Evolution of the Performances of Radar Altimetry Missions from ERS-2 to Sentinel-3A over the Inner Niger Delta

 , , , ,
, , , ,
Abstract
:
1. Introduction
2. Method
2.1. Principle of Radar Altimetry and Data Processing
2.1.1. Principle of Altimetry Measurement
2.1.2. Time Variations of River Levels from Radar Altimetry Measurements
2.2. Validation of the Altimetry-Based Water Levels
3. Study Area and Datasets
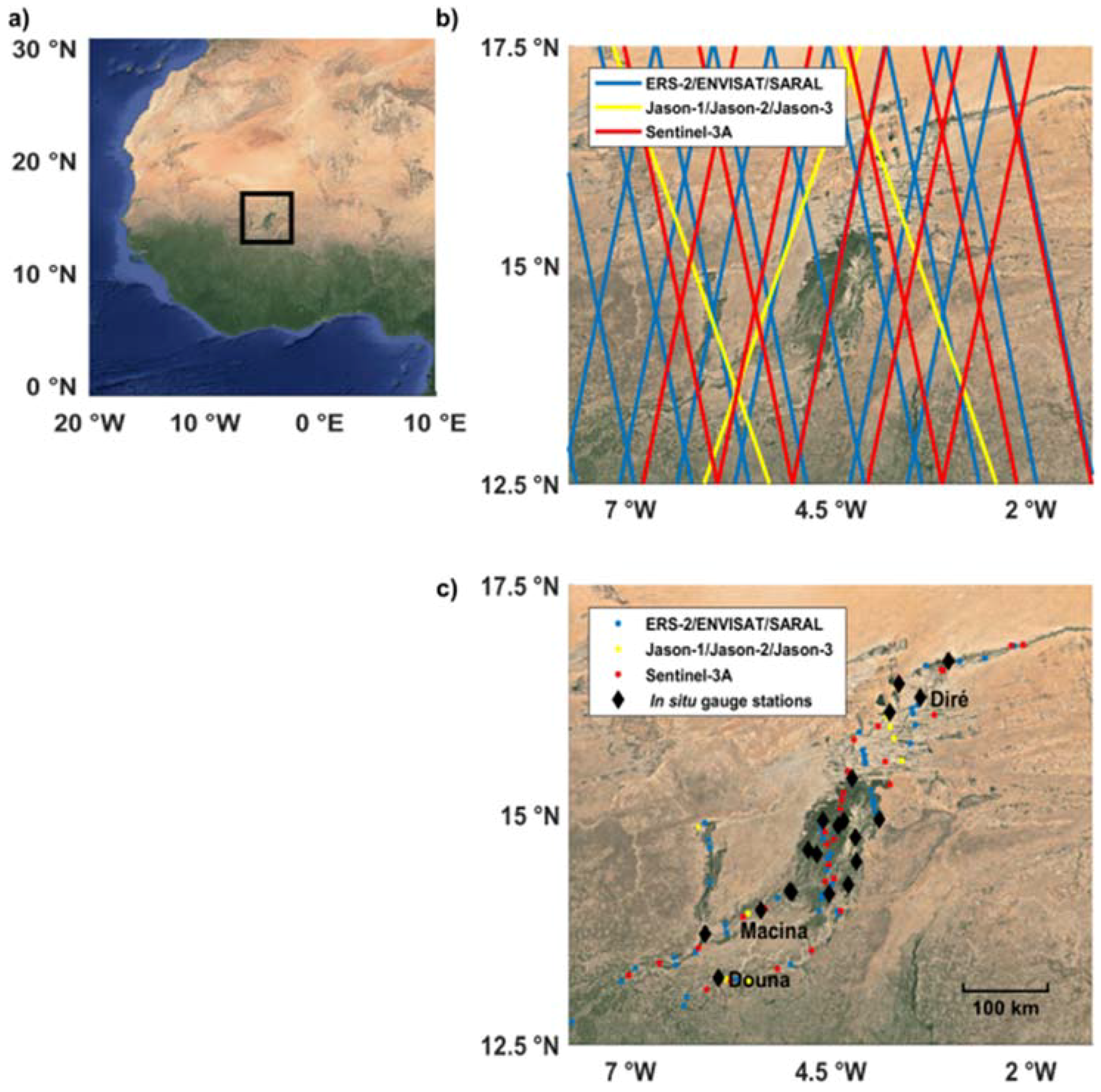
3.1. Study Area
3.2.1. Missions with a 35-Day Repeat Period (European Remote-Sensing Satellite-2 (ERS-2), ENVIronment SATellite (ENVISAT), Satellite with Argos and ALtika (SARAL))
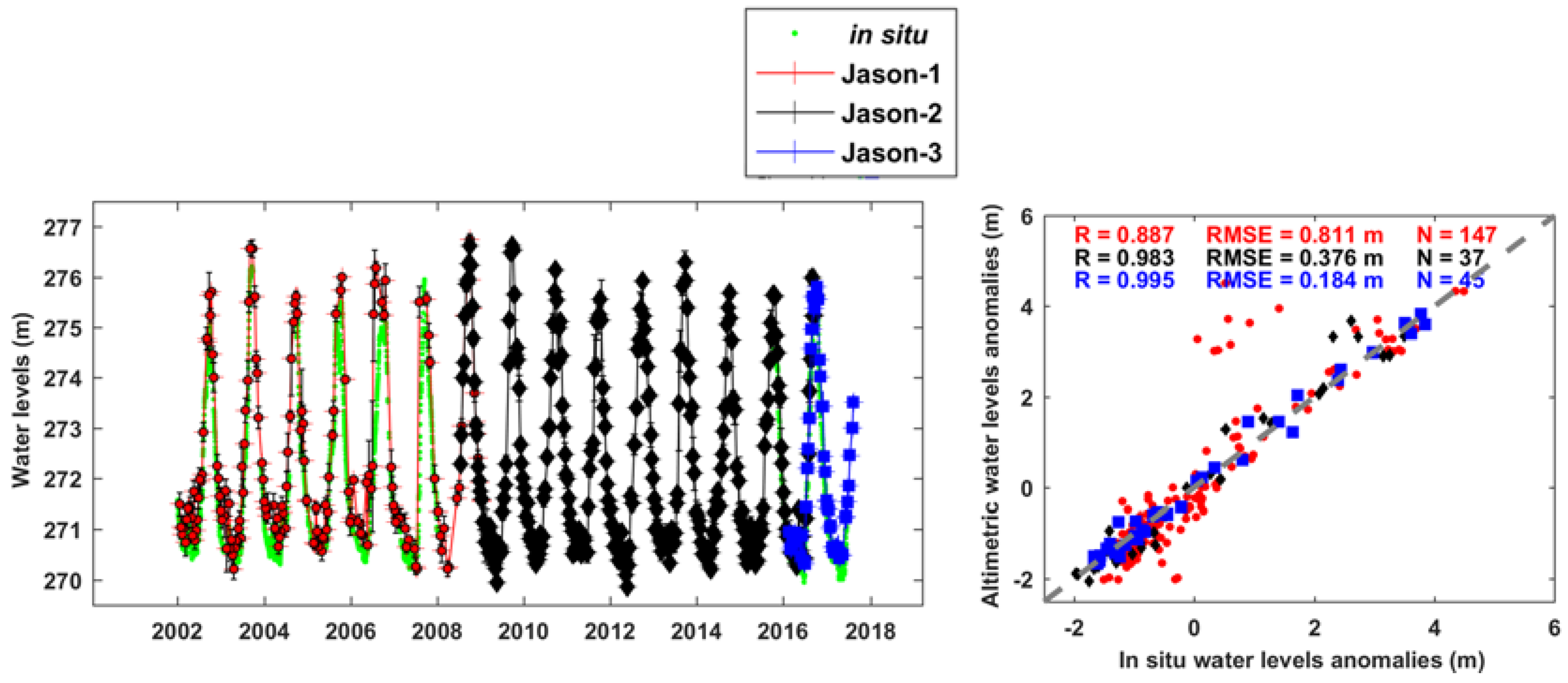
3.2.2. Missions with a 10-Day Repeat Period (Jason-1, Jason-2 and Jason-3)
2.2.3. Mission with a 27-Day Repeat Period (Sentinel-3A)
3.3. In Situ Water Levels
4. Results
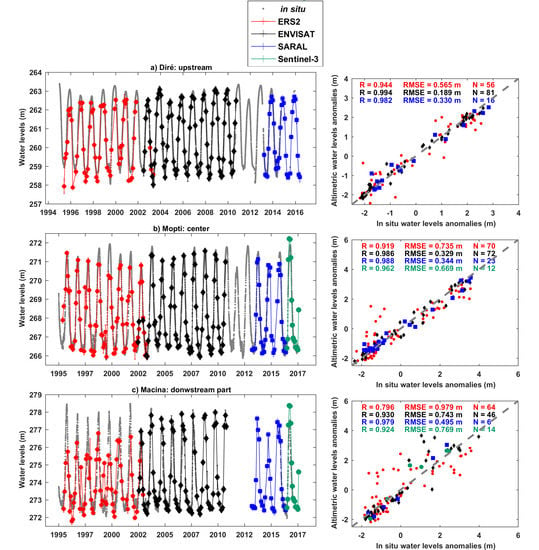
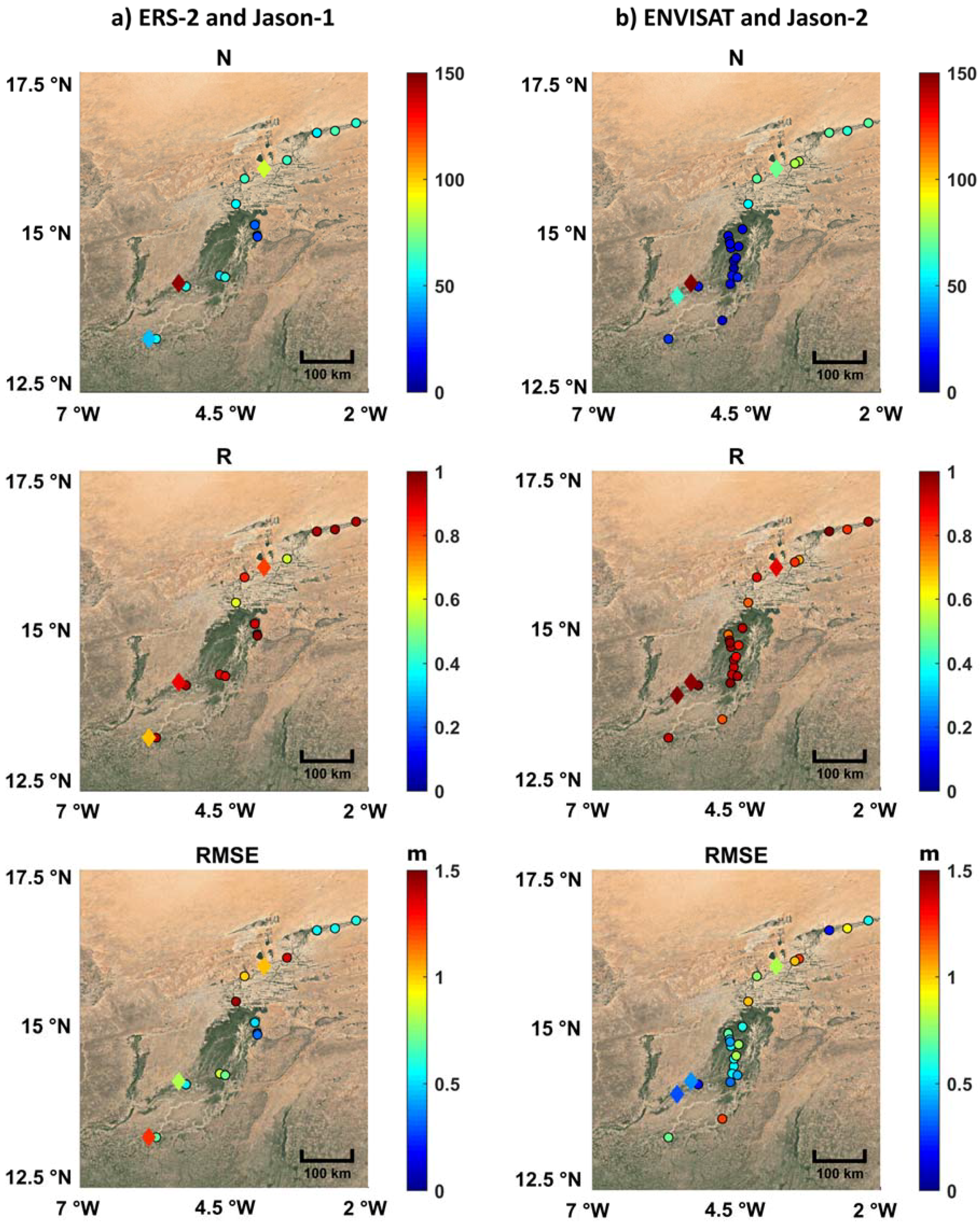
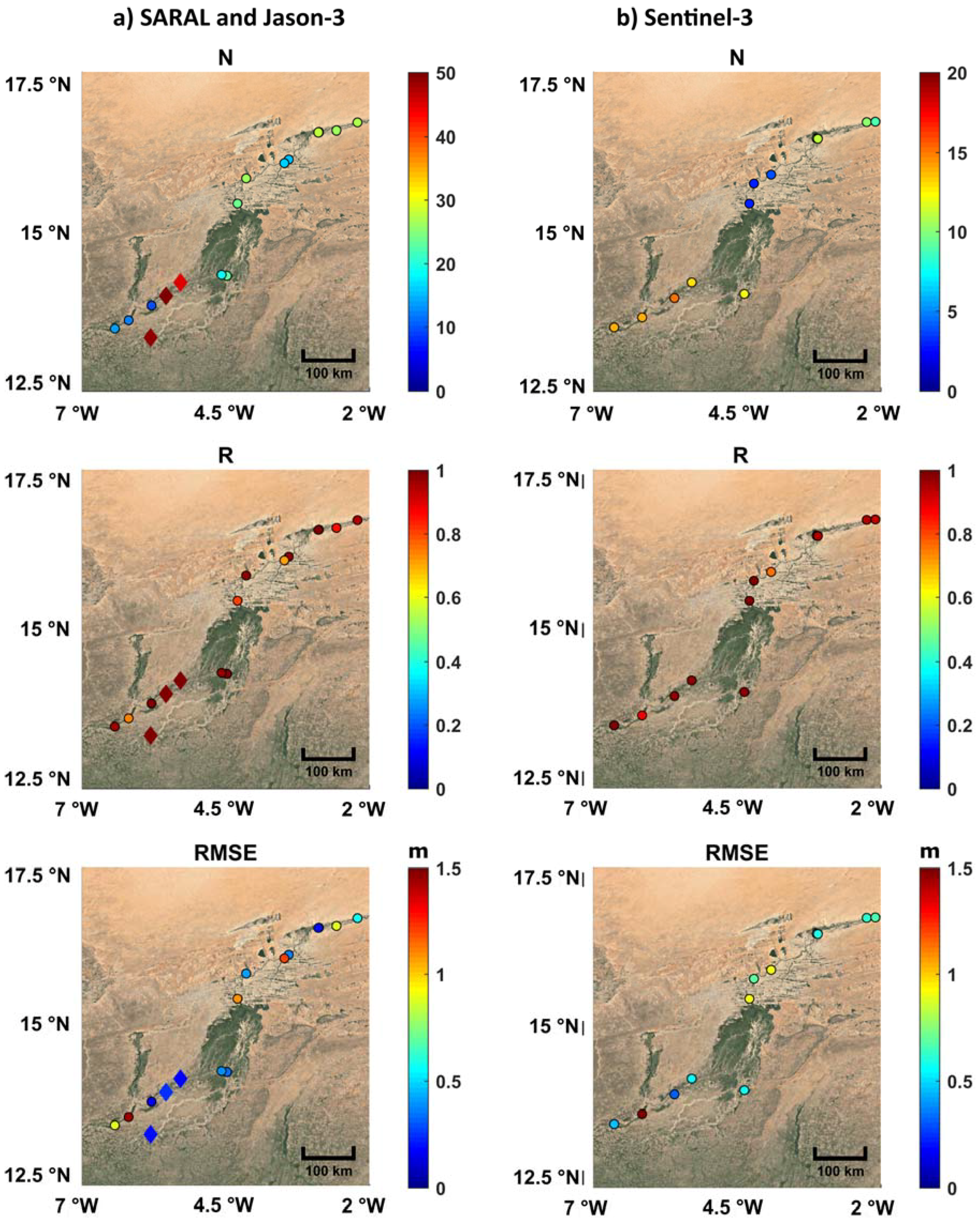
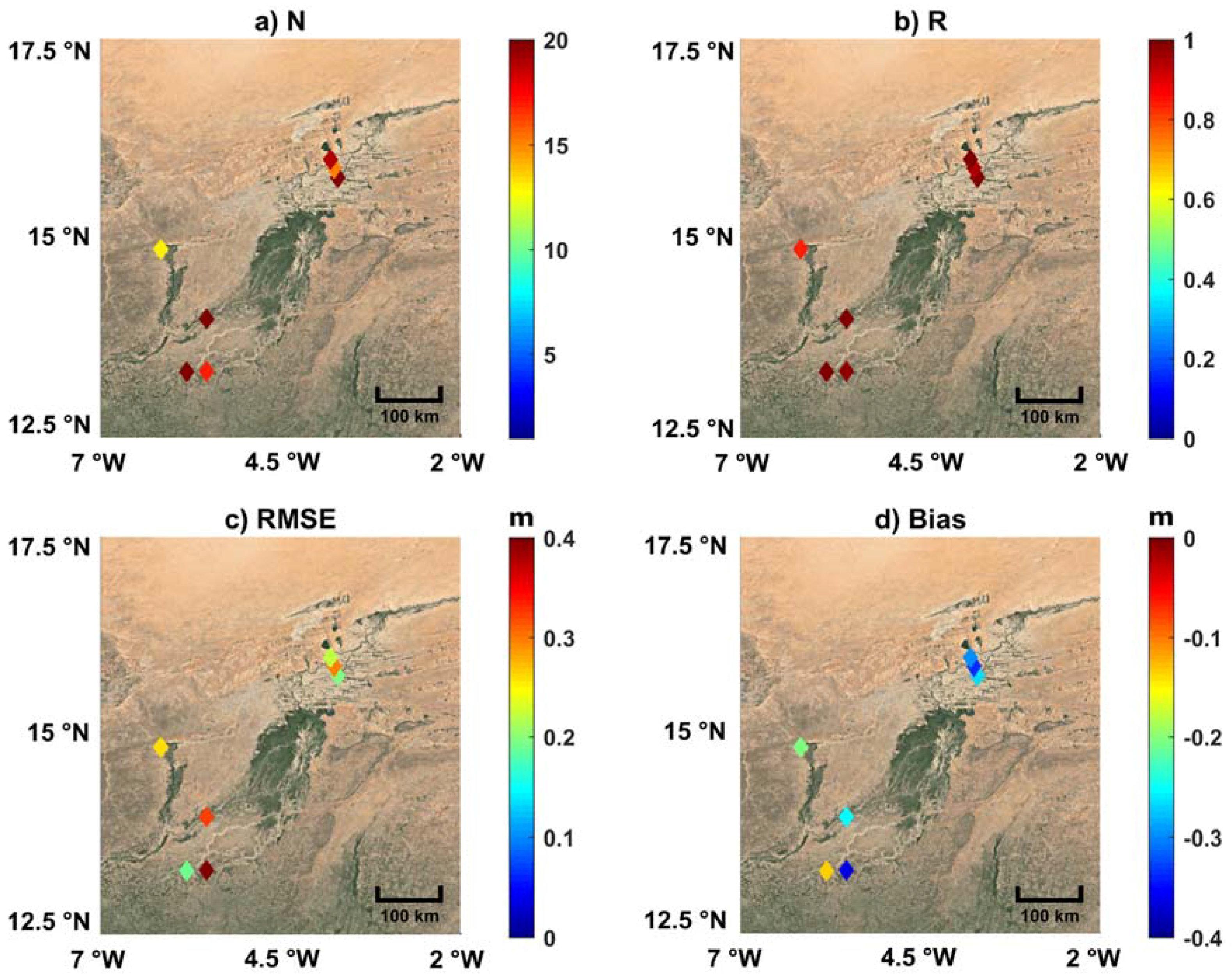
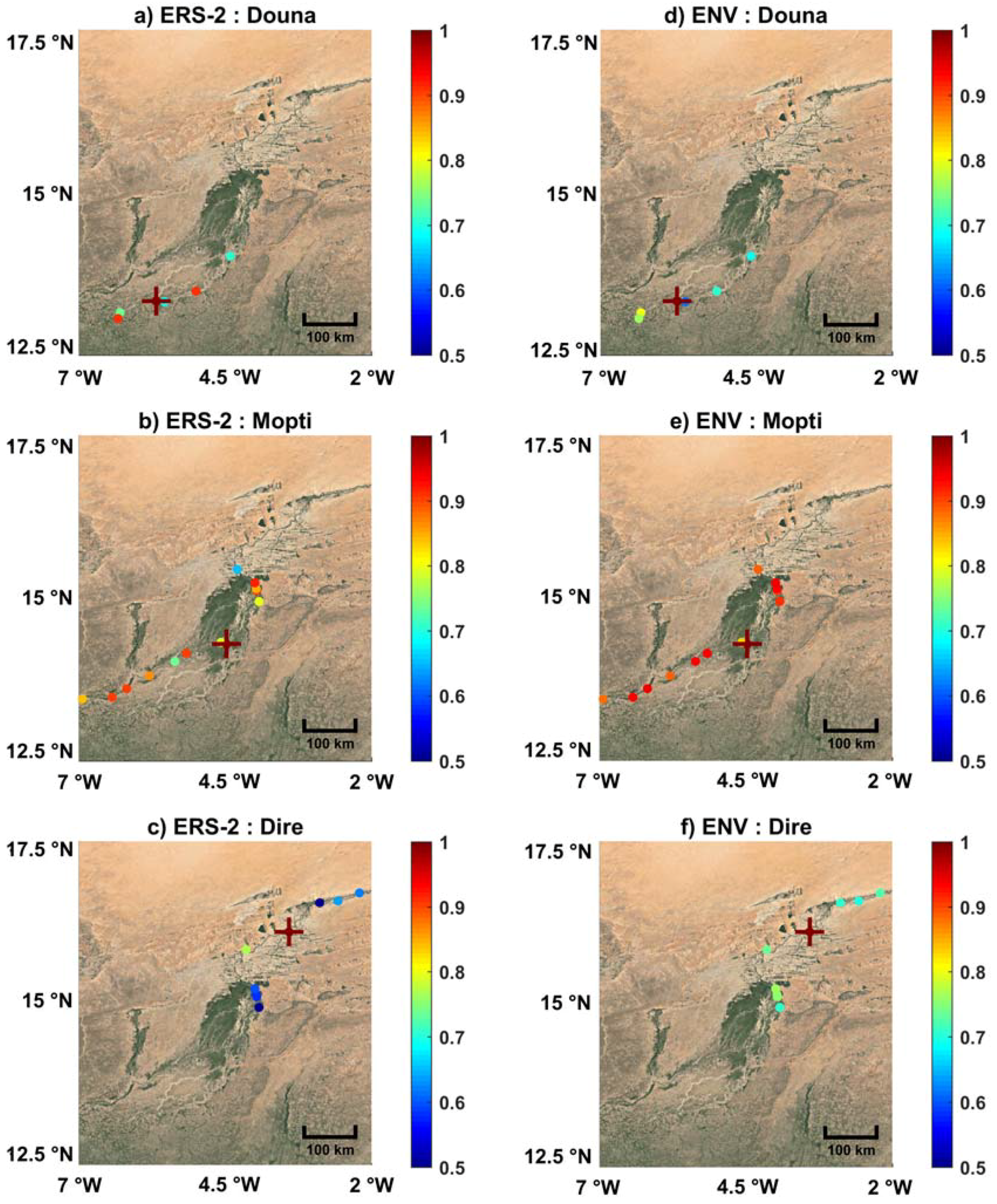
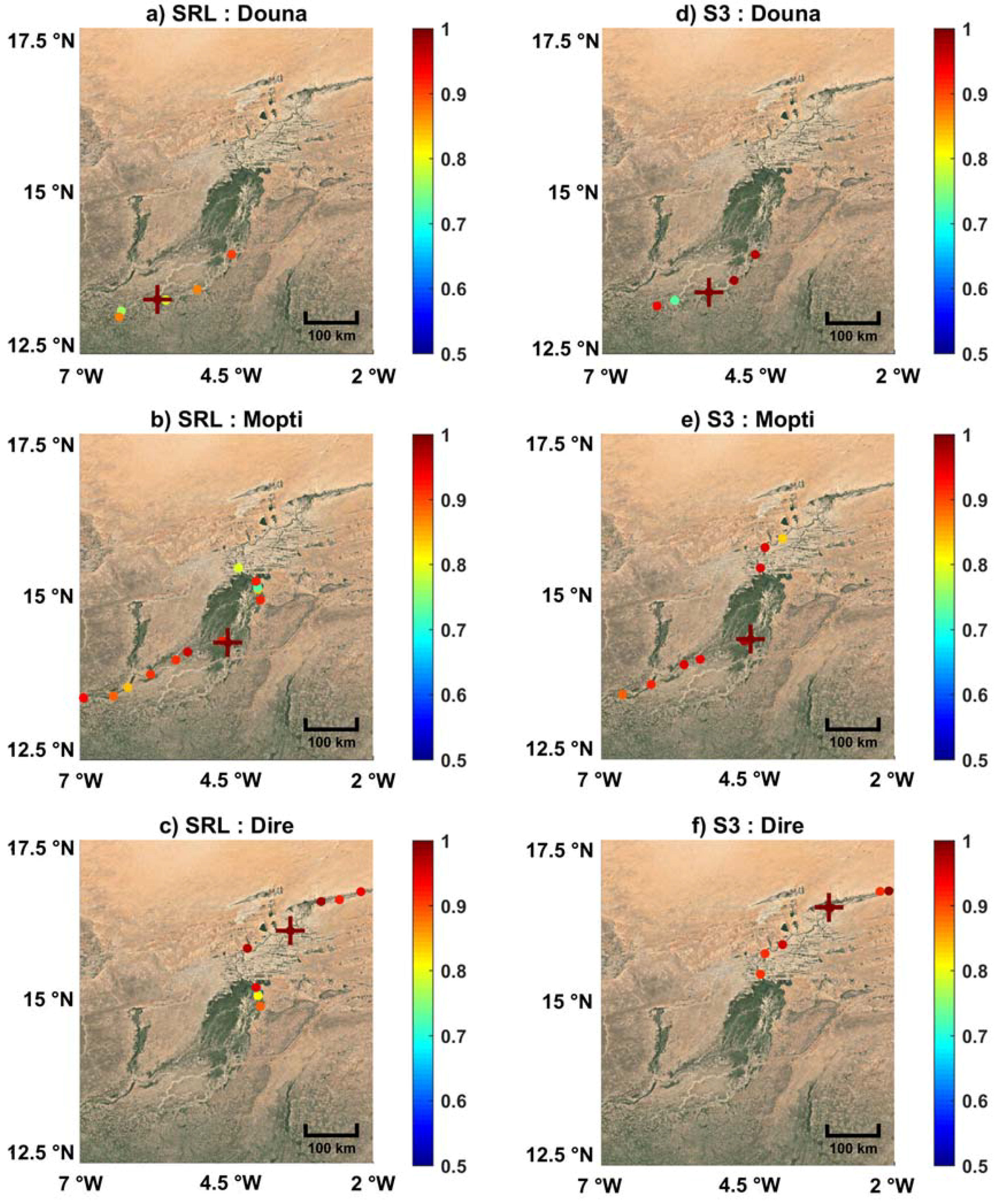
4.1. Direct Validation of the Altimetry-Based Water Stages
- 19 against ERS-2-based water stages;
- 32 against ENVISAT-based water stages;
- 14 against SARAL-based water stages;
- 3 against Jason-1 and Jason-2-based water stages;
- 2 against Jason-3-based water stages;
- 16 against Sentinel-3A-based water stages.
- between 28 and 70 for the 19 ERS-2-based time series of water level (out of 85 available cycles);
- between 7 and 81 for 32 ENVISAT-based time series of water level (out of 89 available cycles);
- between 6 and 28 for the 14 SARAL-based time series of water level (out of 35 available cycles);
- between 46 and 147 for the 3 Jason-1-based time series of water level (out of 262 available cycles);
- between 37 and 72 for the 3 Jason-2-based time series of water level (out of 303 available cycles);
- between 45 and 50 for the 2 Jason-3-based time series of water level (out of 55 available cycles);
- between 3 and 15 for the 16 Sentinel-3A-based time series of water level (out of 16 available cycles).
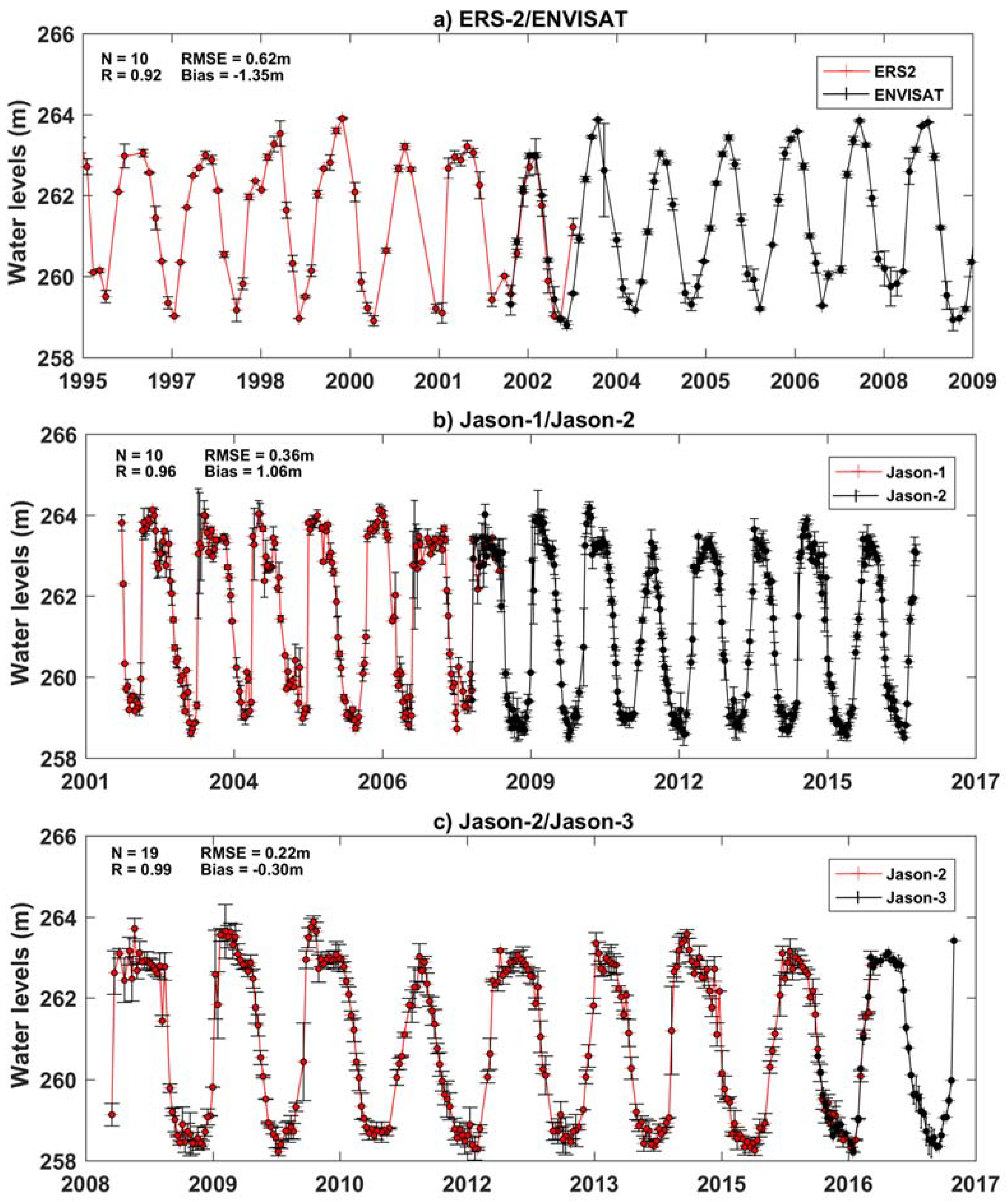
- using the acquisitions made during tandem phases when two missions were in the same orbit a few seconds or minutes apart from each other (e.g., Jason-1 and Jason-2, Jason-2 and Jason-3, ERS-2 and ENVISAT);
- averaging the acquisitions made during the common period of observations at low water stages (April–May–June) for Sentinel-3A and SARAL;
- averaging the acquisitions made during low water periods (April–May–June) on different years for ENVISAT (2003–2010) and SARAL (2013–2016).
4.2. Intermission Water Stage Comparison
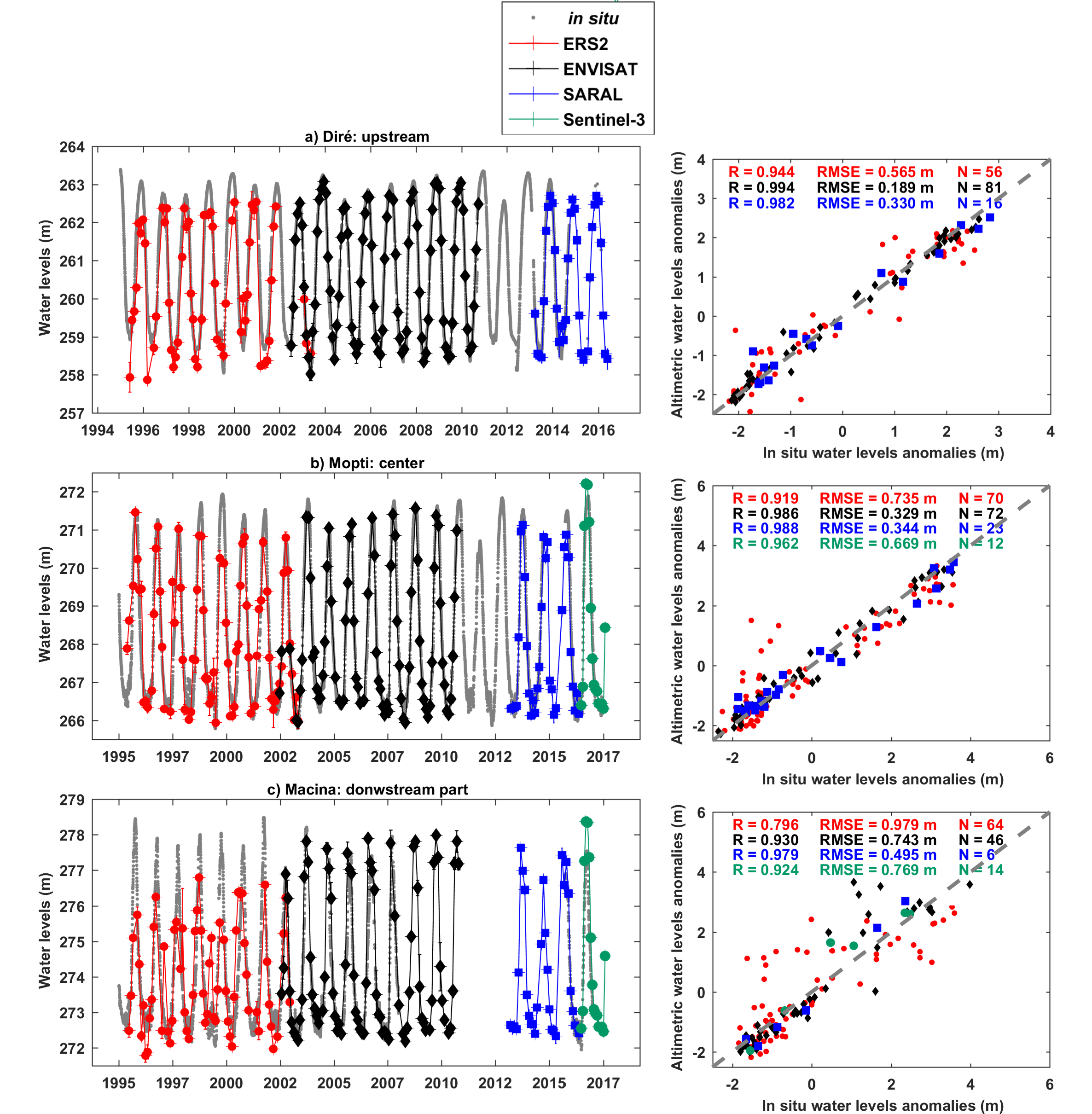
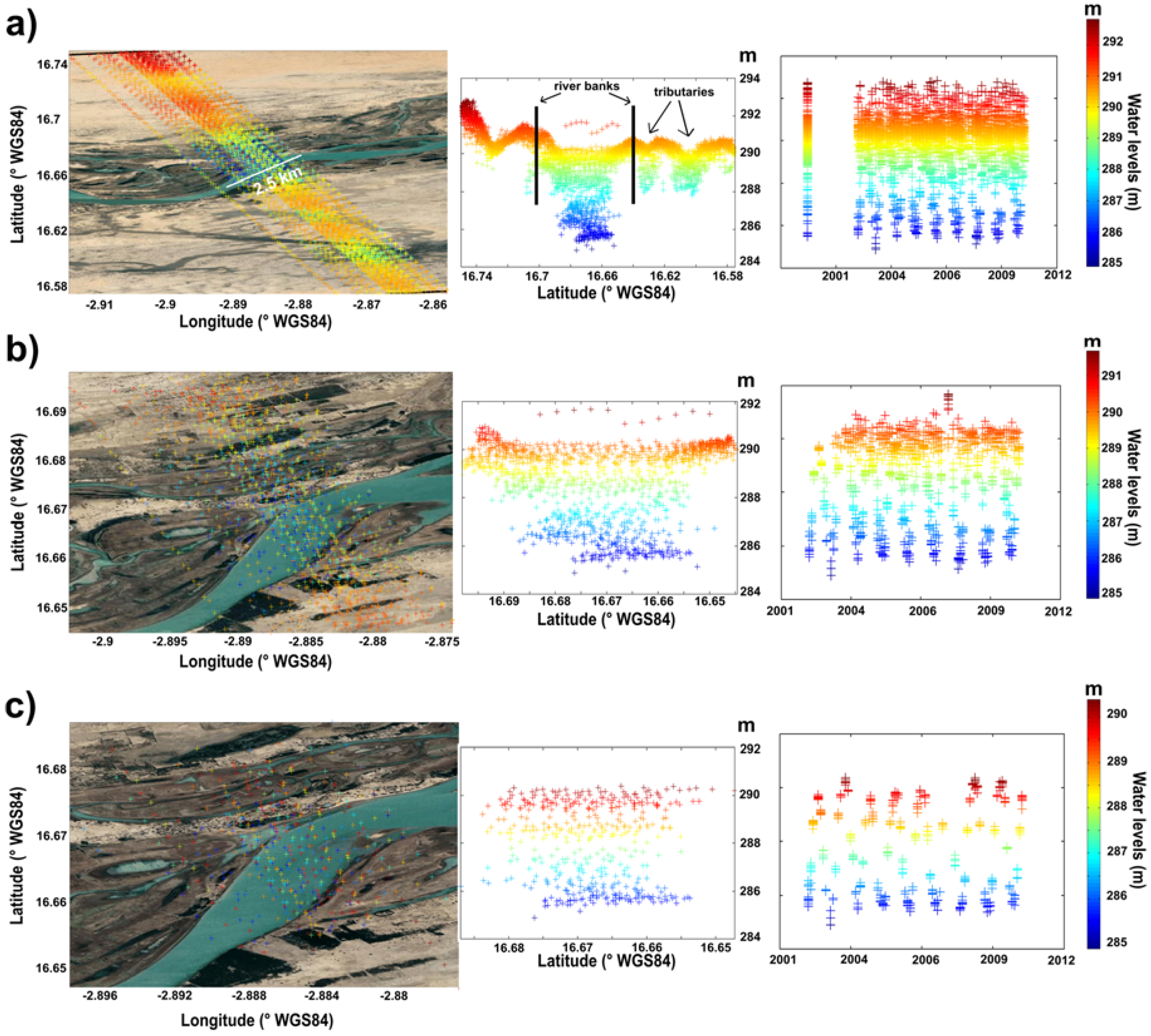
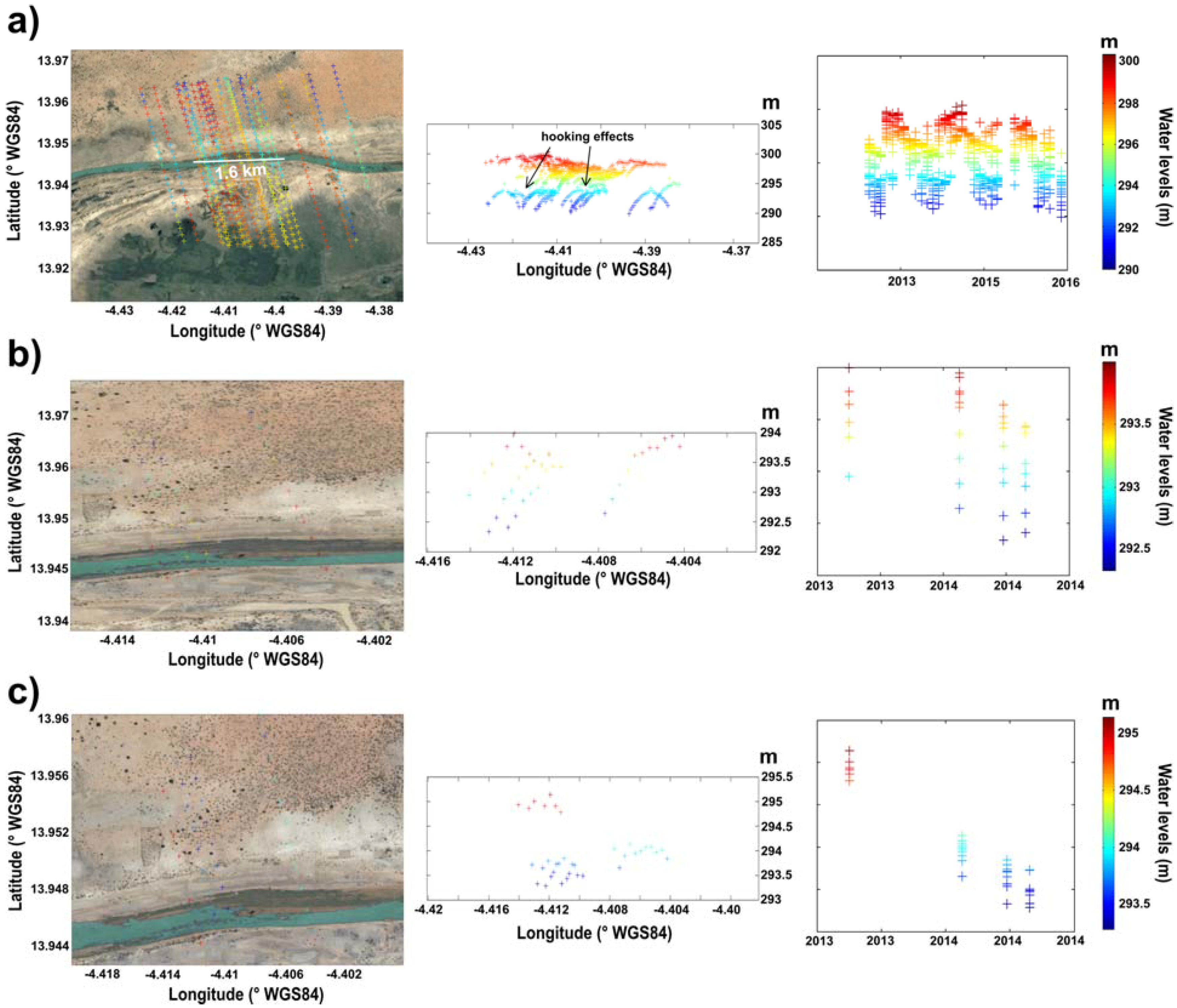
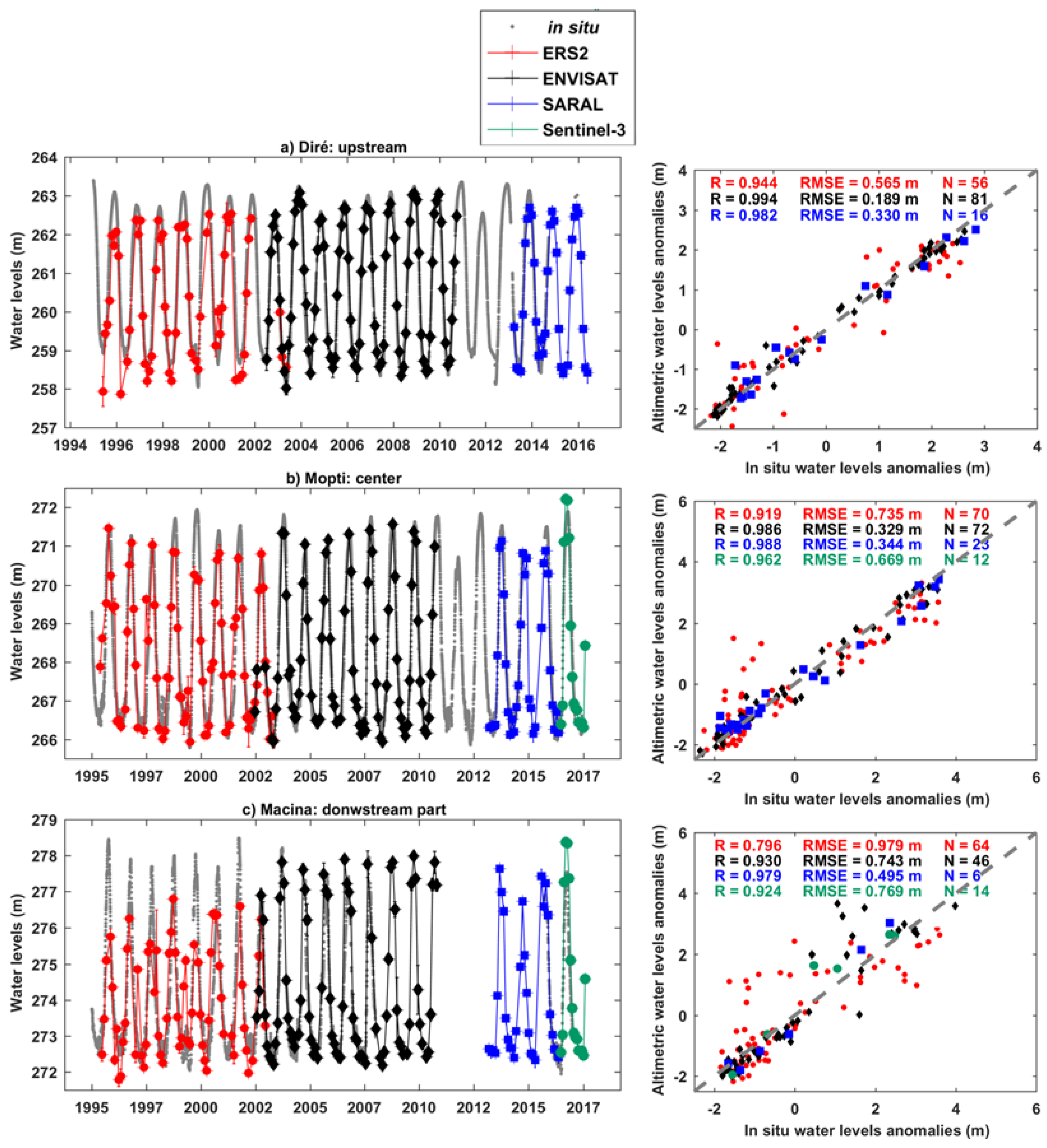
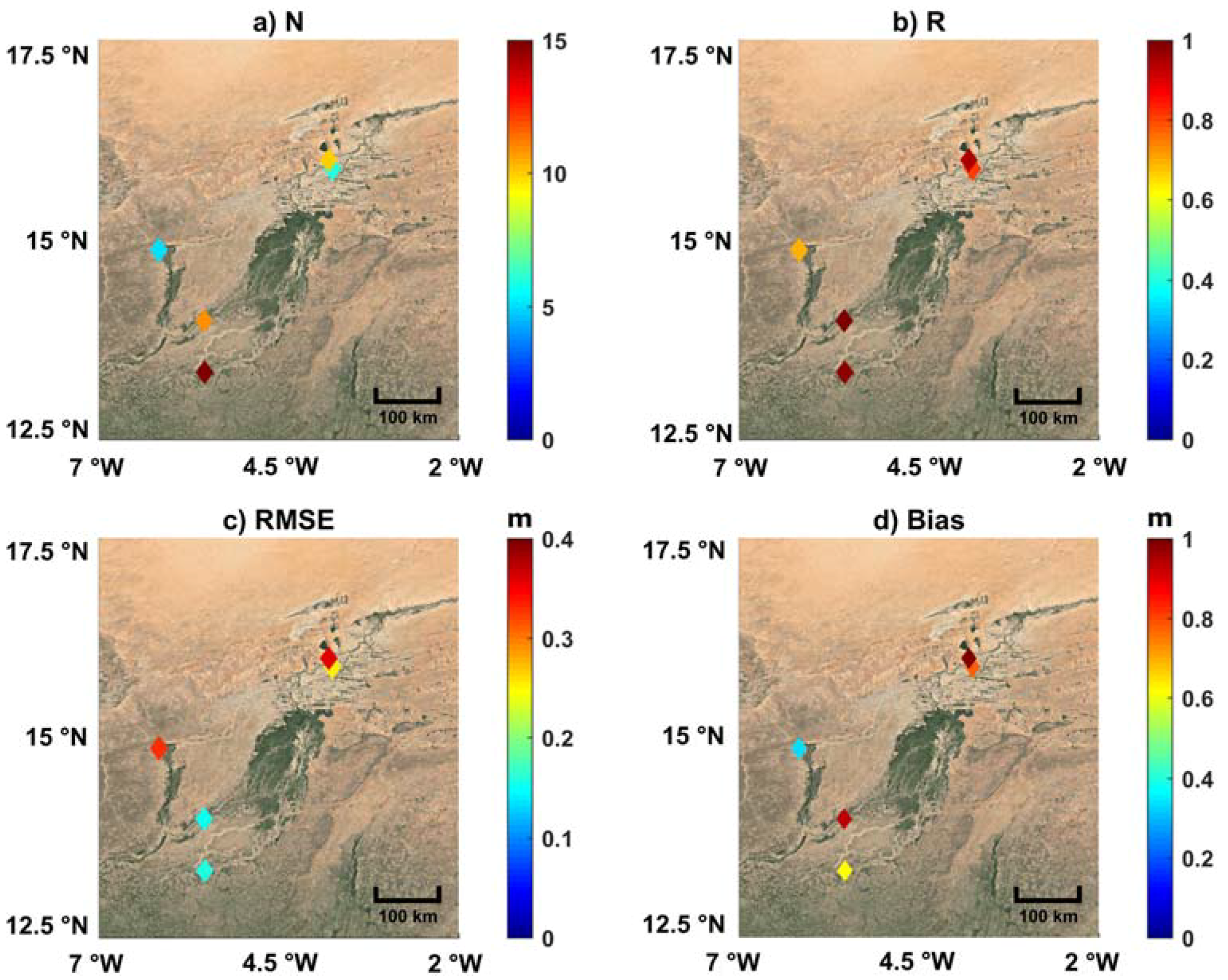
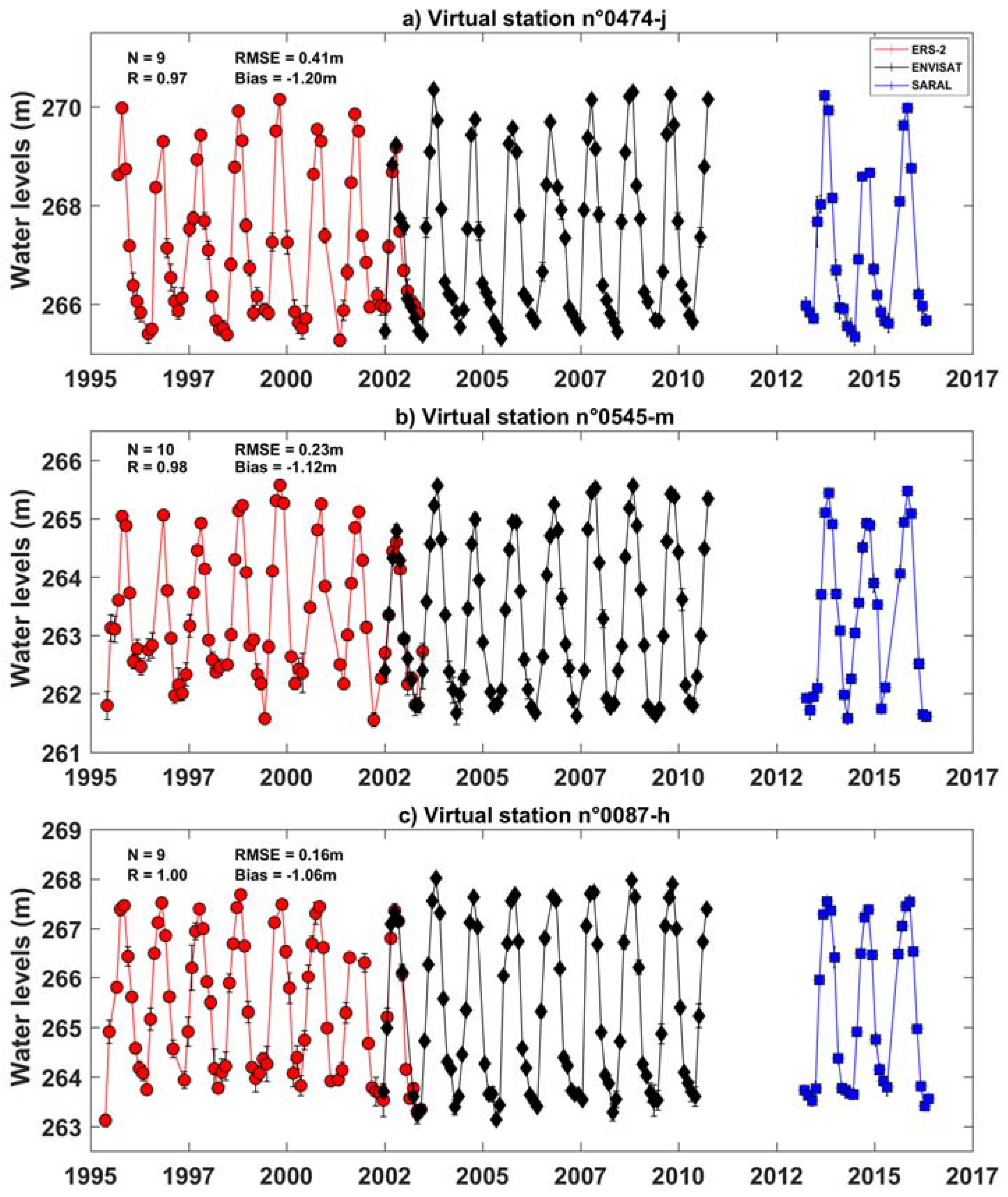
4.3. Multi-Mission Time Series on Floodplains
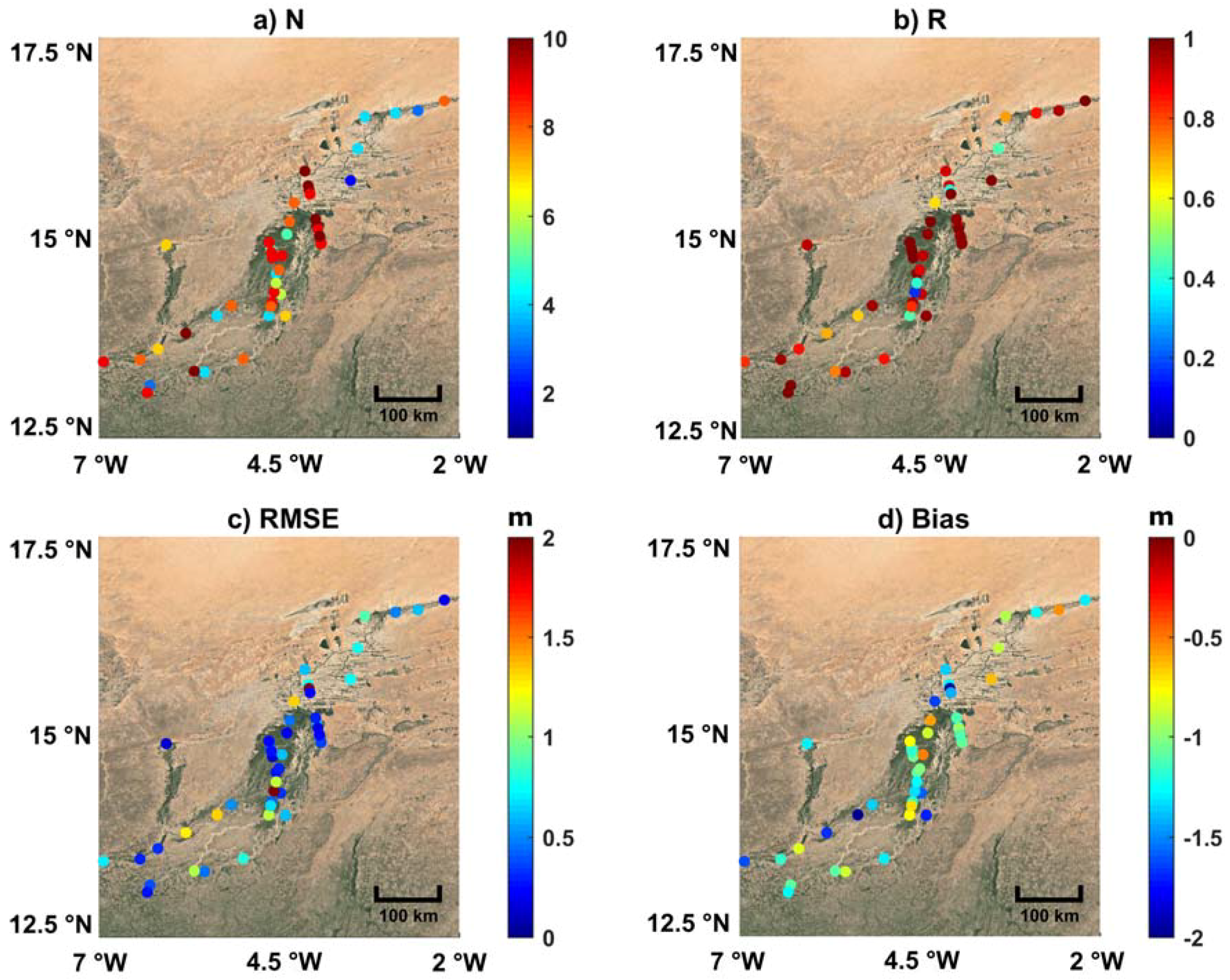
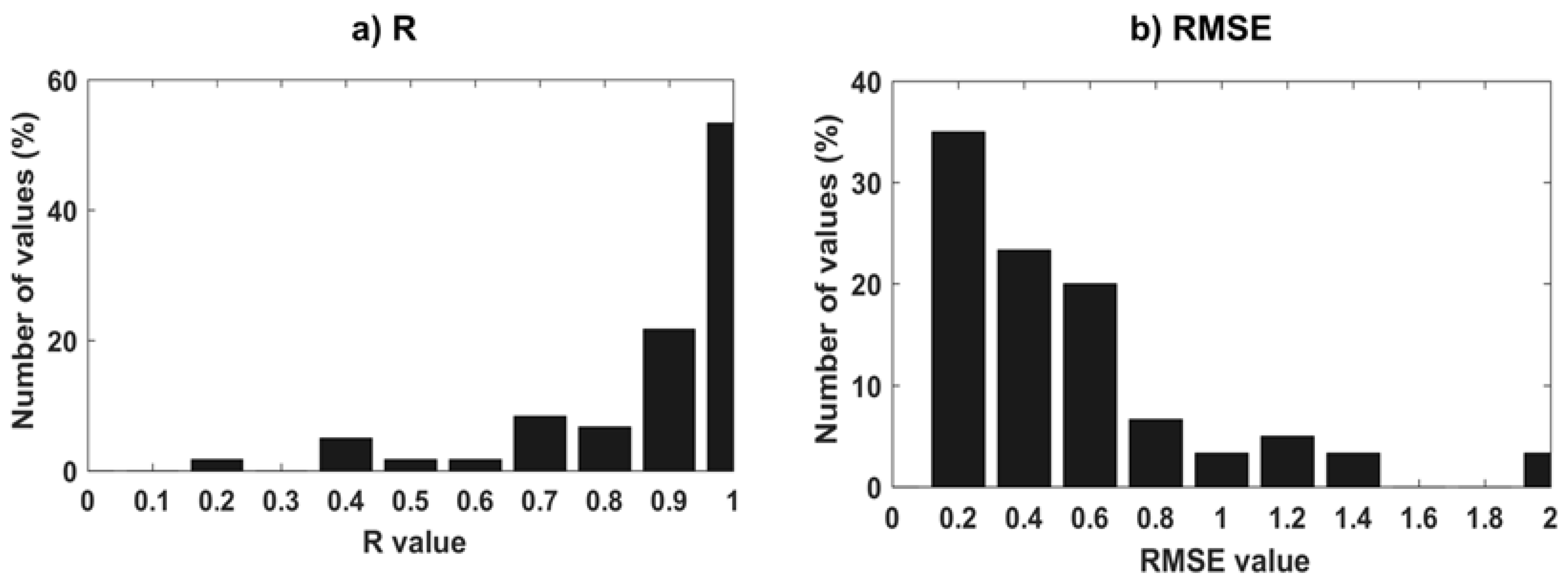
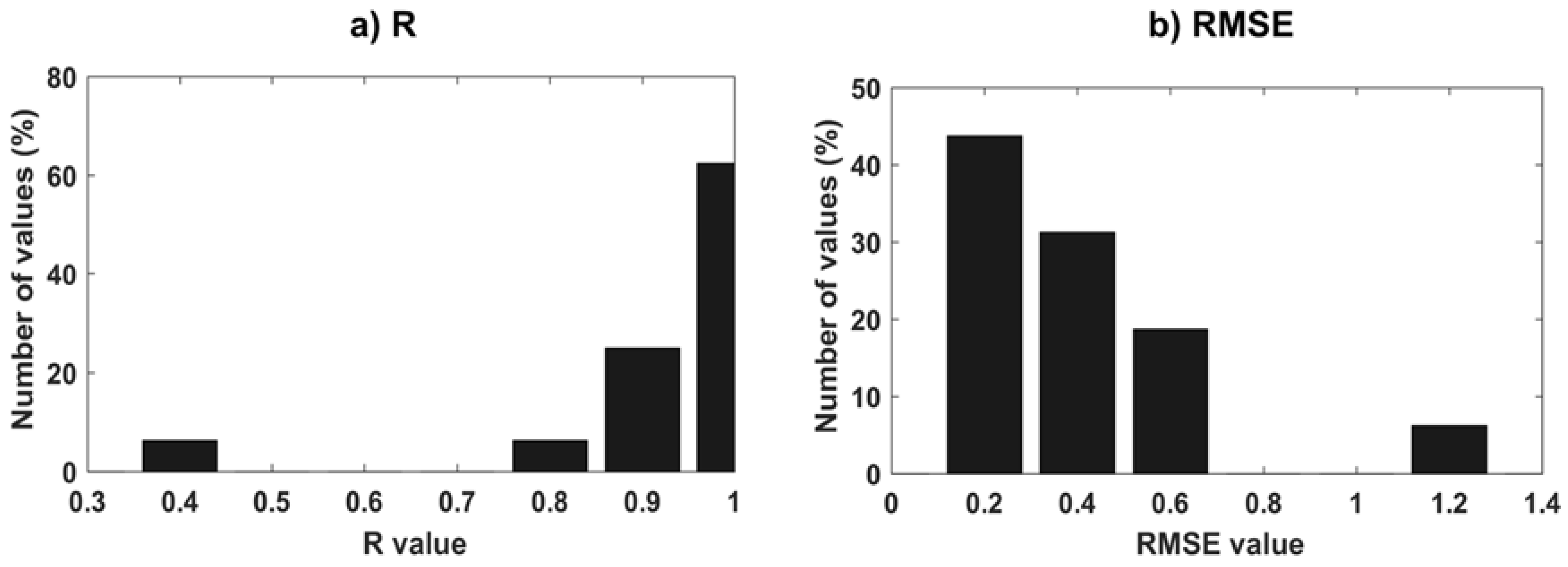
4.4. Consistency of the Altimetry-Based Water Levels in the Inner Niger Delta (IND)
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vörösmarty, C.J.; Green, P.; Salisbury, J.; Lammers, R.B. Global water resources: vulnerability from climate change and population growth. Science 2000, 289, 284–288. [Google Scholar] [CrossRef] [PubMed]
- Oki, T.; Kanae, S. Global hydrological cycles and world water resources. Science 2006, 313, 1068–1072. [Google Scholar] [CrossRef] [PubMed]
- Haddeland, I.; Heinke, J.; Biemans, H.; Eisner, S.; Flörke, M.; Hanasaki, N.; Konzmann, M.; Ludwig, F.; Masaki, Y.; Schewe, J.; et al. Global water resources affected by human interventions and climate change. Proc. Natl. Acad. Sci. USA 2014, 111, 3251–3256. [Google Scholar] [CrossRef] [PubMed]
- Gleick, P.H. Global freshwater resources: soft-path solutions for the 21st century. Science 2003, 302, 1524–1528. [Google Scholar] [CrossRef] [PubMed]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45, RG2002. [Google Scholar] [CrossRef]
- Stammer, D.; Cazenave, A. Satellite Altimetry over Oceans and Land Surfaces; Taylor & Francis: Boca Raton, FL, USA, 2017; ISBN 978-1-4987-4345-7. [Google Scholar]
- Crétaux, J.-F.; Nielsen, K.; Frappart, F.; Papa, F.; Calmant, S.; Benveniste, J. Hydrological applications of satellite altimetry: rivers, lakes, man-made reservoirs, inundated areas. In Satellite Altimetry Over Oceans and Land Surfaces; Earth Observation of Global Changes; Stammer, D., Cazenave, A., Eds.; CRC Press: Boca Raton, FL, USA, 2017; pp. 459–504. [Google Scholar]
- Morris, C.S.; Gill, S.K. Variation of Great Lakes water levels derived from Geosat altimetry. Water Resour. Res. 1994, 30, 1009–1017. [Google Scholar] [CrossRef]
- Birkett, C.M. The contribution of TOPEX/POSEIDON to the global monitoring of climatically sensitive lakes. J. Geophys. Res. 1995, 100204, 25179–25204. [Google Scholar] [CrossRef]
- Koblinsky, C.J.; Clarke, R.T.; Brenner, A.C.; Frey, H. Measurement of river level variations with satellite altimetry. Water Resour. Res. 1993, 29, 1839–1848. [Google Scholar] [CrossRef]
- Birkett, C.M. Contribution of the TOPEX NASA Radar Altimeter to the global monitoring of large rivers and wetlands. Water Resour. Res. 1998, 34, 1223. [Google Scholar] [CrossRef]
- Frappart, F.; Calmant, S.; Cauhopé, M.; Seyler, F.; Cazenave, A. Preliminary results of ENVISAT RA-2-derived water levels validation over the Amazon basin. Remote Sens. Environ. 2006, 100. [Google Scholar] [CrossRef] [Green Version]
- Frappart, F.; Legrésy, B.; Niño, F.; Blarel, F.; Fuller, N.; Fleury, S.; Birol, F.; Calmant, S. An ERS-2 altimetry reprocessing compatible with ENVISAT for long-term land and ice sheets studies. Remote Sens. Environ. 2016, 184. [Google Scholar] [CrossRef]
- Baup, F.; Frappart, F.; Maubant, J. Use of satellite altimetry and imagery for monitoring the volume of small lakes. In International Geoscience and Remote Sensing Symposium (IGARSS); 2014. [Google Scholar]
- Sulistioadi, Y.B.; Tseng, K.-H.; Shum, C.K.; Hidayat, H.; Sumaryono, M.; Suhardiman, A.; Setiawan, F.; Sunarso, S. Satellite radar altimetry for monitoring small rivers and lakes in Indonesia. Hydrol. Earth Syst. Sci. 2015, 19, 341–359. [Google Scholar] [CrossRef]
- Frappart, F.; Papa, F.; Malbeteau, Y.; León, J.G.J.G.; Ramillien, G.; Prigent, C.; Seoane, L.; Seyler, F.; Calmant, S. Surface freshwater storage variations in the orinoco floodplains using multi-satellite observations. Remote Sens. 2015, 7, 89–110. [Google Scholar] [CrossRef]
- da Silva, J.S.; Calmant, S.; Seyler, F.; Moreira, D.M.; Oliveira, D.; Monteiro, A. Radar Altimetry Aids Managing Gauge Networks. Water Resour. Manag. 2014, 28, 587–603. [Google Scholar] [CrossRef]
- Birkett, C.; Reynolds, C.; Beckley, B.; Doorn, B. From Research to Operations: The USDA Global Reservoir and Lake Monitor. In Coastal Altimetry; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2011; pp. 19–50. [Google Scholar]
- Ričko, M.; Birkett, C.M.; Carton, J.A.; Crétaux, J.-F. Intercomparison and validation of continental water level products derived from satellite radar altimetry. J. Appl. Remote Sens. 2012, 6, 61710. [Google Scholar] [CrossRef] [Green Version]
- Cretaux, J.-F.; Berge-Nguyen, M.; Leblanc, M.; Rio, R.A.D.; Delclaux, F.; Mognard, N.; Lion, C.; Pandey, R.-K.; Tweed, S.; Calmant, S.; et al. Flood mapping inferred from remote sensing data. Int. Water Technol. J. 2011, 1, 48–62. [Google Scholar]
- Goita, K.; Diepkile, A.T. Radar altimetry of water level variability in the Inner Delta of Niger River. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5262–5265. [Google Scholar]
- Frappart, F.; Fatras, C.; Mougin, E.; Marieu, V.; Diepkilé, A.T.; Blarel, F.; Borderies, P. Radar altimetry backscattering signatures at Ka, Ku, C, and S bands over West Africa. Phys. Chem. Earth 2015, 83–84, 96–110. [Google Scholar] [CrossRef]
- Tarpanelli, A.; Amarnath, G.; Brocca, L.; Massari, C.; Moramarco, T. Discharge estimation and forecasting by MODIS and altimetry data in Niger-Benue River. Remote Sens. Environ. 2017, 195, 96–106. [Google Scholar] [CrossRef]
- Tourian, M.J.; Schwatke, C.; Sneeuw, N. River discharge estimation at daily resolution from satellite altimetry over an entire river basin. J. Hydrol. 2017, 546, 230–247. [Google Scholar] [CrossRef]
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.-L.; Callahan, P.S. Chapter 1 Satellite Altimetry. In Satellite Altimetry and Earth Sciences A Handbook of Techniques and Applications; Elsevier, 2001; Volume 69, pp. 1–131. ISBN 0074-6142. [Google Scholar]
- Frappart, F.; Blumstein, D.; Cazenave, A.; Ramillien, G.; Birol, F.; Morrow, R.; Rémy, F. Satellite Altimetry: Principles and Applications in Earth Sciences. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017; pp. 1–25. ISBN 047134608X. [Google Scholar]
- Frappart, F.; Papa, F.; Marieu, V.; Malbeteau, Y.; Jordy, F.; Calmant, S.; Durand, F.; Bala, S. Preliminary Assessment of SARAL/AltiKa Observations over the Ganges-Brahmaputra and Irrawaddy Rivers. Mar. Geod. 2015, 38. [Google Scholar] [CrossRef]
- Biancamaria, S.; Frappart, F.; Leleu, A.S.; Marieu, V.; Blumstein, D.; Desjonquères, J.D.; Boy, F.; Sottolichio, A.; Valle-Levinson, A. Satellite radar altimetry water elevations performance over a 200 m wide river: Evaluation over the Garonne River. Adv. Sp. Res. 2017, 59, 128–146. [Google Scholar] [CrossRef]
- Bogning, S.; Frappart, F.; Blarel, F.; Niño, F.; Mahé, G.; Bricquet, J.P.; Seyler, F.; Onguéné, R.; Etamé, J.; Paiz, M.C.; Braun, J.J. Monitoring water levels and discharges using radar altimetry in an ungauged river basin: The case of the Ogooué. Remote Sens. 2018, 10, 350. [Google Scholar] [CrossRef]
- Biancamaria, S.; Schaedele, T.; Blumstein, D.; Frappart, F.; Boy, F.; Desjonquères, J.D.; Pottier, C.; Blarel, F.; Niño, F. Validation of Jason-3 tracking modes over French rivers. Remote Sens. Environ. 2018, 209, 77–89. [Google Scholar] [CrossRef]
- Frappart, F.; Roussel, N.; Biancale, R.; Martinez Benjamin, J.J.; Mercier, F.; Perosanz, F.; Garate Pasquin, J.; Martin Davila, J.; Perez Gomez, B.; Gracia Gomez, C.; et al. The 2013 Ibiza Calibration Campaign of Jason-2 and SARAL Altimeters. Mar. Geod. 2015, 38. [Google Scholar] [CrossRef]
- Vu, P.; Frappart, F.; Darrozes, J.; Marieu, V.; Blarel, F.; Ramillien, G.; Bonnefond, P.; Birol, F. Multi-Satellite Altimeter Validation along the French Atlantic Coast in the Southern Bay of Biscay from ERS-2 to SARAL. Remote Sens. 2018, 10, 93. [Google Scholar] [CrossRef]
- Jekeli, C. Geometric Reference System in Geodesy; Division of Geodesy and Geospatial Science School of Earth Sciences, Ohio State University: Columbus, OH, USA, 2006. [Google Scholar]
- Salameh, E.; Frappart, F.; Marieu, V.; Spodar, A.; Parisot, J.P.; Hanquiez, V.; Turki, I.; Laignel, B. Monitoring sea level and topography of coastal lagoons using satellite radar altimetry: The example of the Arcachon Bay in the Bay of Biscay. Remote Sens. 2018, 10, 297. [Google Scholar] [CrossRef]
- Mahé, G.; Bamba, F.; Soumaguel, A.; Orange, D.; Olivry, J.C. Water losses in the inner delta of the River Niger: water balance and flooded area. Hydrol. Process. 2009, 23, 3157–3160. [Google Scholar] [CrossRef]
- De Noray, M.-L. Delta intérieur du fleuve Niger au Mali–quand la crue fait la loi: l’organisation humaine et le partage des ressources dans une zone inondable à fort contraste. VertigO-la Rev. électronique en Sci. l’ Environ. 2003, 4, 1–9. [Google Scholar] [CrossRef]
- Zwarts, L. The Niger, A Lifeline: Effective Water Management in the Upper Niger Basin; RIZA: Lelystad, 2005; ISBN 978-90-807150-6-6. [Google Scholar]
- Jones, K.; Lanthier, Y.; van der Voet, P.; van Valkengoed, E.; Taylor, D.; Fernández-Prieto, D. Monitoring and assessment of wetlands using Earth Observation: The GlobWetland project. J. Environ. Manag. 2009, 90, 2154–2169. [Google Scholar] [CrossRef] [PubMed]
- Bergé-Nguyen, M.; Crétaux, J.-F. Inundations in the Inner Niger Delta: Monitoring and Analysis Using MODIS and Global Precipitation Datasets. Remote Sens. 2015, 7, 2127–2151. [Google Scholar] [CrossRef]
- Ogilvie, A.; Belaud, G.; Delenne, C.; Bailly, J.-S.; Bader, J.-C.; Oleksiak, A.; Ferry, L.; Martin, D. Decadal monitoring of the Niger Inner Delta flood dynamics using MODIS optical data. J. Hydrol. 2015, 523, 368–383. [Google Scholar] [CrossRef]
- Benveniste, J.; Roca, M.; Levrini, G.; Vincent, P.; Baker, S.; Zanife, O.; Zelli, C.; Bombaci, O. The radar altimetry mission: RA-2, MWR, DORIS and LRR. ESA Bull. 2001, 106, 25101–25108. [Google Scholar]
- Steunou, N.; Desjonquères, J.D.; Picot, N.; Sengenes, P.; Noubel, J.; Poisson, J.C. AltiKa Altimeter: Instrument Description and In Flight Performance. Mar. Geod. 2015, 38, 22–42. [Google Scholar] [CrossRef]
- Taylor, P.; Perbos, J.; Escudier, P.; Parisot, F.; Zaouche, G.; Vincent, P.; Menard, Y.; Manon, F.; Kunstmann, G.; Royer, D.; et al. Jason-1: Assessment of the System Performances Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 37–41. [Google Scholar] [CrossRef]
- Desjonquères, J.D.; Carayon, G.; Steunou, N.; Lambin, J. Poseidon-3 Radar Altimeter: New Modes and In-Flight Performances. Mar. Geod. 2010, 33, 53–79. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Wingham, D.J.; Rapley, C.G.; Griffiths, H. New Techniques in Satellite Altimeter Tracking Systems. Proc. IGARSS Symp. Zurich 1986, 1339–1344. [Google Scholar]
- Frappart, F.; Do Minh, K.; L’Hermitte, J.; Cazenave, A.; Ramillien, G.; Le Toan, T.; Mognard-Campbell, N. Water volume change in the lower Mekong from satellite altimetry and imagery data. Geophys. J. Int. 2006, 167. [Google Scholar] [CrossRef]
- Santos da Silva, J.; Calmant, S.; Seyler, F.; Rotunno Filho, O.C.; Cochonneau, G.; Mansur, W.J. Water levels in the Amazon basin derived from the ERS 2 and ENVISAT radar altimetry missions. Remote Sens. Environ. 2010, 114, 2160–2181. [Google Scholar] [CrossRef]
- Cartwright, D.E.; Edden, A.C. Corrected Tables of Tidal Harmonics. Geophys. J. R. Astron. Soc. 1973, 33, 253–264. [Google Scholar] [CrossRef]
- Wahr, J.M. Deformation induced by polar motion. J. Geophys. Res. 1985, 90, 9363. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Jelinski, W.; Calmant, S.; Kouraev, A.; Vuglinski, V.; Bergé-Nguyen, M.; Gennero, M.C.; Nino, F.; Abarca Del Rio, R.; Cazenave, A.; Maisongrande, P. SOLS: A lake database to monitor in the Near Real Time water level and storage variations from remote sensing data. Adv. Sp. Res. 2011, 47, 1497–1507. [Google Scholar] [CrossRef]
- Frappart, F.; Biancamaria, S.; Normandin, C.; Blarel, F.; Bourrel, L.; Aumont, M.; Azemar, P.; Vu, P.-L.; Le Toan, T.; Lubac, B.; et al. Influence of recent climatic events on the surface water storage of the Tonle Sap Lake. Sci. Total Environ. 2018, 636, 1520–1533. [Google Scholar] [CrossRef]
- Frappart, F.; Papa, F.; Famiglietti, J.S.; Prigent, C.; Rossow, W.B.; Seyler, F. Interannual variations of river water storage from a multiple satellite approach: A case study for the Rio Negro River basin. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Shum, C.K.; Yi, Y.; Ibaraki, M.; Kim, J.W.; Braun, A.; Kuo, C.Y.; Lu, Z. Louisiana wetland water level monitoring using retracked TOPEX/POSEIDON altimetry. Mar. Geod. 2009, 32, 284–302. [Google Scholar] [CrossRef]
- Frappart, F.; Papa, F.; Güntner, A.; Werth, S.; Santos da Silva, J.; Tomasella, J.; Seyler, F.; Prigent, C.; Rossow, W.B.; Calmant, S.; Bonnet, M.-P. Satellite-based estimates of groundwater storage variations in large drainage basins with extensive floodplains. Remote Sens. Environ. 2011, 115. [Google Scholar] [CrossRef] [Green Version]
- da Silva, J.S.; Seyler, F.; Calmant, S.; Filho, O.C.R.; Roux, E.; Araújo, A.A.M.; Guyot, J.L. Water level dynamics of Amazon wetlands at the watershed scale by satellite altimetry. Int. J. Remote Sens. 2012, 33, 3323–3353. [Google Scholar] [CrossRef]
- Zakharova, E.A.; Kouraev, A.V.; Rémy, F.; Zemtsov, V.A.; Kirpotin, S.N. Seasonal variability of the Western Siberia wetlands from satellite radar altimetry. J. Hydrol. 2014, 512, 366–378. [Google Scholar] [CrossRef]
- Bonnefond, P.; Verron, J.; Aublanc, J.; Babu, K.; Bergé-Nguyen, M.; Cancet, M.; Chaudhary, A.; Crétaux, J.-F.; Frappart, F.; Haines, B.; et al. The Benefits of the Ka-Band as Evidenced from the SARAL/AltiKa Altimetric Mission: Quality Assessment and Unique Characteristics of AltiKa Data. Remote Sens. 2018, 10, 83. [Google Scholar] [CrossRef]
- Keith Raney, R. The delay/doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | Jason-1/2/3 | ERS-2 ENVISAT | SARAL | Sentinel-3A |
|---|---|---|---|---|
| Instrument | Poseidon-2 Poseidon-3 Poseidon-3B | Radar Altimeter (RA) Radar Altimeter (RA-2) | AltiKa | Sar Radar Altimeter (SRAL) |
| Space agency | Centre National d’Etudes Spatiales (CNES), National Aeronautics and Space Administraion (NASA) | European Space Agency (ESA) | CNES, Indian Space Research Organization (ISRO) | European Space Agency (ESA) |
| Operation | 2001–2013 Since 2008 Since 2016 | 1995–2003 2002–2012 | Since 2013 | Since 2016 |
| Acquisition mode | Low Resolution Mode (LRM) | LRM | LRM | Pseudo Low Resolution Mode (PLRM), SAR |
| Acquisition | Along-track | Along-track | Along-track | Along-track |
| Frequency (GHz) | 13.575 (Ku) 5.3 (C) | 13.8 (Ku) 13.575 (Ku) 3.2 (S) | 35.75 (Ka) | 13.575 (Ku) 5.41 (C) |
| Altitude (km) | 1315 | 800 | 800 | 814.5 |
| Orbit inclination (°) | 66 | 98.55 | 98.55 | 98.65 |
| Repetitively (days) | 9.9156 | 35 | 35 | 27 |
| Equatorial cross-track separation (km) | 315 | 75 | 75 | 104 |
| Altimetry Mission | Jason-1 | Jason-2 | Jason-3 | ERS-2 | ENVISAT | SARAL | Sentinel-3A |
|---|---|---|---|---|---|---|---|
| GDR | E | D | D | Centre de Topographie des Océans et de l’Hydrosphère (CTOH) [13] | V2.1 | T | ESA IPF 06.07 land |
| Along-track sampling | 20 Hz | 20 Hz | 20 Hz | 20 Hz | 18 Hz | 40 Hz | 20 Hz |
| Retracker | ICE | ICE | ICE | ICE-1 | ICE-1 | ICE-1 | Offset Centre of gravity (OCOG) |
| ΔRiono | GIM-based | ||||||
| ΔRdry | European Centre for Medium-Range Weather Forecasts (ECMWF)-based using Digital Elevation Model (DEM) | ECMWF-based using h from altimeter | ECMWF-based using DEM | ||||
| ΔRwet | ECMWF-based using DEM | ||||||
| ΔRsolid Earth | Based on Catwright et al. [49] | ||||||
| ΔRpole | Based on Wahr et al. [50] | ||||||
| In Situ Gauge Station | Longitude (°) | Latitude (°) | Validation Period |
|---|---|---|---|
| Akka | −4.23 | 15.39 | 1992–2017 |
| Diondiori | −4.78 | 14.61 | 2008–2010 |
| Diré | −3.38 | 16.27 | 1991–2017 |
| Douna | −5.90 | 13.22 | 1991–2004 |
| Goundam | −3.65 | 16.42 | 2009–2017 |
| Kakagnan | −4.33 | 14.93 | 2008–2010 |
| Kara | −5.01 | 14.16 | 1992–2011 |
| Kirango | −6.07 | 13.7 | 2015–2017 |
| Konna | −3.9 | 14.95 | 1992–1999 |
| Koryoumé | −3.03 | 16.67 | 1992–2017 |
| Macina | −5.29 | 14.14 | 1991–2017 |
| Mopti | −4.18 | 14.48 | 1991–2017 |
| Sévéri | −4.19 | 14.75 | 2008–2010 |
| Sormé | −4.4 | 14.87 | 2008–2010 |
| Sossobé | −4.67 | 14.56 | 2008–2010 |
| Tilembeya | −4.98 | 14.15 | 1991–2006 |
| Toguéré Kou | −4.59 | 14.93 | 2008–2010 |
| Tonka | −3.76 | 16.11 | 1991–2017 |
| Tou | −4.52 | 14.13 | 2008–2010 |
| Mission | ERS-2 | ENVISAT | SARAL | Sentinel-3A | Jason-1 | Jason-2 | Jason-3 |
|---|---|---|---|---|---|---|---|
| Number of virtual stations (VS) | 52 | 63 | 62 | 31 | 8 | 8 | 9 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Normandin, C.; Frappart, F.; Diepkilé, A.T.; Marieu, V.; Mougin, E.; Blarel, F.; Lubac, B.; Braquet, N.; Ba, A. Evolution of the Performances of Radar Altimetry Missions from ERS-2 to Sentinel-3A over the Inner Niger Delta. Remote Sens. 2018, 10, 833. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10060833
Normandin C, Frappart F, Diepkilé AT, Marieu V, Mougin E, Blarel F, Lubac B, Braquet N, Ba A. Evolution of the Performances of Radar Altimetry Missions from ERS-2 to Sentinel-3A over the Inner Niger Delta. Remote Sensing. 2018; 10(6):833. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10060833
Chicago/Turabian StyleNormandin, Cassandra, Frédéric Frappart, Adama Telly Diepkilé, Vincent Marieu, Eric Mougin, Fabien Blarel, Bertrand Lubac, Nadine Braquet, and Abdramane Ba. 2018. "Evolution of the Performances of Radar Altimetry Missions from ERS-2 to Sentinel-3A over the Inner Niger Delta" Remote Sensing 10, no. 6: 833. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10060833