | Transmit pulse major axis |
| GLA12 Code | |
| i_lat | Coordinate data, latitude |
| i_lon | Coordinate data, longitude |
| i_elev | Ice sheet surface elevation |
| Site | Number of Estimates | ATM Acquisition Date | GLAS Acquisition Date | ASTER GDEM Acquisition Date |
|---|---|---|---|---|
| Site 1 | 188 | 14 September 2007 | October 2007 | October 2007 |
| Site 2 | 304 | 23 September 2007 | October 2007 | October 2007 |
| Site 3 | 227 | 14 October 2008 | October 2008 | October 2008 |
| Site 4 | 139 | 30 October 2008 | October 2008 | October 2008 |
| Method | Number of Estimates | Estimated Bias (°) | Estimated Standard Deviation (°) | RMSE (°) | R2 |
|---|---|---|---|---|---|
| Method 1 | 858 | −0.556 | 4.142 | 4.147 | 0.760 |
| Method 2 | 858 | 0.473 | 4.165 | 4.170 | 0.757 |
| Method 3 | 858 | −0.101 | 4.023 | 4.027 | 0.770 |
| Method 4 | 858 | −0.098 | 4.026 | 4.031 | 0.770 |
| Method 5 | 858 | −0.114 | 4.020 | 4.025 | 0.771 |
| Flexible Method | 858 | −0.064 | 3.592 | 3.596 | 0.829 |
| Method | Number of Estimates (Slope > 5°) | Estimated Bias (°) | Estimated Standard Deviation (°) | RMSE (°) | R2 |
| Method 1 | 218 | −3.117 | 6.825 | 6.856 | 0.664 |
| Method 2 | 218 | −0.704 | 6.874 | 6.906 | 0.662 |
| Method 3 | 218 | −1.999 | 6.490 | 6.521 | 0.680 |
| Method 4 | 218 | −1.915 | 6.498 | 6.529 | 0.680 |
| Method 5 | 218 | −2.081 | 6.483 | 6.515 | 0.681 |
| Flexible Method | 218 | −1.834 | 5.153 | 5.180 | 0.757 |
| Method | Number of Estimates (Slope ≤ 5°) | Estimated Bias (°) | Estimated Standard Deviation (°) | RMSE (°) | R2 |
| Method 1 | 640 | 0.316 | 1.017 | 1.025 | 0.595 |
| Method 2 | 640 | 0.840 | 1.018 | 1.026 | 0.591 |
| Method 3 | 640 | 0.545 | 1.017 | 1.024 | 0.594 |
| Method 4 | 640 | 0.561 | 1.017 | 1.024 | 0.594 |
| Method 5 | 640 | 0.530 | 1.017 | 1.024 | 0.594 |
| Flexible Method | 640 | 0.458 | 0.904 | 0.936 | 0.636 |
| Method | Number of Estimates (e > 0.6) | Estimates Bias (°) | Estimates Standard Deviation (°) | RMSE (°) | R2 |
| Method 1 | 313 | −1.012 | 4.488 | 4.502 | 0.748 |
| Method 2 | 313 | 0.653 | 4.517 | 4.532 | 0.745 |
| Method 3 | 313 | −0.298 | 4.193 | 4.208 | 0.764 |
| Method 4 | 313 | −0.295 | 4.196 | 4.211 | 0.763 |
| Method 5 | 313 | −0.363 | 4.191 | 4.205 | 0.764 |
| Flexible Method | 313 | −0.230 | 3.409 | 3.421 | 0.838 |
| Method | Number of Estimates (e ≤ 0.6) | Estimates Bias (°) | Estimates Standard Deviation (°) | RMSE (°) | R2 |
| Method 1 | 545 | −0.373 | 3.927 | 3.963 | 0.773 |
| Method 2 | 545 | 0.289 | 3.913 | 3.921 | 0.777 |
| Method 3 | 545 | −0.066 | 3.931 | 3.938 | 0.775 |
| Method 4 | 545 | −0.053 | 3.919 | 3.927 | 0.776 |
| Method 5 | 545 | −0.078 | 3.920 | 3.929 | 0.776 |
| Flexible Method | 545 | −0.041 | 3.589 | 3.596 | 0.813 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Wang, C.; Nie, S.; Xi, X.; Hu, Z.; Qin, H. Application and Validation of a Model for Terrain Slope Estimation Using Space-Borne LiDAR Waveform Data. Remote Sens. 2018, 10, 1691. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10111691
Yang X, Wang C, Nie S, Xi X, Hu Z, Qin H. Application and Validation of a Model for Terrain Slope Estimation Using Space-Borne LiDAR Waveform Data. Remote Sensing. 2018; 10(11):1691. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10111691
Chicago/Turabian StyleYang, Xuebo, Cheng Wang, Sheng Nie, Xiaohuan Xi, Zhenyue Hu, and Haiming Qin. 2018. "Application and Validation of a Model for Terrain Slope Estimation Using Space-Borne LiDAR Waveform Data" Remote Sensing 10, no. 11: 1691. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10111691